采用双闭环PID控制及PSO算法的双足轮式倒立摆控制系统
两轮自平衡小车双闭环PID控制设计
两轮⾃平衡⼩车双闭环PID控制设计两轮⾃平衡⼩车的研究意义1.1两轮平衡车的研究意义两轮平衡车是⼀种能够感知环境,并且能够进⾏分析判断然后进⾏⾏为控制的多功能的系统,是移动机器⼈的⼀种。
在运动控制领域中,为了研究控制算法,建⽴两轮平衡车去验证控制算法也是⾮常有⽤的,这使得在研究⾃动控制领域理论时,两轮平衡车也被作为课题,被⼴泛研究。
对于两轮平衡车模型的建⽴、分析以及控制算法的研究是课题的研究重点和难点。
设计的两轮平衡车实现前进、后退、转弯等功能是系统研究的⽬的,之后要对车⼦是否能够爬坡、越野等功能进⾏测试。
⼀个⾼度不稳定,其动⼒学模型呈现多变量、系统参数耦合、时变、不确定的⾮线性是两轮平衡车两轮车研究内容的难点,其运动学中的⾮完整性约束要求其控制任务的多重性,也就是说要在平衡状态下完成指定的控制任务,如在复杂路况环境下实现移动跟踪任务,这给系统设计带来了极⼤的挑战。
因此可以说两路平衡车是⼀个相对⽐较复杂的控制系统,这给控制⽅法提出了很⾼的要求,对控制理论⽅法提出来很⼤的挑战,是控制⽅法实现的典型平台,得到该领域专家的极⼤重视,成为具有挑战性的控制领域的课题之⼀。
两轮平衡车是⼀个复杂系统的实验装置,其控制算法复杂、参数变化⼤,是理论研究、实验仿真的理想平台。
在平衡车系统中进⾏解賴控制、不确定系统控制、⾃适应控制、⾮线性系统控制等控制⽅法的研究,具有物理意义明显、⽅便观察的特点,并且平衡车从造价来说不是很贵,占地⾯积⼩,是很好的实验⼯具,另外建⽴在此基础上的平衡系统的研究,能够适应复杂环境的导航、巡视等,在⼯业⽣产和社会⽣中具有⾮常⼤的应⽤潜⼒。
两轮平衡车所使⽤的控制⽅法主要有:状态回馈控制、PID控制、最优控制、极点回馈控制等,这些控制⽅法被称为传统控制⽅法。
1.2 本⽂研究内容(1)两轮⾃平衡⼩车的简单控制系统设计。
(2)基于倒⽴摆模型的两轮⾃平衡⼩车的数学建模。
(3)利⽤MATLAB⼯具进⾏两轮⾃平衡⼩车的系统控制⽅法分析。
PSO算法及在二自由度PID调节器优化设计中的应用

P O 算法 及在 二 自由度 P D 调 节 器优 化 设 计 中的 应 用 S I
王 海稳 , 井 岗 戴跃 伟 张 ,
(.南京 理 工 大 学 自动化 学 院 , 1 南京 2 0 9 ,. 原科 技 大 学 电子 信 息 工 程 学 院 , 原 1 0 42 太 太 002) 30 4
Ve y o d y a c e p n e ef r n e f o h h c mma d rc ig n d s u b n e ee t n r g o d n mi r s o s p ro ma c o b t t e o n ta kn a d it r a c r jc i o
倒立摆论文

倒立摆系统的设计摘要倒立摆是一个非线性、强耦合、多变量和自然不稳定的系统。
通过它能有效地反映控制过程中诸如可镇定性、鲁棒性、随动性以及跟踪等多种关键问题,是检验各种控制理论的理想模型。
对倒立摆系统的研究不仅具有很重要的理论意义,而且在航天科技和机器人学领域中也有现实指导性意义。
本文以直线二级倒立摆模型为控制对象,阐述了倒立摆稳定控制的研究现状以及倒立摆系统的控制系统及机械结构组成。
在数学模型的基础上,重点分析基于Lagrange方程进行数学模型的方法,以及系统的能控性和能观测性。
接着进行了倒立摆系统的LQR控制方法研究。
运用最优控制理论,探讨了加权矩阵Q 和R的选取方法。
然后利用Matlab软件建立倒立摆系统模型,对二级倒立摆的LQR控制器进行了设计与仿真,利用Simulink建立了二级倒立摆的LQR控制模型,实现了二级倒立摆系统的稳定控制。
结果表明本文所给出的控制策略是有效的。
最后对倒立摆系统时滞问题进行了分析,给出了系统稳定性的判别公式。
