动态环境中的规划
动态环境中移动机器人路径规划研究综述

机床与液压
M ACHI NE T OOL & HYDRAUL I CS
J a n . 2 01 3
Vo 1 . 4l No .1
D OI :1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1—3 8 8 1 . 2 0 1 3 . 0 1 . 0 4 4
u n d e r d y n a mi c e n v i r o n me n t i s a c h a l l e n g i n g r e s e a r c h t o p i c i n t h i s i f e l d ,w h i c h h a s ma n y p r o mi s i n g a p p l i c a t i o n s s u c h a s a u t o n o mo u s
Ab s t r a c t :P a t h p l a n n i n g i s o n e o f t h e i mp o r t a n t i f e l d s i n mo b i l e r o b o t t e c h n o l o g y .F u th r e r mo r e ,p a t h p l a n n i n g f o r mo b i l e r o b o t
( C o m p u t e r I n s t i t u t e , H u a q i a o U n i v e r s i t y ,X i a me n F u j i a n 3 6 1 0 2 1 ,C h i n a )
b e h a v i o r a n d l e a r n i n g b a s e d,r a n d o m b a s e d a n d h y b r i d b a s e d a p p r o a c h e s .T he b a s i c t h e o r i e s o f t h e p a t h p l a n n i n g me t h o d s we r e i n t r o —
机器人技术中的动态路径规划算法

机器人技术中的动态路径规划算法机器人技术的快速发展使得其在各个领域得到了广泛应用。
而机器人在执行任务时,路径规划是一个非常重要的问题,特别是在动态环境下。
本文将探讨机器人技术中的动态路径规划算法。
一、引言随着机器人应用领域的扩大,机器人不再只在静态环境下工作,而是需要在动态环境中执行任务。
动态环境中存在障碍物的移动、新障碍物的出现等问题,这给路径规划带来了更大的挑战。
因此,研究并应用动态路径规划算法成为了机器人技术中的一个重要研究方向。
二、动态路径规划算法的基本原理动态路径规划算法旨在使机器人能够在动态环境中找到一条最优路径。
为了实现这一目标,动态路径规划算法通常需要考虑以下几个方面:1. 环境感知:机器人需要实时感知环境的变化,包括移动物体的位置、新障碍物的出现等。
2. 路径更新:根据环境感知结果,路径规划算法需要及时更新机器人的路径,以避开移动物体或新障碍物。
3. 路线优化:在动态环境中,机器人的路径可能需要频繁更新,为了降低计算负载和提高路径的优化程度,需要采用高效的路径优化算法。
三、常用的动态路径规划算法1. 基于模型预测控制的算法模型预测控制算法将机器人的移动视为一个优化问题,以模型预测方法来预测机器人遵循的最优路径。
通过对未来状态的预测,可以避免机器人与动态障碍物的碰撞,并使机器人能够快速适应环境变化。
2. 基于概率图模型的算法概率图模型可以有效地描述机器人的感知信息和环境模型之间的关系,并利用贝叶斯滤波等方法来进行路径规划。
通过将感知信息与环境模型相结合,可以实现对动态环境中的障碍物进行预测和规避。
3. 基于遗传算法的算法遗传算法是一种模拟自然界进化过程的优化算法。
在动态路径规划中,遗传算法可以通过模拟个体的选择、交叉和变异等操作,寻找到适应于动态环境的最优路径。
4. 基于深度学习的算法深度学习在机器人路径规划中的应用逐渐增多。
通过使用神经网络,可以对环境感知数据进行处理和学习,从而实现机器人在动态环境中的路径规划。
动态环境下基于蚁群算法的实时路径规划方法

d n mi n io me t y a c e vr n n
机器人控制中的运动规划算法
机器人控制中的运动规划算法机器人技术的快速发展为各个领域带来了革命性的改变,而机器人的运动控制则是其中至关重要的一环。
在机器人控制中,运动规划算法扮演着关键角色,通过合理的路径规划和轨迹控制,实现机器人的高效运动。
