PWM(Pulse Width Modulation)控制技术
PWM控制原理

PWM控制原理PWM(Pulse Width Modulation)即脉宽调制技术,是一种通过改变脉冲信号的高电平时间占比来实现对电压、电流等信号的模拟调节的技术方法。
PWM控制原理主要包括:PWM信号生成、PWM信号加载、PWM信号解调和PWM控制应用等几个方面。
本文将从每个方面进行详细介绍。
1.PWM信号生成PWM信号生成通常通过计数器和比较器实现。
计数器负责产生一个周期性的方波信号,而比较器则用来与一个可调节的占空比参数进行比较生成PWM信号。
计数器的周期取决于所需的PWM信号频率,而占空比参数则决定了高电平的时间。
2.PWM信号加载PWM信号加载是指将PWM信号加载到需要控制的设备或器件上,例如将PWM信号加载到电机驱动模块上,通过改变PWM信号的占空比来调节电机转速。
通常会使用MOSFET或IGBT等功率开关器件来实现PWM信号的加载。
这些功率开关器件的开关速度要足够快,以充分利用PWM信号的调节性能。
3.PWM信号解调PWM信号解调是指将PWM信号转换成模拟量信号,以便进行后续的处理或控制。
解调的过程通常使用低通滤波器来平滑PWM信号,滤除高频成分,从而得到一个平均值相对稳定的模拟量信号。
解调的输出值与PWM信号的占空比成正比,因此可以实现对信号的精确控制。
4.PWM控制应用PWM控制的应用非常广泛,常见的应用包括:电机控制、照明调光、直流-直流转换器、交流-直流转换器、无线通信、数字音频等。
在电机控制中,PWM信号的占空比可以决定电机的转速,同时也可以实现对电机的逆变控制,例如反转、制动等功能。
在照明调光中,PWM信号的占空比可以决定灯光的亮度,通过改变PWM信号的占空比,可以实现灯光的调光功能。
在直流-直流转换器中,PWM信号可以控制开关管的开关频率和占空比,通过改变占空比可以实现输出电压或电流的调节。
总结:PWM控制利用脉冲信号的高电平时间占比来实现对电压、电流等信号的模拟调节。
PWM 控制技术

图15 SPWM 的谐波分析
5.7 异步调制和同步调制
异步调制 载波和信号波不保持同步的调制方式称为异步调制 。 保持载波频率fc固定不变,因而当调制波频率fr变化时,载波比N是变化的。 在信号波的半个周期内,PWM的脉冲个数不固定,相位也不固定,正负半 周期的脉冲可能不对称,半周期内前后1/4周期的脉冲也可能不对称。 同步调制 载波比N等于常数,并在变频时使载波和信号波保持同步的方式称为同步 调制。 三相SPWM逆变电路中,通常公用一个三角载波,且取载波比N为3的整数 倍,以使三相输出波形严格对称,为了保证双极性调制时每相波形的正、 负半波对称,N应取奇数。 信号波一个周期内输出的脉冲数是固定的,脉冲相位也是固定的。 分段同步调制 将异步调制和同步调制结合起来,成为分段同步调制方式。 在不同的频率段采用异步,在同一频段采用同步,结合了异步和同步的优 点。
V1m =
Vdc ×m 2
FFT window: 2 of 6 cycles of selected signal 100 50 0 -50 -100
0.07
0.075
0.08 0.085 Time (s)
0.09
0.095
0.07
0.075
0.08 0.085 Time (s)
0.09
0.095
Fundamental (60Hz) = 158.7 , THD= 137.34%
