《ansys讲义》PPT课件
合集下载
ANSYS培训ppt课件

对线弹性材料特性, 可指定各向同性或正交各向异性特性 (EX, EY, EZ 等)
Hill 准则不描述强化; 它仅描述屈服准则。Hill 势与等向、随动和混
合强化模型相结合。
在这些模型中, von Mises 用作 ‘参照’ 屈服应力。Hill 模型则用来确定六个
方向的实际屈服应力值。
s3
粘塑性 :高温金属 蠕变:数十种蠕变模型,显式&隐式,
与弹塑性联合使用 非线性弹性 粘弹性:玻璃类、塑料类材料 超弹性:各种橡胶类、泡沫类材料 膨胀:核材料 混凝土材料 ……
弹性回顾: • 讨论塑性之前,先回顾一下金属的弹性。
– 弹性响应中,如果产生的应力低于材料的屈服点,卸 载时材料可完全恢复到原来的形状。
3
1 2 3
1
从轴 1=2=3 的角度看,von Mises 屈服准则如下所示。
s3
s
塑性 弹性
s1
主应力空间
sy
e
s2 单轴应力-应变
15
缺省时,所有的率无关塑性模型采用 von Mises 屈服准则,除非另外说明。
双线性等向强化 (BISO) 多线性等向强化 (MISO) 非线性等向强化 (NLISO) 双线性随动强化 (BKIN) 多线性随动强化 (KINH & MKIN) Chaboche 非线性随动强化 (CHAB)
规定屈服面的修正:
后继屈服面
– 随动 强化。
2
• 屈服面大小保持不变, 并
初始屈服面
沿屈服方向平移。
1
– 等向 强化。
后继屈服面
• 屈服面随塑性流动在所有方 2 向均匀膨胀。
初始屈服面
ansys课件第一章

弹性力学偏微分方程数值求解方法: (1)差分法 (2)有限元法。有限元法适用于任意形状、剖分网 格可随解的分布而变化,得到的求解方程正定对称, 比差分法更优越。 1.2 应力 应力:描述物体内部间互相作用大小的物理量,通 常用物体内微小长方体受力状态描述。 dydz xx , yy , zz 表示微小长方体拉压变形正应力,
注意: 1 2 3, 1, 2, 3带符号 主应力为应力张量的特征值,即为方程 xx xy xz det I yx yy yz 0的根, zx zy zz I 为单位矩阵 (2)第一强度理论 最大主应力小于许应力强度: 1 [ ]
((
i
ij
)V j f jV j )h dxdydz 0, 下标h表示某一小块区域。
((
i
ij
)V j ) h dxdydz i ( ijV j ) h dxdydz ( ij iV j ) h dxdydz
( V )
i ij
j h
dxdydz ( ijV j ) h dSi
dS x dydz , dS y dxdz , dS z dxdy , 记(dS x , dS y , dS z ) dS , 表示面积向量
高数的面积 分转体积分 定理
将所有小区域(h)的积分相加,因面上的积分
2 12 2 32 2 ( 1 2 2 3 3 1 ) [ ]
1.7 弹性力学的变形偏微分方程:
xi yi zi fi 0(i x, y, z ) x y z 将应变与应力的关系代入,可得: divU u x ( ) fx 0 x divU u y ( ) fy 0 y divU u z ( ) fz 0 z 2 2 2 u x u y u z 其中 2 2 2 ,divU x y z x y z
《ANSYS教程》课件

2000年代
推出ANSYS Workbench,实 现多物理场耦合分析。
1970年代
ANSYS公司成立,开始开发有 限元分析(FEA)软件。
1990年代
扩展软件功能,增加流体动力 学、电磁场等分析模块。
2010年代
持续更新和优化,加强与CAD 软件的集成,提高计算效率和 精度。
软件应用领域
航空航天
2023
PART 07
后处理与可视化
REPORTING
结果查看与图表生成
结果查看
通过后处理,用户可以查看分析结果,如应力、应变、位移等。
图表生成
根据分析结果,可以生成各种类型的图表,如柱状图、曲线图、等值线图等,以便更直观地展示结果 。
可视化技术
云图显示
通过云图显示,可以清晰地展示模型 的应力、应变分布情况。
压力载荷等。
在设置边界条件和载荷 时,需要考虑实际工况 和模型简化情况,确保 分析的准确性和可靠性
。
求解和后处理
求解是ANSYS分析的核心步骤,通过求解可以得到模型在给定边界条件和 载荷下的响应。
ANSYS提供了多种求解器,如稀疏矩阵求解器、共轭梯度求解器等,可以 根据需要进行选择。
后处理是分析完成后对结果的查看和处理,ANSYS提供了丰富的后处理功 能,如云图显示、动画显示等。
VS
详细描述
非线性分析需要使用更复杂的模型和算法 ,以模拟结构的非线性行为。通过非线性 分析,可以更准确地预测结构的极限载荷 和失效模式,对于评估结构的可靠性和安 全性非常重要。
2023
PART 04
流体动力学分析
REPORTING
流体静力学分析
静力学分析用于研究流体在静 止或准静止状态下的压力、应
Ansys-Workbench详解教程ppt课件

局部细化: 支撑处、载荷施加位置、应力变化较大的地方。
ppt课件.