关键词:倒立摆;Lagrange方程;数学模型;最优控制;SIMULINKDesign of Inverted Pendulum SystemABSTRACTInverted pendulum is a nonlinear,coupling,variable and natural unsteadiness system.During the controlprocess,pendulum can effectively reflect many pivotal problems such as equanimity, robust,follow-up and track.Therefore,it is a perfect model used to testing various control theories.Studying on inverted pendulum not only has a very important theory significance,but also has a realistic directory meaning in aerospace science and technology and robotics.In this paper,we establish mathematical models of double inverted pendulum system,and analyze the controllability and observability of these models.According to the theoretical analysis,this paper puts forward a solution that it is found by Linear Quadratic Optimal Control Theory.In the following,we design a double inverted pendulum’s controller based on the theory.Based on introducing the present established mathematical model,the method of the Mathematical model was done by analyzing the Lagrange equation. And the system characteristic was briefly analyzed.Next we do research on LQR control algorithm of inverted pendulum system.By using optimization control theory,the selection of matrix Q and R is dicussed.It is introduced how to realize the simulation of the inverted pendulum system by the Matlab.Double inverted pendulum LQR controller is designed and emulated.LQR control model is programmed by Simulink, control of double inverted pendulum hardware system is realized.And it indicates that the control strategy proposed in this paper is effctive.Finally,we analysis the time-delay problem of double inverted pendulum system, get the giscriminant formula of the Stability of the system.Keywords: inverted pendulum;Lagrange equation;mathematical model;optimization control theory;Simulink目录1绪论 (1)1.1倒立摆系统研究的意义和前景 (1)1.2倒立摆系统的研究现状 (1)1.3课题任务 (2)2倒立摆系统建模与性能分析 (3)2.1系统数学模型的建立 (3)2.1.1倒立摆系统的运动分析 (3)2.1.2模型建立的基本方法 (4)2.1.3模型的建立 (4)2.2倒立摆系统性能分析 (8)2.2.1系统稳定性原理 (8)2.2.2系统能控性和能观性 (9)2.2.3二级倒立摆系统性能 (9)3 倒立摆系统控制与仿真 (11)3.1 LQR理论基础 (11)3.1.1 线性二次型问题 (11)3.1.2无限时间状态调节器问题 (12)3.2矩阵黎卡提方程的求解 (12)3.3 Simulink概述 (12)3.4二级倒立摆最优控制器的设计 (13)3.4.1最优控制器的设计 (13)3.4.2二级倒立摆系统仿真 (14)4倒立摆系统的实时控制 (17)4. 