机电一体化实验要求
机电一体化系统设计实验报告模板

机电一体化系统设计实验报告模板
实验目的:
本实验旨在培养学生机电一体化系统设计的能力,通过设计实现对机电一体化系统实
现控制,提高学生的实践能力和创新能力。
实验原理:
机电一体化系统由机械部件、电子元件、电气部件、计算机等多种组成形式,在机械
加工、控制技术、电路设计等方面有较高的技术要求。
实验内容:
1、机电一体化系统的结构设计
2、机械部件的加工制作
3、电气控制系统的设计
4、步进电机的控制
5、控制算法和程序的设计编写
6、系统性能测试
实验过程:
1、机电系统结构设计
首先对机电一体化系统的结构进行设计,包括机械部件、电子元件和电气部件的布局,确定控制模块的位置和互联关系,保证系统结构合理性和可维护性。
2、机械部件的加工制作
根据系统结构设计,制作机械部件,包括底座、支架、导轨、工作台等,保证机械结
构的精度和可靠性。
3、电气控制系统的设计
根据系统结构设计,设计电气控制系统,包括供电电路、传感器电路、控制电路等,
保证控制系统的可靠性和精度。
4、步进电机的控制
对系统中的步进电机进行控制,设计电子线路和程序,保证步进电机的精度和稳定性。
5、控制算法和程序的设计编写
设计控制算法,编写控制程序,保证系统的可控性和稳定性。
6、系统性能测试
对设计的机电一体化系统进行测试,测试系统的性能和可靠性,反馈出可能存在的问题,进一步优化设计方案。
实验结果:
实验数据表明,所设计的机电一体化系统具有较高精度和稳定性,能够满足实际使用需求。
经过反复测试和改进,实验过程得到了较好的改进,为以后相关工作的开展带来了更好的基础。
最新机电一体化实验报告
最新机电一体化实验报告实验目的:1. 理解机电一体化系统的工作原理及其组成部分。
2. 掌握机电一体化设备的操作流程和调试方法。
3. 分析机电一体化系统在实际应用中的优势和局限性。
实验设备与材料:1. 机电一体化实验平台2. 传感器套装(包括但不限于温度传感器、压力传感器、位移传感器)3. 执行器套装(如步进电机、伺服电机)4. 控制单元(如PLC或微控制器)5. 数据采集与分析软件6. 相关电缆和接口设备实验步骤:1. 根据实验指导书,熟悉实验平台的结构和各个组件的功能。
2. 安装并调试传感器,确保其能够准确采集环境数据。
3. 配置执行器,并进行初步的功能测试。
4. 编写控制程序,实现对机电一体化系统的基本控制。
5. 通过控制单元,将传感器数据与执行器动作进行联动,实现闭环控制。
6. 使用数据采集软件记录实验过程中的关键数据。
7. 对采集到的数据进行分析,评估系统性能和稳定性。
8. 根据分析结果,对系统参数进行调整,优化系统性能。
9. 撰写实验报告,总结实验过程、结果和发现的问题。
实验结果与分析:1. 描述实验过程中观察到的系统行为和性能表现。
2. 展示关键数据图表,如传感器读数、执行器响应时间等。
3. 分析系统在特定任务下的表现,讨论其优势和存在的不足。
4. 提出可能的改进措施,以提高系统的效率和可靠性。
结论:1. 总结机电一体化系统在本次实验中的整体表现。
2. 强调实验中学习到的关键知识点和技能。
3. 讨论实验结果对未来机电一体化应用的启示。
建议与展望:1. 针对实验中遇到的问题提出解决方案。
2. 探讨未来机电一体化技术的发展趋势和潜在应用领域。
3. 建议进一步的实验或研究方向,以深化对机电一体化系统的理解。
机电一体化系统仿真实验报告

机电一体化系统仿真实验报告一、实验目标本实验的目标是通过仿真模拟机电一体化系统,验证系统的工作原理和性能参数,探究机电一体化系统在不同工况下的响应特性。
二、实验原理机电一体化系统是由机械部分和电气部分组成的,其中机械部分包括传动装置、力传感器和负载,电气部分包括控制器和电机。
在机电一体化系统中,电机通过控制器产生驱动信号,控制负载的转动。
