solidangle 立体角计算
立体角理解及应用
立体角在国家法定计量单位所采用的国际单位制(SI)中,除了7个基本单位外,还有两个辅助单位,一个是平面角(一般简称角度),一般记为希腊小写字母α等,单位为弧度,记为rad,另一个是立体角,记为大写希腊字母Ω,单位为球面度,记为sr。
立体角涉及光度学、电磁辐射、球面天文学等许多领域的基本概念,如(热、光或其它电磁波、声音或其它机械波的)辐射通量、星座所占天球区域的“面积”(实际为立体角)大小等等,因此立体角概念本身的重要意义和实用价值不言而喻,可谓理解客观世界的空间形式和许多科学原理的一把钥匙。
通常的初等数学教育对平面角讲得很详尽,但对立体角的介绍则远不充足。
对三维空间、立体几何有兴趣者,不妨读读本文,希望您有所获益。
您斧正拙文之谬误、拓展和深化拙文所涵盖的内容,尤为笔者所企冀。
平面上,多边形内角和可表为(n-2)π,那么相应地,多面体内立体角之和如何?答曰:它在一定区间内变化,关于这一点,以后再展开叙述。
1、立体角定义与量度1.1立体角的概念当我们看到远处的两个物体,欲表达其相对方位时,用从这两个物体到眼睛的视线之间的夹角这个概念。
例如,可以选择月亮的上边缘顶点与下边缘顶点,由人眼到这两个点的视线之间的夹角较为稳定,可以称为月亮的“视直径”。
而当形容“挂在树梢上的月亮像月饼这么大”时,人们就一面犯了错误,一面已经在冥冥之中与立体角概念的幽灵相接近。
月亮、月饼当然不一样大,而且大小相差悬殊,但是当月饼与人眼之间为一定距离时,看起来它的确跟月亮“差不多一般大”。
月饼比月亮小得多,但当把月饼放在眼前时,它却能完全挡住月亮,这样就清楚了,随着距离变远,形象就变小。
这不仅是“视直径”的变化,其实也是另一个量,“立体角”的变化。
假设制作一个代表立体直角坐标系的三维“十字架”,使之穿过两个半径相差一倍的同心球面,球心在坐标系原点,自球心发出无数条射线,这些射线在球面上的投影点形成一条连续的闭合的曲线,那么这样的一条曲线在小球面上所限定的面积为在大球面上所限定面积的1/4。
多维空间的立体角
多维空间的立体角立体角的概念在几何学、电动力学、光学、天文学等领域应用十分广泛。
本文从二维空间的平面角开始对n 维空间的立体角进行探讨。
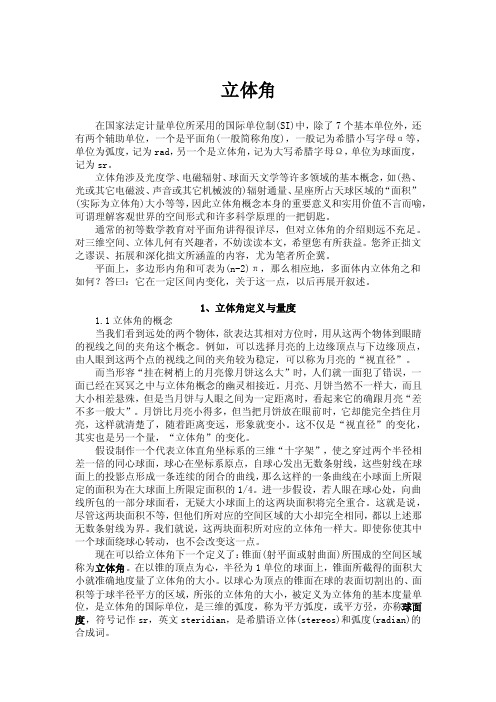
1. 平面角我们先来分析平面角的单位元,如图所示,单位元dφ可以表示为:dφ=CD ̂r其中,CD̂的长度近似为CD ̂,设C →D 的任意曲线微元(即为直线微元)为dl ,dl 与半径r 的夹角为θ,则:CD̂=dl ∙sin θ 对上述微元进行积分,则从A 到B 的曲线对应的角为:φ=∫dlrBAsin θ 设dl 的法线方向的单位向量为e 0,设e 0与r 的夹角为ψ则:ψ=π2−θφ=∫dl r B A cos ψ=∫e 0dl ∙rr B A2. 立体角对于三维空间的立体角,通常将某一曲面投影至球面,计算其与半径平方的商的曲面积分。
设曲面的面积微元为dS(其大小代表曲面大小,方向为外法线方向);设r为观测点指向面积微元的向量,则dS在以r为半径的球上的投影面积为:dS⊥=dS∙r r立体角微元dΩ为:dΩ=dS∙r r3曲面对空间的立体角为:Ω=∫dS∙r r3S不难得到,全空间的立体角Ω=4π下面再给出几个特殊空间图形所张的立体角计算公式及值:顶角为2θ的圆锥:Ω=2π(1−cosθ)半球:2π球面三角形:A+B+C−π四面体:对于任意四面体OABC,设α=∠BOC,β=∠AOC,γ=∠AOB,θ=12(α+β+γ),则:tan Ω4=√tanθ2tanθ−α2tanθ−β2tanθ−γ2正方体的一个顶角的立体角为π2,正四面体的一个顶角为arctan 10√223(或者arccos 2327)3. n 维空间的立体角设n 维立体角Ω的顶点位于n 维球的球心,设n 维球的表面积为S ,半径为R ,则:Ω(n )=S(n)R n−1则问题的关键在于求出n 维球体的表面积: 由Gauss 公式:∫∇∙r dV V=∮r ∙dS ðV由于r 代表n 维球径向矢量,设:r =x 1i 1+x 2i 2+x 3i 3+⋯+x n i n则:∇∙r =nr ∙dS =x 12+x 22+⋯x n2R=R故:nV (n )=RS(n) S (n )=nRV(n) 通过换元易得:V (n )=R n β(n)其中,β(n)为单位球体的体积:β(n )=∫dx 1dx 2⋯dx n V n 0V n 0:x 12+x 22+⋯+x n 2≤1β(n )=∫dx n 1−1∫dx 1dx 2⋯dx n−1V n−1V n−1: x 12+x 22+⋯+x n−12≤1−x n 2故:V n−1=βn−1∙(1−x n 2)n−12βn =βn−1∫(1−x 2)n−12dx1−1=2βn−1∫(1−x 2)n−12dx 1换元,令x =cos tβn =2βn−1∫sin n t dt π2=√πβn−1Γ(n +12)Γ(n 2+1)由于β1=2,可得:βn =πn2Γ(n 2+1)最终可得:V (n )=R nπn 2Γ(n2+1) S (n )=nR n−1πn 2Γ(n2+1) Ω(n )=n nπn 2Γ(n2+1)列表如下:图像如下:附源代码:n=1:10;V=n.*pi.^(n/2)./gamma(1+n/2); plot(n,V,'black+');xlabel('n')ylabel('\Omega(n)')title('空间维数与立体角')。
Solid_Angle 立体角计算
or simply
ω = A / R 2 … for an area on a sphere.
A
P
.
R
Figure 5.
Subtense of an area on a sphere at its center.
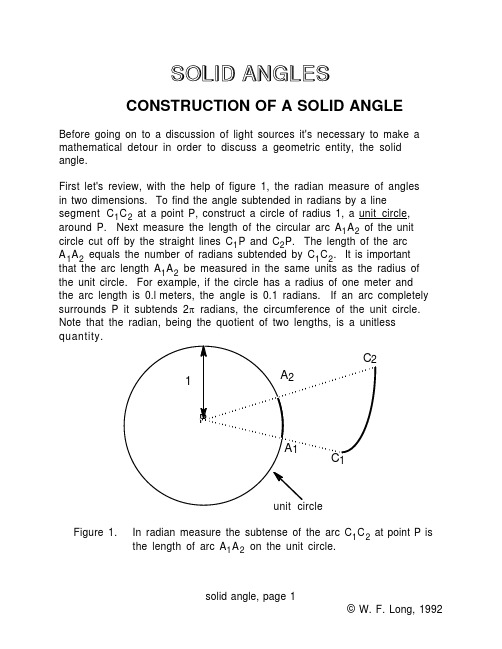
Now let's go to the three dimensional case. Consider a point P and a surface of area A somewhere in space. We want a measure of the subtense of the area at P. Taking our cue from the two dimensional case, construct a unit sphere, a sphere of radius 1, around P. The subtense of A is measured by the area it cuts out of the unit sphere, as illustrated in figure 2. This is the area which would be cut out by lines drawn from P to every point on the periphery of A . This area is the solid angle subtended by A . The unit of measurement of the solid angle is the steradian, abbreviated str, the three dimensional analog of the radian. For example, if the unit sphere has a one meter radius and A cuts out an area of 6 m2 on the unit sphere, A subtends a solid angle of 6 steradians. The usual symbol for solid angle is ω .