1硬件在回路仿真技术 (17)4.2系统实现方案介绍 (17)4.3系统实时性分析 (18)4.4系统实现方案确定 (20)4.5本章小结 (20)5摆系统时滞问题 (21)5.1 系统的稳定性 (21)5.2小结 (23)6 结论 (24)谢辞 (25)参考文献 (26)附录A (27)附录B (34)1 绪论1.1倒立摆系统研究的意义和前景倒立摆系统是一个非线性程度严重的高阶不稳定系统,也是一个典型的多变量系统。
基于双闭环PID控制的一阶倒立摆控制系统设计
基于双闭环PID控制的一阶倒立摆控制系统设计一阶倒立摆是一种常见的控制系统,它由一个旋转臂和一个悬挂在旋转臂末端的摆杆组成。
控制目标是使摆杆保持垂直位置并保持在指定的角度范围内。
本文将基于双闭环PID控制设计一阶倒立摆控制系统,并对其进行详细的分析和讨论。
首先,我们需要明确控制系统的结构。
一阶倒立摆控制系统可以分为两个闭环:内环和外环。
内环用于控制旋转臂的角度,并将输出作为外环的输入。
外环用于控制摆杆的角度,并根据测量的摆杆角度和设定的目标角度来调整内环的输入。
在进行控制系统设计之前,我们需要先建立一阶倒立摆的数学模型。
假设倒立摆的质量集中在摆杆的一端,摆杆的长度为L,质量为m,摩擦系数为b,重力加速度为g。
通过应用牛顿第二定律,可以得到如下动力学方程:mL²θ¨ + bLθ˙ + mgLsinθ = u其中,θ是旋转臂的角度,u是旋转臂的扭矩。
为了简化方程,我们进行恒定参数修正和线性化处理,得到线性方程:θ¨ + 2ξωnθ˙ + ωn²θ = kru其中,ξ是阻尼比,ωn是无阻尼自然频率,kr是旋转臂的增益。
接下来,我们将按照以下步骤设计基于双闭环PID控制的一阶倒立摆控制系统:1.内环设计:-选择合适的内环闭环控制器类型。
对于一阶倒立摆,可以选择PID控制器。
-根据倒立摆的特性和性能要求,选择合适的PID参数。
可以使用试错法、经验法、系统辨识等方法进行参数调整。
-将PID控制器的输入设置为旋转臂角度误差,输出为旋转臂的扭矩。
2.外环设计:-选择合适的外环闭环控制器类型。
对于一阶倒立摆,可以选择PID控制器。
-根据倒立摆的特性和性能要求,选择合适的PID参数。
-将PID控制器的输入设置为摆杆角度误差,输出为旋转臂的角度设定值。
3.进行系统仿真和调试:-使用MATLAB等仿真工具建立一阶倒立摆的数学模型,并将设计的控制器与模型进行集成。
-调整控制器的参数,以满足性能指标和系统稳定性的要求。
基于双闭环PID控制的一阶倒立摆控制系统设计

自动控制原理课程设计说明书基于双闭环PID控制的一阶倒立摆控制系统设计姓名:学号:学院:专业:指导教师:2018年 1月目录1 任务概述 (3)1.1设计概述 (3)1.2 要完成的设计任务: (4)2系统建模 (4)2.1 对象模型 (4)2.2 模型建立及封装 (5)3仿真验证 (9)3.1 实验设计 (9)3.2 建立M文件编制绘图子程序 (9)4 双闭环PID控制器设计 (12)4.1内环控制器的设计 (13)4.2外环控制器的设计 (13)5 仿真实验 (15)5.1简化模型 (15)5.2 仿真实验 (17)6 检验系统的鲁棒性 (18)6.1 编写程序求系统性能指标 (18)6.2 改变参数验证控制系统的鲁棒性 (19)7 结论 (22)附录 (22)1 任务概述1.1设计概述如图1 所示的“一阶倒立摆控制系统”中,通过检测小车位置与摆杆的摆动角,来适当控制驱动电动机拖动力的大小,控制器由一台工业控制计算机(IPC)完成。
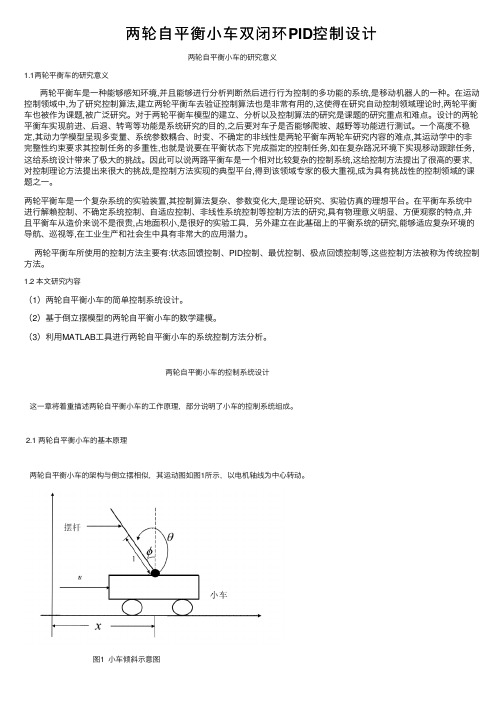
图1 一阶倒立摆控制系统这是一个借助于“SIMULINK封装技术——子系统”,在模型验证的基础上,采用双闭环PID控制方案,实现倒立摆位置伺服控制的数字仿真实验。
1.2 要完成的设计任务:(1)通过理论分析建立对象模型(实际模型),并在原点进行线性化,得到线性化模型;将实际模型和线性化模型作为子系统,并进行封装,将倒立摆的振子质量m和倒摆长度L作为子系统的参数,可以由用户根据需要输入;(2)设计实验,进行模型验证;(3)一阶倒立摆系统为“自不稳定的非最小相位系统”。
