机械学基础(轮系-习题课)
机械原理-轮系集合例题

第5章轮系典型例题例1在图示轮系中,已知各轮齿数为:z1 =z1' = 40,z2=z4=30,z3=z5=100,试求传动比i1H。
解:齿轮1',4,5和系杆H组成了一个差动轮系。
齿轮1,2,3和齿轮5(充当系杆)组成了一个行星轮系。
在由齿轮1,2,3和齿轮5(系杆)组成的行星轮系中由于n 3=0,故有在由齿轮1',4,5和系杆H组成的差动轮系中即分析两个基本轮系的联系,可知n1= n1'(c)将(a),(c)两式代入(b),可得计算结果为正,表明从动系杆H和主动齿轮1的转向相同。
例2 在图示轮系中,已知各轮齿数为:z 1 = 90,z 2 = 60,z 2' = 30,z 3 =30,z 3' = 24,z 4 = 18,z 5 = 60,z 5' = 36,z 6 = 32。
运动从A,B两轴输入,由构件H输出。
已知n A=100r/min,n B=900r/min,转向如图所示。
试求输出轴H的转速n H的大小和方向。
解:齿轮3',4,5和系杆H组成了一个差动轮系齿轮1,2,2',3组成了一个定轴轮系,齿轮5',6组成了另一个定轴轮系。
对于齿轮3',4,5和系杆H组成的差动轮系,有即对于齿轮1,2,2',3组成的定轴轮系,有即对于齿轮5,6组成的定轴轮系,有即分析三个轮系之间的基本联系,有将该结果带入(a)式,可得化简整理后得计算结果为负,说明n H转向与n 5 相同,即n A,n B转向相反。
例3 在图示轮系中,已知齿轮1的转速为n 1 =1650 r/min,齿轮4的转速n4=1000r/min,所有齿轮都是标准齿轮,且z 2=z 5=z 6=20。
求各个齿轮中未知的齿轮齿数。
解:由齿轮1与齿轮3和齿轮6与齿轮4的同轴条件得齿轮1,2,3及系杆H1组成差动轮系;齿轮4,5,6及系杆H2组成行星轮系。
机械基础习题课

18、在曲柄滑块机构中,若以曲柄为主动件,则可把曲柄的旋 转运动转换成滑块的往复直线移动。
19、改变曲柄滑块机构中的机架,可演化出转动导杆机构、曲 柄摇块机构和移动导杆机构。
20、曲柄滑块机构中,当极位夹角q > 00时,机构具有急回特性; 当极位夹角q=00时,机构无急回特性。
杆的刚度
。
A降低 B提高
C不变
5、与齿轮传动相比,蜗杆传动轮齿间的相对滑动速度 。
ቤተ መጻሕፍቲ ባይዱ
A较大 B较小
C相同
6、蜗杆传动中,以下参数中标准化的有
。
A蜗杆头数 B蜗杆分度圆直径 C蜗杆导程角
7、 当两轴相距较远且要求传动比准确时,应采用 。
A带传动 B轮系传动 D蜗杆传动
8、定轴轮系传动比的大小与轮系中惰轮的齿数 。
21、曲柄摇杆机构中,当出现急回运动时,曲柄为主动件,摇 杆为从动件。
22、凸轮机构的基本特点在于能使从动件获得预期的运动规律。
23、按凸轮的形状分类,凸轮机构可分为盘形凸轮机构、移动 凸轮机构和圆柱凸轮机构。