33
网格控制
具体操作:选中结构树的Mesh项,点击鼠标右键,选择Insert,弹出 对网格进行控制的各分项,一般只需设置网格的形式(Method)和单元的 大小(Sizing)。
其余一些网格控制项的意义:
Refinement—细化网格 Mapped Face Meshing—映射网格;
定义
真实系统
ppt课件.
有限元模型
4
节点和单元
载荷
节点: 空间中的坐标位置,具有一定自由度和 存在相互物理作用。
单元: 一组节点自由度间相互作用的数值、矩阵 描述(称为刚度或系数矩阵)。单元有线、面或实 体以及二维或三维的单元等种类。
约束
有限元模型由一些简单形状的单元组成,单元之间通过 节点连接,并承受一定载荷。
与单选的方法类似,只需选择Box Select,再在图形窗口中按住 左键、画矩形框进行选取。 3、在结构树中的Geometry分支中进行选择。
屏幕下方的状态条中将显示被选择的目标的信息。
ppt课件.
22
显示/隐藏目标
1、隐藏目标
在图形窗口的模型上选择一个目标,单击鼠标右键,在弹出的选
项里选择
,该目标即被隐藏。用户还可以在结构树中选取一
操作界面的显示 工具条的显示 选择目标 显示/隐藏 旋转、平移、缩放
ppt课件.
18
创建、打开、保存文档
File菜单或者工具条的 1、创建一个新文档。选择File—New命令。 2、 打开文档。选择File—Open命令。 3、保存文档。选择File—Save或Save As命令,
一般保存为.dsdb格式的文档。
ppt课件.
33
网格控制
具体操作:选中结构树的Mesh项,点击鼠标右键,选择Insert,弹出 对网格进行控制的各分项,一般只需设置网格的形式(Method)和单元的 大小(Sizing)。
其余一些网格控制项的意义:
Refinement—细化网格 Mapped Face Meshing—映射网格;
定义
真实系统
ppt课件.
有限元模型
4
节点和单元
载荷
节点: 空间中的坐标位置,具有一定自由度和 存在相互物理作用。
单元: 一组节点自由度间相互作用的数值、矩阵 描述(称为刚度或系数矩阵)。单元有线、面或实 体以及二维或三维的单元等种类。
约束
有限元模型由一些简单形状的单元组成,单元之间通过 节点连接,并承受一定载荷。
与单选的方法类似,只需选择Box Select,再在图形窗口中按住 左键、画矩形框进行选取。 3、在结构树中的Geometry分支中进行选择。
屏幕下方的状态条中将显示被选择的目标的信息。
ppt课件.
22
显示/隐藏目标
1、隐藏目标
在图形窗口的模型上选择一个目标,单击鼠标右键,在弹出的选
项里选择
,该目标即被隐藏。用户还可以在结构树中选取一
操作界面的显示 工具条的显示 选择目标 显示/隐藏 旋转、平移、缩放
ppt课件.
