野战防空C3I系统的目标指示雷达测量误差对目标火力分配的影响
野战C3I系统总体技术研究

野战C3I系统总体技术研究
封锦昌
【期刊名称】《无线电通信技术》
【年(卷),期】1990(016)006
【摘要】本文主要从战术C^3I系统的组成、系统的合成、系统的互通性、系统EMC、系统软件工程等方面对C^3I系统总体技术进行了论述和探讨.
【总页数】6页(P4-9)
【作者】封锦昌
【作者单位】不详;不详
【正文语种】中文
【中图分类】E211
【相关文献】
1.信息化条件下野战医院信息系统的总体设计 [J], 穆少杨;董冰媛
2.野战机动医疗系统总体框架构思与设计期望 [J], 李若新
3.野战防空C3I中的数据融合技术 [J], 梁百川
4.野战防空C3I系统可靠性试验方法探讨 [J], 姚成焕
5.野战防空C3I与防空兵作战指挥控制 [J], 李富元
因版权原因,仅展示原文概要,查看原文内容请购买。
野战防空侦察探测火箭弹需求研究
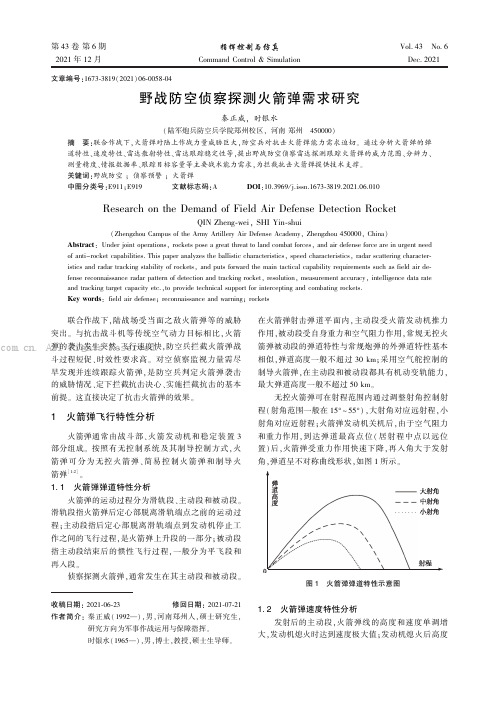
第43卷第6期2021年12月指挥控制与仿真CommandControl&SimulationVol 43㊀No 6Dec 2021文章编号:1673⁃3819(2021)06⁃0058⁃04野战防空侦察探测火箭弹需求研究秦正威,时银水(陆军炮兵防空兵学院郑州校区,河南郑州㊀450000)摘㊀要:联合作战下,火箭弹对陆上作战力量威胁巨大,防空兵对抗击火箭弹能力需求迫切㊂通过分析火箭弹的弹道特性㊁速度特性㊁雷达散射特性㊁雷达跟踪稳定性等,提出野战防空侦察雷达探测跟踪火箭弹的威力范围㊁分辨力㊁测量精度㊁情报数据率㊁跟踪目标容量等主要战术能力需求,为拦截抗击火箭弹提供技术支撑㊂关键词:野战防空;侦察预警;火箭弹中图分类号:E911;E919㊀㊀㊀㊀文献标志码:A㊀㊀㊀㊀DOI:10.3969/j.issn.1673⁃3819.2021.06.010ResearchontheDemandofFieldAirDefenseDetectionRocketQINZheng⁃wei,SHIYin⁃shui(ZhengzhouCampusoftheArmyArtilleryAirDefenseAcademy,Zhengzhou450000,China)Abstract:Underjointoperations,rocketsposeagreatthreattolandcombatforces,andairdefenseforceareinurgentneedofanti-rocketcapabilities.Thispaperanalyzestheballisticcharacteristics,speedcharacteristics,radarscatteringcharacter⁃isticsandradartrackingstabilityofrockets,andputsforwardthemaintacticalcapabilityrequirementssuchasfieldairde⁃fensereconnaissanceradarpatternofdetectionandtrackingrocket,resolution,measurementaccuracy,intelligencedatarateandtrackingtargetcapacityetc.,toprovidetechnicalsupportforinterceptingandcombatingrockets.Keywords:fieldairdefense;reconnaissanceandwarning;rockets收稿日期:2021⁃06⁃23修回日期:2021⁃07⁃21作者简介:秦正威(1992 ),男,河南郑州人,硕士研究生,研究方向为军事作战运用与保障指挥㊂时银水(1965 ),男,博士,教授,硕士生导师㊂㊀㊀联合作战下,陆战场受当面之敌火箭弹等的威胁突出㊂与抗击战斗机等传统空气动力目标相比,火箭弹的袭击发生突然㊁飞行速度快,防空兵拦截火箭弹战斗过程短促㊁时效性要求高㊂对空侦察监视力量需尽早发现并连续跟踪火箭弹,是防空兵判定火箭弹袭击的威胁情况㊁定下拦截抗击决心㊁实施拦截抗击的基本前提㊂这直接决定了抗击火箭弹的效果㊂1㊀火箭弹飞行特性分析火箭弹通常由战斗部㊁火箭发动机和稳定装置3部分组成㊂按照有无控制系统及其制导控制方式,火箭弹可分为无控火箭弹㊁简易控制火箭弹和制导火箭弹[1⁃2]㊂1 