24、按从动件端部形状分类,齿轮机构可分为尖顶从动件凸轮 机构、滚子从动件凸轮机构和平底从动件凸轮机构。
9、蜗杆传动,蜗杆头数确定后,直径系数越小,导程角越大。
10、轮系中的惰轮只改变从动轮的转向,不改变轮系传动比的 大小。
11、定轴轮系末端为螺旋传动,已知输入运动的主动轮转速 n1=1450r/min,轮系传动比i=50,双线螺杆的螺距P=1mm,则 螺母的移动速度为 58 mm/min。
12、周转轮系中,轴线固定的齿轮称为中心轮,兼有自转和公 转的齿轮称为行星轮。
机械基础轮系习题

1定轴轮系的传动比等于各对齿轮传动比的连乘积。
〔〕周转轮系的传动比等于各对齿轮传动比的连乘积。
〔〕那么反之不论什么状况,以中心轮为原行星轮系中假定系杆为原动件可驱动中心轮,动件时也必定可驱动系杆。
〔〕平面定轴轮系传动比的大小等于〔1〕;从动轮的展转方向可用〔1〕方法来确立。
所谓定轴轮系是指①〔1〕,而周转轮系是指②〔1〕在图示轮系中,:蜗杆为单头且右旋,转速n11440r/min,转动方向如图示,其他各轮齿数为:z2?40,z2'20,z330,z3'18,z4?54,试:〔1〕说明轮系属于何种种类;〔2〕计算齿轮4的转速n4;〔3〕在图中标出齿轮4的转动方向。
在图示轮系中,依据齿轮1的转动方向,在图上标出蜗轮4的转动方向。
1、在图示的轮系中,各轮齿数为z1,齿轮1、4、z2z3z5z6205、7为同轴线,试求该轮系的传动比i17。
2、在图示的轮系中,z124,z218,z315,z3'30,4105,当轴转z速n I19r/min时,试求轴和轮2的转速n II,n2。
3、计算图示轮系的传动比i1H,并确立输出杆H的转向。
各轮齿数z11,z240,z2'24,z372,z3'18,z4114,蜗杆左旋,n1转向如图示。
4、在图示增速器轮系中,设各轮齿数为z1,z2,z3,z4,z5,z6。
试求传动比i16。
5、在图示轮系中,各轮齿数分别为z11(右旋),z240,z2'20,z318, z420,z'30,z520,z655,n11000r/min,试求n B的大小和方向(方向可4用箭头表示)。
6、轮系如图示,由电动机带动齿轮1,其转速为n11296r/min,转向如图示,z120,z224,z320,z428,z528,z617,z762,z82,z980。
求:1〕蜗轮9的每分钟转数;32〕蜗轮9的转向〔以箭头表示在题图上〕;45〕蜗轮齿的倾斜方向。
机械设计基础第5章 轮系习题解答2
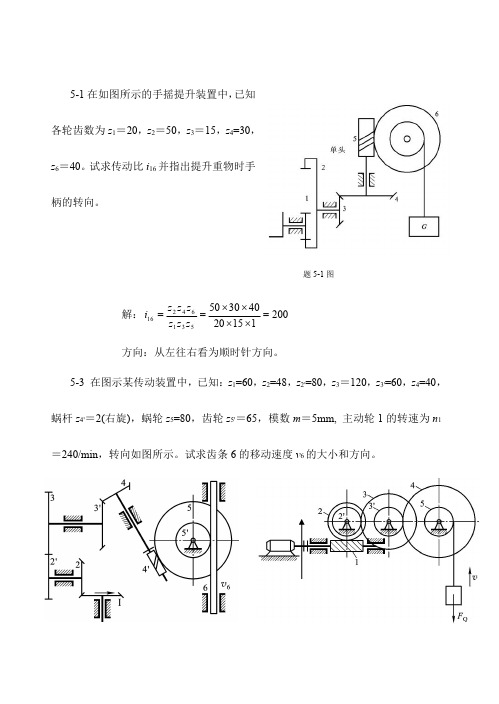
5-1在如图所示的手摇提升装置中,已知各轮齿数为z 1=20,z 2=50,z 3=15,z 4=30,z 6=40。
试求传动比i 16并指出提升重物时手柄的转向。