立体角Solid Angle
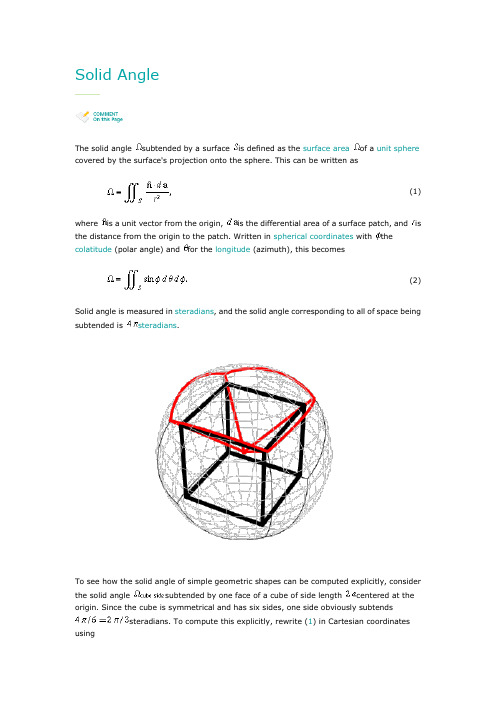
Solid AngleThe solid angle subtended by a surface is defined as the surface area of a unit sphere covered by the surface's projection onto the sphere. This can be written as(1)where is a unit vector from the origin,is the differential area of a surface patch, and isthe distance from the origin to the patch. Written in spherical coordinates with thecolatitude (polar angle) and for the longitude (azimuth), this becomes(2)Solid angle is measured in steradians , and the solid angle corresponding to all of space beingsubtended issteradians .To see how the solid angle of simple geometric shapes can be computed explicitly, considerthe solid anglesubtended by one face of a cube of side lengthcentered at theorigin. Since the cube is symmetrical and has six sides, one side obviously subtendssteradians. To compute this explicitly, rewrite (1) in Cartesian coordinatesusing(3)(4)and(5)(6)Considering the top face of the cube, which is located at and has sides parallel the -and -axes,(7)(8)as expected.Similarly, consider a tetrahedron with side lengths with origin at the centroid, base at(where is the centroid), and bottom vertices atand, where(9)(10)(11)Then runs from to , and for the half of the base in the positive half-plane, can betaken to run from 0 to , giving(12)(13)i.e., , as expected.。
立体角计算公式
立体角计算公式立体角,又称夹角、内角、拱角,是指在立体空间内三条曲线汇合成的一种特殊的角,它体现了空间几何学的概念。
它的计算通常使用三角函数和立体几何的相关参数。
立体角的计算都是围绕着一个拱角内三个平面之间的夹角来完成的。
基本计算公式二维平面立体角的计算公式如下:夹角=sin-1[(b x c)/(|b||c|)]其中,b和c是向量,|b|和|c|分别是b和c的模长,x表示叉乘。
三维平面立体角的计算公式如下:夹角=cos-1[(a x b)c/(|a||b||c|)]其中,a、b和c是向量,|a|、|b|和|c|分别是a、b和c的模长,x和表示叉乘和点乘。