力传感器用于测量负载的转动产生的力,并反馈给控制器。
三、实验步骤1.搭建仿真模型:根据实验要求,选择合适的仿真软件,搭建机电一体化系统的仿真模型。
通过连接电机、控制器、传动装置、力传感器和负载,构建完整的系统。
2.设置参数:根据实验设定的工况,设置系统的参数。
包括电机的转速、传动装置的传动比、负载的转动惯量和滑动摩擦系数等。
3.运行仿真:对系统进行仿真运行,记录电机的转速、负载的转动惯量、力传感器的输出力以及电机的功率消耗等参数。
4.分析结果:根据仿真结果,分析系统在不同工况下的响应特性。
可以通过绘制曲线图或制作动画来观察系统的运动轨迹和力的变化情况。
五、实验结果与讨论根据实验设置的参数,在不同转速和负载惯量下进行了多组仿真实验,并记录了系统的各项参数。
1.转速与力的关系:随着电机转速的增加,负载的输出力也随之增加,但是增幅逐渐减小。
当转速达到一定值后,输出力和转速的关系呈现饱和状态。
2.负载惯量与转速的关系:在给定转速范围内,随着负载惯量的增加,电机的转速逐渐降低。
这是因为负载惯量增加会增加系统的惯性,降低了电机的响应速度。
3.功率消耗的变化:随着转速和负载惯量的增加,电机的功率消耗呈现增加的趋势。
这是因为转速和负载惯量的增加会增加电机的负载,使其需要输出更大的功率来维持转速。
四、实验总结通过此次实验,我们深入了解了机电一体化系统的工作原理和性能特点。
在不同工况下,电机的转速、负载的力输出、功率消耗等参数都有相应的变化。
通过仿真实验,我们可以准确地预测系统在不同工况下的性能表现,为设计和优化机电一体化系统提供了依据。
机电一体化系统综合实训
西安广播电视大学开放教育机械制造与自动化(机电方向)专业(专科)机电一体化系统综合实训学生姓名:范澍萱学号:1461101451464指导老师:万宏强分校:莲湖分校时间:2016年5月20日机电一体化系统综合实训表面粗糙度测量计实习一、任务目的与要求1.1目的1.1.1了解表面粗糙度测量计的组成,建立表面粗糙度测量的概念1.1.2 了解表面粗糙度测量计的机械结构和传动原理1.1.3学习传感器的工作原理及其正确接线1.1.4学习各单元之间的通信方法和系统调试1.1.5增强团队合作精神1.2要求1.2.1 熟悉机械部分的组成、工作原理1.2.2 绘制机械部分的工作原理图1.2.3 绘制所研究系统的图1.2.4了解各模块控制信号的类型1.2.5熟悉各模块所用传感器类型、结构、工作原理、性能和使用1.2.6正确分析传感器信号与其它传感器信号的传送过程二、实习内容及过程1 绪论1.1前言机械加工中,表面特征的研究是控制机械零件表面质量的重要内容,而表面粗糙度是表面特种的重要技术指标之一。
随着机械加工工艺水平的提高,对零件的表面质量提出了越来越高的要求。
无论用何种加工方法加工,在零件表面总会留下凹凸不平的刀痕,出现交错起伏的峰谷现象,粗加工后的表面用肉眼就可以看到,精加工后的表面用放大镜或者显微镜仍能观察到,这就是零件加工后的表面粗糙度,过去称为表面光洁度。
国家规定表面粗糙度的参数由高度参数、间距参数和综合参数组成。
1.2题目背景和意义表面粗糙度是指加工表面上具有较小间距和峰谷所组成的微观几何形状特性。
它的大小对零件表面的摩擦磨损、疲劳强度、冲击强度、耐腐蚀性、接触刚度和抗震性、配合性质、测量精度和密封行等有很大的影响。
粗糙度测量有接触测量和非接触测量两大类方法。
触针式接触测量粗糙度参数的方法具有精度高,稳定性好的优点。
该课题就是针对触针式测量粗糙度的测量系统进行改造。
1.3国内外表面粗糙度测量系统的研制情况表面粗糙度与零件表面功能有着密切的关系,因此人们在很早以前就认识到测量表面粗糙度的重要性。
机电一体化实验指导书
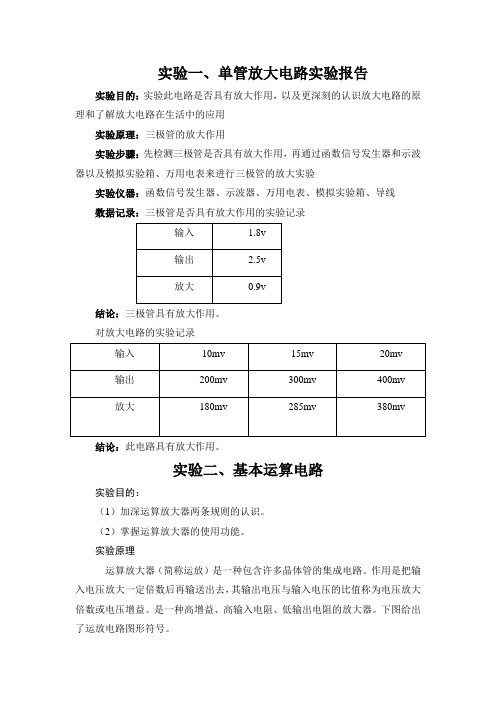