1㊀火箭弹弹道特性分析火箭弹的运动过程分为滑轨段㊁主动段和被动段㊂滑轨段指火箭弹后定心部脱离滑轨端点之前的运动过程;主动段指后定心部脱离滑轨端点到发动机停止工作之间的飞行过程,是火箭弹上升段的一部分;被动段指主动段结束后的惯性飞行过程,一般分为平飞段和再入段㊂侦察探测火箭弹,通常发生在其主动段和被动段㊂在火箭弹射击弹道平面内,主动段受火箭发动机推力作用,被动段受自身重力和空气阻力作用,常规无控火箭弹被动段的弹道特性与常规炮弹的外弹道特性基本相似,弹道高度一般不超过30km;采用空气舵控制的制导火箭弹,在主动段和被动段都具有机动变轨能力,最大弹道高度一般不超过50km㊂无控火箭弹可在射程范围内通过调整射角控制射程(射角范围一般在15ʎ 55ʎ),大射角对应远射程,小射角对应近射程;火箭弹发动机关机后,由于空气阻力和重力作用,到达弹道最高点位(居射程中点以远位置)后,火箭弹受重力作用快速下降,再入角大于发射角,弹道呈不对称曲线形状,如图1所示㊂图1㊀火箭弹弹道特性示意图1 2㊀火箭弹速度特性分析发射后的主动段,火箭弹线的高度和速度单调增大,发动机熄火时达到速度极大值;发动机熄火后高度. All Rights Reserved.第6期指挥控制与仿真59㊀继续单调增大,速度单调递减,直到弹道顶点过后的一段行程达到极小值;转入降落阶段,火箭弹受重力作用速度开始递增,重力与空气阻力平衡时再次达到速度极大值(最大马赫数可达2 0 3 0),如图2所示㊂图2㊀火箭弹速度变化规律示意图2㊀火箭弹雷达可探测性分析借鉴反火箭弹成功实践经验,防空兵侦察探测火箭弹,要求雷达具备很强的机动能力㊁较远的发现距离㊁很高的角度和距离分辨力,以及同时多目标跟踪能力,通常使用C波段或者X波段二维相控阵雷达[3]㊂2 1㊀火箭弹雷达散射特性分析火箭弹壳体材料一般采用优质金属或新型复合材料,大气层内高速飞行的火箭弹战斗部壳体外面通常涂覆热防护层㊂目前,火箭弹的壳体都没有进行隐身设计,有利于使用雷达探测跟踪目标[3⁃4]㊂火箭弹可以简化为圆柱形弹体与锥形战斗部的组合体目标,其弹体圆柱的长度通常为米级,弹体圆柱半径通常为数厘米至数十厘米;战斗部的锥体高度通常为数十厘米量级㊂侦察探测火箭弹,在其上升段和平飞段(如图3中所示位置1㊁2)可简化为侧视姿态照射的金属圆柱体目标,在其再入段(如图3中所示位置3)可简化为正视姿态照射的金属圆锥体目标㊂图3㊀侦察探测火箭弹的照射姿态变化示意图若火箭弹弹体最小结构尺寸为A,雷达波长为λ,对于C波段或者X波段雷达,火箭弹的雷达散射截面积一般都满足2πA>>λ的 光学区 散射规律条件㊂若火箭弹弹体长度为L,弹体半径为r,地面雷达照射上升段至平飞段火箭弹的视线与弹体法线的夹角为θ,则火箭弹的雷达散射截面积为σ=2πL2rλcosθsin2πLλæèçöø÷sinθ2πLλæèçöø÷sinθéëêêêêùûúúúú(1)其中,L㊁r和λ的单位均为m㊂对于常规火箭弹结构尺寸的目标,在C波段或者X波段雷达波长范围内,如图3中位置3所示,迎头正视姿态照射金属圆锥体的雷达散射截面积最小㊂若战斗部锥体高度为h,则迎头照射下的雷达散射截面积为σ=πr4σ2(2)其中,h的单位为m㊂按外军现役典型火箭弹的C波段雷达散射截面积概算,如表1所述㊂表1㊀外军现役典型火箭弹雷达散射截面积概算火箭弹弹体柱长L/m弹体半径r/m弹头锥高h/m雷达散射截面积σ/m2上升段平飞段θ=30ʎθ=60ʎ再入段龙卷风7 00 150 613 151 170 0044海马斯3 60 110 344 350 580 0040㊀由表1可见,沿弹道由远及近运动过程中,火箭弹的雷达散射截面积逐渐减小,上升段和平飞段的雷达散射截面积均为平方米量级;再入段的雷达散射截面积最小,为10-3平方米量级(分析计算表明,雷达照射方向垂直于战斗部锥体母线附近时有平方米量级峰值)㊂2 2㊀跟踪火箭弹稳定性分析如表1所述,在由远及近运动过程中,由于地面雷达对其照射姿态变化,火箭弹的雷达散射截面积变化约为103量级;距离越近,火箭弹的雷达散射截面积越小,雷达回波信号越弱㊂在战场环境和装备技术状态不变的条件下,雷达照射空中目标收到的回波信号功率,与目标的雷达散射截面积成正比,与目标距离的四次方成反比,即pr=KσR4(3)其中,K为雷达技术状态常数;R为目标距离,单位为m㊂本文以70km射程的火箭弹为例,取其最大发射. All Rights Reserved.60㊀秦正威,等:野战防空侦察探测火箭弹需求研究第43卷角55ʎ,弹道最高点为30km,弹道最高点距离其弹着点30km,再入段雷达照射方向与弹体纵轴平行时的距离为20km;火箭弹侦察雷达阵地位于火箭弹弹着点附近,其天线海拔高度为5m㊂设火箭弹侦察雷达迎头照射20km处 