无线通信-基于u-blox高灵敏精确定位系统
UWB精确定位系统解决方案

UWB精确定位系统解决方案UWB精确定位系统是一种基于超宽带(Ultra-Wideband)技术的定位系统,可以实现高精度的定位和跟踪。
在UWB精确定位系统中,通过发送和接收极短而带宽很大的脉冲信号,利用近场传感器进行信号捕获和处理,从而实现对目标位置的精确定位。
1.脉冲发射器和接收器:脉冲发射器用于发送超短脉冲信号,而脉冲接收器则用于接收和处理收到的信号。
这些设备需要具备高带宽和低时延的特点,以满足高精度定位的需求。
2.多天线系统:为了实现精确定位,UWB系统通常采用多天线系统。
通过使用多个接收天线,可以实现信号的多径传播和多普勒效应的检测,从而提高定位精度。
3. 信号处理算法:UWB精确定位系统依赖于复杂的信号处理算法来提取脉冲信号的到达时间差(Time Difference of Arrival,简称TDOA)和多普勒效应等信息。
这些算法需要考虑信号传播路径的多样性、噪声的影响以及时延的测量等问题,以实现高精度的定位。
4.定位引擎:定位引擎是UWB精确定位系统的核心组件,用于根据接收到的信号和信号处理算法的结果计算目标的位置。
定位引擎需要具备高性能的处理能力和实时性,以满足对于高精度定位的要求。
5.定位参考点:为了实现精确的定位,UWB精确定位系统通常需要在环境中设置一些定位参考点。
这些参考点可以通过精确测量其位置坐标,并与定位引擎进行校准,从而提高整个系统的定位精度。
UWB精确定位系统可以应用于多个领域,包括室内定位、车辆定位、物体跟踪和安防监控等。
在室内定位领域,UWB精确定位系统可以利用多径传播的特点,实现对复杂环境中目标位置的高精度定位,例如用于室内导航、人员追踪和无线电子支付等应用。
在车辆定位领域,UWB精确定位系统可以实现对车辆位置的高精度定位和跟踪,可应用于自动驾驶和交通管理等领域。
在物体跟踪和安防监控领域,UWB精确定位系统可以实现对于物体位置的高精度测量和实时跟踪,可用于刑侦破案、救援搜寻和工业监控等应用。
U-Blox芯片GPS 模块的UBX协议解析与配置
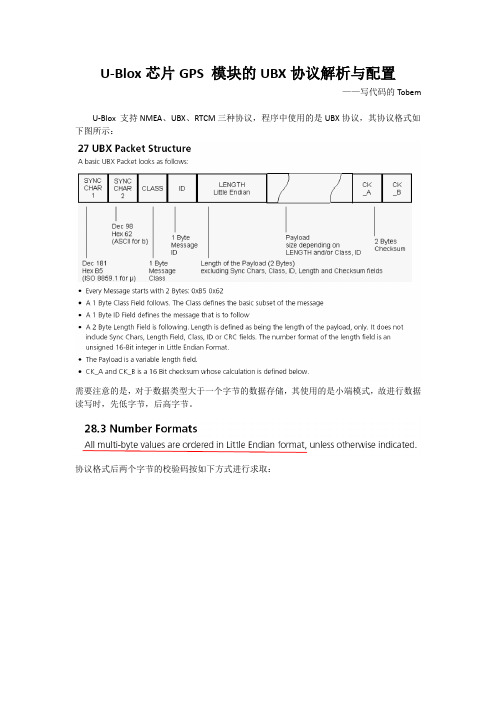
U-Blox芯片GPS 模块的UBX协议解析与配置——写代码的TobemU-Blox 支持NMEA、UBX、RTCM三种协议,程序中使用的是UBX协议,其协议格式如下图所示:需要注意的是,对于数据类型大于一个字节的数据存储,其使用的是小端模式,故进行数据读写时,先低字节,后高字节。
协议格式后两个字节的校验码按如下方式进行求取:GPS进行使用前,需进行初始化配置,主要涉及串口通信配置,将设置写入eeprom中,GPS 的更新频率、要进行转换读取的数据包等:switch(packet_count){case 1:{//配置GPS UBX协议输出,波特率为38400packet_count++;}break;case 2:{//命令存储在eeprom中packet_count++;}break;case 3:{//配置gps更新频率为4hz,导航更新为4hz,采用utc时间packet_count++;}break;case 4:{UBX_CFG_MSG_Encode(NAV_POSLLH); //配置所需数据包packet_count++;}break;case 5:{UBX_CFG_MSG_Encode(NAV_STATUS); //配置所需数据包GPS_Encode_Index = 0;packet_count++;}break;case 6:{UBX_CFG_MSG_Encode(NAV_SOL); //配置所需数据包packet_count++;}break;case 7:{UBX_CFG_MSG_Encode(NAV_VELNED); //配置所需数据包packet_count++;}break;}GPS的配置以命令形式进行,主要参考手册中的CFG的相关指令。
下面以配置GPS UBX协议输出为例,进行GPS配置命令的说明://通信协议配置void UBX_CFG_PRT_Encode(u16 Protocol_out,u32 Baudrate) //只配置输出模式和波特率(占四个字节) {write_two_byte_to_GPS_Encode_Buffer(0X0001); //目标串口1write_two_byte_to_GPS_Encode_Buffer(0X0000);write_two_byte_to_GPS_Encode_Buffer(0X08D0);write_two_byte_to_GPS_Encode_Buffer(0X0000);//配置波特率,先低字节,后高字节write_byte_to_GPS_Encode_Buffer(Baudrate%256);write_byte_to_GPS_Encode_Buffer((Baudrate%(0XFFFF+1))/256);write_byte_to_GPS_Encode_Buffer((Baudrate%(0XFFFFFF+1))/(0XFFFF+1)); write_byte_to_GPS_Encode_Buffer(Baudrate/(0XFFFFFF+1));write_two_byte_to_GPS_Encode_Buffer(0X0001); //协议输入默认为UBXwrite_two_byte_to_GPS_Encode_Buffer(Protocol_out); //输出协议格式write_two_byte_to_GPS_Encode_Buffer(0X0000);write_two_byte_to_GPS_Encode_Buffer(0X0000);}前面说到数据类型大于一字节的数据,其按小端模式进行存储,因此先写低字节,后写高字节://写2字节到编码缓存void write_two_byte_to_GPS_Encode_Buffer(u16 value){GPS_Encode_Buffer[GPS_Encode_Index++]=value; //先写低字节GPS_Encode_Buffer[GPS_Encode_Index++]=(value>>8); //后写高字节}GPS的频率配置如下,根据手册,导航频率参数设置似乎不对:UBX_CFG_RATE_Encode(250,250,Time_source_UTC); //gps测量为4hz,导航为4hz,采用utc时间程序中使用串口7中断进行GPS数据的接收,一旦还接收到数据,就将定时器7的计数清零,定时器7设置为100ms中断,假如100ms内没有数据接收到,且接收缓冲区的首地址内容非空,则认为接收完成。
uBlox GPS开发使用说明

uBlox-6M GPS开发板使用手册2013-01-281417电子工作室/宇新电子最大更新速率:<4Hz灵敏度:冷启动 -144dBm跟踪灵敏度 -160dBm捕获灵敏度 -160dBm 定位精度: Auto < 2.5mSBAS < 2m定时精度: RMS 30ns99% <60ns极限速度: 500m/s运行温度: -40~85℃封装尺寸: 16 × 12.2 × 2.4 mm1.5.3电气性能:工作电压: 2.7V~3.6V功耗:全速模式**********ECO 模式**********备用电池: 1.4V~3.6V,25uA1.5.4接口协议:串行接口: 1 UART1 USB V2.0 全速12Mbit/s1 IIC1 SPI其他接口: 1 时间脉冲输出1 外部中断输入协议: NMEA,UBX二进制1.5.5 芯片引脚引脚定义:沟通无止境 合作有乾坤 8 / 37 技术热线QQ :563216330第二章 开发板硬件介绍2.1 实物图2.2 结构布局开发板尺寸:35*65mm天线SMA 座电源开关电源指示灯5V 转3.3V 芯片 1117I2C 接口 USB 接口80mA 自恢复 保险 DC5V 插座 USB 选择 MS621充电电池uBlox-6M 装配孔PPS 指示灯 DB9 孔座: RS232 主要接计算机或单片开发板CMOS 串口接口,譬如:ARM 2440TTL 串口 接口 5V 的单片机 SPI 接口 TX 指示灯 RX 指示灯2.3 接口说明2.3.1 接口说明表标号名称说明1NEO-6M主芯片NEO-6M主芯片2电源输入DC5V输入2.3.2 I/O接口表第三章上位机软件使用说明3.1 连接方式沟通无止境合作有乾坤9 / 37技术热线QQ:5632163303.2 使用串口调试助手1.打开光盘中的串口调试助手软件(uartassist.exe),根据自己电脑的实际串口选择串口号,默认的是COM1(我电脑的串口号是COM4)波特率:9600校验位:NONE数据位:8停止位:1设置好串口属性后,点击“打开”按钮,打开串口。
MAX-M10S u-blox M10高精度GNSS模块数据手册说明书