18
创建、打开、保存文档
File菜单或者工具条的 1、创建一个新文档。选择File—New命令。 2、 打开文档。选择File—Open命令。 3、保存文档。选择File—Save或Save As命令,
一般保存为.dsdb格式的文档。
ANSYS基础培训PPT课件
培训手册
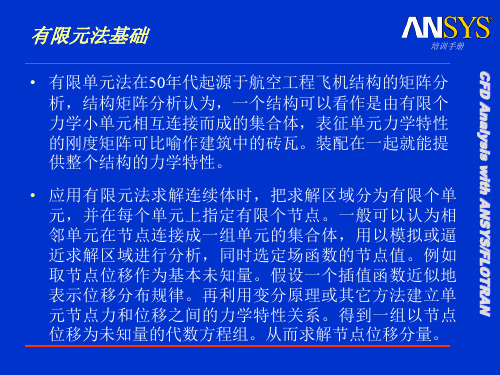
CFD Analysis with ANSYS/FLOTRAN
CFD Analysis with ANSYS/FLOTRAN
培训手册
• 流动准则 • 屈服准则 • 强化准则
材料非线性
单元非线性
• 接触 – 点----点 – 点----线 – 点----面 – 面----面 – 刚----柔 – 柔----柔
{σ}=[D][B]{δ}e
{σ}—单元内任一点的应力矩阵
[D]—与单元材料有关的弹性矩阵
利用变分原理,建立作用于单元上的节点力和位
移之间的关系式
{F}e=[K]e{δ}e
培训手册
CFD Analysis with ANSYS/FLOTRAN
CFD Analysis with ANSYS/FLOTRAN
实体几何模型载荷
培训手册
CFD Analysis with ANSYS/FLOTRAN
优点 缺点
改变网格不影响载荷 涉及到的加载实体少
生成的单元在当前激活的单元座标下,节 点为总体直角座标,因此实体与有限元模 型可能有不同座标系统和载荷方向 实体载荷在凝聚分析中不方便,因载荷加 在主自由度上施加关键点约束较繁锁 不能显示所有实体载荷
简例(续)
培训手册
CFD Analysis with ANSYS/FLOTRAN
下面以小变形弹性静力问题为例,加以详细介绍。 几何方程:eij=1/2(ui,j+uj,i) 物理方程:sij=aijklekl 平衡方程:sij,j+fi=0 边界条件:
位移已知边界条件 ui=ui (在边界Гu上位移已知) 外力已知边界条件 sij,j+pi=0(在边界Гp上外力已知)
第3章Ansys入门ppt课件
• 右键 在拾取和取消之间切换。
应用 拾取和取消的切换
光标显示:
拾取 取消
ANSYS 入门
…图形拾取
热点的拾取位置: • 面和体 有一个热点在图形的中心附近。 • 线 有三个热点 –一个在中间另两个在两端。
为什麽这个很重要: 当您需要拾取图元时,您必须拾取热点。
ANSYS 入门
D. 在线帮助
• ANSYS 提供了基于HTML格式的帮助系统,作为现有帮助系统的 补充。
... GUI方式
输入窗口 • 允许您输入命令。 (大多数 GUI功能都能通过输入命令来实现. 如
果您知道这些命令,可以通过输入窗口键入。) • 在拾取图形时您也可以通过键入命令的方式实现。
命令格式
ANSYS 入门
... GUI方式
工具条
• 包含常用命令的缩写形式。 • 可使用一些预先设置好的命令,也可以添加自己的命令,但需要熟
Zoom Box Zoom Win Zoom
Back Up
By picking center of a square
By picking two corners of a box
Same as Box Zoom, but box is proportional to window.
“Unzoom” to previous zoom.
工具条 将常用的命令制成工 具条,方便使用。
图形 显示由 ANSYS 创 建或传入ANSYS的 图形。
ANSYS入门
... GUI方式
主菜单
• 包括分析所需的主要功能。
• 在进行下一个功能之前,重叠的独立窗口允许您完成 所有必须的操作。
• 约定:
“…”表示产生一个对话框 “ +”表示图形拾取 “ >”表示将产生下一个子菜单 “ ” (空缺)表示运行一个ANSYS命令
应用 拾取和取消的切换
光标显示:
拾取 取消
ANSYS 入门
…图形拾取
热点的拾取位置: • 面和体 有一个热点在图形的中心附近。 • 线 有三个热点 –一个在中间另两个在两端。
为什麽这个很重要: 当您需要拾取图元时,您必须拾取热点。
ANSYS 入门
D. 在线帮助
• ANSYS 提供了基于HTML格式的帮助系统,作为现有帮助系统的 补充。
... GUI方式
输入窗口 • 允许您输入命令。 (大多数 GUI功能都能通过输入命令来实现. 如
果您知道这些命令,可以通过输入窗口键入。) • 在拾取图形时您也可以通过键入命令的方式实现。
命令格式
ANSYS 入门
... GUI方式
工具条
• 包含常用命令的缩写形式。 • 可使用一些预先设置好的命令,也可以添加自己的命令,但需要熟
Zoom Box Zoom Win Zoom
Back Up
By picking center of a square
By picking two corners of a box
Same as Box Zoom, but box is proportional to window.
“Unzoom” to previous zoom.
