汽车车身侧倾控制方法研究
suv过弯侧倾解决方法

suv过弯侧倾解决方法SUV过弯时的侧倾问题一直是该类车型面临的挑战。
由于SUV的高重心和较大的车身尺寸,使其在过弯时更容易倾斜,增加了驾驶员和乘客的不安全感。
为了解决这一问题,制造商和工程师采取了一系列的措施来增强SUV的稳定性和控制性能。
本文将详细介绍SUV过弯侧倾问题的原因,以及可采取的解决方法。
1.原因分析SUV过弯侧倾的原因主要有两个方面。
首先,SUV车身高,重心相对较高,使其在过弯时更容易倾斜。
其次,悬挂结构和车身刚度不足,导致在转弯时车身的侧倾更加明显。
这两个因素共同作用导致了SUV在过弯时的不稳定性和侧倾问题。
2.解决方法为了解决SUV过弯侧倾问题,可以从以下几个方面进行改进:2.1车身结构设计对于SUV的车身结构设计来说,减小车身高度是最直接有效的方法之一。
通过降低车身高度,可以降低重心,减少侧倾的发生。
此外,采用更轻的材料,如高强度钢和铝合金,可以降低整车重量,进一步提升稳定性。
在车身结构上的改进,能够改善SUV过弯侧倾问题。
2.2悬挂系统优化悬挂系统是影响SUV过弯侧倾的关键因素之一。
通过优化悬挂系统,可以提升SUV的稳定性和操控性能。
其中一种改进是采用更坚硬的悬挂弹簧和减振器,以增加悬挂系统的刚度。
这样可以降低悬挂系统的压缩和伸展,减少侧倾的发生。
另外,还可以采用主动悬挂系统,通过电子控制来主动调节悬挂系统的刚度和高度,进一步提升SUV的稳定性。
2.3轴距增加通过增加SUV的轴距,可以提升车辆的横向稳定性。
较长的轴距可以提供更大的支撑面积,减少侧倾的可能性。
此外,较长的轴距还可以提供更大的车内空间,增加乘客的舒适性和乘坐感受。
2.4轮胎选择与调整轮胎对于SUV过弯侧倾问题的解决也起到了至关重要的作用。
选择具有更好抓地力和稳定性的宽胎可以提升车辆的操控性能。
此外,适当调整轮胎的气压也可以减少侧倾的发生。
根据车辆的载重情况和行驶环境,调整轮胎的气压,能够更好地解决SUV过弯侧倾问题。
《汽车工程》2009年(第31卷)1—12期总目次
217 / 2
212 / 3
掺 烧 不 同 比 例生 物 柴 油 的 发 动 机 性 能研 究
基 于 证 据 理 论 和 模 糊 神 经 网 络 的 汽 车换 挡 平 顺 性 评 价 方
法 438 / 0
汽油车和天然气汽车颗粒物排放特性研究 优化 2 11 /4
2 17 /3
C A40 E F 67 H V发动机燃 油经 济性 的 B P神经 网络建 模及 内燃机流一 热耦 合数值模拟 的研究 固— 2 16 /4 2 11 / 5 2 16 / 5
14 /8
混合动力汽车动力 电池热管理系统流场特性研究
3 24 / 2
ห้องสมุดไป่ตู้
日 鲁棒控制理论应用于 C G发动机怠速控制 15 N /6 基于遗传算法的混合动力汽车参数多 目标优化
一一 一 一~一一一 一一一一一一 一 一一 一 一 一 一 一 一一一 一
响的分析 328 / 2
基于试验知识 的 A S自适应控制策略研究与验证 B 车身侧倾 时前轮 主销后倾角对转向稳定性 的影响
柴油机掺烧不 同比例 甲醇混合燃料 的试验研究
增 压 柴 油 机 瞬 态 工 况 燃烧 噪声 实 验 研 究
32 5 / 0
3 29 /0
基于 L 的主动悬架 的滚动时域 输 出反馈控制 MI
离合器到离合器式 自动变速器控制系统的试 验研究
4 1 /] 3
基于 一VM模 型的无 级变速 器夹紧力 控制 系统故障诊 S
断 4 37 / 1
质子交换膜燃料电池堆运行参数优化设计 低附着弯道路面车辆制动力控制策略研究
基 于有 限元技术 的动力 总成悬置支 架拓扑优化 的研究
实验分析(中国汽车技术研究中心汽车工程研究院)
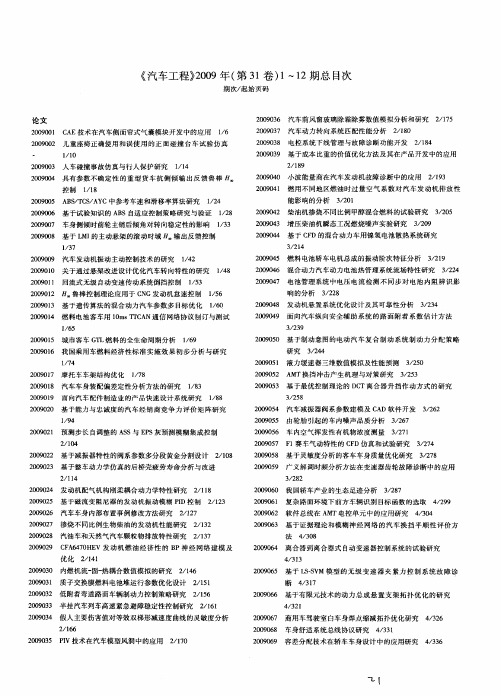
图 1 进气歧管长度对于某发动机扭矩的影响图 2 发动机排放系统控制单元图 3 柴油机台架标定试验车身结构耐撞性优化流程汽车技术研究中心悬架K&C试验台是由英国ABD公司生产的标准双轴悬架参数测量试验台,如图1所示。
设计目的主要用于测量车辆在准静态下的悬架运动性和柔性(K&C)特性,另外该设备还能够精确测量整车的质心位置和转动惯量。
试验室工作人员通过自制工装还能够对于类似重卡驾驶室、发动机和变速箱等总成进行质心位置和转动惯量的测量,如图2所示。
该设备所采用的固定地面平面的方法更如实的模拟了车辆在道路上弹跳、侧倾和俯仰运动,这也使在精确测量质心和转动惯量上具有很大的优势。
图1 中汽中心悬架KC试验台图2 重卡驾驶室质心位置和转动惯量测量如图3所示,该设备主要由中心平台,4个车轮平台,测量系统,惯性测量系统组成。
图3 悬架K&C试验台组成四立柱试验室中国汽车技术研究中心四立柱道路模拟试验台是由德国IST公司生产的,并配有高低温湿热环境仓,如图1所示,主要用来考核不同路面激励下整车的疲劳、噪音、振动和舒适性,此外还可以校验底盘参数。
图1 中国汽车技术研究中心四立柱试验台四立柱试验台主要由悬浮地基、液压系统、轴轮距调节系统和8800数控系统组成,如图2所示,其中液压系统是试验台的核心,包括液压泵站、起停阀、分油器、蓄能器、作动器、硬管和软管等,液压泵站压力可达到280 bar,并仅需要较少的功率和较少的液压油,运行稳定,性能优越。
Labtronic 8800是IST 为仿真与部件测试提供的新型数字控制器,它与特有的基于PC机的Windows NT环境的应用软件完美结合,是当前世界上最先进的测试控制系统之一。
图2 四立柱试验台组成试验时,试验车车轮直接由托盘托住,车身无任何约束,可以自由进行俯仰、侧倾和扭转,对车身结构产生损伤的80%的路面载荷可以重现出来,输入信号可以是:a路面的垂向不平度;b路面测试数据的统计量;c通过车辆轴头或其它部位的路面响应信号迭代得到的车轮驱动信号。
汽车ERC