MAX-M10Su-blox M10 standard precision GNSS moduleData sheetAbstractThis document describes the features and application of the MAX-M10S,an ultra-low-power GNSS receiver for high-performance asset-trackingdevices.UBX-20035208 - R01C1-PublicDocument informationTitle MAX-M10SSubtitle u-blox M10 standard precision GNSS moduleDocument type Data sheetDocument number UBX-20035208Revision and date R0121-Dec-2020 Document status Objective specificationDisclosure restriction C1-PublicProduct status Corresponding content statusIn development /Objective specification Target values. Revised and supplementary data will be published later. prototypeEngineering sample Advance information Data based on early testing. Revised and supplementary data will bepublished later.Initial production Early production information Data from product verification. Revised and supplementary data may bepublished later.Mass production /Production information Document contains the final product specification.End of lifeThis document applies to the following products:Product name Type number Firmware version PCN referenceMAX-M10S MAX-M10S-00B-00SPG 5.00N/Au-blox reserves all rights to this document and the information contained herein. Products, names, logos and designs described herein may in whole or in part be subject to intellectual property rights. Reproduction, use, modification or disclosure to third parties of this document or any part thereof without the express permission of u-blox is strictly prohibited. The information contained herein is provided "as is" and u-blox assumes no liability for the use of the information. No warranty, either express or implied, is given with respect to, including but not limited to, the accuracy, correctness, reliability and fitness for a particular purpose of the information. This document may be revised by u-blox at any time. For most recent documents, please visit www.u .Copyright © 2020, u-blox AG.u-blox is a registered trademark of u-blox Holding AG in the EU and other countries.Contents1 Functional description (4)1.1 Overview (4)1.2 Performance (4)1.3 Supported GNSS constellations (5)1.4 Supported protocols (6)1.5 Firmware features (6)2 System description (7)2.1 Block diagram (7)3 Pin definition (8)3.1 Pin assignment (8)4 Electrical specification (10)4.1 Absolute maximum ratings (10)4.2 Operating conditions (10)4.3 Indicative power requirements (11)5 Communication interfaces (13)5.1 UART (13)5.2 I2C (13)5.3 Default interface settings (13)6 Mechanical specification (14)7 Labeling and ordering information (15)7.1 Product labeling (15)7.2 Explanation of product codes (15)7.3 Ordering codes (15)Related documents (17)Revision history (18)1 Functional description1.1 OverviewThe MAX-M10S module features the u-blox M10 standard precision GNSS platform and provides exceptional sensitivity and acquisition times for all L1 GNSS signals.The extremely low power consumption in continuous tracking mode allows great power autonomy for all battery-operated devices, such as asset trackers, without compromising on GNSS performance.The MAX-M10S supports concurrent reception of up to four GNSS (GPS, GLONASS, Galileo, and BeiDou). The high number of visible satellites enables the receiver to select the best signals. This maximizes the position accuracy, in particular under challenging conditions such as in deep urban canyons. In the firmware described here, however, the number of concurrently received GNSS is limited to three. u-blox Super-S (Super-Signal) technology offers great RF sensitivity.The MAX-M10S integrates an LNA followed by a SAW filter in the RF path for maximum sensitivity in passive antenna designs.The MAX-M10S offers backwards pin-to-pin compatibility with products from the previous u-blox generations, which saves the designer's effort and reduces costs when upgrading designs.The MAX-M10S is based on the u-blox M10 GNSS chip, which is qualified according to AEC-Q100, manufactured in IATF 16949 certified sites, and fully tested on a system level.1.2 PerformanceParameter SpecificationReceiver type u-blox