题5-1图解:2001152040305053164216=⨯⨯⨯⨯==z z z z z z i 方向:从左往右看为顺时针方向。
5-3在图示某传动装置中,已知:z 1=60,z 2=48,z 2'=80,z 3=120,z 3'=60,z 4=40,蜗杆z 4'=2(右旋),蜗轮z 5=80,齿轮z 5'=65,模数m =5mm,主动轮1的转速为n 1=240/min ,转向如图所示。
试求齿条6的移动速度v 6的大小和方向。
题5-3图题5-4图解:齿条的移动方向如图所示,其轮系传动比为:322608060804012048'4'3'2154325115=⨯⨯⨯⨯⨯⨯===z z z z z z z z n n i 则齿轮5’的转速为:min /5.7322401515r i n n ===又齿轮5’分度圆直径为:mm m z d 325565'5'5=⨯==所以齿条的移动速度为:s m n d v /128.0600005.73251000605'56=⨯⨯=⨯=ππ5-4如图所示为一电动卷扬机的传动简图。
已知蜗杆1为单头右旋蜗杆,蜗轮2的齿数z 2=42,其余各轮齿数为z 2'=18,z 3=78,z 3'=18,z 4=55;卷筒5与齿轮4固联,其直径D 5=400mm ,电动机转速。
n 1=1500r/min ,试求:(1)转筒5的转速n 5的人小和重物的移动速度v 。
(2)提升重物时,电动机应该以什么方向旋转?解:1.其轮系传动比为:11.5569500518181557842'3'214324114==⨯⨯⨯⨯===z z z z z z n n i 则齿轮4的转速(即转筒5的转速)为:min /70.211.556150014145r i n n n ====所以重物的移动速度为:s m n D v /057.0600007.2400100060556=⨯⨯=⨯=ππ5-5在如图所示周转轮系中,已知各轮齿数为z 1=60,z 2=20,z 2'=20,z 3=20,z 4=20,z 5=100,试求传动比i 41。
机械设计课后习题--轮系
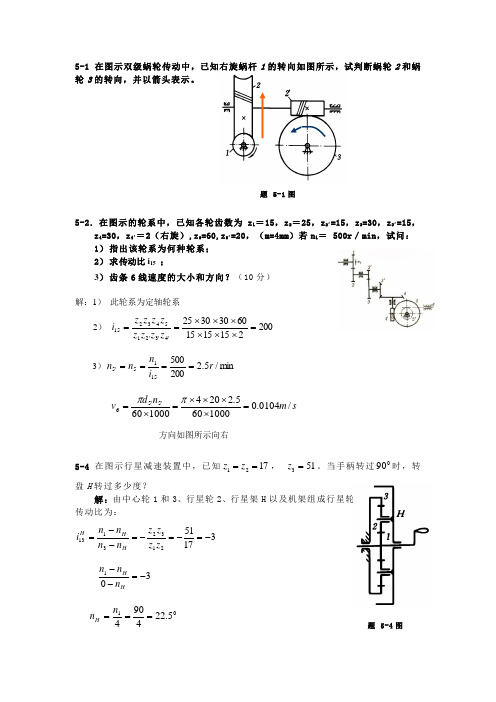
5-1 在图示双级蜗轮传动中,已知右旋蜗杆1的转向如图所示,试判断蜗轮2和蜗轮3的转向,并以箭头表示。
5-2.在图示的轮系中,已知各轮齿数为z l =15,z 2=25,z 2´=15,z 3=30,z 3´=15,z 4=30,z 4´=2(右旋),z 5=60,z 5´=20,(m=4mm )若n l = 500r /min ,试问:1) 指出该轮系为何种轮系;2) 求传动比i 15 ; 3) 齿条6线速度的大小和方向?(10分)解:1) 此轮系为定轴轮系2) 200215151560303025'4'3'21543215=⨯⨯⨯⨯⨯⨯==z z z z z z z z i 3)min /5.22005001515'5r i n n n ==== s m n d v /0104.01000605.2204100060'5'56=⨯⨯⨯⨯=⨯=ππ方向如图所示向右5-4 在图示行星减速装置中,已知1721==z z , 513=z 。