海马斯 火箭弹的回波信号功率为pr0,则照射30km处平飞段和70km处上升段火箭弹的回波信号功率如表2㊂表2㊀不同飞行阶段火箭弹回波强度比较飞行阶段再入段σʈ0 004Rʈ20km平飞段σʈ0 58Rʈ42km上升段σʈ4 35m2Rʈ70km回波功率pr07 5pr07 2pr0㊀可见,在火箭弹飞行过程中,上升段和平飞段的回波信号都比再入段的回波信号强㊂侦察探测飞行过程中的火箭弹,只要雷达技术能力满足跟踪信号功率最弱的迎头状态火箭弹的要求,就能够远距离发现并连续跟踪上升段和平飞段的火箭弹,为战斗指挥提供稳定可靠的预警情报,从而为拦截抗击提供连续的目标指示㊂3㊀侦察探测火箭弹能力需求分析[5⁃6]远距离发现并连续跟踪火箭弹,是实施指挥拦截行动的前提㊂除了高机动能力等野战防空装备通用要求,侦察探测火箭弹的战术能力,主要包括威力范围㊁分辨力㊁测量精度㊁情报数据率㊁跟踪容量(多目标跟踪能力)等㊂3 1㊀威力范围使用二维相控阵雷达侦察探测火箭弹,其威力的范围应当包括方位覆盖范围㊁俯仰覆盖范围㊁最大发现距离㊂1)方位覆盖范围遂行野战防空任务侦察探测火箭弹,为了满足快速转换侦察监视方位区的需要,侦察雷达应当采用 全方位机械扫描+方位区相控阵扫描 体制㊂相控阵扫描的方位区范围,应当能够根据侦察任务和对情报数据率的要求装定,单向监视方位应当达到45ʎ 60ʎ㊂2)俯仰覆盖范围一般地,火箭弹的发射角为15ʎ 55ʎ,再入角大于发射角㊂为了保证发现后能够连续跟踪目标,侦察雷达探测跟踪火箭弹,相控阵扫描的最大俯仰覆盖范围应当达到80ʎ以上㊂为了适应复杂地形下侦察探测其他类型目标需要,应当能够根据侦察监视任务,装定俯仰覆盖范围的起始下界(通常为俯视角)㊂3)最大发现距离如前所述,在满足跟踪再入段火箭弹(雷达散射截面积最小)前提下,远距离发现上升段/平飞段火箭弹的最大距离,应当满足拦截弹在有效杀伤区远界达成首次拦截射击的需要,即RȡRI+V(tS+tC+tA)(4)其中,R的单位为km;RI为拦截弹有效杀伤区远界,单位为km;tS为侦察雷达从发现目标到输出情报的反应时间,tC为射击指挥过程时间,tA为火力分队搜索截获目标发射拦截弹的过程时间,单位均为m;V为火箭弹的最大飞行速度,单位为km/s㊂3 2㊀分辨力通常,火箭弹都采取多发齐射方式实施射击㊂侦察探测火箭弹,必须具备足够的同时多目标分辨能力,准确判明目标数量,为射击指挥分配目标和协调火力实施有效拦截抗击,提供精准情报㊂为此,野战防空侦察雷达,应当运用中小口径天线窄波束技术提高角分辨力,运用宽频带脉冲压缩技术提高距离分辨力,运用频域滤波技术提高多普勒分辨能力,达成下述综合高分辨能力:1)能够分辨单炮顺序发射的前后火箭弹;2)能够分辨多炮同时发射的并行火箭弹等㊂3 3㊀测量精度侦察探测火箭弹,必须建立精准的弹道轨迹,以便拦截火力分队能够在短促的射击窗口,按照目标指示快速截获目标㊂为了建立精准的火箭弹轨迹,侦察雷达测量火箭弹坐标的精度应当达到以下要求:1)距离测量误差不大于米量级;2)方位角㊁俯仰角测量误差不大于0 1ʎ量级㊂3 4㊀情报数据率发现火箭弹㊁确定敌方火箭炮阵地概略方向后,侦察雷达应当按照战斗方案,缩小监视方位区范围,适度提升监视的俯仰角下界,集中资源侦察监视火箭弹群目标㊂为了尽早建立精准的火箭弹弹道,为判定其弹着点位置,评估危害程度,定下拦截抗击决心提供精准情报,为拦截抗击提供尽量宽裕的反应时间,侦察雷达应当尽量缩短测量火箭弹坐标的时间间隔,提高火箭弹情报数据率㊂按照火箭弹的射程和最大飞行速度等,侦察监视火箭弹㊁测量火箭弹坐标的时间间隔应当不超过秒量级㊂. All Rights Reserved.第6期指挥控制与仿真61㊀3 5㊀跟踪容量侦察探测火箭弹时,侦察雷达一个扫描周期能够跟踪的目标容量,应当不小于一个火箭炮战术分队一次齐射的火箭弹总量㊂如果火箭炮战术分队编制的火箭炮数量为A1,单炮载弹容量为A2,则在监视火箭弹的方位俯仰范围上,侦察雷达一个扫描周期必须跟踪火箭炮的目标容量为CȡA1ˑA2(5)例如,Y军现役 龙卷风 火箭炮营编制9门火箭炮,每门炮载12枚火箭弹,则侦察雷达跟踪火箭弹的目标容量应当大于108批㊂3 6㊀目标处理能力以色列EL/M-2084多任务相控阵雷达目标处理能力为每分钟200枚炮弹㊁1200个飞机和导弹目标㊂火箭炮打击目标时火力密集度较大㊂以 龙卷风 为例,战时一个营编配18门火箭炮,每门火箭炮装载12枚火箭弹,一个营一分钟内可以发射216枚火箭弹㊂侦察探测火箭弹等弹道类目标,目标处理能力每分钟应不小于200个㊂4㊀结束语侦察探测火箭弹能力是陆战场拦截抗击火箭弹威胁的基础能力要素之一,以色列 铁穹 武器系统的EL/M-2084多功能雷达在实战中发挥了根本性的支撑作用㊂受水平限制,文中难免错误之处,敬请读者批评指正㊂参考文献:[1]㊀汤祈忠,李照勇,王文平,等.