工具条 将常用的命令制成工 具条,方便使用。
图形 显示由 ANSYS 创 建或传入ANSYS的 图形。
ANSYS入门
... GUI方式
主菜单
• 包括分析所需的主要功能。
• 在进行下一个功能之前,重叠的独立窗口允许您完成 所有必须的操作。
• 约定:
“…”表示产生一个对话框 “ +”表示图形拾取 “ >”表示将产生下一个子菜单 “ ” (空缺)表示运行一个ANSYS命令
《ANSYS基础培训》课件
2
求解分析
学习使用ANSYS求解器进行结构和流体分析,获得精确的模拟结果。
3
后处理
掌握如何在ANSYS中进行后处理,分析和可视化模拟结果。
不同领域的分析
结构分析
深入研究ANSYS在结构分析方 面的应用,如静态、动态、疲 劳分析等。
热分析
学习如何使用ANSYS进行热传 导、热辐射和热对流分析,解 决热问题。
建模与分析
2D和3D建模
学习如何在ANSYS中进行 二维和三维建模,创建复 杂的几何形状。
有限元分析 (FEA)
深入了解有限元分析的原 理和应用,掌握ANSYS中 的FEA技术。
网格生成技术
探索不同的网格生成方法, 优化模型的划分和分析效 果。
边界条件与求解
1
应用边界条件
了解在ANSYS中如何应用边界条件,指定约束和加载。
流体动力学分析
介绍ANSYS在流体动力学领域 的应用,如流体流动、压力分 布等。
优化工具
参数优化
通过ANSYS优化工具进行参数优化,提高产品 性能和效率。
拓扑优化
使用拓扑优化技术,优化结构的材料分布和重 量。
常见问题解决方法
1 错误排查
了解常见的ANSYS错误和故障排除技巧,提高模拟效果。
2 模型修复
《ANSYS基础培训》PPT 课件
欢迎使用《ANSYS基础培训》PPT课件!通过这个课程,您将深入了解 ANSYS的各个方面,从建模到分析,从结构到流体,精通这个强大的工程模 拟软件。
概述
本课程介绍ANSYS的基础知识,包括ANSYS Workbench的概述、ANSYS预 处理、材料属性定义等。
学习如何修复模型中的几何和网格问题,保证模拟的准确性。
ansys教程完整PPT教学课件
jobname.log
文本
结果文件
jobname.rxx
二进制
图形文件
jobname.grph 二进制
ANSYS的数据库,是指在前处理、求解及后处理过程中,ANSYS保存在内存中的数据。数据库既存储 输入的数据,也存储结果数据:
输入数据 - 必须输入的信息 (模型尺寸、材料属性、载荷等).
结果数据 - ANSYS计算的数值 (位移、应力、应变、温度等).
OOPs!
Lines
Keypoints
第20页/共78页
2.布尔操作
1. ..... 2. ..... 3. .....
Procedure
要使用布尔操作: Main Menu: Preprocessor > -Modeling- Operate >
选择一种布尔操作 (例如: Add)
选择图形类型. 将弹出 选取菜 单 (见下页) 提示选择图形进行 布尔操作.
+ 加载的操作更加容易 ,尤其是在图形中直接拾取时.
第24页/共78页
加载 (续)
无论采取何种加载方式,ANSYS求解前都将载荷转化到有限元模型.因此, 加载到实体的载荷将自动转化到 其所属的节点或单元上。
沿线均布的压力
实体模型
加载到实 体的载荷 自动转化 到其所属 的节点或 单元上
均布压力转化到以线为边界的 各单元上
第21页/共78页
四、加载、求解
Objective
4-1. 列表和分类载荷
ANSYS中的载荷可分为:
• 自由度DOF - 定义节点的自由度( DOF ) 值 (结构分析_位移、热 分析_ 温度、电磁分析_磁势等)
• 集中载荷 - 点载荷 (结构分析_力、热分析_ 热导率、电磁分析_
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
– 十分有用,如图,找到两条线的交点并保留四条线段。
L
L
2
1
分割
L
L
6
3L
L
4
5
3.3 实体建模 其它操作
布尔操作对由上到下和由下到上建模方法生成的实体都有效。 除布尔操作外,还可用许多其它的操作:
– 拖拉 – 缩放 – 移动 – 拷贝 – 反射 – 合并 – 倒角
Extrude Scale Move/modify Copy Reflect Merge Fillet
注意:所有的方向都表达为激活坐标系 下的方向,且激活的坐标系必须为笛 卡尔坐标系。
合并(Merge)(Numbering Ctrls>Merge Items>Keypoints) 通过合并重合的关键点或节点等,将两个实体贴上; -合并关键点将会自动合并重合的高级实体。 通常在反射、拷贝、或其它操作引起重合的实体时需要合并。
出的在端点(边界点)的值的条件,称为边界条件,微分方程和边界条件构成数学模型就称为边值问题。 三类边界条件: 边值问题中的边界条件的形式多种多样,在端点处大体上可以写成这样的形式,Ay+By'=C,若B=0,A≠0,则称为第一类边界条
件或狄里克莱(Dirichlet)条件;B≠0,A=0,称为第二类边界条件或诺依曼(Neumann)条件;A≠0,B≠0,则称为第三类边界条件或 洛平(Robin)条件。 总体来说, 第一类边界条件: 给出未知函数在边界上的数值; 第二类边界条件: 给出未知函数在边界外法线的方向导数; 第三类边界条件: 给出未知函数在边界上的函数值和外法向导数的线性组合。
重新定位工作平面
例如, Align WP with Keypoints 提示你拾取三个关键点:第一 个定义原点,第二个定义X轴, 另一个定义X-Y平面
将工作平面恢复到其缺省位置 (在总体X-Y平面的原点), 点击 Align WP with > Global Cartesian.