当手柄转过090时,转盘H 转过多少度?解:由中心轮1和3、行星轮2、行星架H 以及机架组成行星轮系,转化轮系的传动比为:3175121323113-=-=-=--=z z z z n n n n i H H H 301-=--HH n n n 015.224904===n n H 题 5-4图题 5-1图方向相同5-5 在图示的手动葫芦中,S 为手动链轮,H 为起重链轮。
已知121=z ,282=z ,142='z ,543=z ,求传动比SH i 。
解:由中心轮1和3、行星轮2-2’、行星架H 行星轮系,故()914125428''1213221321313113-=⨯⨯-=-=-=--==z z z z z z z z n n n n n n i H H H H H 03=n ,1n n s =101===∴HH s sH n n n n i 5-8 在图示圆锥齿轮组成的行星轮系中,已知各轮的齿数为201=z ,302=z ,502='z ,803=z ,m in /501r n =,求H n 的大小和方向。
大连理工大学 机械设计基础 作业解答:第5章-轮系
齿轮1、2组成定轴轮系,齿轮3、4、 4’、5和行星架组成周转轮系
定轴轮系
i12
n1 n2
Z2 Z1
Z2 17
周转轮系
i3H5
n3H n5H
n3 nH n5 nH
Z5Z4 Z4'Z3
2419 114 20 23 115
nH
n2 , n3
0,所以 n2 n5 n2
114 115
n1 n3
Z3 Z1
85 17
5,所以n3
n1 5
周转轮系中,i4H7
n4H n7H
n4 nH n7 nH
Z7Z5 Z6Z4
63 24 4 2118
nH
n3, n7
nP
,
所以
n4 nP
n1 / 5 n1 / 5
4, nP
n1
n4 4
(1)当n1
10001r
/ min 、n4
5-2 Z1=15, Z2=25 ,Z2'=15 ,Z3=30,Z3'=15, Z4=30, Z4'=2(右旋),Z5=60,Z5'=20(m=4mm), 若
n1=500(r/min),求齿条6的线速度。
传动4 .Z 3 .Z 2 Z 4' .Z 3' .Z 2' .Z1
的传动比 iSM 和分针与时针的传动比 iMH 。
秒针S到分针M的传动路线为齿轮 6—5—4—3,所以
i SM
Z3.Z5 Z 4 .Z 6
64 60 88
60
分针M到时针H的传动路线为 齿轮9—10—11—12,所以
iMH
Z12 .Z10 Z11.Z9
24 24 68
12
5-4 Z1 = Z2 =17, Z3 =51。当手柄转过90°时,转盘 H 转过 多少角度?
