互补滤波在直立控制算法的应用探究
基于互补滤波的飞行器姿态解算
姿态解算一、主线姿态表示方式:矩阵表示,轴角表示,欧拉角表示,四元数表示。
惯性测量单元IMU(Inertial Measurement Unit):MPU6050芯片,包含陀螺仪和加速度计,分别测量三轴加速度和三轴角速度。
注意,传感器所测数据是原始数据,包含了噪声,无法直接用于飞行器的姿态解算,因此需要对数据进行滤波。
滤波算法:非线性互补滤波算法,卡尔曼滤波算法,Mahony互补滤波算法。
二、知识点补充加速度计和陀螺仪加速度计:加速度计,可以测量加速度,包括外力加速度和重力加速度,因此,当被测物体在静止或匀速运动(匀速直线运动)的时候,加速度计仅仅测量的是重力加速度,而重力加速度与R坐标系(绝对坐标系)是固连的,通过这种关系,可以得到加速度计所在平面与地面的角度关系也就是横滚角和俯仰角。
把加速度传感器水平静止放在桌子上,它的Z轴输出的是1g的加速度。
因为它Z轴方向被重力向下拉出了一个形变。
可惜的是,加速度传感器不会区分重力加速度与外力加速度。
所以,当系统在三维空间做变速运动时,它的输出就不正确了,或者说它的输出不能表明物体的姿态和运动状态。
陀螺仪:陀螺仪测量角速度。
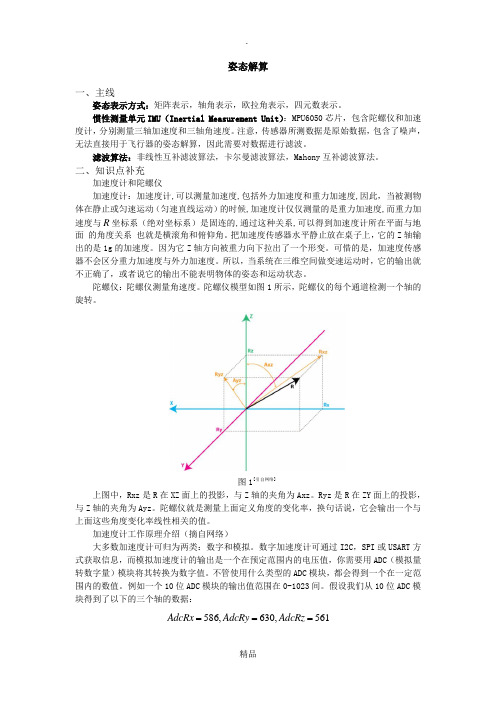
陀螺仪模型如图1所示,陀螺仪的每个通道检测一个轴的旋转。
图1[引自网络]上图中,Rxz是R在XZ面上的投影,与Z轴的夹角为Axz。
Ryz是R在ZY面上的投影,与Z轴的夹角为Ayz。
陀螺仪就是测量上面定义角度的变化率,换句话说,它会输出一个与上面这些角度变化率线性相关的值。
加速度计工作原理介绍(摘自网络)大多数加速度计可归为两类:数字和模拟。
数字加速度计可通过I2C,SPI或USART方式获取信息,而模拟加速度计的输出是一个在预定范围内的电压值,你需要用ADC(模拟量转数字量)模块将其转换为数字值。
不管使用什么类型的ADC模块,都会得到一个在一定范围内的数值。
例如一个10位ADC模块的输出值范围在0-1023间。
假设我们从10位ADC模块得到了以下的三个轴的数据:===586,630,561AdcRx AdcRy AdcRz每个ADC 模块都有一个参考电压,假设在我们的例子中,它是3.3V 。
mahony互补滤波算法

mahony互补滤波算法Mahony互补滤波算法是一种目前广泛应用于姿态估计的算法,它主要用于通过传感器采集的数据,来实现对运动物体的姿态估计。
相对于其他姿态估计算法,Mahony互补滤波算法不仅具有计算速度快、精度高等优点,而且其实现方式也相对简单易懂,因此广受大众欢迎。
Mahony互补滤波算法的核心思想是通过将加速度计和陀螺仪的测量结果进行合并,来获得更加准确的姿态估计数据。
与传统的卡尔曼滤波算法不同的是,Mahony互补滤波算法采用了一种比较简单的处理方式,即将滤波因子设定为常量,避免了需要进行频繁更新的矩阵运算,从而大大提高了计算速度。
Mahony互补滤波算法的具体实现可以分为两个步骤:首先是获取运动物体的姿态数据,包括加速度计、陀螺仪等传感器的测量值;其次是通过将这些数据进行滤波处理,来获得更准确的姿态估计信息。
获取姿态数据的过程中,加速度计主要用于测量物体的加速度大小和方向,从而推断出物体的姿态角度;而陀螺仪则主要用于测量物体的角速度,从而推断出物体的角度变化速率。
这两个传感器采集到的数据都非常重要,需要进行合理的处理和滤波,从而消除可能带来的误差和干扰。