图3 SPWM的原理
5.3 SPWM 控制方法
计算法:实时在线计算困难 调制法(三角波交点法) 把希望输出的波形作为调制波, 等腰三角形作为载波,通过对载 波的调制得到希望输出的PWM波 形。 1)单极性调制:三角波载波在半个 周期内只在1个方向变化,所得 的PWM波形也只能在单极性范围 内变化。 优点:电压电流波动小,开关器 件的电压、电流应力小 缺点:生成困难 2)双极性调制:三角波载波在半个 周期内在正负2个方向变化,所 得的PWM波形也在2个方向变化。 缺点:电压电流波动较大,器件 缺点 电压、电流应力较大 优点:生成容易 优点
PWM控制——精选推荐
本文详细阐述pwm的原理: PWM(Pulse Width Modulation)控制——脉冲宽度调制技术,通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。
PWM控制技术在逆变电路中应用最广,应用的逆变电路绝大部分是PWM型,PWM 控制技术正是有赖于在逆变电路中的应用,才确定了它在电力电子技术中的重要地位。
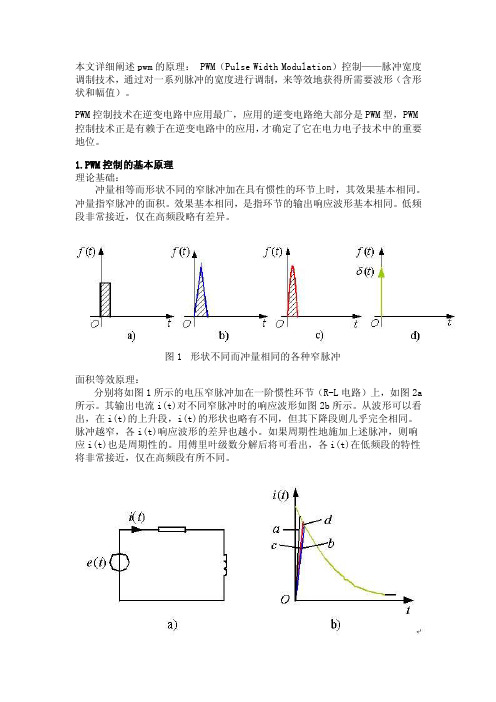
1.PWM控制的基本原理理论基础:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
冲量指窄脉冲的面积。
效果基本相同,是指环节的输出响应波形基本相同。
低频段非常接近,仅在高频段略有差异。
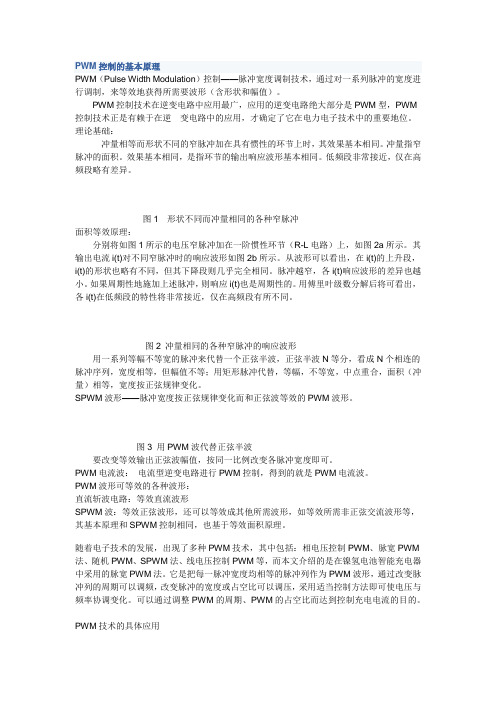
图1形状不同而冲量相同的各种窄脉冲面积等效原理:分别将如图1所示的电压窄脉冲加在一阶惯性环节(R-L电路)上,如图2a 所示。
其输出电流i(t)对不同窄脉冲时的响应波形如图2b所示。
从波形可以看出,在i(t)的上升段,i(t)的形状也略有不同,但其下降段则几乎完全相同。
脉冲越窄,各i(t)响应波形的差异也越小。
如果周期性地施加上述脉冲,则响应i(t)也是周期性的。
用傅里叶级数分解后将可看出,各i(t)在低频段的特性将非常接近,仅在高频段有所不同。
图2 冲量相同的各种窄脉冲的响应波形用一系列等幅不等宽的脉冲来代替一个正弦半波,正弦半波N等分,看成N个相连的脉冲序列,宽度相等,但幅值不等;用矩形脉冲代替,等幅,不等宽,中点重合,面积(冲量)相等,宽度按正弦规律变化。
SPWM波形——脉冲宽度按正弦规律变化而和正弦波等效的PWM波形。
图3 用PWM波代替正弦半波要改变等效输出正弦波幅值,按同一比例改变各脉冲宽度即可。
PWM电流波:电流型逆变电路进行PWM控制,得到的就是PWM电流波。
PWM波形可等效的各种波形:直流斩波电路:等效直流波形SPWM波:等效正弦波形,还可以等效成其他所需波形,如等效所需非正弦交流波形等,其基本原理和SPWM控制相同,也基于等效面积原理。
2. PWM相关概念占空比:就是输出的PWM中,高电平保持的时间与该PWM的时钟周期的时间之比如,一个PWM的频率是1000Hz,那么它的时钟周期就是1ms,就是1000us,如果高电平出现的时间是200us,那么低电平的时间肯定是800us,那么占空比就是200:1000,也就是说PWM的占空比就是1:5。
PWM的控制

第14章
PWM的控制
14.4 程序编写 案例:是一个LED 灯从亮到暗,再从 暗到亮。
流程图如 右图
THANK YOU VERY MUCH !