汽车侧倾时左右侧车轮垂直载荷发生转移,当载荷转移率| LTR |》1,内 侧车轮垂直载荷全部转移到外侧车轮时,内侧车轮开始被举离地面,汽 车开始发生侧翻。 是对于本文研究的汽车 ESP 系统而言,ESP 系统标 准传感器不能对各轮胎垂直载荷进行直接测量,不能选用 LTR 值来衡量 汽车侧倾稳定性。因此采用传统传感器信号静态门限值控制方法阻止汽 车侧翻,比如当汽车的侧向加速度、侧倾角度或者侧倾角速度超过设定 的门限值时,立即采取措施对其进行控制。将 LTR 近似表达为准静态侧 极限工况下或者特殊状况下发生的绕纵向轴线的 翻转,使汽车车身与地面发生接触的高度危险的侧向运动,汽车侧翻主 要分为两种:一种是由于汽车惯性力引起的非绊倒侧翻(maneuver induced rollover),另一种是由于汽车侧滑后撞击障碍物引起的绊倒侧 翻(tripped rollover)。第一种是指汽车在道路上(包括侧向坡道)上行 驶时,由于汽车的侧向加速度超过一定极限值,使得汽车内侧车轮的垂 直反力为零,导致车轮被举离地面的侧翻。第二种是指在行驶过程中产 生的侧向滑移,由侧滑导致汽车与障碍物发生撞击而引起的汽车绊倒侧 翻。本文只讨论第一种非绊倒侧翻。 汽车的“准静态”侧翻是指当汽车
的侧向加速度变化较慢时,汽车稳态转向下发生的侧翻。汽车开始侧翻 时所受的侧向加速度(g)称为侧翻阀值,而汽车的瞬态侧翻阀值要比准 静态时的小很多,为了解侧向加速度变化较快时汽车的侧翻,必须研究 汽车的侧倾响应特性。
3 紧急侧倾控制设计 紧急侧倾控制设计思路是采用ESP系统横摆角速度传感器、侧向加速度 传感器、轮速传感器等信息对汽车侧倾状态进行估计,并通过侧向加速 度传感器提供的汽车侧向加速度信息计算出侧倾系数。当侧倾系数超过 设置的参考值时,紧急侧倾控制将立刻被激活,ESP 系统自动对汽车前 外轮产生较大的紧急制动力实现对侧向加速度的适时调节,减小侧倾系 数,阻止汽车侧翻,实现汽车的侧倾稳定性控制。 汽车侧倾稳定性可通 过测量汽车轮胎动态的横向载荷转移率(Load Transfer Ratio, LTR)来反映,即左右两侧车轮垂直载荷的转移量。本文定义为:
提高车辆转向稳定性的车身主动侧倾控制研究
DOI:10.13878/j.cnki.jnuist.20230112001刘晓文1㊀徐晓美1㊀台永鹏1提高车辆转向稳定性的车身主动侧倾控制研究摘要车辆高速转向时,车身向弯道外侧倾斜,严重时会导致侧翻事故.针对此问题,开展了提高车辆转向稳定性的车身主动侧倾控制研究.首先建立了考虑横摆和侧倾运动的六自由度车辆动力学模型;然后确定了车辆在转向运动时的期望侧倾角,并以此为控制目标设计主动侧倾控制器,使车身实际侧倾角逼近期望侧倾角.在不同行驶工况下,仿真研究了车身侧倾角㊁乘员感知加速度和横向载荷转移率,并考察了实现主动侧倾控制所需的主动悬架功耗和由主动侧倾引起的悬架动挠度变化.研究结果表明:主动侧倾控制能实现车辆转向时实际侧倾角迅速逼近期望侧倾角,且在复杂行驶工况下依然能使车辆具有良好的行驶稳定性;主动侧倾控制减小了悬架的动挠度峰值,使乘员感知侧向加速度和横向载荷转移率都能快速接近零值,且实现主动侧倾的主动悬架功耗较小,保证了车辆的经济性能.关键词稳定性控制;主动侧倾控制;主动悬架;PID控制;MATLAB/Simulink中图分类号U463 4文献标志码A收稿日期2023⁃01⁃12资助项目江苏省第十四批 六大人才高峰 项目(JXQC⁃25)作者简介刘晓文,男,硕士生,主要从事车辆系统动力学与控制研究.1275854060@qq.com徐晓美(通信作者),女,博士,教授,主要从事车辆系统动力学与控制等方面的研究工作.xxm120480@126.com1南京林业大学汽车与交通工程学院,南京,2100370 引言㊀㊀车辆高速转向时,由于车身向弯道外侧倾斜,不仅降低了驾乘人员的乘坐舒适性,而且还会导致侧翻事故,威胁驾乘人员的生命安全.为了改善这种状况,多种提高车辆转向稳定性的方法被提出[1⁃2],包括:改变悬架刚度或阻尼系数[3⁃4];在横向稳定杆上加入控制器,对横向稳定杆实施主动或半主动控制[5];通过主动或半主动悬架对车身侧倾角和因侧倾引起的侧向力矩进行调节,即所谓的车身主动侧倾控制.车身主动侧倾是指在车辆转向行驶时,通过主动使车身向弯道内侧倾斜一定角度,以平衡车辆高速转向时因离心力作用而使车身向弯道外侧侧倾的侧倾力矩,从而达到提高车辆弯道行驶的平顺性和稳定性的目的[6⁃8].车身主动侧倾的研究经历了从提出控制方法到方法验证,再到机构设计与方案实现等过程.Piyabongkarn等[9]提出主动侧倾的两种控制方法,即RHC(RecedeHorizonControl)和DTC(DirectTiltControl),前者通过道路曲率的预瞄使车身的侧倾与驾驶员的转向操作产生同步,后者则采用侧倾机构直接将车辆侧倾至最佳角度.Pha⁃nomchoeng等[10]建立了车辆的六自由度横向动力学模型,针对DTC方案能耗大㊁转向侧倾不同步等问题开展了优化研究.在此基础上,Jeon等[11]提出一种配备主动或半主动悬架的车辆侧倾模型,通过整车试验研究,验证了此主动侧倾车辆模型的估计精度.刘平义等[12]提出一种主动侧倾角计算方法,得到用于平衡车辆稳态转向侧向力矩的车辆主动侧倾角,并通过一种窄型车辆的转向试验研究验证了所提出的主动侧倾角计算方法的可靠性.凌俊威[13]提出一种慢主动悬架实现车身主动逆向侧倾控制,在不恶化平顺性的条件下,改善了车辆的操纵性和安全性.张曦月[14]提出一种结合车辆行驶状态和道路信息的稳定边界辨识方法,基于动态约束的车辆侧向稳定性控制方法使车辆向内侧倾,并通过硬件在环试验,验证了所提控制策略能有效保证车辆在极限工况下行驶的稳定性.上述研究主要侧重于车辆侧倾模型以及主动侧倾控制算法的研究,并没有考虑路面状况和转向工况对主动侧倾效果的影响.本文以某两轴车辆为研究对象,主要探讨在不同路面激励和不同转向工况下主动侧倾车辆的车身侧倾角㊁乘员感知加速度和横向载荷转移率,并评价车身主动侧倾引起的悬架动挠度和悬架功耗,以期为车身主㊀㊀㊀㊀动侧倾控制提供理论参考.1㊀车辆动力学模型基于相关动力学理论和车辆受力与运动情况,建立包括车辆横摆与侧倾运动在内的六自由度车辆动力学模型.1 1㊀两自由度转向模型图1为简化的两自由度线性转向模型.