野战火箭弹技术[M].北京:国防工业出版社,2015.[2]㊀韩子鹏,等.弹箭外弹道学[M].北京:北京理工大学出版社,2014.[3]㊀胡晓磊.反火箭弹㊁炮弹和迫击炮弹防空导弹发展动向分析[J].地面防空武器,2016,47(2):15⁃17.[4]㊀肖咏捷.以色列 铁穹 反火箭弹系统[J].外军炮兵,2010(10):19⁃22.[5]㊀吴映峰,俞一鸣,徐立新.外军反火箭弹㊁炮弹㊁迫击炮弹防空武器系统对我陆军防空装备建设启示[J].炮兵防空兵装备技术研究,2013(4):18⁃22.[6]㊀王鹏,刘震宇,李巍,等.整体式制导火箭弹射击效率分析[J].指挥控制与仿真,2019,41(2):66-69.(责任编辑:胡志强). All Rights Reserved.。
c3i的应用原理
C3I的应用原理1. 什么是C3I?C3I是指指挥、控制、通信和情报,是军事领域中常用的术语。
它是一种信息系统集成架构,用于支持军事组织的决策制定和指挥控制活动。
C3I系统通过集成各种不同的硬件和软件组件,实现了实时的信息共享和协同作战。
2. C3I的应用原理C3I的应用原理基于以下几个关键步骤:步骤1:指挥指挥是军事活动的核心,而C3I系统的首要目标就是提供高效的指挥能力。
C3I系统通过实时获取、处理和分析各种来源的情报信息,将其转化为对军事活动的指示和指导,从而支持决策制定和任务规划。
步骤2:控制控制是指基于指挥的指示和指导,对军事活动进行实时监控和管理。
C3I系统通过集成各个军事单位的传感器、通信设备和控制系统,实现对各个战术单元的远程控制和协同作战。
这种实时的控制能力,使得指挥官能够随时调整战术和战略的部署,并作出相应的决策。
步骤3:通信通信是C3I系统的关键组成部分,它通过提供高效的通信网络,实现各个军事单位之间的实时信息交流。
C3I系统利用最先进的通信技术,如卫星通信、射频通信和光纤通信等,提供高带宽和低延迟的数据传输能力,以确保指挥官和战略制定者之间的实时通信。
步骤4:情报情报是支持军事决策和指挥控制的重要信息来源。
C3I系统通过集成各种情报来源,如侦察、监视和情报研究等,提供及时、准确和全面的情报支持。
情报分析人员利用C3I系统提供的工具和技术,对收集到的情报数据进行分析和评估,以提供决策制定者所需的情报产品。
3. C3I的优势C3I系统具有以下几个优势:1.实时性:C3I系统提供实时的指挥控制能力,使得指挥官能够迅速做出决策和调整战术。
2.协同作战:C3I系统实现了各个军事单位之间的协同作战,能够提高作战效率和命中率。
3.情报支持:C3I系统集成了各种情报来源和分析工具,为决策制定者提供全面的情报支持。
4.通信能力:C3I系统提供高带宽、低延迟的通信能力,确保各个战术单元之间的实时通信。
关于坦克火控系统误差的探讨

172研究与探索Research and Exploration ·工程技术与创新中国设备工程 2020.09 (下)坦克火控系统即控制坦克中武器(多为火炮)的瞄准发射系统,应用火控系统的目的,在于大幅度减小坦克武器在使用过程中的反应时间,提升目标攻击的准确性,若按照瞄准控制的方式进行划分,我国坦克火控系统常见的有指挥仪式、扰动式以及非扰动式三类。
在对坦克火控系统进行实际应用的过程中,经常会因为各类原因造成误差,使得攻击目标精确性不足,因此,了解坦克火控系统误差形成原因,并通过相关手段来降低误差,实现目标的精准打击,是相关工作人员要重点关注的一个问题。
1 坦克火控系统的误差源分析以目前国内常见的坦克火控系统作为研究对象,笔者总结了其常见误差源,从坦克火控系统的工作流程和功能层面出发,分析出了坦克火控系统常见误差源树状图,之后根据两种原则,对这些误差源进行分类分析。
第一,基于可控制性和不可控制性原则,把误差源划分成火控系统设计人员控制中的误差与火控系统设计人员不能控制的误差,针对不能控制的误差,不能基于系统设计人员的要求对坦克进行控制,所以在开展系统设计工作和设备选取工作时,设计人员一定要独立考虑;第二,基于误差源的特性,将其划分为系统误差与随机误差,通常情况下,坦克火控系统中的系统误差能够在校验环节进行消除。