一、引言机器人的运动规划是指确定机器人在特定环境中如何从一个位置移动到另一个位置的过程。
它是机器人控制中的重要环节,影响着机器人在现实世界中进行各种任务的能力和效果。
运动规划算法通过考虑机器人的动力学约束、环境障碍物和轨迹优化等方面,实现机器人运动的高效、安全和可靠。
二、基础运动规划算法1. 离散路径规划离散路径规划是一种常见的运动规划方法,通过将机器人的运动空间划分为网格或节点,并利用搜索算法(如A*算法、Dijkstra算法)在规划空间中搜索路径。
它适用于相对简单的环境和运动情况,但在复杂环境和高速运动中可能效果不佳。
2. 连续路径规划连续路径规划是一种更为精确和实时的运动规划方法。
它通过建立机器人的动力学模型和环境模型,通过求解微分方程或最优化问题,计算出机器人的运动轨迹。
连续路径规划常用的算法包括RRT (Rapidly-exploring Random Tree)、PRM(Probabilistic Roadmap)和OMPL(Open Motion Planning Library)等。
三、高级运动规划算法1. 动态路径规划机器人在动态环境中的运动规划需要实时感知环境变化,并及时更新路径。
动态路径规划算法可以通过传感器的数据和目标变化预测,快速重新规划机器人的运动路径。
常见的动态路径规划算法有D*算法、D* Lite算法等。
2. 优化路径规划优化路径规划旨在通过最小化某个代价函数,得到机器人的最优运动路径。
代价函数可以包括路径长度、运动能耗、时间开销等。
优化路径规划算法常用的方法有A*启发式搜索算法、遗传算法、模拟退火算法等。
四、应用与发展1. 工业领域在工业领域,机器人的运动规划算法广泛应用于自动化生产线、物料搬运和装配等任务。
动态环境中的规划

约束性:环境中的约束条件多,需要合理规划资源分配
实时性:规划需要实时更新,以适应环境变化
规划的流程和方法
制定方案:根据分析结果,制定相应的解决方案
实施方案:将制定的方案付诸实践
评估效果:对实施后的效果进行评估,不断改进和完善
确定目标:明确规划的目的和目标
反馈调整:根据环境变化和执行效果,及时调整决策和行动计划
06
结论与展望
总结动态环境中的规划特点与挑战
特点:适应性、实时性、鲁棒性、自适应性
挑战:不确定性、复杂性、动态性、多目标性
展望未来发展趋势
人工智能技术的不断进步
机器学习算法的优化和改进
深度学习在规划领域的应用
未来规划技术的挑战与机遇
汇报人:
灵活调整目标:根据实际情况,灵活调整规划目标
增强学习能力:通过不断学习和实践,提高规划人员的适应能力
建立反馈机制:及时收集反馈信息,对规划进行持续改进
利用数据和信息进行决策
收集数据:通过传感器、摄像头等设备收集环境数据
分析数据:对收集到的数据进行处理、分析和挖掘
制定决策:根据分析结果,制定相应的决策和行动计划
规划有助于明确目标和方向
单击此处输入你的项正文
规划有助于合理分配资源
单击此处输入你的项正文
规划有助于提高效率和降低成本
单击此处输入你的项正文
规划有助于应对变化和不确定性
单击此处输入你的项正文
动态环境中的规划特点
动态性:环境因素不断变化,需要实时调整规划
不确定性:环境变化难以预测,需要具备应对不确定性的能力
收集信息:收集与规划相关的数据和信息
分析问题:对收集到的信息进行分析,找出问题所在
动态环境下的无人机路径规划与轨迹跟踪算法设计

动态环境下的无人机路径规划与轨迹跟踪算法设计无人机技术的迅猛发展使得无人机在各个领域都有着广泛的应用。
其中,无人机在动态环境下的路径规划与轨迹跟踪算法设计尤为关键。
在动态环境下,无人机需要能够实时感知环境变化,并能根据实时信息做出及时的决策,以保证任务的完成和安全性。
路径规划是无人机行动的基础,从起点到终点的最短路径能有效节约时间和能源消耗。
在动态环境下,路径规划算法需要能够实时更新路径以适应环境的变化。
一种常用的路径规划算法是A*算法,它通过将地图划分为有限个方格,以建立节点图,利用启发式方法找到最短路径。
然而,传统的A*算法无法应对动态环境变化的问题。
为了解决这个问题,研究人员提出了一种改进的A*算法,即增量A*算法。
增量A*算法可以在现有路径的基础上实时地更新路径,以适应动态环境的变化。
该算法通过检测环境的变化,并根据变化为路径添加或删除节点,从而实现路径的实时更新。
通过增量A*算法,无人机可以快速适应环境的变化,并选择最优路径进行飞行。
在路径规划的基础上,轨迹跟踪算法设计将路径规划转化为无人机实际的飞行动作。
在动态环境下,无人机需要能够根据传感器信息实时感知周围的障碍物,并能够做出相应的避障动作。
一个典型的轨迹跟踪算法是PID控制器。