在此平面模型中,作如下假设:不考虑地面切向力对轮胎侧偏特性的影响;不考虑轮胎回正力矩以及轮胎侧偏特性的变化;不考虑空气阻力;不考虑转向系统的影响,车辆的转向输入为前轮转角;x轴方向的车辆行驶速度v不变.在此情况下,车辆只有沿y轴方向的侧向运动和绕z轴的横摆运动.图1㊀车辆侧向和横摆运动模型Fig 1㊀Vehiclemodeloflateralandyawmotions图1中:a,b分别为质心到前㊁后轴的距离;Ff,Fr分别为前㊁后轮受到的侧向力;δ为前轮转角;ψ为横摆角位移.所建车辆动力学方程如式(1)和(2)所示:m㊆y+ṁψv-msh㊆θ=Ffcosδ+Fr,(1)Iz㊆ψ=aFf-bFr,(2)其中,Ff=2cfδ-̇y+ȧψvæèçöø÷,Fr=2cr-̇y-ḃψvæèçöø÷,式中:m为整车质量;ms为簧上质量;h为质心至侧倾中心的垂向距离;θ为车身侧倾角;Iz为横摆转动惯量;cf,cr分别为前㊁后轮的侧偏刚度.1 2㊀四自由度侧倾模型由于离心力作用,车辆在转向时会向弯道外侧倾斜,前㊁后轴左右两侧车轮的垂直载荷也会发生变化.因此,为更准确地分析车辆的转向运动,需要考虑车厢侧倾运动以及悬架和车轮受到的地面激励对车辆转向运动的影响.图2为考虑车身侧倾和垂向运动的四自由度车辆简化模型.图2㊀车辆垂向和侧倾运动模型Fig 2㊀Vehiclemodelofverticalandrollmotions图中:ks1,ks2分别为左㊁右悬架弹簧刚度;cs1,cs2分别为左㊁右悬架阻尼系数;f1,f2分别为左㊁右悬架可控阻尼力;mu1,mu2分别为左㊁右悬架簧下质量;zu1,zu2分别为左㊁右悬架簧下垂向位移;zr1,zr2分别为左㊁右车轮受到的地面垂直激励;z为簧上质量的垂向位移.车辆侧倾运动动力学方程如式(3)所示:Ix㊆θ=(Fs1-Fs2)d+ms(㊆y+̇ψv)h+msghθsinθ+Mt.(3)簧载质量垂向动力学方程如式(4)所示:ms㊆z=Fs1+Fs2+f1+f2.(4)非簧载质量垂向动力学方程如式(5)所示:mu1㊆zu1=-Fs1-kt1(zu1-zr1)-f1,mu2㊆zu2=-Fs2-kt2(zu2-zr2)-f2,{(5)其中,Fs1=-ks1(zs1-zu1)-cs1(̇zs1-̇zu1),Fs2=-ks2(zs2-zu2)-cs2(̇zs2-̇zu2),zs1=z+θd,zs2=z-θd,f1+f2=0,Mt=f1d-f2d=2f1d,ìîíïïïïïïïï式中:Ix为簧上质量绕x轴的侧倾转动惯量;d为车427刘晓文,等.提高车辆转向稳定性的车身主动侧倾控制研究.LIUXiaowen,etal.Improvevehiclesteeringstabilityviaactiverollcontrol.辆轮距长度的一半;Mt为主动悬架控制力矩;kt1,kt2分别为左㊁右车轮垂向刚度.2㊀主动侧倾控制器设计2 1㊀期望侧倾角主动侧倾即希望车辆在转弯时车身主动向弯道内侧倾斜,使车辆受重力产生的力矩与受离心力产生的力矩相抵消,从而保证车辆转弯行驶的稳定性,使乘员感知侧向加速度接近于零.由重力产生的力矩如式(6)所示:MG=msghsinθ.(6)由离心力产生的力矩如式(7)所示:Mf=ms(㊆y+v̇ψ)hcosθ.(7)当MG=Mf且车辆稳态行驶时,y轴上的加速度为零,此时为车辆转弯时的理想状态,由此可得车辆主动侧倾期望侧倾角[15]:θdes=arctan(v̇ψ/g).(8)作为评价主动侧倾控制效果的重要评价指标,乘员感知侧向加速度由3部分组成,即重力加速度㊁车身侧倾加速度和侧向加速度[16],如式(9)所示:aper=㊆ycosθ+h㊆θ-gsinθ.(9)横向载荷转移率LTR(LateralLoadTransferRatio)常用来评价车辆转向时的抗侧翻能力[17],其表达如式(10)所示:rLTR=ms㊆yh+Ix㊆θ-msghθmsgd.(10)2 2㊀控制器设计基于PID设计车辆的主动侧倾控制器,其主要控制思想为:在车辆进行转向时,由陀螺仪检测车身侧倾角,并将其与期望侧倾角比较,得到误差并反馈给PID控制器;控制器接收到误差信息后计算达到期望侧倾角所需要的主动侧倾控制力矩;控制力矩通过悬架作用传递给车身,车辆簧上和簧下部分分别受到悬架力矩的作用,使车辆达到转向离心力产生的力矩与侧倾力矩相等的理想状态,从而提高车辆转弯时的侧倾稳定性.控制器的性能通常由系统的响应时间㊁稳态误差以及峰值响应等指标进行评价.PID控制器的参数调节包括调节比例系数Kp㊁积分系数Ki和微分系数Kd.在调参过程中,往往是先确定Kp系数,以加快系统的响应时间,最快程度上消除系统误差;接着引用Ki参数消除稳态误差以使得被控对象的数值达到给定值并减小系统的振荡;最后加入适量大小的Kd参数,减小系统的超调和振荡,改善系统的稳定性.图3为主动侧倾控制系统框图.设定车辆动力学系统输入为车速v和前轮转角δ,输出为实际侧倾角θ;两自由度转向模型输出的横摆角速度和y轴上的位移作为四自由度侧倾模型的输入;由四自由度侧倾模型算出实际侧倾角θ,实际侧倾角θ与期望侧倾角θdes的差值反馈给PID控制器;控制器输出控制力矩Mt到四自由度侧倾模型,控制力矩Mt的计算式如式(11)所示.Mt=Kpe(t)+Kiʏt0e(t)dt+Kdde(t)dt,(11)式中,e(t)为实际侧倾角与期望侧倾角的差值.图3㊀主动侧倾控制系统框图Fig 3㊀Blockdiagramofactiverollcontrolsystem3㊀仿真结果及分析为验证所提出的控制策略与设计的控制器的有效性,在MATLAB/Simulink环境下,以地面激励模拟车辆行驶中的地面干扰,对车辆的转向侧倾稳定性进行仿真研究.3 1㊀正弦路面激励下恒定车速变转角工况本节研究正弦路面激励下恒定车速和变前轮转角输入工况下车辆的转向稳定性问题.假设车辆以10m/s的车速在幅值为0 04m㊁频率为0 056m-1的正弦路面激励下行驶,前轮转角从π/30逐渐增加至π/15.图4a和4b分别为在此工况下,无侧倾控制和有侧倾控制车辆侧倾角的变化,图4b还给出了期望侧倾角.