M10 receiverAccuracy of time pulse signal RMS99%30 ns60 nsFrequency of time pulse signal 0.25 Hz to 10 MHz (configurable)Operational limits1Dynamics≤ 4 gAltitude80,000 mVelocity500 m/sVelocity accuracy20.05 m/sDynamic heading accuracy20.3 degGNSS GPS+GAL GPS+GLO GPS+BDS GPS+GLO+GAL GPS+GAL+BDSAcquisition3Cold startHot startAided start429 s1 s1 s26 s1 s1 s27 s1 s1 s24 s1 s1 s27 s1 s1 sNav. update rate PVT10 Hz10 Hz10 Hz10 Hz10 Hz1Assuming Airborne 4 g platform250% at 30 m/s for dynamic operation3Commanded starts. All satellites at -130 dBm. GPS always in combination with QZSS and SBAS. Measured at room temperature.4Dependent on the speed and latency of the aiding data connection, commanded starts.GNSS GPS+GAL GPS+GLO GPS+BDS GPS+GLO+GAL GPS+GAL+BDSSensitivity5Tracking and nav.ReacquisitionCold startHot start -166 dBm-160 dBm-148 dBm-160 dBm-167 dBm-160 dBm-148 dBm-160 dBm-167 dBm-160 dBm-148 dBm-160 dBm-167 dBm-160 dBm-148 dBm-160 dBm-166 dBm-160 dBm-148 dBm-160 dBmPosition accuracy PVT 2 m CEP 2 m CEP 2 m CEP 2 m CEP 2 m CEP Table 1: MAX-M10S typical performance in multi-constellation GNSS modesGNSS GPS GLONASS BEIDOU GALILEOAcquisition3Cold startHot startAided start429 s1 s1 s27 s1 s1 s30 s1 s1 s38 s1 s5 sNav. update rate PVT18 Hz18 Hz18 Hz18 HzSensitivity5Tracking and nav.ReacquisitionCold startHot start -166 dBm-160 dBm-148 dBm-160 dBm-166 dBm-154 dBm-147 dBm-156 dBm-160 dBm-158 dBm-146 dBm-159 dBm-159 dBm-154 dBm-141 dBm-154 dBmPosition accuracy PVT 2 m CEP 4 m CEP 3 m CEP 3 m CEPTable 2: MAX-M10S typical performance in single-GNSS modes1.3 Supported GNSS constellationsThe MAX-M10S is a concurrent GNSS receiver which can receive and track multiple GNSS systems. The single RF front-end architecture enables all major GNSS constellations to be received concurrently. The receiver can be configured for a sub-set of GNSS constellations to achieve lower power consumption.The following GNSS and their signals are supported:System SignalsGPS L1C/A (1575.42 MHz)Galileo E1-B/C (1575.42 MHz)GLONASS L1OF (1602 MHz + k*562.5 kHz, k = –7,..., 5, 6)BeiDou B1I (1561.098 MHz)Table 3: Supported GNSS and signals on MAX-M10SThe following GNSS assistance services are supported:Service SupportAssistNow™ Online SupportedAssistNow™ Offline SupportedAssistNow™ Autonomous SupportedTable 4: Supported Assisted GNSS (A-GNSS) servicesThe following augmentation systems are supported:5Demonstrated with a good external LNA. Measured at room temperature.System SupportSBAS EGNOS, GAGAN, MSAS and WAASQZSS L1S (SLAS)Table 5: Supported augmentation systemsThe augmentation systems SBAS and QZSS can be enabled only if GPS operation is also enabled.1.4 Supported protocolsThe MAX-M10S supports the following protocols:Protocol TypeUBX Input/output, binary, u-blox proprietaryNMEA versions 2.1, 2.3, 4.0, and 4.10. (default 4.10)Input/output, ASCIITable 6: Supported protocols1.5 Firmware featuresFeature DescriptionAntenna supervisor6Active antenna supervisor to detect short and open statusAssisted GNSS AssistNow Online, AssistNow Offline and AssistNow Autonomous supported Backup modes Hardware backup mode, hardware standby mode, software standby mode (similar toolder software backup mode), all with optional RTCData batching Autonomous tracking up to 5 minutes at 1 HzOdometer Measure traveled distance with support for different user profilesTable 7: Firmware featuresFeature DescriptionAnti-jamming RF interference and jamming detection and reporting; Active GNSS in-band filtering Anti-spoofing Spoofing detection and reportingMessage integrity All messages are cryptographically signed, JTAG debug interface disabled by default Table 8: Security features6External components required, some pins need to be reprogrammed as needed.2 System description2.1 Block diagramFigure 1: MAX-M10S block diagramThe GPIOs can be programmed for different uses like external interrupt, enable LNA, TX ready, data batching indicator, and antenna