实验一、单管放大电路实验报告实验目的:实验此电路是否具有放大作用,以及更深刻的认识放大电路的原理和了解放大电路在生活中的应用实验原理:三极管的放大作用实验步骤:先检测三极管是否具有放大作用,再通过函数信号发生器和示波器以及模拟实验箱、万用电表来进行三极管的放大实验实验仪器:函数信号发生器、示波器、万用电表、模拟实验箱、导线数据记录:三极管是否具有放大作用的实验记录输入 1.8v输出 2.5v放大0.9v结论:三极管具有放大作用。
对放大电路的实验记录输入10mv 15mv 20mv输出200mv 300mv 400mv放大180mv 285mv 380mv结论:此电路具有放大作用。
实验二、基本运算电路实验目的:(1)加深运算放大器两条规则的认识。
(2)掌握运算放大器的使用功能。
实验原理运算放大器(简称运放)是一种包含许多晶体管的集成电路。
作用是把输入电压放大一定倍数后再输送出去,其输出电压与输入电压的比值称为电压放大倍数或电压增益。
是一种高增益、高输入电阻、低输出电阻的放大器。
下图给出了运放电路图形符号。
运放有两个输入端a (倒相输入端或反相输入端)、b (非倒相输入端或同相输入端)和一个输出端O 。
理想运放是指其开环放大倍数A →∞,输入电阻R í→∞,输出电阻R O →0,可以得出以下两条规则:(1)倒相端和非倒相端(反相输入端和同相输入端)的输入电流均为零(虚断I += I -=0)。
(2)对于公共端(地),倒相端和非倒相端(反相输入端和同相输入端)的电压相等(U +=U -)。
实验内容与步骤 1.反相比例运算电路反相比例运算电路如图所示,图 反相比例运算电路输入电压U i 通过电阻R 作用与运放的反相输入端(其中R 2=R 1∥R f )。
根据理想运放的两条规则有U P =U N =0 I P =I N ,所以节点N 的电流方程为1R Un Ui -=Rf UoUn -有U O =—Ui R Rf 1,U O 与U i 成比例关系,比例系数为 —1R Rf,负号表示U O 与U i 反相。
机电一体化实验指导书

机电一体化实验指导书1目录实验一与非逻辑功能实验 (1)实验二定时器/计数器功能实验 (4)实验三置位/复位及脉冲指令实验 (8)实验四移位寄存器实验 (14)实验五数码显示的模拟控制 (19)实验六装配流水线的模拟控制 (23)实验七交通灯的模拟控制 (26)实验八机械手的模拟控制 (29)附录 (31)机电一体化实验指导书实验一与非逻辑功能实验一、实验目的1.熟悉PLC实验装置。
2.练习手持编程器的使用3.熟悉系统操作。
4.掌握与、或、非逻辑功能的编程方法。
二、实验内容1.熟悉三菱GX-Developer 编程软件的使用方法,请详细阅读本书附录的全部内容。
2.编制梯形图并写出程序,通过程序判断Y1、Y2、Y3、Y4的输出状态,然后再输入并运行程序加以验证。
三、实验原理1.线圈驱动指令LD、LDI、OUTLD:取指令。
表示一个与输入母线相连的常开接点指令,即常开接点逻辑运算起始。
LDI:取反指令。
表示一个与输入母线相连的常闭接点指令,即常闭接点逻辑运算起始。
OUT:线圈驱动指令,也叫输出指令。
LD、LDI两条指令的目标元件是X、Y、M、S、T、C,用于将接点接到母线上。
也可以与ANB指令、ORB指令配合使用,在分支起点也可使用。
OUT是驱动线圈的输出指令,它的目标元件是Y、M、S、T、C。
对输入继电器X不能使用。
OUT指令可以连续使用多次。
LD、LDI是一个程序步指令,这里的一个程序步即是一个字。
OUT是多程序步指令,要视目标元件而定。
OUT指令的目标元件是定时器T和计数器C时,必须设置常数K。
2.接点串联指令AND、ANIAND,与指令。
用于单个常开接点的串联。
ANI,与非指令。
用于单个常闭接点的串联。