可见,无侧倾控制时车辆的侧倾角在车辆行驶过程中有较大幅度的波动,且侧倾角的稳定值远大于有侧倾控制时的侧倾角.在主动侧倾控制下,车身侧倾角很小,并且能在短时间内进入稳定状态,始终围绕期望侧倾角作小幅波动.前已述及,乘员感知侧向加速度表示乘员在车辆转向时的感知能力,也是反映车辆行驶侧向稳定527学报(自然科学版),2023,15(6):723⁃730JournalofNanjingUniversityofInformationScience&Technology(NaturalScienceEdition),2023,15(6):723⁃730图4㊀汽车车身侧倾角Fig 4㊀Rollanglesofvehiclebody性的一个重要指标.乘员感知侧向加速度越接近于零,车辆的转向行驶侧向稳定性就越好.图5为乘员感知侧向加速度响应曲线.由图5可以看出,无侧倾控制车辆的乘员感知侧向加速度在转向开始时达到较大值,然后起伏变化,但无法在短时间内稳定到零值;对于有侧倾控制的车辆,乘员感知侧向加速度在小幅波动后,车身姿态得到迅速调节,0 45s后主动侧倾控制力矩与离心力产生的力矩几乎相互抵消,使得乘客感知侧向加速度接近于零.横向载荷转移率也是评价车辆转向性能的重要指标,其大小越接近于0,车辆的转向稳定性越好,抗侧翻能力越强.图6为无侧倾控制和侧倾控制下车辆横向载荷转移率LTR的变化情况.由图6可见,两条LTR曲线在经过初始的波动后,无侧倾控制车辆的LTR值始终在大幅度波动,而主动侧倾控制车辆的LTR值在短时间内迅速减小,0 5s后趋于稳定并维持在零值附近不变,即主动侧倾控制显著降低了车辆的横向载荷转移,大大减小了车辆的侧翻风险.悬架动挠度是汽车行驶平顺性的重要评价指标.图7所示为有侧倾控制和无侧倾控制下左㊁右后悬架动挠度的响应曲线.由图7可以看出,当车辆以变化的前轮转角转向行驶时,相比于无侧倾控制车辆,有侧倾控制车辆后悬架的动挠度峰值也得到了有效控制.这说明在转向工况下,主动侧倾控制可以明显改善车辆的行驶平顺性.图5㊀乘员感知侧向加速度Fig 5㊀Lateralaccelerationperceivedbyoccupants图6㊀横向载荷转移率Fig 6㊀Lateralloadtransferratio3 2㊀复合路面激励下变车速变转角工况本节研究复合路面激励下变车速和变前轮转角输入工况下车辆的转向稳定性问题.复合路面由C级路面和前述正弦路面叠加而成.假设车辆以幅值为π/30的正弦转角在复合路面上行驶,且行驶速度在6s内从10m/s加速到13m/s.图8a和8b分别为在此工况下,无侧倾控制和有侧倾控制车辆侧倾角的变化,图8b也给出了期望侧倾角.由图8可见:在车辆前轮转角和速度都发生变化时,无侧倾控制车辆的车身侧倾角与期望值相差较大且一直处于振荡中,这说明无侧倾控制车辆在复合路面激励下变道变速行驶时车辆的行驶稳定性较差;而在侧倾控制627刘晓文,等.提高车辆转向稳定性的车身主动侧倾控制研究.LIUXiaowen,etal.Improvevehiclesteeringstabilityviaactiverollcontrol.图7㊀左㊁右后悬架动挠度Fig 7㊀Dynamicdeflectionofleftandrightrearsuspensions图8㊀汽车车身侧倾角Fig 8㊀Rollanglesofvehiclebody下,实际车身侧倾角能很好地逼近期望值,并在零值附近小幅波动,这说明即便是在复杂行驶工况下,主动侧倾控制车辆依然具有良好的行驶稳定性.图9和图10分别为有㊁无主动侧倾控制下的乘员感知侧向加速度与车身横向载荷转移率.可以看出:当车辆行驶在复合路面上时,这两项指标都会因为地面干扰发生振荡变化,都在一定范围内波动,但无侧倾控制车辆的乘员感知侧向加速度和横向载荷转移率的波动范围更大,且所围绕波动的稳定值也较大;主动侧倾控制下的乘员感知侧向加速度和横向载荷转移率基本在零值上下波动.图11为复合路面激励下有侧倾控制和无侧倾控制时左后悬架动挠度响应曲线.由图11可以看出:车辆在复合路面激励下变速转向行驶时,无侧倾控制车辆的左后悬架动挠度一直在较大幅度范围内波动;而有侧倾控制车辆的左后悬架动挠度的幅值明显低于无侧倾控制车辆,且在4s后,基本维持在一个小范围内波动.显然,主动侧倾车辆在复合路面激励下变速转向行驶时的悬架动挠度更小.图9㊀乘员感知侧向加速度Fig 9㊀Lateralaccelerationperceivedbyoccupants图10㊀横向载荷转移率Fig 10㊀Lateralloadtransferratio3 3㊀主动悬架功耗评价主动侧倾车辆的经济性需要对主动悬架的功耗进行计算.假设车辆以固定速度和固定前轮转角在路面上转向行驶,忽略路面垂直激励的影响,对727学报(自然科学版),2023,15(6):723⁃730JournalofNanjingUniversityofInformationScience&Technology(NaturalScienceEdition),2023,15(6):723⁃730图11㊀左后悬架动挠度Fig 11㊀Dynamicdeflectionofleftrearsuspension主动侧倾控制系统进行仿真,考察主动侧倾车辆悬架的功耗.图12为计算得到的主动悬架输出的控制力矩变化曲线.由图12可知,每一侧悬架控制力矩约为1700N㊃m.由于悬架控制力矩是随时间变化的,所以可用积分法求主动悬架的功耗,如式(12)所示:ʏf㊃(̇z1-̇z2)dx=ʏPdt,(12)式中:z1,z2分别表示簧上㊁簧下质量的位移量;f表示悬架控制力.图12㊀主动悬架控制力矩Fig 12㊀Activesuspensioncontroltorque图13为左侧悬架的功耗,右侧悬架功耗与左侧悬架相当.由图13可知,左侧悬架的功耗在0 1s内迅速增大,经过小幅波动后达到稳定值,大小约为300kJ.显然,对于主动控制而言,此值是比较理想可行的,这表明主动侧倾在满足车辆稳定行驶的同时,能保证车辆良好的经济性能.如果需要减少功耗则需要减小悬架单位位移下的控制力大小,即在评价指标允许的合理范围内改变期望侧倾角,以使悬架单位位移下的控制力减小.