机械原理题目轮系

机械原理题目轮系第六章轮系及其设计计算及分析题1、已知:Z1=30,Z2=20,Z2’=30,Z3 = 25,Z4 = 100,求i1H。
2、图示轮系,已知各轮齿数Z1=18,Z2= Z4=30,Z3=78,Z5=76,试计算传动比i15。
12345H3、在图示轮系中,已知各轮齿数为Z1=Z3=30,Z2=90,Z2’=40,Z3’=40,Z4=30,试求传动比i1H,并说明I、H轴的转向是否相同4、在图示轮系中,已知各轮齿数为Z1 =15,Z2=20,Z2’ = Z3’= Z4=30,Z3=40,Z5= 90,试求传动比i1 H,并说明H的转向是否和齿轮1相同1I22’33’4H5、在图示轮系中,已知各轮的齿数为Z1= 20,Z2=30,Z3=80,Z4=25,Z5=50,试求传动比i15。
6、在图示轮系中,已知各轮齿数为Z1=19,Z2=76,Z2’= 40,Z3=20,Z4= 80,试求传动比i1H。
7、在图示轮系中,已知各轮齿数为Z1= 20,Z2’= 25,Z2= Z3=30,Z3’= 20,Z4=75,试求:(1)轮系的传动比i1H。
(2)若n1=1000r/min,转臂H的转速n H=8、已知图示轮系中各轮的齿数Z1=20,Z2=40,Z3=15,Z4=60,轮1的转速为n1=120r/min,转向如图。
试求轮3的转速n3的大小和转向。
1232’3’4H45123H122’3453’H9、在图示轮系中,已知各轮齿数为Z 1= Z 3= Z 4=20,Z 2=40,Z 5= 60, n 1 = 800r/min ,方向如图所示,试求n H 的大小及转10、在图示轮系中,已知各轮齿数为Z 1=16 ,Z 2=24, Z 2’= 20,Z 3=40,Z 3’= 30, Z 4= 20,Z 5=70试求轮系的传动比i 1H 。
11、在图示轮系中,已知各轮齿数为Z 1= 15,Z 2=25,Z 2’= 20,Z 3=60,Z 4=10,Z 5=30,n 1=200r/min ,n 3=50r/min ,试求n 1、n 3转向相反时,n 5=。
机械学基础(轮系-习题课)

M H 6'
因 n H n M = 1 12 ? 故由式( ),( ),(c) 故由式(b),( )得
nH n1 nM = nM n1 nH = z2′′ z6′ 1 = z6 z7 12 z2 z = 1 z 2 z6 z7 zz z 1 2′′ 6′
3 100 n H 20 × 25 H nH=-100r/min i 13 = = 200 n H 30 × 25 2) n1与n3 反向,即用 n1=100r/min,n3= ห้องสมุดไป่ตู้200r/min代入, 反向, 代入, ) , 代入 100 n H 20 × 25 H i 13 = = 可得 nH=700r/min 30 × 25 200 n H 所求转速的方向,须由计算结果得正负号来决定, 所求转速的方向,须由计算结果得正负号来决定,决不 能在图形中直观判断! 能在图形中直观判断!
右图轮系中, 例1 右图轮系中,已知各轮的齿数 为:z1=48,z2=48,z2'=18,z3=24, , , , , 又n1=250r/min, n3=100r/min,转向 , , 如图所示.试求系杆的转速n 如图所示.试求系杆的转速 H的大 小和方向. 小和方向. 解:这是一个由锥齿轮所组成的周转轮 先计算其转化机构的传动比. 系.先计算其转化机构的传动比.
�
因
=1, n1=1,n3=-1
nH=-1/2
i1H =
n1 1 = = 2 1 nH 行星架与中心轮1转向相反. 行星架与中心轮1转向相反. 2
H n1 n1 n H z2 H i 12 = H = = n2 nH z1 n2
求n2.
注:转速有方 向.
n1=1,nH=-1/2 ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
能在图形中直观判断!