PID控制器通过实时调整无人机的姿态角来实现轨迹控制。
然而,传统的PID控制器存在着对系统参数的依赖性,无法适应动态环境的变化。
为了解决这个问题,研究人员提出了一种改进的控制算法,即自适应控制算法。
自适应控制算法可以通过根据环境的变化自动调整控制器的参数,从而适应环境的变化。
通过自适应控制算法,无人机可以灵活地适应环境的变化,并实现精确的轨迹跟踪。
除了路径规划和轨迹跟踪算法的设计,无人机在动态环境下还需要考虑其他因素,如通信和定位。
通信技术的发展使得无人机可以通过与地面控制中心的通信实现飞行控制。
无人机需要能够实时接收地面控制中心发送的指令,并将自身的状态信息返回给地面控制中心。
可预测动态时空环境的最短时间路径规划

(1./nChina;
2.61206 Troops, Beijing 100000, China; 3.61618 升oops, Beijing 100000, China)
Abstract: The shortest time path planning is an important application of the least cost path planning, as well as a very important research in the GIS field. However, in traditional algorithms, there are only a few studies on the global planning problem in the dynamic environment which is changing with time, such as meteorology, illumina tion, and electromagnetism. To solve this problem, a dynamic spatio-temporal environment influence expression model is established to express the change of dynamic environment in time and space uniformly, and on this basis, the traditional path search algorithm is adopted to carry out the global optimal path planning of minimum cost. Ex perimental results show that in the case of actual occurrence of the predicted dynamic environment, the planning result of the algorithm can reflect the planning influence brought by the change of dynamic environment, and the actual consumption of the planning result is always less than or equal to that of the traditional static programming algorithm, and the calculation amount is equivalent to that of the traditional algorithm. Key words: minimum cost path planning; dynamic environment; space-time model; geographic information sys tem; off-road path planning
《动态环境中的规划》课件

危机管理规划需要结合历史数据和实时信息作 出决策,为突发事件进行妥善处理提供有力的 支持。
结论
未来规划的趋势
动态环境中的规划能够更好地处理变化, 是未来的发展方向。
跨学科、跨领域合作
动态环境中的规划需要政策、技术、社会 科学等多学科的紧密结合,才能更好地解 决实际问题。
ቤተ መጻሕፍቲ ባይዱ
动态环境中的规划
本次课件将向您介绍动态环境规划的概念,挑战和方法,并通过实例展示其 应用。
什么是动态环境?
1 定义
2 特点
动态环境是指随时间和情境变化的环境, 它不断生成新的情境和挑战。
动态环境不同于静态环境,它包含不确 定性,不确定性可能导致规划失败。
为什么需要动态环境中的规划?
1 传统规划的局限性
传统规划忽略了时间和变化,使得规划结果失去参考价值。