图13㊀左侧悬架功耗Fig 13㊀Powerconsumptionofleftsuspension4 结语基于某两轴车辆开展了车身主动侧倾控制研究,比较分析了有/无侧倾控制下车身侧倾角㊁乘员感知侧向加速度㊁横向载荷转移率㊁悬架动挠度的变化情况,并对主动侧倾控制下悬架功耗进行了计算,主要研究结论如下:1)在正弦路面激励㊁恒定车速㊁变前轮转角输入工况下,主动侧倾控制的车身侧倾角很小并且能在短时间内进入稳定状态,乘员感知侧向加速度和横向载荷转移率在小幅波动后都能迅速接近于零,悬架的动挠度峰值也能得到有效控制.2)在复合路面激励㊁变车速㊁变前轮转角输入工况下,主动侧倾控制的车身侧倾角㊁乘员感知侧向加速度和横向载荷转移率基本都在零值附近上下波动,悬架动挠度幅值明显低于无侧倾控制车辆.这表明,即便是在复杂行驶工况下,主动侧倾控制车辆依然具有良好的行驶稳定性和平顺性.3)主动侧倾控制车辆的悬架功耗较小,文中所研究车辆的悬架功耗约为300kJ,表明主动侧倾在满足车辆稳定行驶的同时,能保证车辆良好的经济性能.827刘晓文,等.提高车辆转向稳定性的车身主动侧倾控制研究.LIUXiaowen,etal.Improvevehiclesteeringstabilityviaactiverollcontrol.参考文献References[1]㊀付翔,杨凤举,黄斌,等.主动后轮转向四轮独立驱动车辆的协调控制[J].江苏大学学报(自然科学版),2021,42(5):497⁃505FUXiang,YANGFengju,HUANGBin,etal.Coordinatedcontrolofactiverearwheelsteeringandfourwheelinde⁃pendentdrivingvehicle[J].JournalofJiangsuUniversity(NaturalScienceEdition),2021,42(5):497⁃505[2]㊀胡文,吴洋,陈盛钊,等.面向性能需求的动态调节消扭悬架参数匹配与动力学研究[J].振动与冲击,2018,37(24):172⁃180,200HUWen,WUYang,CHENShengzhao,etal.Parametermatchingandkineticstudiesofdynamictorsion⁃eliminationsuspensionbasedonperformancerequirements[J].JournalofVibrationandShock,2018,37(24):172⁃180,200[3]㊀SunW,LiYN,HuangJY,etal.Efficiencyimprovementofvehicleactivesuspensionbasedonmulti⁃objectivein⁃tegratedoptimization[J].JournalofVibrationandControl,2017,23(4):539⁃554[4]㊀汪晓,于曰伟,周长城,等.渐变刚度板簧式轻卡悬架阻尼参数仿真设计[J].计算机仿真,2020,37(4):107⁃112,214WANGXiao,YUYuewei,ZHOUChangcheng,etal.Sim⁃ulationdesignofdampingparametersoflighttrucksus⁃pensionsystemwithgradualrigidityleafspring[J].Com⁃puterSimulation,2020,37(4):107⁃112,214[5]㊀邱香,吴新宇,陈正科,等.考虑状态获取的主动前轮转向与主动横向稳定杆多目标集成控制[J].机械科学与技术,2022,41(3):386⁃393QIUXiang,WUXinyu,CHENZhengke,etal.Multi⁃ob⁃jectiveintegratedcontrolofactivefrontsteeringandactiveanti⁃rollbarconsideringstateacquisition[J].Me⁃chanicalScienceandTechnologyforAerospaceEngineer⁃ing,2022,41(3):386⁃393[6]㊀MashadiB,MostaghimiH.Vehiclelift⁃offmodellingandanewrolloverdetectioncriterion[J].VehicleSystemDy⁃namics,2017,55(5):704⁃724[7]㊀周辰雨,周猛,余强,等.基于T⁃S模糊方法的车辆主动悬架多目标控制研究[J].公路交通科技,2021,38(10):144⁃152ZHOUChenyu,ZHOUMeng,YUQiang,etal.Studyonmulti⁃objectivecontrolofvehicleactivesuspensionbasedonT⁃Sfuzzymethod[J].JournalofHighwayandTrans⁃portationResearchandDevelopment,2021,38(10):144⁃152[8]㊀YounI,ImJ,TomizukaM.Levelandattitudecontroloftheactivesuspensionsystemwithintegralandderivativeaction[J].VehicleSystemDynamics,2006,44(9):659⁃674[9]㊀PiyabongkarnD,KeviczkyT,RajamaniR.Activedirecttiltcontrolforstabilityenhancementofanarrowcommutervehicle[J].InternationalJournalofAutomotiveTechnology,2004,5(2):77⁃89[10]㊀PhanomchoengG,RajamaniR.Newrolloverindexforthedetectionoftrippedanduntrippedrollovers[J].IEEETransactionsonIndustrialElectronics,2013,60(10):4726⁃4736[11]㊀JeonC,NaH,YouSH.Developmentofvehiclerollmodelforactivesuspensioncontrolsystem[J].TransactionoftheKoreanSocietyofAutomotiveEngi⁃neers,2020,28(2):109⁃115[12]㊀刘平义,柯呈鹏,高偌霖,等.