本章到此束, 谢谢您的临!
PWM的控制
面积等效原理:
分别将如图1所示的电压窄脉冲加在一阶惯性 环节(R-L电路)上,如图2a所示。其输出电流 i(t)对不同窄脉冲时的响应波形如图2b所示。从 波形可以看出,在i(t)的上升段,i(t)的形状也略 有不同,但其下降段则几乎完全相同。脉冲越窄, 各i(t)响应波形的差异也越小。如果周期性地施 加上述脉冲,则响应i(t)也是周期性的。用傅里 叶级数分解后将可看出,各i(t)在低频段的特性 将非常接近,仅在高频段有所不同。
位
7
6
CR
5
-
4
-
3
-
2
-
1
0
符号 CF
CCF1 CCF0
第14章
PWM的控制
描述 PCA计数器阵列溢出标志 PCA计数器阵列运行控制位
CCON 寄存器的具体描述
位 7 6 1 0 符号 CF CR
5-2 -
保留为将来之用
CCF1 PCA模块1中断标志 CCF0 PCA模块0中断标志
第14章
PWM的控制
4
3 2 1 0
CAPNn 负捕获。下降沿有效
MATn T0Gn PWMn 匹配 翻转 脉宽调制模式。
ECCFn 使能CCFn中断
第14章
PWM的控制
(2)STC12C5410AD单片机实现PWM的原理 当CL SFR的值小于{EPCnL,CCAPnL}时,输出 为低。当PCA CL SFR的值大于或等于 {EPCnL,CCAPnL}时,输出为高。当CL的值由 FF变为00溢出时, {EPCnH,CCAPnH}的内容装 载到{EPCnL,CCAPnL}中。这样就可以实现无干 扰地更新PWM,要使用PWM模式,模块 CCAPMn寄存器PWMn和ECOMn位必须复位。
第6章 PWM控制技术

6-22
10、换流(换相)方式的分类。 11、单相半桥电压型逆变电路的电路图,波形,及工作原理。 12、单相全桥电压型逆变电路的电路图,波形,及工作原理。(非移相调压 方式)。 13、单相桥式电流型逆变电路的电路图,及其对负载的要求。 14、电压型逆变电路中反馈二极管的作用是什么?为什么电流型逆变电路中 没有反馈二极管? 15、PWM控制的基本原理。 16、同步调制,异步调制、分段同步调制的原理。
uo总可得到Ud和零两 种电平。
uo负半周,让V2保持 通,V1 ,V4保持断, 只控制V3。uo可得-Ud 和零两种电平。
图6-4 单相桥式PWM逆变电路
6-11
6.2.1 计算法和调制法
(2)调制原理
设调制信号ur为正弦波;载波信号uc为三角波。 利用ur和uc的交点时刻控制IGBT的通断。
ur正半周,V1保持通,V2保持断。
和单极性PWM控制方式对应,也是 在ur和uc的交点时刻控制IGBT的通断。
在ur的半个周期内,三角波载波不再是单 极性,而是有正有负,所得PWM波也有 正有负,其幅值只有±Ud两种电平。
u ur uc
ur正负半周,对各开关器件的控制规律相 同。
当ur >uc时,给V1和V4导通信号,给V2 和V3关断信号。 如io>0,V1和V4通,如io<0,VD1和V3导通信号,给V1 和V4关断信号。 如io<0,V2和V3通,如io>0,VD2和 VD3通,uo=-Ud 。
6-14
6.2.1 计算法和调制法
4)双极性PWM控制方式(三相桥逆变)
三相的PWM控制 公用三角波载波uc 三相的调制信号urU、 urV和urW依次相差 120°
图6-7 三相桥式PWM型逆变电路
PWM控制的基本原理
PWM控制的基本原理PWM(Pulse Width Modulation)控制——脉冲宽度调制技术,通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。
PWM控制技术在逆变电路中应用最广,应用的逆变电路绝大部分是PWM型,PWM 控制技术正是有赖于在逆变电路中的应用,才确定了它在电力电子技术中的重要地位。
理论基础:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
冲量指窄脉冲的面积。
效果基本相同,是指环节的输出响应波形基本相同。
低频段非常接近,仅在高频段略有差异。
图1形状不同而冲量相同的各种窄脉冲面积等效原理:分别将如图1所示的电压窄脉冲加在一阶惯性环节(R-L电路)上,如图2a所示。
其输出电流i(t)对不同窄脉冲时的响应波形如图2b所示。