3.3 实体建模
主题:
粘接
搭接(Overlap) – 除输入实体相互搭接外与粘接相同。
搭接
切分(Divide)
– 将实体切为两个或多个,但相互间仍由公共边界联接(两者 的边界只有一个)。
– 切分的工具可以是工作平面、面、线或体。 – 对将复杂的体切分为简单的体以进行规则网格划分十分有用。
切分
相交(Intersect)
反射
需要合并 或粘接
倒角(Fillet)
线倒角要求两条相交的线在相交处有一个 公共点; – ANSYS 不更新下面的面,因此需要加
或减去倒角区域。 面倒角与此类似。
由基本面剪 去倒角面
生成面
载荷
自由度约束(Constrains) ----定义自由度值, 如应力分析中的位移或热分析 的温度
力/力矩(Force/Moment)----点载荷, 如力或热流率 表面载荷(Pressure)----表面的分布载荷, 如压力或对流 体载荷(Temp)----体或场力,如温度(引起热膨胀)或内部热生成 惯性载荷(Inertia)----由于结构的质量或惯性引起的载荷 如重力及旋转角速 度
拷贝(Copy)
产生一个实体的多个备份; 对每一次拷贝指定拷贝数目及DX,DY,DZ 偏移距离。 DX,DY,DZ 表示为激活的坐标系下; 用于生成多个孔、肋或突起。
反射(Reflect)
沿一个平面镜像实体 定义反射的方向: – X 表示沿YZ 平面反射 – Y 表示沿XZ 平面 – Z 表示沿XY 平面
输入实体
相加
布尔运算
输出实体
加(Add) – 将两个或多个实体合成一个实体。
布尔加
相减(Subtract) – 将输入实体的一个或多个搭接的部分去掉 – 对生成孔或修剪实体十分有用
布尔减
粘接(Glue) – 将两个或多个实体粘接起来,在它们之间形成一个公共的边界。 – 当希望保持两个实体的区别时很有用(例如不同的材料)
建模与求解
1 建模方法
有限元模型的建立方法可分为:
直接法
直接根据机械结构的几何外型建立节点和单元,因此直 接法只适应于简单的机械结构系统。
间接法
适用于具有复杂几何外型、节点及单元数目较多的机械 结构系统。该方法通过点、线、面、体,先建立实体模型, 再进行网格划分,以完成有限元模型的建立。
2 坐标系统及工作平面
或键入增量;
或使用动态模式(类似于 pan-zoom-rotate).