主动侧倾车辆设计与试验[J].汽车工程,2020,42(11):1552⁃1557,1584LIUPingyi,KEChengpeng,GAORuolin,etal.Designandtestofactiverollvehicle[J].AutomotiveEngineering,2020,42(11):1552⁃1557,1584[13]㊀凌俊威.基于一种慢主动悬架的车身主动侧倾控制系统仿真研究[D].北京:北京理工大学,2016LINGJunwei.Researchandsimulationontheactiverollcontrolsystembasedonaslow⁃activesuspension[D].Beijing:BeijingInstituteofTechnology,2016[14]㊀张曦月.基于稳定边界辨识的极限工况下车辆稳定性控制[D].长春:吉林大学,2022ZHANGXiyue.Vehiclestabilitycontrolbasedonidentifi⁃cationofstabilityboundaryunderextremeconditions[D].Changchun:JilinUniversity,2022[15]㊀姚嘉凌,王蒙,李智宏,等.基于主动悬架的车辆主动侧倾控制研究[J].机械强度,2018,40(3):534⁃539YAOJialing,WANGMeng,LIZhihong,etal.Researchonautomobileactiverollcontrolbasedonactivesuspension[J].JournalofMechanicalStrength,2018,40(3):534⁃539[16]㊀YimS,KimN,HwangSW,etal.PreviewcontrollerdesignforactiverollcontrolwithV2Vcommunicationandcontinuousdampingcontrol[J].JournalofInstituteofControl,RoboticsandSystems,2017,23(12):1020⁃1026[17]㊀JinZL,ZhangL,ZhangJL,etal.StabilityandoptimizedH⁃controloftrippedanduntrippedvehiclerollover[J].VehicleSystemDynamics,2016,54(10):1405⁃1427ImprovevehiclesteeringstabilityviaactiverollcontrolLIUXiaowen1㊀XUXiaomei1㊀TAIYongpeng11CollegeofAutomobileandTrafficEngineering,NanjingForestryUniversity,Nanjing㊀210037,ChinaAbstract㊀Thetiltingofvehicletowardstheoutsideofthecurvecausedbyhigh⁃speedturningwillleadtoaroll⁃overaccidentinseverecases.Toaddressthisproblem,theActiveRollControl(ARC)ofthevehiclebodywasstud⁃927学报(自然科学版),2023,15(6):723⁃730JournalofNanjingUniversityofInformationScience&Technology(NaturalScienceEdition),2023,15(6):723⁃730iedtoimprovethevehiclesteeringstability.AvehicledynamicmodelwithsixDegreesofFreedom(DOFs)wases⁃tablishedconsideringbothyawandrollmotions.Then,thedesiredvehiclerollanglewasdetermined,andanactiverollcontrollerwasdesignedtomaketheactualrollangleapproachthedesiredrollangle.Finally,simulationswerecarriedouttoobtainvehiclebodyrollangles,accelerationperceivedbyoccupantsandthelateralloadtransferrates,andinvestigatethepowerconsumptionofactivesuspensionforrollcontrolaswellasthedynamicdeflectionofthesuspensionduetotheactiverollunderdifferentdrivingconditions.TheresultsshowthattheARCcanmaketheac⁃tualrollanglerapidlyapproachthedesiredrollangle,andstillensuredrivingstabilityundercomplexdrivingcondi⁃tions;theARCreducesthepeakvalueofthesuspensiondynamicdeflection,anddecreasesthelateralaccelerationperceivedbyoccupantsandthelateralloadtransfertozero;thelowpowerconsumptionoftheactivesuspensionforrollcontrolensuresthevehicle seconomicperformance.Keywords㊀stabilitycontrol;activerollcontrol(ARC);activesuspension;PIDcontrol;MATLAB/Simulink037刘晓文,等.提高车辆转向稳定性的车身主动侧倾控制研究.LIUXiaowen,etal.Improvevehiclesteeringstabilityviaactiverollcontrol.。