将系统小车位置作为“外环”,而将摆杆摆角作为“内环”,设计内化与外环的PID控制器;(4)在单位阶跃输入下,进行SIMULINK仿真;(5)编写绘图程序,绘制阶跃响应曲线,并编程求解系统性能指标:最大超调量、调节时间、上升时间;(6)检验系统的鲁棒性:将对象的特性做如下变化后,同样在单位阶跃输入下,检验所设计控制系统的鲁棒性能,列表比较系统的性能指标(最大超调量、调节时间、上升时间)。
Pid控制直流双闭环调速系统ppt课件

比例部分
比例部分的数学式表示是:Kp*e(t)
在模拟 PID 控制器中,比例环节的作用是对偏差瞬间作 出反应。偏差一旦产生控制器立即产生控制作用,使控制量 向减少偏差的方向变化。控制作用的强弱取决于比例系数 Kp ,比例系数Kp越大,控制作用越强,则过渡过程越快, 控制过程的静态偏差也就越小;但是Kp越大,也越容易产生 振荡,破坏系统的稳定性。故而,比例系数Kp选择必须恰当, 才能过渡时间少,静差小而又稳定的效果。
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
直流双闭环调速系统
单闭环直流调速系统 同开环调速系统一样,转速闭环调速系统
中电机的转速大小受转速给定电压Un*控制, 给定电压为零时,电机停止;给定电压增大 时,电机转速升高;给定电压减小时,电机 转速下降。
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
整定方法
凑试法 临界比例法 经验法
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
这种算法的缺点是:由于全量输出,所以每次 输出均与过去状态有关,计算时要对ek进行累加,工作 量大;并且,因为计算机输出的uk对应的是执行机构的 实际位置,如果计算机出现故障,输出的u将大幅度变 化,会引起执行机构的大幅度变化,有可能因此造成严 重的生产事故,这在实生产际中是不允许的。
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
一阶直线倒立摆双闭环PID控制仿真报告

目录摘要 (2)一、一阶倒立摆系统建模 (3)1、对象模型 (3)2、电动机、驱动器及机械传动装置的模型 (4)二、双闭环PID控制器设计 (5)1、仿真验证 (6)2、内环控制器的设计 (9)3、系统外环控制器设计 (12)三、仿真实验 (15)1、绘图子程序 (15)2、仿真结果 (16)四、结论 (18)摘要本报告旨在借助Matlab 仿真软件,设计基于双闭环PID 控制的一阶倒立摆控制系统。
在如图0.1所示的“一阶倒立摆控制系统”中,通过检测小车的位置与摆杆的摆动角,来适当控制驱动电动机拖动力的大小,控制器由一台工业控制计算机(IPC )完成。
图0.1 一阶倒立摆控制系统分析工作原理,可以得出一阶倒立摆系统原理方框图:图0.2 一阶倒立摆控制系统动态结构图本报告将借助于“Simulink 封装技术——子系统”,在模型验证的基础上,采用双闭环PID 控制方案,实现倒立摆位置伺服控制的数字仿真实验。
一、一阶倒立摆系统建模1、对象模型如图1.1所示,设小车的质量为m 0,倒立摆均匀杆的质量为m ,摆长为2l ,摆的偏角为θ,小车的位移为x ,作用在小车上的水平方向的力为F ,O 1为摆角质心。
θxyOFF xF x F yF yllxO 1图1.1 一阶倒立摆的物理模型根据刚体绕定轴转动的动力学微分方程,转动惯量与角加速度乘积等于作用于刚体主动力对该轴力矩的代数和,则 1)摆杆绕其中心的转动方程为θθθcos sin y l F l F J x-= (1-1) 2)摆杆重心的水平运动可描述为)sin (22x θl x dtd m F += (1-2)3)摆杆重心在垂直方向上的运动可描述为)cos (22y θl dtd m mg F =- (1-3)4)小车水平方向上的运动可描述为220dtxd m F F x =- (1-4)由式(1-2)和式(1-4)得F ml x m m =⋅-⋅++)sin (cos )(20θθθθ (1-5) 由式(1-1)、(式1-2)和式(1-3)得θθθsin g cos 2ml x ml ml J =⋅++ )( (1-6) 整理式(1-5)和式(1-6),得⎪⎪⎩⎪⎪⎨⎧++-+-⋅+⋅=-++-⋅+++=))((cos sin )(cos sin cos cos ))((cos sin sin )()(x 2022202222220222222m l J m m l m m l m m l m F m l l m m m m l J g l m m l J lm F m l J θθθθθθθθθθθθ(1-7) 以上式1-7为一阶倒立摆精确模型。