对于数据的处理和滤波,Mahony互补滤波算法主要采用了一种互补滤波器的结构,这种滤波器是由两个滤波器组成的,一个是低通滤波器,另一个是高通滤波器。
低通滤波器主要用于滤去陀螺仪采集到的高频噪声信号,从而获得较为稳定的姿态信息;高通滤波器则主要用于去除加速度计的重力引起的偏移误差,从而获得准确的加速度信息。
通过优化互补滤波器的参数,Mahony互补滤波算法可以在保证计算效率的前提下,获得较为准确的姿态估计结果。
同时,Mahony互补滤波算法还可以使用其他的补偿方式,如采用积分补偿、加入陀螺仪固有漂移补偿等,进一步提高算法的性能和精度。
总的来说,Mahony互补滤波算法是一种比较高效、准确的姿态估计算法,已经在无人机飞行控制、机器人导航、运动追踪等领域得到了广泛的应用。
六轴陀螺仪互补滤波的作用
六轴陀螺仪互补滤波的作用
互补滤波是在数据融合领域中常用的一种技术,其主要作用是将多个传感器的数据进行融合,以获得更准确的结果。
在六轴陀螺仪中,互补滤波的作用主要是对陀螺仪和加速度计的数据进行融合,以获得更准确的姿态数据。
具体来说,互补滤波器会对陀螺仪和加速度计的数据进行比较,根据两者的差异来计算出设备的姿态。
因为陀螺仪的测量范围比较大,但测量精度容易受到温度、压力等因素的影响;而加速度计的测量范围比较小,但测量精度比较高。
通过将两者的数据进行融合,可以互相修正误差,获得更准确的姿态数据。
在使用六轴陀螺仪时,互补滤波器的作用非常重要。
因为在实际使用中,设备的姿态会不断变化,而陀螺仪和加速度计的数据也可能会因为各种原因而出现误差。
通过互补滤波器的数据处理,可以对这些误差进行修正,从而提高设备姿态的准确性。
特别是在一些需要高精度姿态控制的场景中,如无人机、机器人等,互补滤波的作用更加明显。
总的来说,互补滤波器的作用是对多个传感器的数据进行融合,以获得更准确的结果。
在六轴陀螺仪中,互补滤波器的作用主要是对陀螺仪和加速度计的数据进行融合,以获得更准确的姿态数据。
互补滤波器在四元数法姿态解算中的应用
航 坐标 系为 地 理 坐 标 系。坐标 系 变换 以 刚 体 定 点 转 动 为基 础 ,
载 体 坐标 系转 换 到 导 航 坐标 系的过 程 可 以 分 解 为 绕 三 个 轴 的
三 次旋 转 。
2 四元数姿态算 法
2 . 1 四元 数
四 元 数 是 最 简单 的超 复数 ,能 够 非 常 方 便 的表 示 坐标 系
出载 体 坐标 系相 对 于 导航 坐 标 系的旋 转 。
P x Q( p 0 + p 1 i + p 2 j + P 3 k ) x ( q o + q 1 i + q 2 j + q 3 k )
=
( p 0 q o - P 1 q l — P 2 q 2 - P 3 q 3 ) + ( p 0 q l + p l q o + p 2 q 3 - P 3 q 2 ) i
+ ( p 0 q 2 + p 2 q o + P 3 q 1 一 P l q 3 ) j + ( p 0 q 3 + p 3 q o + P 1 q 2 - P 2 q 1 ) k( 4 )
2 . 2 四元数 姿态 算法
四 元 数 算 法 的 实质 是 用 四元 数 运 算表 示 载体 坐 标 系 b向
导 航 坐标 系 n的 旋 转 。载 体 坐 标 系 由导航 平 台机体 轴确 定 , 导
( 1 ) 地 理 坐标 系: 地 理 坐 标 系 的 原 点 选 在 导 航 平 台 的 质 心. Z轴 沿 当地 参 考 椭球 的 法 线指 向 天 顶 , X 轴 在 当地 水 平 面 且 沿 当地 纬 度 指 向 东 . Y 轴 沿 当地 子 午 线指 向北 。 ( 2 ) 栽 体 坐标 系 : 对 于栽 体 而 言 , 原 点在 栽 体 质 心 , X 轴 指 向栽体右方 , Y 轴指 向 栽 体前 方 , 并在载体对称面 内, Z轴垂 直