双横臂悬架侧倾中心研究

双横臂独立悬架动态侧倾中心的研究0 引言车辆在行驶的过程中,由于路况较为复杂,当车辆路过崎岖路面或进行转向时,车轮与路面间的相对位置关系发生改变,进而将会导致车辆侧倾中心位置的变化。
在悬架运动过程中,侧倾中心的位置是瞬时变动的。
悬架的侧倾中心高度决定了整车侧倾轴线的位置。
侧倾中心位置高,它到簧载质量质心的距离就会相应缩短,在相同的侧向力作用下,则侧倾力臂与侧倾力矩均会较小,有利于车辆的稳定性。
然而,侧倾中心也不能过高,否则会使得车身侧倾时轮距变化过大,进而加剧轮胎的磨损[1]。
在确定侧倾中心的高度时,应该综合考虑各类因素的影响。
常用的轿车前独立悬架侧倾中心高度为0~120 mm,后独立悬架(不包括纵臂式)侧倾中心高度为80~150 mm[2]。
上、下横臂轴轴线皆与车辆纵向轴线平行的双横臂独立悬架是此类悬架中结构最简单的一种[3]。
1 车辆动态侧倾中心的坐标表示1.1 车身坐标系的建立建立一固连在车身上的坐标系,如图1所示。
此车身坐标系建立原则如下:以车辆静止停靠在水平路面上时的轮胎接地点G1、G2点所在直线与车辆左右中心轴线的交点为坐标系原点O;y轴沿车辆左右中心轴线,由O点指向车厢顶部方向为y轴正方向;x轴垂直于y轴,并定义由O点指向车辆右侧方向为x轴正方向。
汽车车身相对于车身坐标系静止。
图1 双横臂独立悬架车辆示意图我们作出如下假设:(1)车辆左、右侧悬架以及车辆结构、形式相同,簧载质量质心位于车辆左右中心轴线、即y轴上;(2)将双横臂悬架的横臂以及转向节、车身等均视为刚体,忽略一切弹性变形效应;(3)将轮胎简化成一条直线,不考虑其断面宽度,并认为在与地面接触过程中,车轮不发生变形以及相对滑动。
1.2 内转向定点A1、A2、D1、D2在坐标系中的位置双横臂悬架内转向点A1、A2、D1、D2在车身坐标系xoy中为4个定点,即它们在车身坐标系中的坐标表示不会随车轮的跳动而发生变化。
因此,我们可以选取“当车辆静止停靠在水平路面上时”这一特殊工况,以进行定点坐标的确定。
车身侧倾角

车身侧倾角计算一、非独立悬架的侧倾角刚度侧倾角刚度是指簧载质量所受侧倾力距与其侧倾角的比值,即产生单位侧倾角的侧倾力距。
见图1所示,M为车身侧倾时所受的侧倾力矩(单位:Nmm),其与弹簧所产生的恢复力矩相等;P为弹簧所产生的恢复力(单位:N),K0为单侧弹簧的刚度(单位:N/mm),B为弹簧中心距(单位:mm),Φ为车身侧倾角(单位:rad),它们之间有如下关系M=2P×B/2=PB (1)1P= K0f =K0BΦ(2)2式中f为在力P作用下弹簧所产生的挠度。
将式(2)带入式(1)得1M= B2K0Φ2因此悬架侧倾角刚度C为M 1C= = B2K0 (单位:Nmm/rad) (3)Φ 2由上式可见悬架的侧倾角刚度与弹簧中心距的平方成正比,增大弹簧中心距可显著提高侧倾角刚度。
二、横向稳定杆的侧倾角刚度1、对图2所示横向稳定杆的侧倾角刚度C h按下式计算:3 E I L2C h= ,Nmm/rad (4)2﹝L13-a3+(a+b)2L/2+4L22(b+c)﹞式中E——材料的弹性模量,E=2.1×105 MpaI ——稳定杆的截面惯性矩,mm4πd4I= (5)64d——稳定杆的直径,mmL——横向稳定杆两支撑端点间的距离,mma、b、c、L1、L2等的意义见图2,mm2、对图3所示横向稳定杆的侧倾角刚度C h按下式计算:3 E I L2C h= ,Nmm/rad (6)2L23+L12L+4L22 L三、横向稳定杆的设计根据整车侧倾角刚度的需要,给出横向稳定杆的侧倾角刚度C h后,可利用式(4)或(6)和式(5)求出稳定杆的直径d ,然后要进行应力校核。
1、最大扭转应力τ一般情况下,横向稳定杆的最大扭转应力τ在截面B(见图2、图3)的内侧,其大小与B处的圆角半径R有关。
计算公式如下:16QL2 K'τ = (单位:N/mm2)(7)πd3式中K'——曲度系数4C-1 0.615K'= +(8)4C-4 CC——弹簧指数C=(2R+d)/d (9)Q——作用在稳定杆端点A的力,NC hΦQ= (10)L稳定杆的最大扭转应力τ不应超过700N/mm2,通常为了减小扭转应力,推荐圆角半径R≥1.25d。
车辆侧倾梯度分解

车辆侧倾梯度分解车辆行驶中,特别是在转弯或遇到不平路面时,车辆的侧倾就会成为一个重要因素。
侧倾会给驾驶员带来不安全感,并且会影响车辆的稳定性和操控性。
为了更好地理解车辆侧倾的原因和影响,我们需要对车辆侧倾进行梯度分解。
车辆侧倾是由于车辆在转弯时产生的离心力和重力之间的平衡失调引起的。
离心力是由车辆转弯时的惯性产生的,而重力则是车辆自身的重量。
当车辆向内转弯时,离心力会向外推动车身,使车辆产生侧倾。
而重力则会使车辆向下坠落,增加侧倾的程度。
为了更好地理解车辆侧倾的梯度分解,我们可以将车辆的侧倾分解为横向侧倾和纵向侧倾。
首先是横向侧倾。
横向侧倾是车辆在横向方向上的侧倾程度。
它是由车辆的质量、重心高度、转弯半径和速度等因素决定的。
当车辆的质量较大、重心较高、转弯半径较小或速度较高时,横向侧倾会更大。
横向侧倾会使车辆的侧向稳定性降低,容易导致侧滑或翻车的危险。
其次是纵向侧倾。
纵向侧倾是车辆在纵向方向上的侧倾程度。