supervisor.3 Pin definition3.1 Pin assignmentThe pin assignment of the MAX-M10S module is shown below:Figure 2: MAX-M10S pin assignmentPin PIO no.I/O Description1GND--Connect to GND2TXD1O UART TX3RXD0I UART RX4TIMEPULSE4O Time pulse signal5EXTINT5I External interrupt6V_BCKP-I Backup voltage supply7V_IO-I IO voltage supply8VCC-I Main voltage supply9RESET_N-I System reset (active low)10GND--Connect to GND11RF_IN-I GNSS signal input12GND--Connect to GND13LNA_EN-O On/Off external LNA or active antenna 14VCC_RF-O Output voltage RF section15Reserved--Reserved16SDA2I/O I2C data17SCL3I I2C clockPin PIO no.I/O Description18SAFEBOOT_N-I Safeboot mode (leave OPEN) Table 9: MAX-M10S pin assignment4 Electrical specificationThe limiting values given are in accordance with the Absolute Maximum Rating System(IEC 134). Stress above one or more of the limiting values may cause permanent damageto the device. These are stress ratings only. Operation of the device at these or at any other conditions above those given below is not implied. Exposure to limiting values for extended periods may affect device reliability.Where application information is given, it is advisory only and does not form part of thespecification.4.1 Absolute maximum ratingsSymbol Parameter Min Max UnitVCC Supply voltage–0.3 3.6VVoltage ramp on VCC72535000µs/VV_IO Supply voltage, I/O–0.3 3.6VVoltage ramp on V_IO72535000µs/VV_BCKP Supply voltage, backup domain–0.3 3.6VVoltage ramp on V_BCKP725µs/VVin Input voltage, digital pins–0.3V_IO + 0.3V(max 3.6)Ipin Max source / sink current, digital pins8-1010mAICC_RF Max source current, VCC_RF100mAP rfin RF input power on RF_IN9+15dBmT amb Ambient temperature–40+85°CT s Storage temperature–40+85°CTable 10: Absolute maximum ratingsThe product is not protected against overvoltage or reversed voltages. Voltage spikesexceeding the power supply voltage specification, given in the table above, must be limited to values within the specified boundaries by using appropriate protection diodes.4.2 Operating conditionsTable 11shows the general operating conditions. Table 12shows the electrical parameters for digital I/O.Symbol Parameter Min Typical Max UnitsVCC Supply voltage 2.7 3.0 3.6VV_IO Supply voltage, I/O 2.7 3.0 3.6VV_BCKP Supply voltage, backup domain 1.65 3.6VVCC_RF VCC_RF output voltage VCC-0.1VICC_RF VCC_RF output current50mANF tot Receiver chain noise figure2dB7Exceeding the voltage ramp speed may permanently damage the device.8SAFEBOOT_N pin has an internal 1 kΩ series resistor. With a 3.3 V supply, the current is limited to 3.3 mA.9Test conditions TBCSymbol Parameter Min Typical Max UnitsExt_gain10External gain at RF_IN, low gain mode (default)TBD dBExternal gain at RF_IN, bypass mode TBD dBT opr Operating temperature-40+85°CTable 11: General operating conditionsSymbol Parameter Min Typical Max UnitsV in Input pin voltage range0V_IO VV il Low-level input voltage0.63VV ih High-level input voltage0.68 x V_IO VV ol Low-level output voltage, Iout = -2 mA0.4VV oh High-level output voltage, Iout = 2 mA V_IO - 0.4VR pu, IO Pull-up resistance, Digital IO1151772kΩR pu, SAFEBOOT_N Pull-up resistance, SAFEBOOT_N1251772kΩR pu, RESET_N Pull-up resistance, RESET_N71013kΩTable 12: Digital IOOperation beyond the specified operating conditions can affect device reliability.To trigger a reset, the minimum low period for RESET_N is 1 ms.4.3 Indicative power requirementsTable 13 lists examples of the total system supply current for VCC and V_IO. Table 14 shows current consumptions for the backup modes.These values are provided for customer information only, as an example of typical current requirements. They are characterized on samples using a cold start command. Actualpower requirements can vary depending on FW version used, external circuitry, number of satellites tracked, signal strength, type and time of start, duration, internal LNA gain mode, and test conditions.Symbol Parameter Conditions