单球驱动自平衡机器人的互补滤波姿态解算

单球驱动自平衡机器人的互补滤波姿态解算余义;章政【摘要】针对单球驱动自平衡机器人的低成本、高精度、实时姿态估计需求,设计一种基于比例-积分(PI)型互补滤波的姿态估计算法.在四元数姿态角更新方程的基础上,通过融合陀螺仪/加速度计的姿态信息实现对机器人水平姿态信息的估计,实现多传感器间频率点的切换.考虑到磁力计易受到干扰的情况,采用陀螺仪和磁力计单独对自平衡机器人的偏航角姿态解算,避免磁力计参与四元数姿态解算引起的水平姿态误差.实验结果表明,该互补滤波算法有效融合了陀螺仪的高频特性、加速度计和磁力计的低频特性,系统的姿态估计精度在±0.15°内.【期刊名称】《计算机工程与设计》【年(卷),期】2019(040)004【总页数】7页(P969-975)【关键词】单球驱动自平衡机器人;互补滤波;姿态解算;陀螺仪/加速度计/磁力计;四元数【作者】余义;章政【作者单位】武汉科技大学信息科学与工程学院,湖北武汉430081;武汉科技大学信息科学与工程学院,湖北武汉430081;武汉科技大学冶金自动化与检测技术教育部工程研究中心,湖北武汉430081【正文语种】中文【中图分类】TP270 引言近十年来,一类以单球体作为驱动轮的轮式自平衡机器人逐渐引起了国内外学者的关注[1-10]。
该类自平衡机器人利用万向轮与底部支撑球体的摩擦产生驱动力,实现机器人的自平衡、自旋以及全方位移动,即使在狭窄区域内机器人也能灵活移动。
根据单球驱动自平衡机器人(self-balancing robot driven by single ball, SRDSB)的动力学模型[8]分析可知,这一类机器人具有多变量、强耦合、欠驱动等非线性特征[11]。
在有效的轮球式驱动结构基础上,为了维持机器人的姿态角(俯仰、横滚和偏航)动态平衡稳定,且同时保证机器人快速、灵活的全向移动,需要精确有效的姿态解算方法实现机器人的姿态实时估计。
基于互补滤波算法的移动机器人姿态检测
2 . S h e n y a n g I n s t i t u t e o f A u t o m a t i o n , C h i n e s e A c a d e m y o f S c i e n c e s , S h e n y a n g 1 1 0 0 1 6 , C h i n a )
基 于互补 滤 波算 法的 动机 器人 姿 态检 测
・ 3 l・
基于 互补滤波算法 的移动机器人 姿态检测
符秀辉 ,赵茂鑫 , 周 文俊
( 1 . 沈 阳化工 大学 信 息工程学院 , 辽宁 沈 阳 1 1 0 1 4 2 ; 2 . 中国科学院 沈 阳 自动化研究所 , 辽宁 沈阳 1 1 0 0 1 6 )
t i a t i o n p r o c e s s i n g i s u s e d t o i mpr o v e t h e dy n a mi c c h a r a c t e r o f t h e s y s t e m a n d i t h a s a s ma l l a mo u n t o f c a l c u l a —
摘要 : 移 动机 器人 的姿 态检 测 能 够反 映 出机 体相 对 于路 面 的 实时姿 态 , 有 利 于机 器人对 行进 过程 中的 当