2 动态环境中的挑战
动态环境会出现新的需求和变化,需要及时调整规划。
动态环境中的规划方法
预测方法
• 场景分析 • 推演分析
响应方法
• 实时适应 • 灵活调整
动态环境中的规划案例
智慧城市规划
危机应急管理规划
智慧城市规划需要考虑城市的生态、经济和社 会发展,利用新技术探索更好的城市生活方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
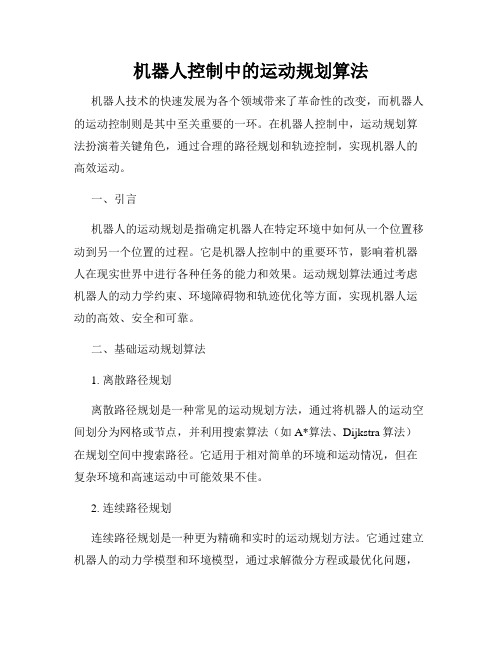
CLOSED={sstart,s2,s1} OPEN={s4,sgoal} 下一个扩展状态:s4
A*搜索:例子
• 计算相关态的最佳g值 ComputePath函数: while (sgoal没有被扩展)
执行慢
4D(x,y,,V)规划
超过2千万个状态 规划慢
执行快
基于高维搜索的规划
6DOF机器人手臂 >3x109个状态
20DOF机器人手臂 >1026个状态
实际规划
• 由于下面原因,需多次再规划
– 环境变化
• 导航时,有人在附近 • 自动驾驶时,有其它车辆在路上
– 环境模型不精确 – 位置估计有误差
A*搜索
• 计算相关态的最佳g值 ComputePath函数: while (sgoal没有被扩展过)
从OPEN中移去f(s)( = g(s)+h(s))最小的s; 把s插入CLOSED; 对s的每个不在CLOSED中的后续态s’
if g(s’)>g(s)+c(s,s’) g(s’)=g(s)+c(s,s’); 把s’ 插入OPEN;
• 在解许多问题时,比A*快得多。
A*的最佳性质
• f(s) = g(s) + h(s)为次序来扩展状态。 • C*为最佳路径的代价,A*搜索:
– 将扩展f(s) < C*的所有结点 – 可能扩展一些f(s) = C*的结点 – 不扩展f(s) > C*的任何结点
• 特例:
– h(s) = 0,f(s) = g(s) UCS搜索,需扩展当前态的所 有后续态
从OPEN中移去f(s)( = g(s)+h(s))最小的s;
把s插入CLOSED; (s)=g(s); 对s的每个不在CLOSED中的后续态s’
if g(s’)>g(s)+c(s,s’) g(s’)=g(s)+c(s,s’); 把s’ 插入OPEN;
注:
• 值是一个状态在其扩展过程中的值。
对s的每个不在CLOSED中的后续态s’ if g(s’)>g(s)+c(s,s’)
g(s2)>g(sstart)+c(sstart,s2)
g(s’)=g(s)+c(s,s’);
把s’ 插入OPEN;
CLOSED={} OPEN={sstart} 下一个扩展状态:sstart
A*搜索:例子
• 计算相关态的最佳g值 ComputePath函数: while (sgoal没有被扩展)
A*搜索
• 计算相关态的最佳g值 主函数: g(sstart)=0;所有其它g值是无穷;OPEN={sstart}; ComputePath(); 给出结果;
ComputePath函数: while (sgoal没有被扩展)
从OPEN中移去f(s)( = g(s)+h(s))最小的s; 扩展s;
注: OPEN是扩展候选态的集。 如果启发方式是一致性的,则每个扩展 态的g(s)都是最佳的。
if g(s’)>g(s)+c(s,s’) g(s’)=g(s)+c(s,s’); 把s’ 插入OPEN;
对每个已扩展状态,g(s)是最佳的。 对每个其它状态,g(s)是一个上限。 现在能计算一个最小代价路径。
加权A*
• 以f(s)= g(s)+h(s)(>1)为次序来扩展状态。 • 亚优:cost(解) cost(最佳解)。
注: CLOSED是已扩展状态的集。 if体中重新给g(s’)赋值,是试图用找到的 从sstart到s的路径来降低g(s’)。
A*搜索:例子
• 计算相关态的最佳g值
ComputePath函数:
while (sgoal没有被扩展) 从OPEN中移去f(s)( = g(s)+h(s))最小的s;
把s插入CLOSED;
CLOSED={sstart,s2,s1,s4,sgoal} OPEN={s3} 结束
A*搜索:例子
• 计算相关态的最佳g值 ComputePath函数: while (sgoal没有被扩展)
从OPEN中移去f(s)( = g(s)+h(s))最小的s; 把s插入CLOSED; 对s的每个不在CLOSED中的后续态s’
A*搜索:例子
• 计算相关态的最佳g值 ComputePath函数: while (sgoal没有被扩展)