从波形可以看出,在i(t)的上升段,i(t)的形状也略有不同,但其下降段则几乎完全相同。
脉冲越窄,各i(t)响应波形的差异也越小。
如果周期性地施加上述脉冲,则响应i(t)也是周期性的。
用傅里叶级数分解后将可看出,各i(t)在低频段的特性将非常接近,仅在高频段有所不同。
图2 冲量相同的各种窄脉冲的响应波形用一系列等幅不等宽的脉冲来代替一个正弦半波,正弦半波N等分,看成N个相连的脉冲序列,宽度相等,但幅值不等;用矩形脉冲代替,等幅,不等宽,中点重合,面积(冲量)相等,宽度按正弦规律变化。
SPWM波形——脉冲宽度按正弦规律变化而和正弦波等效的PWM波形。
图3 用PWM波代替正弦半波要改变等效输出正弦波幅值,按同一比例改变各脉冲宽度即可。
PWM电流波:电流型逆变电路进行PWM控制,得到的就是PWM电流波。
PWM波形可等效的各种波形:直流斩波电路:等效直流波形SPWM波:等效正弦波形,还可以等效成其他所需波形,如等效所需非正弦交流波形等,其基本原理和SPWM控制相同,也基于等效面积原理。
随着电子技术的发展,出现了多种PWM技术,其中包括:相电压控制PWM、脉宽PWM 法、随机PWM、SPWM法、线电压控制PWM等,而本文介绍的是在镍氢电池智能充电器中采用的脉宽PWM法。
PWM控制原理
负载电流为正的区间,V1 和V4导通时,uo等于Ud 。
图6-4 单相桥式PWM逆变电路
一. 计算法和调制法
2.调制法
V4关断时,负载电流通过V1和VD3续流,uo=0 负实载际电上流io从为V负D的1和区V间D4,流过V1,和仍V4有仍u导o=通U,d 。io为负,
VV43关和断VDV13续开流通,后u,o=io0从。 u电o平总。可得到Ud和零两种
求得a1、a2和a3 。
O a1
a2 a3
p
2p
wt
-Ud
图6-9 特定谐波消去法的输出PWM波形
一. 计算法和调制法
在三相对称电路的线电压中,相电压所含的3次谐波相
消去互两抵种消。特定频率的谐波
可考虑消去5次和7次谐波,得如下联立方程:
a1
2Ud
p
(12cosa1
2cosa2
2cosa3)
a5
2Ud
5p
(12cos5a1
2cos5a2
2cos5a3)
0
(6-5)
a7
2Ud
7p
(12cos7a1
2cos7a2
2cos7a3)
0
给定a1,解方程可得a1、a2和a3。a1变,a1、a2和a3也相
应改变。
一. 计算法和调制法
一般在输出电压半周期内,器件通、断各k次, 考虑到PWM波四分之一周期对称,k个开关时 刻可控,除用一个自由度控制基波幅值外,可
wt
-Ud
-Ud
图6-5 单极性PWM控制方式波形 图6-5 双极性PWM控制方式波形
对照上述两图可以看出,单相桥式电路既可采取单 极性调制,也可采用双极性调制,由于对开关器件通断 控制的规律不同,它们的输出波形也有较大的差别。
实验4 PWM控制技术

实验4 PWM(Pulse Width Modulation)控制技术一、占空比(Duty Ratio,Duty Cycle):指脉冲信号的通电时间与通电周期之比。
(高电平在一个周期之内所占的时间比率。
)PWM是一种对模拟信号进行数字编码的方法。
通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。
二、MSP430的定时器资源:WDT,Basic Timer,Timer_A(该系列器件均有),Timer_B,Timer_D,实时时钟等。
Timer_A0 Timer0_A5(5个CCR)Timer_A1 Timer1_A3(3个CCR)Timer_A2 Timer2_A3(3个CCR)三、Timer_A Registers:TAxCTL Timer_Ax Control RegisterTAxCCTL0 - TAxCCTL6 Timer_A捕获/比较控制寄存器0-6TAxR Timer_Ax Counter RegisterTAxCCR0 - TAxCCR6 Timer_A捕获/比较寄存器0-6TAxEX0 Timer_A扩展寄存器0TAxIV Timer_A中断向量寄存器四、(1)TAxCTL,Timer_Ax Control RegisterTASSEL bit9-bit8 Timer_A clock