前姿 态做 出相应 的控 制 。针 对移 动机 器人 姿 态检 测 的要 求 , 采 用 ME MS陀螺仪 和 加 速度 计 对移 动机 器
人 在 移 动过程 中相对 于路 面的姿 态倾 角进 行 测量 并通过 互补 滤 波算 法对 其测 量 的角度 进行 解 算 。互补 滤 波算 法将加 速 度计 静 态特性 和 陀螺 仪动 态特 性有 效 融合 到一起 , 并对 互补 滤波 算 法进 行 了微 分 处理 , 提 高 了 系统 的动 态特 性 , 计 算量 小 , 从 而 实现 对机 器人行 进过 程 的路 面起 伏状 况进 行 实 时测 量 。 关键词 : 陀螺 仪 ; 加 速 度计 ; 互补 滤波 算法 ; 机 器人姿 态
mahony 互补滤波算法 -回复
mahony 互补滤波算法-回复什么是mahony互补滤波算法?Mahony互补滤波算法是一种用于姿态估计的滤波算法。
它基于准互补滤波和马哈尼滤波的结合,旨在通过从加速度计和陀螺仪数据中提取信息,估计目标的姿态。
Mahony互补滤波算法的一个主要优势是它可以结合低成本的传感器来实现高精度的姿态估计,适用于无人机、机器人、虚拟现实等应用。
Mahony互补滤波算法的原理是通过利用加速度计和陀螺仪的数据,将它们的优势相结合,实现姿态估计。
加速度计可以提供全球坐标系下的重力向量,陀螺仪提供角速度测量。
在Mahony互补滤波算法中,通过将这两种测量结果进行滤波和互补处理,从而得到更准确的姿态估计。
Mahony互补滤波算法实现的关键是借助四元数来表示姿态。
四元数是一种数学表示方法,可以用来描述三维空间中的旋转。
通过四元数的乘法和加法运算,可以实现姿态的合成和更新。
Mahony互补滤波算法通过结合姿态误差的估计和观测更新,实现了对姿态的连续校准和更新。
Mahony互补滤波算法的具体步骤如下:1. 预处理:将加速度计和陀螺仪的原始测量数据进行预处理。
包括去除零偏、低通滤波等操作,以减少噪声和误差对姿态估计的影响。
2. 四元数初始化:通过加速度计测量值计算初始四元数,用来表示初始的姿态估计。
这个初始的姿态估计可以是加速度计的测量结果,也可以是其他方式得到的估计值。
3. 更新姿态:根据陀螺仪的角速度测量值,利用四元数的更新公式,对姿态进行更新。
通过将陀螺仪的角速度乘以时间间隔得到姿态变化量,将这个变化量与当前的姿态估计进行合成,得到新的姿态估计。
4. 误差校准:根据加速度计的测量结果,计算当前姿态估计与加速度计测量结果之间的角度差,得到姿态误差。
通过增益参数和误差修正的反馈控制,将姿态误差估计量与姿态估计进行互补滤波,使得姿态估计更接近真实值。
5. 姿态输出:通过四元数转换到欧拉角的方式,将姿态估计结果输出为欧拉角形式,以便于后续应用和处理。
互补滤波算法姿态解算

地磁场向量 可不可以采用和加速度计一样的修正方法来修正? 加速度计在静止时测量的是重力加速度(0,0,1)T ,是有大小和方向的; 同理,地磁计同样测量的是地球磁场的大小和方向,只不过这个方向不再是竖直向下 而是与x轴(或者y轴)呈一个角度,与z轴呈一个角度。记作(bx,by,bz)T ,这里我 们让x轴对准北边,所以by=0,即 (bx,0,bz)T 倘若我们知道bx和bz的精确值,那么我们就可以采用和加速度计一样的修正方法来)
23
01
q q q q 2
2
2
2
0
1
2
3
这样,四元数可以用方向余弦、欧拉角表示,同样,欧拉角也可以用 方向余弦和四元数表示。
用方向余弦表示四元数
对于小角度位移,四元数参数可以用表示为
q 0
1 2
1
(1c11c22c33) 2