GPS GPS+GAL GPS+GAL+GLO GPS+GAL+BEIUnitI PEAK Peak current Acquisition25252525mAAcquisition 6.57.09.010.5mA I VCC13Current at VCCTracking(Continuous mode)6.0 6.07.08.0mAAcquisition 2.2 2.2 2.3 2.3mA I V_IO14Current at V_IOTracking(Continuous mode)2.2 2.2 2.3 2.3mA Table 13: Typical currents to calculate the indicative power requirementsSymbol Parameter Conditions Typ.Unit I V_BCKP Total current in hardware backup mode V_BCKP = 3.3 V / V_IO = VCC = 0 V32µA 10The internal LNA gain is configurable.11TXD, RXD, TIMEPULSE, EXTINT, SCL, SDA, and LNA_EN.12The SAFEBOOT_N pin has an additional 1 kΩ series resistor.13Voltage at VCC = 3.0 V. Internal LNA set to low gain. Simulated signal using power levels of -130 dBm.14Voltage at V_IO = 3.0 V.Symbol Parameter Conditions Typ.Unit Total current in hardware standby mode V_IO = 3.3 V / VCC = 0 V46µAI VCC, V_IO15Total current in software standby mode V_IO = 3.3 V / VCC = 3.3 V TBDµA Table 14: Backup currents to calculate the indicative power requirementsAll values in Table 13 and Table 14 are measured at 25 °C ambient temperature and with the internal LNA set to low gain.SBAS and QZSS are activated in all measurements.15I VCC, V_IO includes currents flowing into VCC and V_IO.5 Communication interfacesThe receiver allows communication over UART and I2C16 interface.All the inputs have internal pull-up resistors in normal operation and can be left open if not used. All the PIOs are supplied by V_IO, therefore all the voltage levels of the PIO pins are related to V_IO supply voltage.5.1 UARTThe UART interface supports configurable baud rates. Hardware flow control is not supported.Symbol Parameter Min Max UnitR u Baud rate4800921600bit/sΔTx Tx baud rate accuracy-1%+1%-ΔRx Rx baud rate tolerance-2.5%+2.5%-Table 15: UART specifications5.2 I2CAn I2C-compliant interface is available for communication with an external host CPU. The interface is compatible with the Fast-mode of the I2C industry standard, allowing a maximum bit rate of 400 kbit/s17.5.3 Default interface settingsInterface SettingsUART•9600 baud, 8 bits, no parity bit, 1 stop bit.•Input messages: NMEA and UBX.•Output messages: NMEA GGA, GLL, GSA, GSV, RMC, VTG and TXT.I2C•7-bit I2C address (0x42).•Input messages: NMEA and UBX.•Output messages: NMEA GGA, GLL, GSA, GSV, RMC, VTG and TXT.Table 16: Default interface settings16I2C is a registered trademark of Philips/NXP.17External pull-up resistors are needed to achieve 400 kbit/s communication speed as the internal pull-up resistance can be very large.6 Mechanical specificationFigure 3: MAX-M10S mechanical drawing7 Labeling and ordering informationThis section provides information about product labeling and ordering.7.1 Product labelingThe labeling of the MAX-M10S package provides product information and revision information. For more information contact u-blox sales.Figure 4: Location of product type number on MAX-M10S label7.2 Explanation of product codesThree product code formats are used. The Product name is used in documentation such as this data sheet and identifies all u-blox products, independent of packaging and quality grade. The Ordering code includes options and quality, while the Type number includes the hardware and firmware versions.Table 17 details these three different formats for the MAX-M10S.Format Structure Product codeProduct name PPP-TGGV MAX-M10SOrdering code PPP-TGGV-NNQ MAX-M10S-00BType number PPP-TGGV-NNQ-XX MAX-M10S-00B-00Table 17: Product code formatsThe parts of the product code are explained in Table 18 .Code Meaning ExamplePPP Product family MAXTGG Platform M10 = u-blox M10V Variant S = Standard precision, ROM, LNA, and SAW filterNNQ Option / Quality grade NN: Option [00...99]Q: Grade, A = Automotive, B = ProfessionalXX Product detail Describes hardware and firmware versionsTable 18: Part identification code7.3 Ordering codesOrdering code Product RemarkMAX-M10S-00B u-blox MAX-M10S module, professional