整体来讲,在坦克火控系统中,常见的误差源包含有初速度计算误差、距离测算误差、跟踪误差、火控系统稳定性误差等10余种误差。
值得注意的是,针对系统误差和不可控制误差,尽管不对其开展精确度分配,但是,在对系统的总误差进行确定以后,需要对这些误差对射击精度造成的影响开展研究,以此,消除误差影响,提升关于坦克火控系统误差的探讨丁思源1,曾梁杭2(1.中国人民解放军32272 部队31分队,甘肃 武威 733000;2.中国人民解放军32272部队41分队,四川 什邡 618400)摘要:基于笔者个人经验,首先就坦克火控系统误差形成的常见原因进行分析,并在此基础上,分析了坦克火控系统的误差传递关系,最后,通过相关的案例讲解,论述了降低坦克火控系统误差的有效方法,希望能够为从事相关领域研究的技术人员提供一定有价值的参考。
防空C^3I系统作战效能评估

Vo13 No 1 . 1。 . J nu r 2 0 a a y, 0 6
火 力 与 指 挥 控 制
Fie Co r la d Co r nt o n mm a d Co t o n nrl
第3 1卷
第 1期
20 0 6年 1月
2 建 立 评 估模 型
2 1 各属 性效 能评估 方 法的选 取 . 第 一步 : 用 概率 分 析 法建 立 评 估 系统属 性 模 运 型中 的 P ( 、 , ) P ( 模 型 ; )P ( @ 、 @)
MTB —— 指 挥站 的平 均故 障 间隔 时间 ; F MTTR—— 指 挥站 的平 均修 复 时间 。 可信 赖性 矩 阵为 :
确 立 评估 指标 体 系
防 空 C l系统 的 主要 功 能 是 收 集 、 理 、 输 、 处 传 显示 敌 机信 息 , 于 我军 的集 火单 位迅 速发 现 、 捉 便 捕
已经 跨人 了信 息化 时代 , 因此 , 集指 挥 、 控制 、 信与 通 情报 为一 体 的 C I 系统在 作 战 中的重 要性 越 来 越 突
所 示 的作战 效 能评估 体 系 。
防空 C I 统作 战 效能 评 估 的总 准则 是新 系 统 系
维普资讯
马立涛 , : 等 防空 C I 3 系统作战效能评估
( 总第 3 —0 5 1 3)
・3 5・
进 行 比较全 面 的评 估 , 照 1 6 年 美 国工业 界 武器 参 95 系统效 能 咨询委员 会 ( EI WS AC) 中 1 0多位 科 学 集 0 家研究 后提 出 的 E—A ・ ・ D C效 能模 型 , 系本评 联
关键词 : 防空 C I 统 , 战 效 能 . E AC方 法 系 作 WS I 中 图 分 类 号 : J 6 . T 784 文献标识码 : A
观灭火花点对噪声图片满足点布尔达式判断战舰误判造成损失

观灭火花点对噪声图片满足点布尔达式判断战舰误判造成损失随着科技的不断发展,人们对图像处理和分析的需求日益增加。
其中一个重要的应用领域是军事领域的图像处理,尤其是在战争和军事行动中。
本文将讨论一个与战舰误判相关的问题,即如何通过观察灭火花点,并利用点布尔达式判断噪声图片,在战争中避免因误判造成的损失。
战舰误判是指由于噪声图片造成的错误判断而导致的战舰识别和目标定位的错误。
在军事行动中,误判可能会使军方采取错误的行动,将友军误认为敌方目标,或者将敌方目标误认为友军,造成不可挽回的损失。
为了解决战舰误判问题,我们需要关注灭火花点的观察和噪声图片的处理。
灭火花点是一种可靠的指示火灾的信号,通常由火药、炸药或其他易燃物质产生的光闪所引起。
通过观察灭火花点的形状、颜色和持续时间,可以对火灾进行初步判断,并及时采取相应的灭火措施。
但是,在观察灭火花点过程中,我们必须考虑到可能存在的噪声图片。
噪声图片是指在拍摄或传输过程中可能出现的图像失真、干扰或其他不良影响,可能使观察者误判目标。
为了避免战舰误判造成的损失,可以利用点布尔达式对观察到的灭火花点和噪声图片进行判断。
点布尔达式是一种基于点集和逻辑运算的判断方法,通过对点集进行运算和比较,判断目标是否满足特定的条件。
在图像处理和分析中,可以将观察到的灭火花点和噪声图片转化为点集,并利用点布尔达式对它们进行判断。
例如,可以通过检测灭火花点的形状和颜色,与预先设定的条件进行比较,确定是否为真正的灭火花点;同时,还可以检测噪声图片中可能存在的干扰和失真,通过比较灭火花点和噪声图片的相似性或差异性,判断是否存在误判的可能性。
通过观察灭火花点、处理噪声图片和利用点布尔达式进行判断,可以有效地避免战舰误判造成的损失。
然而,要实现这一目标,还需要基于先进的图像处理和分析技术,包括模式识别、机器学习和人工智能等方法。