– Offset WP to > 移动工作平面,保持它当前的方向 到想要的位置,位置可以是:
已有的关键点。拾取多个关键 点移动工作平面到它们的平均 位置。 已有的节点
坐标位置 总体坐标原点 激活坐标系的原点
– Align WP with >
数 题y就′(称x)为在初自变值量问的题;同一点x=x0取给定的值,即y(x0 )=y0,y′(x0)= y0′,则这种条件就称为初始条件,由方程和初始条件构成的问 而在许多实际问题中,往往要求微分方程的解在在某个给定的区间a ≤ x ≤b的端点满足一定的条件,如y(a) = A , y(b) = B 则给
在求解之前,通过使用Solution Define load Operate Transfer to FE可以将实体模型载荷转化 到有限元模型上。在察看实体模型和有限元模型上所 有载荷的时候经常用到。
边界条件
初值和边值问题: 对一般的微分方程,求其定解,必须引入条件,这个条件大概分两类---初始条件和边界条件,如果方程要求未知量y(x)及其导
ANSYS中的坐标系有:
总体坐标系
- 总体笛卡尔坐标系 - 总体柱坐标系 - 总体球坐标系
局部坐标系
- 局部笛卡尔坐标系 - 局部柱坐标系 - 局部球坐标系
工作平面坐标系
可以定义任意数目的坐标系, 但任何时候只有一个是激活 的;
图形窗口的当前设置栏显示
激活的坐标系。
缺省时激活的坐标系为总体笛卡
对于有角速度的旋转体,只需 加载w与限制轴向位移。径向 有相对的离心运动。
对称与反对称边界条件
在实际问题中,很多模型和载荷往往是具有某种对称结构的,故可以建立1/2 或1/4的模型。
在结构分析中,对称边界条件指平面外移动和平 面内旋转被设置为0,而反对称边界条件指平面内 移动和平面外旋转被设置为0。
轴或都显示
– 捕捉 – 允许拾取工作平面上的位置,将光 标捕捉的最近的栅格点
– 栅距 – 栅格线之间的距离
– 栅格尺寸 – 显示的工作平面的范围
利用Offset及Align菜单可以将工 作平面移动到任意想要的位置。
– Offset WP by Increments… 利用推动按钮(连同滑块 的增量)进行平移;
◦ 输入量:
力和力矩 FX, FY, FZ, MX, MY, MZ 位移约束 UX, UY, UZ, ROTX, ROTY, ROTZ 耦合及约束方程 等等
◦ 输出量:
计算出的位移UX, UY, UZ, ROTX, ROTY, ROTZ 反力 FX, FY, FZ, MX, MY, MZ 等等
节点坐标系依附在模型的每一个节点上
尔坐标系;
3 坐标系统及工作平面 利用 CSYS 命令(或 Utility Menu
> WorkPlane > Change Active CS
to) 可将激活坐标系改变为:
总体笛卡尔坐标系[csys,0]
总体柱坐标系[csys,1]
总体球坐标系[csys,2]
工作平面坐标系[csys,4]
或用户定义的局部坐标系[csys, n] (n>=11)
– 沿着线— 通过将面沿着一条或一组连续的线拖 拉生成体 [VDRAG]
缩放(Scale)
用于将一种单位制转化为另一种单位制,比如模型在由CAD系 统导入ANSYS中时。
移动(Move/modify)
通过指定DX,DY,DZ 将实体平移或旋转。 – DX,DY,DZ 表达为激活的坐标系下 – 平移实体,激活的坐标系为笛卡尔坐 标系; – 旋转实体,激活的坐标系为柱坐标系 或球坐标系
拖拉(Extrude)
由已有面快速生成体(或由线生成面,关键点生成 线)
如果面已划分了单元,可以由面单元拖拉出体单元。
四种拖拉面的方法: – 沿着法向 — 通过法向偏移面生成体 [VOFFST] – 通过XYZ 偏移 — 通过一般的 x-y-z 偏移[VEXT]
生成体。允许有锥度的拖拉
– 沿着轴 — 通过沿着轴(两个关键点来定义)旋 转面生成体 [VROTAT]
缺省,节点坐标系平行于总体笛卡尔坐标 系。所有施加的力和位移约束缺省都是按 总体笛卡尔坐标系进行表示的。
可以将节点坐标系旋转到任意的局部坐标 系上
Yn Xn
Y X
Yn Xn Yn Xn
Yn Xn
节点坐标系
每一个节点都有一个附着的坐标系。节点坐标系缺省总是 笛卡尔坐标系并与总体笛卡尔坐标系平行。节点力和节点边 界条件(约束)指的是节点坐标系的方向。
– 只保留两个或多个实体的重叠部分 – 如果有两个以上的输入实体,有两种选择: 公共相交和两两相交
公共相交找出所有输入实体的公共重叠部分
两两相交找出每一对实体的重叠区域,可能产生一个以上的 输出实体
公共相交
两两相交
互分(Partition)
– 将两个或多个相交的实体切成多片但仍通过公共的边界相互联 接
通过用 "Prep7>Move/Modify>Rotate Nodal CS to active CS",
选择节点的节点坐标系的朝向将沿着激活坐标系的方向。未选择节点保 持不变。
节点坐标系的显示通过菜单路径Pltctrls>Symbols>NodalCS。这些节点 坐标系的X方向现在沿径向。约束这些选择节点的X方向,就是施加的径 向约束。
L
L
2
1
分割
L
L
6
3L
L
4
5
3.3 实体建模 其它操作
布尔操作对由上到下和由下到上建模方法生成的实体都有效。 除布尔操作外,还可用许多其它的操作:
– 拖拉 – 缩放 – 移动 – 拷贝 – 反射 – 合并 – 倒角
Extrude Scale Move/modify Copy Reflect Merge Fillet
注意:所有的方向都表达为激活坐标系 下的方向,且激活的坐标系必须为笛 卡尔坐标系。
合并(Merge)(Numbering Ctrls>Merge Items>Keypoints) 通过合并重合的关键点或节点等,将两个实体贴上; -合并关键点将会自动合并重合的高级实体。 通常在反射、拷贝、或其它操作引起重合的实体时需要合并。
出的在端点(边界点)的值的条件,称为边界条件,微分方程和边界条件构成数学模型就称为边值问题。 三类边界条件: 边值问题中的边界条件的形式多种多样,在端点处大体上可以写成这样的形式,Ay+By'=C,若B=0,A≠0,则称为第一类边界条
件或狄里克莱(Dirichlet)条件;B≠0,A=0,称为第二类边界条件或诺依曼(Neumann)条件;A≠0,B≠0,则称为第三类边界条件或 洛平(Robin)条件。 总体来说, 第一类边界条件: 给出未知函数在边界上的数值; 第二类边界条件: 给出未知函数在边界外法线的方向导数; 第三类边界条件: 给出未知函数在边界上的函数值和外法向导数的线性组合。
重新定位工作平面
例如, Align WP with Keypoints 提示你拾取三个关键点:第一 个定义原点,第二个定义X轴, 另一个定义X-Y平面
将工作平面恢复到其缺省位置 (在总体X-Y平面的原点), 点击 Align WP with > Global Cartesian.