立体几何计算公式立体几何的计算公式可以用来表示立体角的特性,以此来计算夹角的大小。
1.体积公式:V=abc其中,a、b和c是三条曲线汇合处的长度或边长,V表示立体角的体积。
2.表面积公式:S=ab+bc+ca其中,a、b和c是三条曲线汇合处的长度或边长,S表示立体角的表面积。
3.距离公式:D=√(a+b+c)其中,a、b和c是三条曲线汇合处的长度或边长,D表示立体角的距离。
4.角平分公式:α/β/γ=a/b/c其中,α、β和γ是各角的大小,a、b和c是三条曲线汇合处的长度或边长。
5.体积中垂线公式:V=abc sin其中,V表示立体角的体积,a、b和c是三条曲线汇合处的长度或边长,α表示立体角的内角大小。
立体角的应用立体角计算公式广泛应用于几何学、机械工程、电子学等领域,它可以用来计算空间坐标系的定位,构建复杂的几何体,也可用来测量空间距离、角度、体积等。
比如,在机械结构设计中,立体角的计算公式可以用来计算连接的螺栓的角度、位置和大小,为准备安装和维护机械设备提供依据。
在电子工程中,立体角的计算公式也可以用来计算电子元件之间的位置、距离和角度,这些参数对正确构建电子系统非常重要。
总结立体角是一种有三条曲线汇合而成的特殊角,它体现了空间几何学的概念。
光学单位sr-概述说明以及解释

光学单位sr-概述说明以及解释1.引言1.1 概述概述部分的内容可以从以下几个方面进行展开:光学单位sr(Steradian)是国际单位制中用于描述空间角的单位。
空间角是指立体角,用来衡量来自某个点源的辐射或光线在空间中的分布。
sr是国际单位制中的基本单位,它的定义基于二维球面部分。
当位于球心的点源发出的光线或辐射在距离球心1米处的球面上的投影面积为1平方米时,所对应的立体角为1sr。
换句话说,1sr的立体角涵盖了球面上的单位面积。
与平面角不同,立体角不仅考虑了光线或辐射的分布角度,还考虑了其在空间中的传播范围。
通过引入光学单位sr,我们可以更准确地描述和计算光线的辐射强度或光通量以及接收器的感知范围。
光学单位sr在许多领域中都有广泛的应用,特别是在光学、光电子学和辐射传输领域。
例如,在照明工程中,我们可以使用sr来描述灯具的光束角度,以确定其辐射范围和照明强度分布。
在摄影和摄像领域,sr可以被用来衡量镜头的视角和视野范围。
在激光工程中,sr可以用来描述激光束的扩散角度和光束发散性能。
总之,光学单位sr是国际单位制中用于描述空间角的重要单位。
通过使用sr,我们可以更准确地描述和计算光线的辐射强度和分布,从而在光学应用和相关领域中提供更精确和可靠的计量基础。
1.2 文章结构文章结构:本文旨在介绍光学单位sr的相关知识。
文章分为引言、正文和结论三个部分。
在引言部分,我们将对本文的主题进行概述,说明本文介绍的是什么,以及为什么选择这个主题进行研究。
同时,我们还将介绍文章的结构和目的,以便读者能够更好地理解和阅读本文。
在正文部分,我们将展开论述,分为两个要点进行介绍。
第一个要点中,我们将详细介绍光学单位sr的定义、起源和应用领域。
我们将从历史角度出发,追溯光学单位sr的提出和发展过程,以及在光学研究中的重要意义。
同时,我们也将介绍在不同领域中如何使用光学单位sr进行测量和计算,以及其在实际应用中的优势和局限性。
光强中什么是立体角及它的计算公式

摘要:本文应用数学工具,推导出灯具在两个相互垂直方向上的发光角同立体角之间的关系。 关键词:立体角,发光角。 0 引言 光强度是照明工程中的一个重要术语,其定义是“光源在给定方向的单位立体角中发射的光通量”, 一般以 I 表示。若在某微小立体角 dΩ内的光通量为 dΦ(ψ,θ),则该方向上的光强为: I(ψ,θ)=dΦ(ψ,θ)/dΩ。 式中,dΩ的单位为 sr(球面度),光强的单位为 cd(坎德拉,烛光)。 1 cd=1 lm/sr。 但关于立体角的计算方法,照明教材及各类文献中却没有述及。这给从事照明工程的专业技术人员 带来很大的困惑。