例1.图示轮系中,已知各轮的齿数 为: z1 z2 30, z3 90
试求当n1=1,n3=-1时nH及i1H的值。
解:这是一个差动轮系。
i1H3
1 H 3 H
n1 nH n3 nH
z2z3 z1z2
90 30
3
因 n1=1,n3=-1
解:H,4组成定轴轮系;齿轮1、2-2’、3和H 组成周转轮系
由于n3 0
n1 nH nH
16 25
解得n1
9 25
nH
所以
i14
n1 n4
9 25
nH
5nH
9 125
,
n1与n4 方向相反
3K型
(3个中心轮 和一个系杆)
系杆既不是输入 件也不是输出件, 只起支承行星轮 的作用。
例:已知齿数z1=30, z2=20, z2’= z3 = 25, n1=100r/min, n3=200r/min。 求nH。
2 2’ 2
解: 2’
i1H3
n1 nH n3 nH
z2z3 z1z 2'
H 13
1
3
1) n1与n3 同向, n1=100r/min n3=200r/min代入,可得
4'
成定轴轮系,得
3'
E
3
4 N
2 2"
2' 6
1
7S
M H 6'
i1H
n1 nH
n1 n7
(1)3 z2z6z7 z1 z2 z6
(c)
因 nM ns 1 60
3'
5
E
3
故由式(a)、(b)得
nM ns
n1 ns n1 nM
z2 z3 z4 z1 z2 z3
nH=-1/2
i1H
n1 nH
1 1
2
2
行星架与中心轮1转向相反。
求n2。
i1H2
n1H nH2
n1 nH n2 nH
z2 z1
n1=1,nH=-1/2
n2=-2,方向与n1相反。
注:转速有方 向。
例1 右图轮系中,已知各轮的齿数 为:z1=48,z2=48,z2’=18,z3=24, 又n1=250r/min, n3=100r/min,转向 如图所示。试求系杆的转速nH的大 小和方向。
i1H3
100 nH 200 nH
20 25 30 25
nH=-100r/min
2) n1与n3 反向,即用 n1=100r/min,n3= -200r/min代入,
i1H3
100 nH 200 nH
20 25 30 25
可得 nH=700r/min
所求转速的方向,须由计算结果得正负号来决定,决不
nH=50r/min 系杆H的转向与齿轮1相同,与齿轮3相反。
例 图示轮系,各轮齿数 z3=z2’=60 , z2=20 , z1=30,
n3=60rpm, nH=180rpm, n3、nH转向相同,求n1 ?
解: 此轮系需用箭头法确定式中正负号
i1H3
n1H n3H
n1 nH n3 nH
轮系习题课
例: 钟表传动示意图如下。E为擒纵轮,N为
发条盘,S、M及H各为秒针、分针及时针。设
Z1=72, Z2=12, Z2'=64 , Z3=8, Z3’=60 ,
Z4'=60, Z5 =6, Z2"=8, Z6=24, Z6’=6,问
Z4、Z7各为多少? 解:(1) 走秒传动,由 5
3'
E
3
z2 z1
4'
N
4
2 2"
2' 6
1
z3z4 1 z2z3 60
故
z4
z2 z3 60 z3
64 60 60 8
8
7S
M H 6'
因 nH nM 1 12 ? 故由式(b)、(c)得
nH
n1
nM
z2 z1
nM n1 nH
z2z3 z1z2'
设n3转向为正,则
n1 180 2060 2 60 180 3060 3
3
H
得 n1=260 r/min 正值说明轮1、3转向相同
2'
2
1
例2:在图示的轮系中,已知各轮齿轮为Z1=Z2’=25,Z2=Z3=20, ZH=100,Z4=20。求传动比i14。
轮1,2(2'),3(3'),4组成
2 2"
7S
定轴轮系,得
4
i1S
n1 ns
n1 n4
(1)3
z2 z3z4 z1 z2 z3
4' (a) N
2' 6
1
M H 6'
(2) 走分传动,由轮1, 2组成定轴轮系,得 5
i1M
n1 nM
n1 n2
z2 z1
(b)
(3) 走时传动,由轮1, 2(2"),6(6'),7组
z2 z6 z7 z1 z2 z6
z2z6 1 z6z7 12
3'
5
E
3
2 2"
4 4'
N
2' 6
1
故
z7
12 z2z6 z6
12 8 6 24
24
7S M
H 6'
本题为分路传动的定轴轮系。各路的首末两 轮的转向关系用传动比正、负号表示,并可 直接用外啮合的数目m来确定,即(-1)m。
解:这是一个由锥齿轮所组成的周转轮 系。先计算其转化机构的传动比。
i1H3
n1 nH n3 nH
(1) z2z3 z1z2
48 24 48 18
4 3
n1=250r/min n3=-100r/min ?
规定n1为正
n1 nH 250 nH 4 n3 nH 100 nH 3