3.3 实体建模
主题:
粘接
搭接(Overlap) – 除输入实体相互搭接外与粘接相同。
搭接
切分(Divide)
– 将实体切为两个或多个,但相互间仍由公共边界联接(两者 的边界只有一个)。
– 切分的工具可以是工作平面、面、线或体。 – 对将复杂的体切分为简单的体以进行规则网格划分十分有用。
切分
相交(Intersect)
反射
需要合并 或粘接
倒角(Fillet)
线倒角要求两条相交的线在相交处有一个 公共点; – ANSYS 不更新下面的面,因此需要加
或减去倒角区域。 面倒角与此类似。
由基本面剪 去倒角面
生成面
载荷
自由度约束(Constrains) ----定义自由度值, 如应力分析中的位移或热分析 的温度
力/力矩(Force/Moment)----点载荷, 如力或热流率 表面载荷(Pressure)----表面的分布载荷, 如压力或对流 体载荷(Temp)----体或场力,如温度(引起热膨胀)或内部热生成 惯性载荷(Inertia)----由于结构的质量或惯性引起的载荷 如重力及旋转角速 度
拷贝(Copy)
产生一个实体的多个备份; 对每一次拷贝指定拷贝数目及DX,DY,DZ 偏移距离。 DX,DY,DZ 表示为激活的坐标系下; 用于生成多个孔、肋或突起。
反射(Reflect)
沿一个平面镜像实体 定义反射的方向: – X 表示沿YZ 平面反射 – Y 表示沿XZ 平面 – Z 表示沿XY 平面
输入实体
相加
布尔运算
输出实体
加(Add) – 将两个或多个实体合成一个实体。
布尔加
相减(Subtract) – 将输入实体的一个或多个搭接的部分去掉 – 对生成孔或修剪实体十分有用
布尔减
粘接(Glue) – 将两个或多个实体粘接起来,在它们之间形成一个公共的边界。 – 当希望保持两个实体的区别时很有用(例如不同的材料)
建模与求解
1 建模方法
有限元模型的建立方法可分为:
直接法
直接根据机械结构的几何外型建立节点和单元,因此直 接法只适应于简单的机械结构系统。
间接法
适用于具有复杂几何外型、节点及单元数目较多的机械 结构系统。该方法通过点、线、面、体,先建立实体模型, 再进行网格划分,以完成有限元模型的建立。
2 坐标系统及工作平面
或键入增量;
或使用动态模式(类似于 pan-zoom-rotate).