双轮自平衡车的双闭环式PID控制系统设计与实现

双轮自平衡车的双闭环式PID控制系统设计与实现摘要:双轮自平衡车是一种集环境感知、规划决策、自主驾驶等功能为一体的综合性系统。
提出了一种双闭环式PID控制系统实现双轮自平衡车的控制。
针对传统的PID控制算法的缺陷,该系统引入了双闭环式PID改进平衡车的控制算法。
同时对平衡车的硬件系统与软件控制系统进行了设计、实现与分析。
实验表明:所提出的控制系统是有效可行的,提高了平衡车的稳定性和动态响应性。
关键词:双轮自平衡车;PID控制算法;双闭环式PID控制系统传统的PID控制算法在平衡车控制系统中的应用存在很大的缺陷。
在传统的PID控制器中,积分控制环节的引入是为了消除被控量的静态误差,以提高控制精度;在平衡车控制系统中,由于平衡车在启动过程或车体在较差的路况中运行,车体倾角会发生大幅度地变化,平衡车系统在较短的时间内会产生较大的输出偏差。
此时,PlD控制器中的积分控制环节会导致系统产生较大的超调,甚至导致平衡车产生较大的震荡。
除此之外,传统的PID控制器忽略了平衡车中两个电机的性能差异,对两个电机采用同一个PID控制器,容易引起车体产生震荡。
本文提出了一种双闭环式PID控制系统,其避免了PID控制器中的积分环节在平衡车的倾角发生大幅度地变化的情况下引起的超调和震荡,解决平衡车两个电机性能差异对平衡车控制系统的干扰,提高了平衡车控制系统的稳定性。
1平衡车的优势及机械结构1.1平衡车的优势l、转向半径小,小巧灵活,适合在原地频繁转向和狭小空间的场合下使用;2、结构简单,由于可以通过直接控制电机驱动来完成启动、加速、匀速、减速等动作,省略刹车和离合等装置,使得整车结构设计更为简单。
3、绿色环保,可以作为短途代步工具,用于上下班或者出去购物游玩,可以穿梭与人流密集的闹市区,减少城市道路交通行驶车辆,既可以解决交通堵塞问题,又可以减少碳的排放,做到环保出行。
1.2机械结构本文研制的平衡车高57.8cm,宽41.5cm,两轮直径为8cm。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract
In order to solve the feet-wheeled inverted pendulum’s stability control problem, a control system of a feet-wheeled inverted pendulum based on double closed-loop PID controller combined with particle swarm optimization is proposed. In addition, we designed a cost function related to the control effect to increase the stability of the control system. Under matlab simulation conditions, stable control of the feet-wheeled inverted pendulum was achieved. Experimental results showed that after tuning, the step response of the controller parameters was better than that of the original parameters with the rise time and the settling time was shorter than that of the non-tuning PID controller. This algorithm has been applied to a vertical intelligent search-identify-sampling system based on the area CCD, showing the availability of the PSO-PID controller.