从OPEN中移去f(s)( = g(s)+h(s))最小的s; 把s插入CLOSED; 对s的每个不在CLOSED中的后续态s’
if g(s’)>g(s)+c(s,s’) g(s’)=g(s)+c(s,s’); 把s’ 插入OPEN;
动态环境中的规划
路径规划
概要
• 规划经常是一个重复过程,且要求快速。
– 动态环境 – 不精确的初始模型 – 真体位置有误差
• 基于A*的规划器类型:
– ARA*
• 随时A*搜索 • 输出 亚优解 • 能在有时间约束下使用
– D*与D*精简版
• 递增A*搜索 • 通过复用前次搜索结果来计算最佳解 • 常常能显著加速重复规划
– 结合上述两者的优点。
搜索最小代价路径
• 计算相关态的g值
– g(s):一条从sstart到s最小代价路径的代价估值。 – 最佳值满足: g(s)=mins”pred(s)(g(s”)+c(s”,s))
由s3到sgoal边的 代价c(s3,sgoal)
搜索最小代价路径
• 最小代价路经是由回溯(backtracking)获 得的一条的贪婪路径
CLOSED={s4} OPEN={sgoal,s3} 下一个扩展状态:sgoal
示例:复用A*( =1)
CLOSED={s4,sgoal} OPEN={s3} 结束
现在能够计算一个最小代 当ComputePath终止后:
价路径
所有状态的g值都等于最终A*的g值
回到实例
• 执行一系列降低的加权A*搜索:
A*搜索:例子
• 计算相关态的最佳g值 ComputePath函数: while (sgoal没有被扩展)
从OPEN中移去f(s)( = g(s)+h(s))最小的s; 把s插入CLOSED; 对s的每个不在CLOSED中的后续态s’
if g(s’)>g(s)+c(s,s’) g(s’)=g(s)+c(s,s’); 把s’ 插入OPEN;
(s)=g(s) (即一致性)。
• 初始化OPEN时,使用上次搜索结果。
示例:复用A*( =1)
CLOSED={} OPEN={s4,sgoal} 下一个扩展状态:s4
g(s’)=mins”pred(s’)(v(s”)+c(s”,s’)) 初始的OPEN包含所有不一致性的状态
示例:复用A*( =1)
– h(s) = h*(s),f(s) = g(s) + h*(s),只扩展当前态的最佳 后续态
加权A*:示例
A*
11,054次扩展 代价=168,204
=10的加权A*
1,138次扩展 代价=177,876
构建随时搜索
• 执行一系列降低的加权A*搜索: 置为大值; while 1,并且仍留有时间来规划
– 随时D*(AD*)
• 随时递增A*搜索 • 输出 亚优解 • 能在有时间约束下使用 • 常常能显著加速重复规划
– 所有都基于ComputePathWithReuse函数
动态环境中的自动真体
ATRV机器人 Segbot机器人
2D地图 3D地图
规划(Planning)
• 规划
– 利用一个问题的结构来构造一个到达目的行动 计划
• 需快速再规划
实际规划
• 由于下面原因,需多次再规划
– 环境变化
• 导航时,有人在附近 • 自动驾驶时,有其它车辆在路上
– 环境模型不精确 – 位置估计有误差
• 需快速再规划!
用随时D*(即随时动态A*)来做4D规划
实际规划
用随时D*(即随 时动态A*)来做 4D规划
用随时D*(即随时动态A*)来做3D停车规划
• g(s’)=mins”pred(s’)(v(s”)+c(s”,s’)) • OPEN:一个(s)>g(s)(即不一致性)状态的集,其它所有状态有
(s)=g(s) (即一致性)。
复用加权A*搜索
用所有的不一致性的状态来初值化OPEN;
ComputePathWithReuse函数:
while (sgoal没有被扩展)
CLOSED={sstart,s2} OPEN={s1,s4} 下一个扩展状态:s1
A*搜索:例子
• 计算相关态的最佳g值 ComputePath函数: while (sgoal没有被扩展)
从OPEN中移去f(s)( = g(s)+h(s))最小的s; 把s插入CLOSED; 对s的每个不在CLOSED中的后续态s’
实际规划
• 随时规划算法,例如, A*的随时复用版,即 ARA*
– 快速找到第一个可能的亚优解,然后用其余时间来改 进它。
– 允许满足时间约束。
• 再规划算法,例如, A*递增版,也即D*与D*精简 版
– 复用以前规划来加速再规划 – 很适合于动态和/或部分已知的环境。
• 随时再规划算法,例如,随时递增A*,即随时D*
=2.5
=1.5
=1.0
13次扩展,解=11次移动 15次扩展,解=11次移动 20次扩展,解=10次移动