– Offset WP to > 移动工作平面,保持它当前的方向 到想要的位置,位置可以是:
已有的关键点。拾取多个关键 点移动工作平面到它们的平均 位置。 已有的节点
坐标位置 总体坐标原点 激活坐标系的原点
– Align WP with >
数 题y就′(称x)为在初自变值量问的题;同一点x=x0取给定的值,即y(x0 )=y0,y′(x0)= y0′,则这种条件就称为初始条件,由方程和初始条件构成的问 而在许多实际问题中,往往要求微分方程的解在在某个给定的区间a ≤ x ≤b的端点满足一定的条件,如y(a) = A , y(b) = B 则给
在求解之前,通过使用Solution Define load Operate Transfer to FE可以将实体模型载荷转化 到有限元模型上。在察看实体模型和有限元模型上所 有载荷的时候经常用到。
边界条件
初值和边值问题: 对一般的微分方程,求其定解,必须引入条件,这个条件大概分两类---初始条件和边界条件,如果方程要求未知量y(x)及其导
ANSYS中的坐标系有:
总体坐标系
- 总体笛卡尔坐标系 - 总体柱坐标系 - 总体球坐标系
局部坐标系
- 局部笛卡尔坐标系 - 局部柱坐标系 - 局部球坐标系
工作平面坐标系
可以定义任意数目的坐标系, 但任何时候只有一个是激活 的;
图形窗口的当前设置栏显示
激活的坐标系。
缺省时激活的坐标系为总体笛卡
对于有角速度的旋转体,只需 加载w与限制轴向位移。径向 有相对的离心运动。
对称与反对称边界条件
在实际问题中,很多模型和载荷往往是具有某种对称结构的,故可以建立1/2 或1/4的模型。
在结构分析中,对称边界条件指平面外移动和平 面内旋转被设置为0,而反对称边界条件指平面内 移动和平面外旋转被设置为0。
轴或都显示
– 捕捉 – 允许拾取工作平面上的位置,将光 标捕捉的最近的栅格点
– 栅距 – 栅格线之间的距离
– 栅格尺寸 – 显示的工作平面的范围
利用Offset及Align菜单可以将工 作平面移动到任意想要的位置。
– Offset WP by Increments… 利用推动按钮(连同滑块 的增量)进行平移;
◦ 输入量:
力和力矩 FX, FY, FZ, MX, MY, MZ 位移约束 UX, UY, UZ, ROTX, ROTY, ROTZ 耦合及约束方程 等等
◦ 输出量:
计算出的位移UX, UY, UZ, ROTX, ROTY, ROTZ 反力 FX, FY, FZ, MX, MY, MZ 等等
节点坐标系依附在模型的每一个节点上
尔坐标系;
3 坐标系统及工作平面 利用 CSYS 命令(或 Utility Menu
> WorkPlane > Change Active CS
to) 可将激活坐标系改变为:
总体笛卡尔坐标系[csys,0]
总体柱坐标系[csys,1]
总体球坐标系[csys,2]
工作平面坐标系[csys,4]
或用户定义的局部坐标系[csys, n] (n>=11)
– 沿着线— 通过将面沿着一条或一组连续的线拖 拉生成体 [VDRAG]
缩放(Scale)
用于将一种单位制转化为另一种单位制,比如模型在由CAD系 统导入ANSYS中时。
移动(Move/modify)
通过指定DX,DY,DZ 将实体平移或旋转。 – DX,DY,DZ 表达为激活的坐标系下 – 平移实体,激活的坐标系为笛卡尔坐 标系; – 旋转实体,激活的坐标系为柱坐标系 或球坐标系
拖拉(Extrude)
由已有面快速生成体(或由线生成面,关键点生成 线)
如果面已划分了单元,可以由面单元拖拉出体单元。
四种拖拉面的方法: – 沿着法向 — 通过法向偏移面生成体 [VOFFST] – 通过XYZ 偏移 — 通过一般的 x-y-z 偏移[VEXT]
生成体。允许有锥度的拖拉
– 沿着轴 — 通过沿着轴(两个关键点来定义)旋 转面生成体 [VROTAT]
缺省,节点坐标系平行于总体笛卡尔坐标 系。所有施加的力和位移约束缺省都是按 总体笛卡尔坐标系进行表示的。
可以将节点坐标系旋转到任意的局部坐标 系上
Yn Xn
Y X
Yn Xn Yn Xn
Yn Xn
节点坐标系
每一个节点都有一个附着的坐标系。节点坐标系缺省总是 笛卡尔坐标系并与总体笛卡尔坐标系平行。节点力和节点边 界条件(约束)指的是节点坐标系的方向。
– 只保留两个或多个实体的重叠部分 – 如果有两个以上的输入实体,有两种选择: 公共相交和两两相交
公共相交找出所有输入实体的公共重叠部分
两两相交找出每一对实体的重叠区域,可能产生一个以上的 输出实体
公共相交
两两相交
互分(Partition)
– 将两个或多个相交的实体切成多片但仍通过公共的边界相互联 接
通过用 "Prep7>Move/Modify>Rotate Nodal CS to active CS",
选择节点的节点坐标系的朝向将沿着激活坐标系的方向。未选择节点保 持不变。
节点坐标系的显示通过菜单路径Pltctrls>Symbols>NodalCS。这些节点 坐标系的X方向现在沿径向。约束这些选择节点的X方向,就是施加的径 向约束。