模式识别技术可以帮助我们建立灭火花点的模型,并将其与噪声图片进行对比,以确定是否存在误判。
道听途说中国C4ISR

中国的C3I.C4I系统什么是C4I系统?它是指指挥、控制、通讯、电脑和情报的集成,以前一直被运用在军事领域,它以计算机为核心,综合运用各种信息技术,对军队和武器进行指挥与控制。
C3I 是指挥,控制,通信和情报的英文缩写(Command,Contral,Communi Cation,intelligence ) C4I是在前者的基础上加上一个计算机(Computer)。
那么,中国的C4I系统,神秘吗?今天的60周年国庆节,预警机梯队首次公开亮相阅兵式。
空警-2000和空警-200两型国产预警机,分别作为领队梯队长机和预警机梯队长机,先后飞越天安门广场,首次公开亮相,接受检阅。
1架空警2000与空军"八一"飞行表演队的8架歼-7GB护卫机组成9机楔队,为空中领队梯队;2架空警-200与空军某航空兵师的6架歼-11组成两个楔队,为空中梯队第二梯队。
由此,可以看出,中国的C4I系统的重要性。
在军事领域中,C4I的应用是重要的。
尽管北大西洋公约组织(北约)所享有的许多成功50多年来,有指挥,控制,通信,计算机和情报(C4I)的互操作性,应该承认和纠正不足之处。
至于北约继续修改其对集体安全的使命在欧洲的最新理论,这些挑战的C4I互操作性的重要性日益增加。
C4I的互操作性很重要,因为它是一种粘合剂,结合先进的经营原则,反过来是理论基础。
北约的存在互操作性挑战的C4I在冷战和行动在波斯尼亚和科索沃的课程。
北约的C4I互用性的挑战是可以克服的通过加强联合特遣部队(联合特遣部队)的概念,选择的国家提供一个架构的C4I能力未来作战指挥员,确保未来的成员国在适当的C4I标准化协定的遵守情况,并在网络中心投资战(网络中心战)。
北约的未来作战任务的成功,可以很好地确定在解决互操作性挑战的C4I放在今天的努力。
中国领导层分别为党、政、军系统建立相互独立的通信系统,为此成立了原邮电部和隶属于中央军委的通信部,以及覆盖全国的通信网络;该网络包括一个公共通信网(国家通信网)和两个专用通信网(军用通信和铁路通信网)。
两次转火射击时防空C3I系统火力分配模型研究

两次转火射击时防空C3I系统火力分配模型研究
王海峰;刘顺利;王炳华
【期刊名称】《地面防空武器》
【年(卷),期】2005(000)002
【摘要】引言火力的最优分配是作战计划的重要内容,是防空兵射击指挥的核心问题,也是防空C3I系统中辅助决策技术重要的组成部分,它随着防空C3I系统的发展而发展。
防空火力分配有时又称防空作战中的武器目标分配(Weapon Target Assignment,简称WTA),
【总页数】3页(P44-46)
【作者】王海峰;刘顺利;王炳华
【作者单位】防空兵指挥学院在读硕士研究生;防空兵指挥学院教授;防空兵指挥学院副教授
【正文语种】中文
【中图分类】E9
【相关文献】
1.基于辅助决策系统舰炮防空火力分配模型
2.弹炮结合防空武器系统火力分配模型
3.防空系统目标威胁评估与火力分配模型
4.防空中存在两次转火射击时的火力分配模型
5.基于遗传算法的要地防空武器系统最优火力分配模型研究
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
野战防空C 3I 系统的目标指示雷达测量误差对目标火力分配的影响齐和平(北方自动控制技术研究所 太原 030006) 摘 要 以某野战防空C 3I 系统为背景,针对目标雷达的测量误差对系统目标火力分配的影响进行了分析,在系统分别配置警17雷达和387雷达的情况下,通过仿真给出目标落入武器单元火力范围的最大概率和概率分布曲线图,提出系统建模应考虑的一些因素,为大系统的性能分析和总体建模奠定了基础。
关键词 测量误差 乘同余 优化分配环 正态分布Influence of Field Antiaircraft C 3I System Target Indication Radar Measurement Error on Target Fire DistributionQi Heping(North Automatic Control Technology Institute ,Tai yuan 030006) ABSTRACT With the backg ro und o f a Field Antiaircra ft C 3I System ,th e paper ana ly ses the influ-ence o f