gradeTable 19: Product ordering codesProduct changes affecting form, fit or function are documented by u-blox. For a list ofProduct Change Notifications (PCNs) see our website at: https:///en/product-resources.UBX-20035208 - R017 Labeling and ordering information Page 16 of 19Related documents[1]MAX-M10S Integration manual, UBX-20053088[2]u-blox M10 SPG 5.00 Interface description, UBX-20048810For regular updates to u-blox documentation and to receive product change notifications please register on our homepage https://.UBX-20035208 - R01Related documents Page 17 of 19Revision historyRevision Date Name Status / comments 0121-Dec-2020imar, jesk, msul, rmak Objective specificationContactFor complete contact information visit us at .u-blox OfficesNorth, Central and South America Headquarters Asia, Australia, PacificEurope, Middle East, Africau-blox America, Inc.u-blox AG u-blox Singapore Pte. Ltd.Phone:+1 703 483 3180Phone:+41 44 722 74 44Phone:+65 6734 3811E-mail:******************E-mail:***************E-mail:******************Support:******************Support:********************* Regional Office West Coast Regional Office AustraliaPhone:+1 408 573 3640 Phone:+61 3 9566 7255E-mail:****************** E-mail:*******************Support:********************* Technical Support Regional Office China (Beijing) Phone:+1 703 483 3185 Phone:+86 10 68 133 545E-mail:********************* E-mail:******************Support:********************* Regional Office China (Chongqing) Phone:+86 23 6815 1588E-mail:******************Support:********************* Regional Office China (Shanghai)Phone:+86 21 6090 4832E-mail:******************Support:********************* Regional Office China (Shenzhen) Phone:+86 755 8627 1083E-mail:******************Support:********************* Regional Office IndiaPhone:+91 80 4050 9200E-mail:******************Support:********************* Regional Office Japan (Osaka)Phone:+81 6 6941 3660E-mail:******************Support:********************* Regional Office Japan (Tokyo)Phone:+81 3 5775 3850E-mail:******************Support:********************* Regional Office KoreaPhone:+82 2 542 0861E-mail:******************Support:********************* Regional Office TaiwanPhone:+886 2 2657 1090E-mail:******************Support:*********************。
ublox模块命名规则

ublox模块命名规则u-blox模块命名规则目录1. 引言2. 品牌命名规则3. 产品系列命名规则4. 产品命名规则5. 电信运营商认证相关命名规则6. 小结1. 引言u-blox是一家跨国公司,专注于提供全球导航卫星系统(GNSS)和无线通信技术。
作为一个知名的模块供应商,u-blox的模块被广泛应用于各种设备中,如智能手机、车载导航系统、智能物联网设备等。
模块的命名规则对于识别和选择合适的模块非常重要。
本文将详细介绍u-blox模块的命名规则。
2. 品牌命名规则u-blox的品牌命名规则遵循一定的规范。
在产品命名中,u-blox通常会在产品名称前添加品牌标识,以提高品牌识别度。
通常情况下,品牌标识为"u-",表示u-blox品牌。
3. 产品系列命名规则u-blox的产品系列命名规则是根据不同的产品功能和应用领域而设计的。
每个产品系列都有一个独特的名称,用于描述该系列所具备的主要特点。
以下是一些常见的u-blox产品系列名称和其主要特点的示例:- NEO系列:NEO系列代表了u-blox的GNSS定位模块产品系列。
这些模块具备高精度定位功能和低功耗特性,适用于各种导航和定位应用。
- SARA系列:SARA系列代表了u-blox的无线通信模块产品系列。
这些模块具备全球通信能力和低功耗特性,适用于物联网应用。
- M8系列:M8系列代表了u-blox的高精度GNSS定位和时间同步模块产品系列。
这些模块具备更高的定位精度和时间同步能力,适用于要求更高精度的应用。
4. 产品命名规则u-blox的产品命名规则通常遵循以下格式:品牌标识+产品系列名称+代码后缀。
其中,品牌标识为"u-",产品系列名称代表了该产品所属的系列,而代码后缀则用于区分不同的产品型号。
产品型号的代码后缀通常包含一些关键信息,如模块封装、接口类型、支持的功能和硬件版本等。
下面是一些常见的代码后缀示例:- N2:表示产品采用SMD封装。
U-blox公司产品波特率修改及与单片机接口参数应用

-blox公司产品波特率修改及与单片机接口参数应用:瑞士u-blox公司提供的专业测试软件u-center,不但是专业级别的测试软件,而且可以对u-blox公司的模块进行相应的模块功能设置,功能强大,我们将为你介绍部分常用的相关与模块接口的使用功能.以下介绍的是通过u-blox公司的UBX协议来配合u-center软件来对u-blox公司的GPS模块进行模块的设置参数更改,UBX格式是u-blox公司独家开发且应用于所有自产的模块中的可支持的通信协议,UBX格式具体说明资料可以在本站内进行下载.以下主要内容包括:利用u-center软件来修改GPS模块的波特率通过单片机来进行模块的操作休眠模块的设定及唤醒u-blox 模块4Hz刷新频率更改(TIM-LR/4R除外)u-blox 模块NMEA精简字符信息输出u-blox 模块冷启动时间TTFF测试刷新友情提示:对于以下内容中提及的所有问题,若使用为特殊的高规格场合,且不考虑成本问题,我们建议客户选用LEA-4H/5H模块利用u-center软件来修改GPS模块的波特率:第一步: 以飞扬科技的TIIM-4H评估测试主板套件为例,连接好相关硬件并打开u-center软件并设置好COM口及9600的初始波特率出现如下界面:第二步: 在顶部栏目状态栏中选中模块配置修改框如下图所示:第三步: 将出现下图所示的栏目框,是u-blox针对于模块进行的配置参数选项,选择UBX>>CFG(config)>>PRT(ports),默认的波特率是9600,如上图所示你可以根据需要修改相应的波特率在下拉菜单中进行选择,例如我们计划选用通信波特率为57600,请在Baudrate中选择57600,并请按底部的SEND按钮对模块进行命令发送:第四步: 选择完新的波特率之后,我们再在主栏目中选择当前选择新的波特率57600进行实时通信,如下图所示:第五步: 我们现在已经使用了新设置的57600的波特率进行通信,但如果要掉电保存在模块的FLASH当中还需要对当前的信息进行操作,下次模块断电启动后便可从模块的FLASH(或E2PROM)当中读取新设置的波特率了,请选择栏目框当中的: UBX>>CFG(config)>>CFG(configuration)选项中,墨认为: save current configuration 选项,这是进行保存设置的选项然后我们再次在底部的状态栏再次选择SEND对模块进行保存指令的发送好棒,我们的波特率设置就完成了,现在再重新启动u-center软件,你会发现现在通信已经是新设置的波特率了.