关键词
双足轮式倒立摆,PID,粒子群优化
1. 引言
倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是控制理论发展中的一个典型问题[1]。目 前,通过倒立摆系统验证过的许多控制方法在航天、机器人以及一般工业过程领域均有着广泛的应用。 如航天飞机的姿态控制,机器人行走过程中的平衡控制等,故倒立摆系统控制实验已成为控制理论界学 者研究的热点。倒立摆控制系统是进行控制理论教学及开展各种控制实验的理想实验平台,其作为典型 的非线性、强耦合、多变量控制系统,要求控制系统应当具有良好的稳定性、,鲁棒性以及随动性等性 能[2]。许多学者对倒立摆的控制也提出相应的控制方案,其中较为典型是根据牛顿力学等原理建立倒立 摆的数学模型后实施不同的控制策略的方案,而上述方案的一个普遍特点是需要建立复杂的数学模型, 并且模型都是在忽略空气阻力和摩擦力的前提下建立的,同时控制方案的实施都是依托 PC 机实现,控 制成本较高,不适合倒立摆系统的实际应用控制[3]。为了提高倒立摆控制系统的实用性,同时简化控制 难度和降低控制成本,本文采用双闭环 PID 的控制器及粒子群优化算法的双足轮式倒立摆控制系统,并 设计与控制效果相关的代价函数,以增加控制系统的稳定性,在 matlab 仿真条件下,实现了双足轮式倒 立摆的稳定控制,研究以 MC9S12XS128 单片机为控制器。实现双足轮式倒立摆基于面阵 CCD 的直立 式智能搜索识别采样系统中项目中的应用。 双足倒立摆是在倒立摆的基础上,在其底端安置相互独立、并且能够提供动力的两轮,使倒立摆能 够脱离传统的台式平台结构,只需平整地面即可进行相关的数据实验[4]。这种双足轮式倒立摆工程意义 深远,目前已经有比较完善的双足轮式代步工具,其产品的本质即为此类倒立摆。目前对双足轮式倒立 摆的研究主要集中在控制器设计及平台应用研究上,作为工程产品,常用的 PID 控制器参数在大多数情 况下难以满足需求,因此本文以此为出发点,提出使用粒子群优化算法,整定双子轮式倒立摆的控制器 参数,以期获得更好的控制效果。 在此,本文首先根据双轮倒立摆的物理特性,推导了系统的运动状态方程,然后根据方程特性设计 双闭环 PID 控制器,使用粒子群优化算法,整定双子轮式倒立摆的控制器参数,并将其应用到双轮倒立 摆的 PID 控制器参数整定中。实验结果表明,经过整定的控制器参数较原参数的阶跃响应更好,上升时 间和稳定时间较未整定 PID 控制器的短, 并且本算法已经应用到基于面阵 CCD 的直立式智能搜索识别采
(15)
其中 CL , CR 为电机对左右车轮的转矩。 车体绕 Y 轴:
J δ = Pδ
(HL − HR ) D
(X +X RR
2
(16)
由X = RM
( X RL + X RR )
2 二阶求导得:
X = RM
由= X P X RM + L sin θ P 二阶求导得:
RL
)
2
(17)
2 + L cos θθ = X X P RM P
(18)
由 YP = L cos θ P ,二阶求导得:
28
2 − L sin θ θ = Y − L cos θ Pθ P P P P
采用双闭环 PID 控制及 PSO 算法的双足轮式倒立摆控制系统
(19)
Keywords
Feet-Wheeled Inverted Pendulum, PID, PSO
采用双闭环PID控制及PSO算法的双足轮式倒 立摆控制系统
曲若彤,李聪慧,曲仕茹
西北工业大学,自动化学院,西安
25
采用双闭环 PID 控制及 PSO 算法的双足轮式倒立摆控制系统
Email: qushiru@