1
∂x ∂y
1− x2 − y2
(3) (4) (5)
代入(1)式得:
∫∫ A=
dxdy
D 1− x2 − y2
(6)
利用极坐标,得:
rdrdθ
∫∫ A=
D 1− r2
(7)
易知,积分区域在 xy 平面上的投影是由两条椭圆曲线围成,方程分别为:
x 2 +y2=1
(8)
sin 2 α
x2 + y2 =1
参考文献 ⑴周太明等,电气照明设计,复旦大学出版社,2001,11 ⑵同济大学数学教研室,高等数学,高等教育出版社,1998,12 ⑶陈大华等译,光源与照明(第四版),复旦大学出版社,2000,1
注:本文发表于《中国照明学会(2005)学术年会论文集》,2005.9·上海
150° 0.506 1.011 1.515 2.016 2.514 3.008 3.492 3.964 4.411 4.811
165° 0.519 1.038 1.557 2.075 2.592 3.108 3.621 4.130 4.632 5.115 5.544
工程热力学与传热学第17章
C C0 AC0 为灰体的辐射系数
T 2 C W /m 100
任何物体的辐射力恒小于同温度下黑体的辐射力。
第三节 物体间的辐射换热
一、黑体间的辐射换热
角系数(angle factor) :表面1发射的辐射能落在表面2上的 百分数,用X1,2表示, X1,2称为表面1对表面2的角系数。 X2,1称为表面2对表面1角系数。 1、2两表面间的辐射换热量Q1,2为
第十七章
辐射换热
本章要点:1。着重掌握热辐射的基本概念 2。着重掌握角系数的基本概念 2。着重掌握热辐射的基本定律 3。着重掌握辐射换热相关分析与基本计算 本章难点:热辐射的基本概念和基本定律的理解和消化
本章主要内容: 第一节 热辐射的基本概念 第二节 热辐射的基本定律 第三节 物体间的辐射换热 第四节 太阳辐射
微波炉是利用远红外线来加热物体的。远红外线可以 穿透塑料、玻璃及陶瓷制品,但却会被像水那样具有极性 分子的物体吸收,在物体内部产生内热源,从而使物体比 较均匀地得到加热。各类食品中的主要成分是水,因而远 红外线加热是一种比较理想的加热手段。
二. 物体的吸收率、反射率和穿透率
当热辐射的能量投射到物体表面上时,和可见光一样, 也发生吸收、反射和穿透现象。如图在外界投射到物体表 Q Q 面上的总能量Q中,一部分 被物体吸收,另一部分 被 Q 物体反射,其余部分 穿透过物体。按照能量守恒定律有 如图7-2所示。
dQ0,dA I 0 dA cosd
0
2
I 0 dA
2
0
d sin cosd
0
2
I 0 dA
E0
dQ0,dA dA
I 0
黑体辐射力等于其定向辐射强度I0的倍。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
dω =(cosφ/r2)dA . (1)
To find the solid angle subtended by a surface of finite size we have to integrate (1), obtaining
ω=∫dω=∫(cosφ/r2)dA.
AA
We'll perform the integral for three cases.
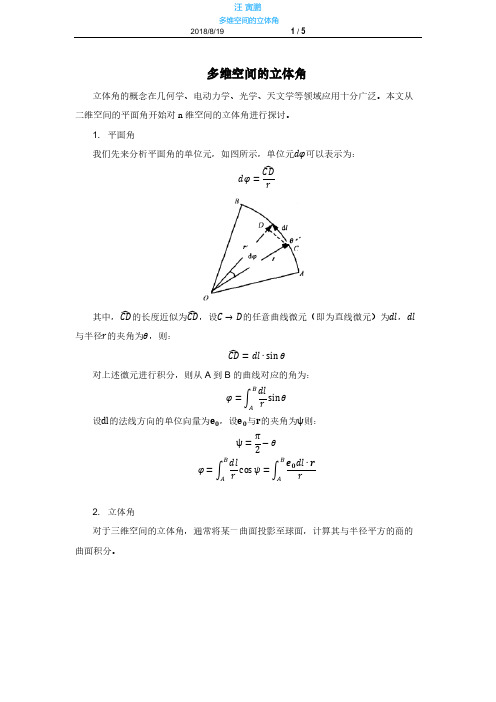
the arc length is 0.l meters, the angle is 0.1 radians. If an arc completely
surrounds P it subtends 2π radians, the circumference of the unit circle.