关于以上波特率适合于u-blox模块系列的修改事宜:不过,我们的设置是钟对于飞扬科技的TIM-4H板为例,因为u-blox的模块的存储器分为几种:ROM版本,例如LEA-4S/4A,TIM-4S/4A系列E2PROM版本,如新出的LEA-4S-1,TIM-4S-18M Flash的版本,如LEA-4H/4P/LH/LP,TIM-4H/4P/LH/LPE2PROM版本及FLASH版本是可以通过u-center软件来完成配置及修改,但ROM版的如LEA-4S/4A及TIM4S/4A系列,内部是没有FLASH的,而这几个版本在中国为大多数客户选用,而且将涉及到调整波特率的问题,那么改变参数的方法如下:第一种方式需要通过外围的引脚定义接线来硬件配置波特率及启动参数等相对较常用的配置,这些内容可以参考u-blox的原厂的模块PDF文档第二种方式是每次在机器一开始运行时,便选用单片机来对模块进行控制,给模块的串口通信端发送相应的代码来控制不同的波特率,关于用单片机来控制当前模块的通信波特率,请参考以下章节:通过单片机来进行模块的操作现在客户更关心的问题是怎么样利用单片机或其它系统来对模块进行操作,最常见的就是对模块进行冷启动什么情况下进行冷启动呢?一是客户客观的需要,二是有时比如在信号特别差的地方,很久都没有办法收到GPS信号,有时转换地点也不行,这时候选用冷启动运行新的搜星定位反而会令到启动速度更快,在这种情况之下有些客户便选择冷启动让模块重新查找星系定位,设置方法如下:第一部: 在状态栏当中选择: UBX>>CFG(config)>>Startup option以在Startup option中,将会有热启动,温启动,冷启动三个选项,分别对应三种不同的启动方式,我们选择三种模式就会发现在蓝色框当中的16进制代码会发生相应的变化,注意蓝色框当中的红色框,那段代码是对模块启动控制三种方式的16进制代码,这些代码将是我们利用单片机对模块进行控制所需要用到的内容第二步:我们选中红色栏目当的内容,将红色框内的16进制代码通过单片机对模块的UART通信端口进行发送,发送三种不同的代码就可以通过单片机来控制GPS模块的热启动,温启动,冷启动三个状态了.好了,到这里大家对使用获取的代码来控制u-blox公司的GPS模块有一定的概念了,我们再回过来讲比较复杂的开机冷启动时配置ROM版本的LEA-4A/4S及TIM-4A/4S的波特率问题:关于用单片机控制ROM版本的LEA-4A/4S及TIM-4A/4S模块波特率的实例:第一步: 在状态栏当中选择: UBX>>CFG(config)>>PRT(ports),在Baudrate中选择不同的参数就会有不同的波特率,注意蓝色方框的代码变化第二步: 选择需要的波特率,提取蓝色方框中的红色框内的16进制代码,用单片机对模块的UART端口进行数据发送,上面谈到是在机器冷启动的时候便开始发送,模块便开始在当前的波特率下进行通讯工作.另外,若是以蓝牙等形式没有单片机等相连的直接发送模块的方式,也需要使用波特率设置,可以用上页中提到的用硬件外接跳线的方式设置波特率.休眠模块的设定及唤醒接下来我们再补充一下大家关心的休眠模式的设定:我们找到UBX--->CONFIG--->FXN(Fix Now Mode)1. 在如下设置窗口,设置参数,具体各个参数的作用,请参看我们的系统集成手册62~65示意图解释。
ublox f9p参数

ublox f9p参数u-blox F9P是一种高精度GPS技术,主要用于测量和定位,其参数和配置可以根据应用和需求进行调整和定制。
这篇文档将介绍u-blox F9P的一些关键参数及其解释和配置方法。
1. 位置精度位置精度是指GPS信号接收器确定其当前位置的准确程度。
在u-blox F9P中,位置精度通常表示为CEP(圆形误差概率)。
CEP值表示在一定时间内,接收器可以在其精度圆内发现95%的时间。
因此,CEP值越小,位置精度越高。
u-blox F9P的位置精度可以通过调整接收器的天线高度,增加接收器的GPRS数量和减少多路径影响来提高。
2. 精度评估高精度定位系统需要评估当前的定位精度,并为下一步精度评估做好准备。
u-blox F9P提供多种评估指标,包括位置可靠性,垂直精度保持,水平误差估计,时间同步等。
这些指标可以帮助用户评估当前的精度,并决定是否需要调整配置。
3. 数据频次u-blox F9P的速度和位置数据频次是指GPS频率,通常为1HZ。
用户可以根据应用需求提高或降低速度数据频次。
频次越高,精度越高,采样时间越短。
频次越低,成本更低,但采样时间更长,精度更低。
用户需要在应用需求和成本之间做出权衡。
4. 坐标系坐标系是指地球表面坐标系统,用于确定GPS接收器的准确位置。
UBlox F9P支持多个坐标系,包括WGS84和ETRS89等。
用户应选择适合其应用程序和地理位置的最佳坐标系。
5. 时钟精度时钟精度是指GPS信号接收器用于测量时间的准确程度。
u-blox F9P的内部时钟精确度可以在软件中确认,也可以根据实际应用要求进行调整。
高精度应用程序可能需要更精确的时钟精度,而低成本应用程序可能需要较高噪声时钟精度来节省成本。
6. 天线类型u-blox F9P支持各种天线类型,例如内置天线,外置天线和芯片天线等。
不同的天线类型适用于不同的应用程序,例如室内或室外环境,防水要求等。
用户应选择适合应用程序和需求的最佳天线类型。
ublox协议格式

ublox协议格式(最新版)目录1.UBLOX 协议简介2.UBLOX 协议的格式3.UBLOX 协议的组成部分4.UBLOX 协议的应用5.UBLOX 协议的优势正文【UBLOX 协议简介】UBLOX(Universal Binary Loaded)协议是一种二进制加载协议,主要用于卫星导航接收器和全球定位系统(GPS)设备之间的通信。
这种协议的优势在于其通用性和高效性,能够实现数据在不同设备和系统之间的无缝传输。
【UBLOX 协议的格式】UBLOX 协议采用二进制格式,其数据结构包括三个部分:导航数据、电文校验和(CRC)和附加数据。
这种结构使得数据传输更加高效,同时保证了数据的完整性和准确性。
【UBLOX 协议的组成部分】1.导航数据:包括卫星信号、星历数据、卫星健康状态和导航电文等内容。
这些数据为接收器提供了卫星导航信息,以便实现精确的定位和导航功能。
2.电文校验和(CRC):用于检测数据传输中的错误。
接收器在接收到数据后,会通过计算 CRC 来验证数据的完整性。
如果 CRC 校验失败,说明数据传输可能出现了错误。
3.附加数据:包括抬头信息、数据传输速率和数据传输方向等内容。
这些数据用于描述导航数据的传输特性,以便接收器进行解调、解码和处理。
【UBLOX 协议的应用】UBLOX 协议广泛应用于各种卫星导航设备中,如 GPS 接收器、惯性导航系统、航空电子设备等。
这些设备通过 UBLOX 协议接收和处理卫星导航数据,实现高精度的定位和导航功能。
【UBLOX 协议的优势】1.通用性:UBLOX 协议支持多种卫星导航系统,如 GPS、GLONASS、GALILEO 等,能够实现数据的通用传输。
2.高效性:采用二进制格式的数据传输,使得 UBLOX 协议在数据传输过程中具有较高的效率。
3.可靠性:通过电文校验和(CRC)机制,UBLOX 协议能够有效检测和纠正数据传输中的错误,保证数据的完整性和准确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于u-blox高灵敏精确定位系统王丽秋(长春光学精密机械与物理研究所,吉林 长春 130033)摘要:为了在阴云天气条件下也能快速获得理想的GPS定位结果,设计了高精度精确定位系统。
该系统基于瑞士u-blox公司最新出品的以u-blox5定位引擎为核心的LEA-5芯片,利用KickStart技术和SuperSense®技术,提出了高灵敏精确定位系统的硬件结构设计方案,详细介绍了射频电路的设计和要点,介绍了电路板布线经验,最后提供了样机图片以供读者参考。
实践证明,该系统即使在阴云天气下也可以做到搜星3颗以上,定位时间在十几秒钟,定位精度达到十几米~几米内[1]。