tar ge t radar m ea sur ement e rro r o n sy stem ta rg et fir e distributio n,and the max imum pro ba bility and pro bability distributio n curv e diag ra m w hich targ et falls in th e fire ar ea o f weapon unit,ar e g v en by means of simula tio n w hen the system is equipped w ith w ar ning radar 17and 387,and then presents the considera tions a bo ut sy stem modeling ,which will lay a founda tion fo r system perfo rma nce analysis and system mo deling.KEY WORDS measurement er ro r,multipilicativ e co ng r uential metho d,dist ributio n loo p o f o pti-mi zatio n ,no r ma l distributio n1 问题的提出在空袭和防空的对抗中,对防空系统来说,敌机的运动参数(高度、速度、航向等)是其目标火力分配的重要依据,而目标运动参数的可信度直接依赖于目标指示雷达测量误差的大小。
在假定目标做等速直线运动的条件下,建立了目标火力分配数学模型,并确定37炮和57炮火力单元的优化分配环。
采用环内同一目标的连续两个测量点的信息,分别对系统配备警17雷达和387雷达的情况下,进行雷达测量误差对目标穿越火力圈影响的仿真计算,给出落入37炮和57炮火力单元范围的最大概率和概率分布曲线。
根·32·(总第21-272) 火力与指挥控制 第21卷 第4期收稿日期 1995-08-11 1996-05-20修改据仿真结果,可以看出目标指示雷达的测量误差对火力分配的影响,从而提出了提高系统目标火力分配正确率的方法。
给系统雷达选型、系统建模和系统性能指标的分析提供有力依据。
2 仿真模型的建立(1)目标运动模型和雷达测量模型目标运动模型:假定目标做等速直线运动,雷达在二维平面坐标系内测量目标(无高度测量)。
X i (K +1)=H X i (K )+U i (K )其中 X i =〔X i 1(K ),X i 2(K ),X i 3(K ),X i 4(K )〕TH =1ΔF 000100001ΔF 0001下标i 为第i 批目标,X i 1、X i 2分别表示X 方向的位置和速度。
X i 3、X i 4分别表示Y 方向的位置和速度。
ΔF 为雷达采样周期,U i (K )为目标运动的随机误差,假定它为零均值,方差为Q i (K )的高斯白噪声。
雷达测量模型:令 Z i (K )表示K 时刻第i 批目标的坐标测量值,则第i 批目标的观测方程为:Z i (K )=H X i (K )+V i (K )其中 X i =〔X i 1(K ),X i 2(K ),X i 3(K ),X i 4(K )〕TH =10000010V i (K ),也假定它是高斯白噪声过程。
则:E 〔V i (K )〕=0E 〔V i (K )V Ti (K )〕=V r i (K )W kl其中 W kl =0 k ≠l1 k =lV ri (K )表示第i K 时刻测量的均方差。
(2)(0,1)均匀分布随机数的产生利用乘同余法按下列公式计算出(0,1)均匀分布的随机序列。
X i =C ·X i -1 (MO DM ) X i =X i /M i =1,2,3……n 式中,C 为乘数,M 为模,初始值X 0为种子。
它们皆为正整数。
在系统仿真中选取:X 0=1 C =75=16807 M =231-1(3)正态分布N (_,W )随机数的产生利用中心极限定理近似抽样的方法,产生N (_,W )随机数。
选取n 个(0,1)均匀分布随机数r 1,r 2……r n ,则可得:X =(∑ni =1r i -ng /2) n /12渐有正态分布N (0,1)。
在本系统仿真中,选取n =12有: X =∑12i =1r i-6.0·33· 野战防空C 3I 系统的目标指示雷达测量误差对目标火力分配的影响(总第21-273)则由公式 Y =W X +_可得N (_,W )分布的随机数Y 。