Note that the radian, being the quotient of two lengths, is a unitless
quantity.
C2
1
A2
P A1 C1
unit circle
Figure 1. In radian measure the subtense of the arc C1C2 at point P is the length of arc A1A2 on the unit circle.
solid angle, page 1
ω=∫dω=∫(cosφ/r2)dA=(cosφ/r2)∫dA
or
ω=Acosφ/r2 … for a small area.
solid angle, page 4
© W. F. Long, 1992
Another important case is the angle subtended by an area on a sphere of radius R at the center of the sphere (figure 5). In this case φ=0 for any point on the surface and r equals the radius of the sphere for any point on the surface, hence the integral reduces to
SOLID ANGLES
CONSTRUCTION OF A SOLID ANGLE
Before going on to a discussion of light sources it's necessary to make a mathematical detour in order to discuss a geometric entity, the solid angle.
Let's calculate the solid angle dω subtended by an infinitesimal area dA at a point P. Since the area is infinitesimal, all points on A are essentially equidistant from P. Designate the distance from P to dA by r. Because the surface is so small, it may be considered essentially flat and a single angle will suffice to specify the orientation of dA. Let that angle be φ, the angle between the normal to the surface and the line connecting the surface and point P. This situation is shown in figure 3. First let's project dA onto the sphere of radius r centered at P. The area of that projection is cosφdA≡dW.
First let's review, with the help of figure 1, the radian measure of angles
in two dimensions. To find the angle subtended in radians by a line
segment C1C2 at a point P, construct a circle of radius 1, a unit circle, around P. Next measure the length of the circular arc A1A2 of the unit circle cut off by the straight lines C1P and C2P. The length of the arc A1A2 equals the number of radians subtended by C1C2. It is important that the arc length A1A2 be measured in the same units as the radius of the unit circle. For example, if the circle has a radius of one meter and
© W. FOLID ANGLE
r
dA
dω
φ
P
σ
1
s
dW
Figure 3. An infinitesimal area dA subtends an angle dω at point P. (The scale is much exaggerated!)
© W. F. Long, 1992
a α P
R
Figure 6. A disk of radius a subtending half angle α at a point P.
The final, and most complex case is that of the solid angle subtended by a disk at a point P on its axis, as shown in figure 6.
dW /dω =s2/σ2 .
Looking at similar triangles in figure 3 in the plane containing r we arrive at
solid angle, page 3
© W. F. Long, 1992
the ratio,
s/σ=r/ 1
a ρ
ρ+dρ
α P
R r
Figure 7. To calculate the subtense of a disk at point P, break the disk up into infinitesimally thin rings.
To apply (1), first break the circle up into a series of concentric ring shaped areas as in figure 7. The inside radius of each of these areas is ρ and the outside radius is (ρ+dρ) so that the area of each ring is
© W. F. Long, 1992
Now let's go to the three dimensional case. Consider a point P and a surface of area A somewhere in space. We want a measure of the subtense of the area at P. Taking our cue from the two dimensional case, construct a unit sphere, a sphere of radius 1, around P. The subtense of A is measured by the area it cuts out of the unit sphere, as illustrated in figure 2. This is the area which would be cut out by lines drawn from P to every point on the periphery of A. This area is the solid angle subtended by A. The unit of measurement of the solid angle is the steradian, abbreviated str, the three dimensional analog of the radian. For example,
φ A
r P
Figure 4. Subtense of a small area at a point.
The first case is that of a small, flat area with linear dimensions<<r. In this case the distance from P to any part of the area is about the same so r is effectively constant over the area. Likewise φ is effectively constant over the area, so