关键词:精确定位;射频电路;u-blox中图分类号:TP311.11 文献标识码:BThe Higyly Sensitive and Precision Navigation System Based on u-bloxWang, liqiu(Changchun Institute of Optics, Fine Mechanics and Physics,Jilin Changchun 130033) Abstract: In order to get an ideal location result by GPS under cloudy weather quickly, the higyly sensitive and precision location system was designed. The system based on chip of LEA-5 by using KickStart and SuperSense® technique which has location engine of u-blox5 and from u-blox corporate of Switzerland.The hardware structure of higyly sensitive and precision location system was designed, the main points of design of RF was discussed in detail,the experience of the board routing was introduced.At last,the photo of sample machine was presented. The practice has proved that the system can seek out 3 stars upwards,it has position result of time_to_fix <20s and horizontal position accuracy is under decade meters. Keywords: Precision Location, RF, u-blox;1.引言瑞士u-blox公司是世界著名GPS芯片厂商之一,目前已是全球定位芯片厂商中继美国Sirf之后的第二大生产设计商,其产品系列齐全、功能完备,其设计出品的导航芯片和模块体积小、功耗低、灵敏度高、信号捕获速度快,其产品除支持标准NMEA Protocol可与行业标准兼容外,还额外提供该公司自定义通信协议 UBX Protocol, UBX Protocol可为用户提供较标准NMEA Protocol更全面更细致的信息,使用户可以更多地拓展应用空间以便获得更精确更快速的定位。
2.U-BLOX介绍2.1 芯片/模块型号及特点u-blox定位产品涵盖了芯片、模块、板卡、天线及相关的测试设备和手段。
该公司以自行设计的GPS定位引擎ANTARIS® 、 ANTARIS® 4 和近期推出的 u-blox5为核心推出各类产品,包括芯片UBX-G5010系列、芯片组UBX-G5000系列、芯片组UBX-G0010系列、模块NEO系列、模块LEA系列、模块TIM系列等。
借助该公司的KickStart技术,其产品可以实现超快速弱信号捕获,即使在微弱信号条件下也可实现高速捕获,在天线受限时能实现较高性能,并能实现天线隐蔽式应用。
u-blox的SuperSense®室内技术存在于u-blox5引擎和ANTARIS®4引擎,可实现高灵敏度跟踪(跟踪灵敏度达到-160dBm)、高精确度定位。
此外精确授时和惯性导航技术还可以实现补偿后达15ns授时精度和不间断导航。
2.2 UBX Protocol[2]UBX Protocol是U-Blox公司私有GPS通信协议,标准UBX包的结构由两个字节的头部标识字(SYNC1、SYNC2)、两个字节的类标识(class、ID)、两个字节的负载长度(低端有效数据)、负载数据和两个字节的校验和。
通过UBX message除可以获得标准定位结果信息(NAV message of UBX class 提供了导航结果:包括位置、速度、时间、精度、可用卫星数等信息)外,还可以得到接收机信息(RXM message of UBX class提供接收机至卫星的伪距、信噪比、通道状态等)、导航辅助信息(如AID message of UBX class提供卫星的星历、历书信息)等,最值得一提的是,UBX可以提供接收机获得的各种捕获信号原始数据[3](如RXM-RAW message of UBX class 为用户提供原始的载波相位信息),这在众多GPS芯片厂商中是比较罕见的。
此外,用户可以通过修改和发送CFG消息来配置模块的工作方式和发送的信息内容(如通讯波特率、通讯接口选择、输出信息选定、数据发送频率等)。
3.高灵敏精确定位系统设计3.1 LEA-5[4,5]LEA-5是第五代定位引擎u-blox 5产品,这个预留有GALILEO功能的GPS定位引擎,接收GPS L1 C/A码信息,具有50个通道(32通道高性能捕获引擎和超高精度18通道跟踪引擎)、一百多万个相关器,捕获性能小于1秒(TTFF),SuperSense技术令其捕获跟踪灵敏度可达到-160dBm, 具备KickStart功能可实现微弱信号加速启动,抗干扰能力强,定位更新速率达到4Hz,定位精确度为2.5CEP。
该芯片内部包含射频前端和基带处理部分(内含ARM7 CPU),集成有LDO和LNA,无需外接Flash EPROM,支持标准晶体振荡器和温度补偿晶体振荡器,并可对Flash EPROM进行固件升级。
3.2 电路系统组成[6,7]LEA-5模块由上下两部分组成,上半部分为射频、下半部分为基频。
高灵敏精确定位电图1 系统结构图路系统由射频接口、保护电路、USB接口、主处理器(MSP430F449)[8]、串行接口电路、LCD 接口驱动、显示终端、键盘电路、电源转换模块等组成(如图1)。
射频接口为LEA_5提供高质量GPS L1信号。
LEA_5将射频信号经下变频后变为中频信号,经过基带处理器获得C/A码码信号,经过内部ARM解算出定位和导航结果。
定位结果经TxD送处理器MSP430F449,MSP430F449解读接收到的UBX Protocol Message,经实时解读,送LCD 显示。
键盘命令经RxD 向LEA_5发送配置命令(CFG Message)。
还可以通过USB 接口和PC 机连接,在PC 机上进行接收测试。
电池作为备用电源,在系统关机状态下存储定位参数,令系统在下次开机时可以在很短的时间快速获得定位结果输出(即TTFF)。
4. 射频电路设计4.1 天线的选择GPS 天线分为有源和无源两种,无源天线在使用时对射频部分的电路设计和制作要求比较高,射频电路会很容易给天线信号带来较明显的噪声和干扰,影响天线的性能,为了获得高灵敏度和高精度,我们采用有源GPS 天线。
有源GPS 天线的内部整合有低噪声放大器,这个天线的内部低噪声放大器可以与接收芯片的射频前端直接连接后,并经同轴电缆获得直流供电电压,同轴电缆的偏置电压是从管脚图2 有源天线连接图V_ANT 输入并经内部电路连接后从RF_IN 脚输出,为有源天线内部低噪声放大器提供偏置电压。
V_ANT 可以与VCC_RF 连接,从VCC_RF 脚获得电压,不过为了适合不同的有源天线的电气特性,建议由外部电压V 提供(如图2所示),不过此时的输入电流应控制在V_ANT 的极限电流之内。
4.2 阻抗匹配射频电路的设计的一个关键是要注意天线信号输出点与LEA-5接收模块信号输入点间的阻抗匹配,以确保得到天线的最大输出功率。
GPS 天线的阻抗为50Ω,连接射频信号接入点和RF_IN 点之间的微带线在设计时应满足下列条件:公式1中,Z 0=微带线的表面电阻、εr=电介质系数(对于FR-4材料介质系数在4.5~5之间),w=微带宽度,h=介质厚度,t=微带高度,根据线路板制作工艺,设计合理w 值,令Z 0=50Ω。
4.3 天线开路短路保护短路和开路保护电路见图3所示。
短路保护。
当发生V_ANT 与GND 短接时,经V_ANT 进入的电流过大会损坏LEA_5模块,图3中的电阻R2可以在这种情况发生时有效保护接收模块。
一旦发生短路,LEA_5内部基带处理器会立刻检测到并切断供给天线的电源,从而切断短路源使电路得到保护。
开路保护。
开路保护的极限电流是3mA~5mA,低于3mA 的电流时即为开路,高于5mA 的电流则表明天线不处于开路状态。
如果通过T2的电流增大,电流通过R4后快速跌落,此时ADDET_N 为高电平表明此时为开路状态;反之如果T2电流变小,则ADDET_N 为低电平,LEA_5模块根据ADDET_N输入状态启动内部开路保护机制。
(公式1) )(8.098.5ln 41.1870Ω++=tw h Z rε图3 开路短路检测保护电路5.电路板布线设计合理的电路板布局和布线可以大大减少干扰和噪声,令系统体现出最佳的性能。
在电路板布线设计时,提出以下几点供参考:射频连接点与RF_IN间应以最短的直线连接,尽量避免斜线和折线连接;射频连线应远离数字电路的连线;铺设地层,在射频和基频电路下开设大量的通孔;对外部信号干扰进行电磁屏蔽能有效提高信号质量和定位精度等。
6.结论射频干扰是影响定位精度的一个重要因素,通过合理的天线选择、射频电路设计、科学地进行线路板布局,减少外界的干扰,利用u-blox5的各项技术,可以获得很好的定位结果。
图4为实验接收样机,样机由GPS天线、电源模块、带屏蔽盒的接收机(天线下侧)、接口和电缆组成。