q 1
1
4q
c c (
)
32
23
0
三、姿态表示方法
三、姿态表示方法
C 3.1 方向余弦矩阵 方向余弦矩阵用符号
n
b 表示,是一个3*3阶的矩阵,矩阵的列表示
载体坐标系中的单位矢量在参考坐标系中的投影。
三、姿态表示方法
C 3.1 方向余弦矩阵 方向余弦矩阵用符号
n
b 表示,是一个3*3阶的矩阵,矩阵的列表示
载体坐标系中的单位矢量在参考坐标系中的投影。
q 2
1
4q
c c (
)
13
31
0
q 3
1
4q
c c (
)
21
12
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单位时间的变化量, 求出这段时间内的变化量, 就可以根据初始量求 系数 。 在我们直立控制中采用 4 ms 更新你的程序循环 。当你想得到 出最终量。例如 : 一辆行驶的汽车 , 如果想要知道汽车每一时间的位 置 ,就可以根据汽车的起始位置再力 t l 上单位时间乘以单位时间的速 0 . 7 5 s 的时间常数, 则滤波器参数为 : 度。
民 蕾科技2 0 1 5 年第8 期
科技 论 坛
Байду номын сангаас
互补滤波在直立控制算法的应用探究
张 哲’ 李 玉 丽
. 吉林建筑大学, 吉林 长春 1 3 0 1 1 8 ) ( 1 . 吉林建筑大学 , 吉林 长春 1 3 0 1 1 8 ; 2
摘 要: 分别利用互补滤波以及梯度下降法将陀螺仪和加速度 计有 效结合 , 完成智能车的直立控制 。 关键词 : 智能车; 自平衡 ; 控制算 法
T 0 . 75 s e c ,
a = 面面 i 。 即, p o s i t i o n + = s p e e d { d t ; 同理, 转化为角度即为: ng a l  ̄ + = g y r o * d t ; 即, a n g l e = ( X ) * ( a n g l e + g y r o * 0 . 0 2 6 2 ) + ( 1 - X ) * ( x _ a c c ) 。 低通滤波器 : 低通滤波器的功能是仅让长时间的变化通过 , 对短 3 结 果与分 析 时间的变化进行滤除。为了实现这个功能, 我的方法是强行使这个变 为了验证方案的可行 陛,设计了双轮平衡摄像头直立小车对互 化在程序中运行并在循环中累 计建立。例如, 当角度 由 0 度, 变化到 7 3 6 1 , 加速度的 2 0度时, 不是阶跃跳变, 而是缓慢 匕 升。 高通滤波器 : 高通滤波器的原 补滤波器的效果进行验证。其中加速度计选用 MMA g , 以及 E N C 一 0 3 陀螺仪 , 测量范围为 ± 3 0 e 固 , s ) , 采用 理和低通滤波器相反的 :高通滤波器仅仅允{ 午 高频率的信 恿 过, 滤 测量范围为 ±6 4 M Hz , 分别进行了静态和动态测试。在我们的实践 中发现 , 通 出低频率的信号 , 主要用来消除漂移。采样周期 : 程序运行一遍的时 频率 6 相 间, 为采样频率的倒数。互补: 由两个滤波器组成的新滤波器, 输出一 过动态调整互补滤波器系数 ,不断调整陀螺仪和加速度计的权重 , 对于单独使用陀螺仪或加速度计能够获得更好的角度跟踪及估计。 个准确的线性估计 , 会输出—个有意义的近似。
例如 :低通滤波器输出为 x ,高通滤波器输出为 y , y = y + ( 1 一 a )
木X:
一
本文论述 了在时间不同情况下陀螺仪和加速度传感器对系统 的 影响 , 应用互补滤波以及梯度下降法两种控制算法 , 对两轮 自 平衡小
.