AND与ANI都是一个程序步指令,它们串联接点的个数没有限制,也就是说这两条指令可以多次重复使用。
OUT指令后,通过接点对其它线圈使用OUT指令称为纵接输出或连续输出,连续输出如果顺序不错可以多次重复。
机电一体化系统实验指导书

实验一计算机控制系统组成实验
实验目的
1.通过了解物流生产线的结构及工作原理建立典型计算机控制系统基本组成概念;
2.了解物流生产线的工作过程,体会各组成部分的作用以及相互间是如何通讯协调工
作的。
柔性制造系统网络组成
物流生产线是由主控单元1、仓储单元4、拾取单元2、加工单元3、检测单元5及传送单元和上位工控机构成。
其控制器均为S7-200 PLC 226 ,相互间直接通过PPI网络通讯。
PPI网络拓扑图
由主控单元通过PPI总线控制其他从站PLC的工作状态(起停与物料运行情况).具体各从站的控制任务由各从站控制器独立运算与驱动完成。
另主控单元通过EM277和CP5611与上位工控机构成PROFIBUS_DP网络.组态软件
使用组态王.
PROFIBUS网络拓扑图
将上述两种总线合并,系统完整网络拓扑如图
了解分析系统中信息数据流的传输关系。
主控系统负责通过PPI总线控制其他从站
况。
PROFIBUS 总线系统中工控机安装组
态王,作为主站,通过CP5611板卡与各
EM277为从站的下位PLC系统连接,实
现上位人机界面系统与下位控制器连
接。
工作站分析
了解控制功能和程序,分析各
工作站的程序控制框图,详见
系统使用说明书
思考题:
1、试分析该计算机控制系统中各系统构成
2、分析PPI通讯网络中主站作用?
3、试分析主站与从站通讯数据区应如何规划
4、试分析顺序控制法在系统中运用?
5、谈谈仓储单元中显示装置的作用,可能的通讯参数与协议?
6、试分析某一单元的控制功能,并画出流程图。
机电一体化系统形考实训作业
机电一体化系统形考实训作业机电一体化系统形考实训作业一、介绍机电一体化系统是指将机械和电气控制技术结合在一起,实现机械设备的自动化和智能化。
本次实训作业旨在通过设计和搭建一个机电一体化系统,加深学生对于机电一体化技术的理解和应用。
二、实训内容1. 系统设计:根据题目要求,设计一个机电一体化系统,并完成系统的结构和功能设计。
2. 硬件搭建:按照设计要求,选购所需硬件设备和元件,并进行组装和连接。
3. 电气控制:设计和搭建电气控制系统,包括传感器、电机驱动和控制电路等。
4. 程序编写:根据系统功能需求,编写相应的控制程序,实现对机械设备的自动控制和操作。
5. 系统调试:对整个机电一体化系统进行调试和优化,确保系统能够正常运行和达到设计目标。
三、实训要求1. 系统设计要合理、创新且符合题目要求。
2. 硬件搭建要规范、可靠,各部件之间连接正确。
3. 电气控制要准确、稳定,各传感器和电机驱动能够正常工作。
4. 程序编写要规范、清晰,具备良好的界面和用户操作体验。
5. 系统调试要彻底,排除故障,确保系统能够稳定运行并满足设计要求。
四、作业提交1. 实物提交:将完成的机电一体化系统实物提交给实训老师进行评价和检查。
2. 报告提交:通过电子邮件方式,提交一份详细的实训报告,包括系统设计、硬件搭建、电气控制、程序编写、系统调试等内容的介绍和分析。
五、评分标准1. 系统设计(20分):设计合理,创新性,符合题目要求。
2. 硬件搭建(20分):规范、可靠,各部件连接正确。
3. 电气控制(20分):准确、稳定,传感器和电机驱动正常工作。
4. 程序编写(20分):规范、清晰,具备良好的界面和用户操作体验。
5. 系统调试(20分):彻底、稳定,系统能够正常运行并满足设计要求。
六、注意事项1. 本实训作业要求学生严格按照学校的学术诚信规范完成,不得抄袭或剽窃他人作品。
2. 完成本实训作业需要时间和耐心,学生应提前规划实训进度,合理安排时间。