3 仿真计算和流程图(1)目标指示雷达技术指标警17雷达:387雷达:测距误差 δr =2km 测角误差 δθ=20采样周期 T =20s测距误差 δr =0.5km 测角误差 δθ=0.50采样周期 T =10s (2)目标分配终了线选定: t 37=129s t 57=137s 目标运动速度 V =250m /s (3)仿真算法假定条件:·目标是飞向火力单元。
·坐标系是以火力中心为坐标原点的二维平面坐标系。
采用环内同一目标的两个测量点的信息,分别对系统配备警17雷达和387雷达的情况下,进行雷达测量误差对目标穿越火力圈影响的仿真算法如下:①选定参数选定:仿真计算一组理想测量点(两个)所在直线航路穿越火力圈的概率所需重复仿真10000次。
m ax n 为仿真次数计数器,其初始值为10000。
V =250m /s 表示目标的运动速度。
警17雷达:387雷达:测距误差 δr =2km 测角误差 δθ=20采样周期 T=20s测距误差 δr =0.5km 测角误差 δθ=0.50采样周期 T=10s t 37=129s t 57=137sr37,57 表示火力圈半径(37炮为2.5km 、57炮为4km )。
minn 为一组理想测量点(两点)所在航路穿越火力圈次数的计数器,其初始值为零。
②选取两个标准的测量点A (r 1,T 12),B (r 2,T 12)距离:r 1=t 37(或t 57)*V ; r 2=r 1+V *T 方位:T 12=c /4 (或为0~2c之间的某一常数)③确定初始的两个理想测量点A 1(r 11,T 11),B 1(r 22,T 22)距离:r 11=r 1r 22=((V *T *co s (T 11-T )+r 11*cos (T11))2+(V *T *sin (T 11-T )+r 11*sin (T 11))2)1/2方位:T11=T 12T22=a rctg ((V *T *sin (T 11-T )+r 11*sin (T 11))/(V *T *cos (T 11-T )+r 11*co s (T11)))·34·(总第21-274)野战防空C 3I 系统的目标指示雷达测量误差对目标火力分配的影响 式中:T 表示目标理想直线航路与最近理想点和火力范围中心连线的夹角,逆时针为正,顺时针为负。
取:T 的初始值为c /4④产生N (0,1)分布的四个随机数X 1,X 2,Y 1,Y 2,给两个理想测量点加噪声。
见仿真模型。
⑤计算航路捷径 PP ⑥假如航路捷径 PP ≤r37,57,则计数器 minn <=minn +1计数器 max n <=m axn -1⑦假如max n =0,则转⑧,否则转④⑧计算T 时,航路穿越37火力圈(或57火力圈)的概率 P =minn /10000⑨ΔT =0.01; T <=T -ΔT ; 假如T ≤-c /4,结束。
否则转③。
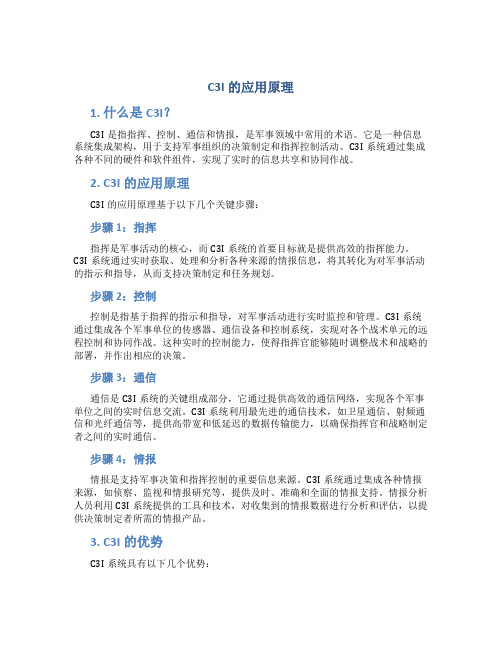
(4)仿真流程图如图1图1仿真流程图N计算目标落入火力范围的概率Y判断总计数器是否到?N穿越计数器加(minn)1Y判断是否穿越火力圈?计算火力单元到航路的距离PP 加噪声取理想值距离、方位产生N (W ,_)分布随机数产生N (0,1)分布随机数产生(0,1)均匀分布随机数初始化参数4 仿真结果目标落入火力单元范围最大概率如下表:警17雷达W r =2k m W θ=2°P 370.186P 570.259W r =1k m W θ=1°P 370.337P 570.461387雷达W r =0.5km W θ=0.5°P 370.359P 570.486W r =0.25km W θ=0.25°P 370.638P 570.802 警17雷达测量目标落入火力单元范围的概率分布曲线图如图2。
图中:纵坐标P 表示目标落入武器单元火力圈的概率。
横坐标α表示目标理想直线航路与最近理想点和火力范围中心连线的夹角,逆时针为正,顺时针为负。
曲线①为警17雷达测量的目标落入37炮火力单元的概率分布。
曲线②为警17雷达测量的目标落入57炮火力单元的概率分布。
曲线③为警17雷达测量的目标(假定W θ=10、W r =1km )落入37炮火力单元的概率分布。
曲线④为警17雷达测量的目标(假定W θ=10、Wr =1km )落入57炮火力单元的概率分布。
曲线⑤为387雷达测量的目标落入37炮火力单·35· 野战防空C 3I 系统的目标指示雷达测量误差对目标火力分配的影响(总第21-275)图2 概率分布曲线图元的概率分布。