加可靠。 惯陛元件随着时间的推移, 会产生零飘 , 需要力 : I I 速度计进行补 偿修正。 如果仅做单—使用, 那么结果并不准确, 不能达到直立控制的 要求 。所以必须采取有效的控制算法 , 使两者有效、 科学的结合。 2 互补滤波控制算法 2 . 1 互 补滤波 器 的原 理 图中所示数字滤波器的功能如下 :
,h
移 隋况是 1 度/ 秒, 为了保证陀螺仪的漂移程度不会超过 1 度, 那么 我们则需要— j 、 于 1 s 的时间常数。 但时间常数并非越小越好 , 当时 间常数不断变小 , 加速度传感器的噪声就会被更多的作用于系统。所 以, 我们需要选择—个折 中的方法 , 既能解决陀螺仪的漂移问题 , 又不 会过多的引入加速度计的噪声。 为了得到合适的滤波器系数 , 必须选取合适 的采样率。当程序改 变或者增加浮点运算的时候 , 系统程序执行周期变长 , 采样率也会跟 积分: J f ( x ) d x = F ( b ) 一 F ( a ) , 所谓数值积分, 就是根据时间, 以及 着变小 , J 如果想让系统的时间常数减小 , 则必须重新计算新的滤波器
1 直立控 制的原 理 感器作用强于陀螺仪 , 漂移现象可能在这时候 出现 , 当时间周期小于 自动寻迹的直立智能车主要由直立控制 , 速度控制 , 方向控制三 0 . 5 s 时, 加速度传感器的作用弱于陀螺仪 , 此时加速度传感器的噪声
个方面构成。应用 MMA 7 3 6 1 加速度计和 MP R 5 5 0陀螺仪对直立控 将会被滤除。 假定 滤波器 为 a n g l e =( 0 . 9 8 ( a n g l e + g y r o * 0 . 0 2 6 2 ) +( 0 . 0 2 ) { 制方案进行探究。 小车的直立控制就是需要使小车尽快达到平衡位置。本文采用 ( X a c e ) 。 滤波器在 1 0 0 H Z 采样率条件下,将会得到低通和高通滤波器的 MC 9 S X S 1 2 8 作为中心处理器 , 通过陀螺仪和加速度计融合的值, 得到 小车与平衡位置的偏差 , 并根据偏差改变脉宽调制的 占空比, 使电机 时间 : f = = — 0 . 9 8 * 0 . 0 1 s e e= 0 4 9s e c 驱动输 出不同的电压, 从而改变传速 , 是小车不断靠近平衡位置。 . 2 . 2 互补滤波器系数整定。在—个系统内, 我们通常会根据系统的 在实验中, 我们发现加速度计是利用加速度的原理来测斜调平 , 2 生 先假定—个时间常数 , 然后根据这个时间常数进行系数估计。 在静态或者匀速运动更加准确 , 陀螺仪是利用惯性的原理 , 通过知道 特 f 时间常数可以调整系统响应盼陕慢, 角速率, 可以知道物体的姿态 , 以便对姿态进行控制, 在动态测量时更