它主要受到车辆的重心高度和纵向加速度的影响。
当车辆的重心较高或纵向加速度较大时,纵向侧倾会增加。
纵向侧倾会影响车辆的悬挂系统和制动系统的性能,降低车辆的牵引力和制动能力。
车辆的侧倾梯度分解是为了更好地理解侧倾的原因和影响。
通过分解梯度,我们可以更准确地评估车辆的侧倾情况,并采取相应的措施来提高车辆的稳定性和操控性。
例如,通过降低车辆的重心高度、增加车辆的悬挂刚度、调整车辆的转弯半径和减速度等方式来减小车辆的侧倾。
车辆侧倾是车辆行驶中的一个重要问题。
通过对车辆侧倾的梯度分解,我们可以更好地理解侧倾的原因和影响,并采取相应的措施来提高车辆的稳定性和操控性。
只有在加强对车辆侧倾的认识和理解的基础上,我们才能更好地应对侧倾带来的安全隐患,确保车辆行驶的稳定和安全。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( G u a n g z h o u A u t o m o b i l e G r o u p C o . ,L t d A u t o m o t i v e E n g i n e e r i n g I n s t i t u t e ,G u a n g z h n I J 5 1 O 6 4 0 ,C h i n a )
0 前 言
车身侧倾 角是制约汽车操纵稳定性和乘坐舒
适度 的重 要参 数n 。悬架 侧倾 角 刚度 的 大小对 车 身 的侧 倾 角 有 影 响 。若 侧 倾 角 刚度 过 小 ,则 侧倾 角
当汽车以 0 . 4 g的 向心 加 速 度 作 定 圆 等 速 行 驶 时 , 其 车 身侧倾倾 ;影响因素 ;灵敏度分析
中图分类号 :U 4 6 3 . 8 2 文献标识码 :A 文章编号 :1 0 0 9 —9 4 9 2( 2 0 1 3 ) 0 7—0 1 1 7 —0 4
Th e S t u d y o f t h e W a v t 0 Ro l l Co n t r o l
研 究与
DOI : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 9 - 9 4 9 2 . 2 0 1 3 . 0 7 . 0 3 3
汽车车身侧倾控制方法研究
王仲 宜 ,廖 关颖 ,谷 玉川 ,郭绍 良
( 广州汽车集团股份 有限公 司 汽车工程研究 院, 广 东广 州 5 1 0 6 4 0 )
v e h i c l e d e s i g n a n d p  ̄a me t e r o p t i mi z a t i o n . Ke y wo r d s : b o d y;r o l l ;e f f e c t e l e me n t ;s e n s i t i v i t y a n a l y s i s
g e t s s o m e p a r a me t e r w h i c h h a s b i g e f f e c t o n r o l l g r a d i e n t b y m a k e t h e s e n s i t i v i t y a n a l y s i s . We a d j u s t t h e s p r i n g s t i f f n e s s a n d s t a b i l i z e r b a r d i a me t e l ’ t o s o l v e t h e p r o b l e m t h a t t h e v e h i c l e ’S r o l l g r a d i e n t i s t o o h i g h . T h e w a y t o a d j u s t r o l l g r a d i e n t i n t h i s p a p e r i s h e l p f u l f o r n e w
本 文 以侧 倾 梯 度 来 衡 量 车 身 侧 倾 角 的大 小 ,
度 ;H簧 载质量 重心高 ( 空载) ;h 侧 倾 中心高 ( 空载 ) ; 前 悬 挂侧倾 角 刚度 ;I G 后悬 挂 侧倾 角
刚度 。在这 里 ,将 连接 前 后 悬架 侧 倾 中心 的直 线 定 义为 侧 倾 轴 线 ,如 图 1 所 示 。这样 ,绕 侧 倾 轴
由于侧倾角的大小与侧 向加速度有关 ,车身 侧 倾 角 的大小 一 般 以侧 倾 梯 度来 衡 量 。 车身 侧
倾 梯 度 为 车 身 侧 倾 角 与 侧 向加 速 度 的 比值 ,即
=
过大 ,导致乘员缺乏舒适感和安全感 ;若侧倾 角
刚度 过 大 ,则 侧倾 角过 小 ,将 导致 乘 员 缺 乏 汽 车
摘要 : 车 身侧倾 角是制约汽车操纵稳定性和乘 坐舒适性 的重要参数。以侧倾梯度来衡量车身侧倾角 的大小 ,对影响侧倾梯度的 参 数进行 了灵敏度分析 ,得 出了对侧倾 梯度 比较敏感的参数。针对某车型侧倾梯度超标 的问题 ,通过调整该车型 的弹簧刚度和
稳 定杆的直径 ,使得侧倾梯度满 足要求 。该侧 倾梯度的调整方法对新车型的开发与车辆设计参数 的优化 匹配具有一定 的指导作
Ab s t r ac t :T h e r o l l a n g e l i s i mpo r t a n t f o r t h e v e h i c l e ’S h a n d l i n g a n d c o mf o t. r T hi s p a p e r e v a l u a t e s t h e r o l l a n g e l b y t h e r o l l g r a d i e n t a n d
d  ̄ / d a 。为 获得 侧 倾力 矩 在前 、后轴 分 配 的表
侧翻时 的感觉 ,同时会 使得轮胎 的侧偏 角增 大 。 如果后轮 的侧倾角刚度过大 ,则会使得汽车增 加
过多 转 向的可 能 。
达式 ,必须对整车进行考虑。图 1 为整车侧倾梯
度 计算 示 意 图 。图 l 中 ,m簧 上质 量 ;a y 侧 向加 速