Journal of Sensor Technology and Application 传感器技术与应用, 2014, 2, 25-34 Published Online October 2014 in Hans. /journal/jsta /10.12677/jsta.2014.24005
ωp Y
Yp θp 车体
L
车体重心 Xp
左车轮
右车轮
Mp Z
R
X θR1 θR2
D
系统主视图
系统侧视图(从Z轴正向看)
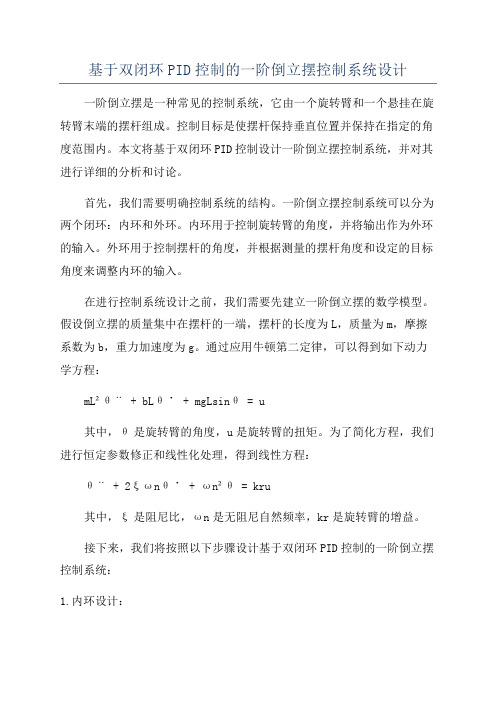
Figure 1. Inverted pendulum system model 图 1. 倒立摆系统模型 Table 1. Parameters list of the System model 表 1. 系统模型参数列表
X RR + X RL = 2 X RM
其中 XRL 和 XRR 为半径为 R 转角为 theta 时的位移,D 为双轮的位移差导致 delta 转角的直径,XRM 为 双轮的位移和,(thetap)为倒立摆和水平面的夹角,L 为的高度。 对系统的组成部分进行受力分析,结合牛顿第二定律,列写如下方程: 左轮沿 X 轴方向:
X RL= R × θ RL X RR= R × θ RR
(1) (2) (3) (4) (5) (6) (7) (8)
X RL − X RR = D ×δ = X P X RM + L sin θ P
X θP L cos θ P + X = P RM
YP = L cos θ P
= −θ L sin θ Y P P P
由 = δ
( X RL − X RR )
D 二阶求导得:
= δ
(X
RL
−X RR
)
D
(20) (21)
VL = VR
其中,H L , H R 分别是左右轮对车体沿 X 方向的作用力;VL , VR 分别是地面对左右车轮的支撑力;H TL , H TR 分别是地面对左右车轮的摩擦力,M 为轮子的质量,J 为转动惯量。 θ , θ 在 θ 接近为 0 时,可以忽略,从而获得系统状态方程如下:
26
采用双闭环 PID 控制及 PSO 算法的双足轮式倒立摆控制系统
样系统项目中(需要具体更改的内容),验证了 PSO-PID 控制器的可用性。
2. 双轮倒立摆建模
倒立摆系统的模型如图 1 所示,在直角坐标系中,小车前进的方向为 X 轴正向,两轮的轴线方向为 Z 轴,垂直于 X-Z 平面的轴为 Y 轴,正方向向上。小车绕 Y 轴的旋转方向符合左手定则,小车摆杆绕 Z 周的转角 θ p 符合左手定则。 如图 1 所示,系统在平面运动具有三个自由度,它们分别是:绕 Z 轴、Y 轴旋转,沿 X 方向移动。 系统模型参数如表 1 所示: 结合瑞士联邦工学院 Aldo D’arrigo 等人[5] [6]对两轮式移动倒立摆的分析,以及牛顿力学方法对系 统进行受力分析,根据力学方程获得双轮移动倒立摆的系统模型,从而获得如下 8 个约束方程。
单位
rad
rad s
= J R J= J RR RL M = M = M RR R RL
δ
δ
kg
m
kg ⋅ m 2
R
J pθ
MP
kg
m m
L D
θP
ωP
J Pδrad来自rad skg ⋅ m
2
θ RL ⋅ θ RR
X RL ⋅ X RR
X RM
rad
m
ms
27
采用双闭环 PID 控制及 PSO 算法的双足轮式倒立摆控制系统
M X HL + HR P = P
(13)
车体沿垂直方向 Y 轴:
M = V + V − M g Y P P L R P
(14)
车体绕通过质心且平行于 Z 轴的轴:
J = (V + V ) L sin θ − ( H + H ) L cos θ − ( C + C ) θ P Pθ L R P L R P L R