source selectID bit7-bit6 Input divider(1/2/4/8)MC bit5-bit4 Mode controlTACLR bit2 Timer_A clearTAIE bit1 Timer_A interrupt enableTAIFG bit0 Timer_A interrupt flag以上位寄存器的复位值均为0h(2)TAxCCTLn,Timer_Ax Capture/Compare Control n RegisterCM bit15-bit14 Capture modeCCIS bit13-bit12 Capture/compare input selectSCS bit11 Synchronize capture sourceSCCI bit10 Synchronized capture/compare inputCAP bit8 Capture mode(0,比较模式;1,捕获模式)OUTMOD bit7-bit5 Output modeCCIE bit4 Capture/compare interrupt enable(0,禁止;1,使能)CCI bit3 Capture/compare inputOUT bit2 OutputCOV bit1 Capture overflow flagCCIFG bit0 Capture/compare interrupt flag以上位寄存器的复位值均为0h(3)TAxR,Timer_Ax Counter Register,the count of Timer_A(4)TAxCCRn,Timer_A Capture/Compare n Register比较模式:TAxCCRn与TAxR比较捕获模式:满足捕获条件时,硬件自动将计数器TAxR值写入TAxCCRn(5)TAxEX0,Timer_Ax Expansion 0 RegisterTAIDEX bit2-bit0 Input divider expansion(1/2/3/4/5/6/7/8)(6)TAxIV,Timer_Ax Interrupt Vector Register,bit15-bit0[由于,Timer_A的中断,可由计数器溢出引起,也可来自捕获/比较器REG,因此] TAxIV用于确定Timer_A中断请求的中断源。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 6-5 单极性 PWM 控制方式波形
4
nx0952@
nx0952@
双极性 PWM 控制方式(单相桥逆变): 在 ur 半个周期内,三角波载波有正有负,所得 PWM 波也有正有负。在 ur 一周期内, 输出 PWM 波只有±Ud 两种电平,仍在调制信号 ur 和载波信号 uc 的交点控制器件通断。ur 正负半周,对各开关器件的控制规律相同,当 ur >uc 时,给 V1 和 V4 导通信号,给 V2 和 V3 关断信号,如 io>0,V1 和 V4 通,如 io<0,VD1 和 VD4 通, uo=Ud,当 ur<uc 时,给 V2 和 V3 导通信号,给 V1 和 V4 关断信号,如 io<0,V2 和 V3 通,如 io>0,VD2 和 VD3 通, uo=-Ud。波形见图 6-6。 单相桥式电路既可采取单极性调制,也可采用双极性调制。
a
sin nt
(6-3)
式中,an 为
an
4
2
0
u (t ) s i n ntdt
图 6-9,能独立控制 a1、a2 和 a3 共 3 个时刻。该波形的 an 为 a2 U 4 a1 U d an [ sin ntdt ( d sin nt ) dt 0 a 1 2 2
nx0952@
nx0952@
PWM 控制技术
主要内容:PWM 控制的基本原理、控制方式与 PWM 波形的生成方法,PWM 逆变电 路的谐波分析,PWM 整流电路。 重点:PWM 控制的基本原理、控制方式与 PWM 波形的生成方法。 难点:PWM 波形的生成方法,PWM 逆变电路的谐波分析。 基本要求: 掌握 PWM 控制的基本原理、 控制方式与 PWM 波形的生成方法, 了解 PWM 逆变电路的谐波分析,了解跟踪型 PWM 逆变电路,了解 PWM 整流电路。 PWM(Pulse Width Modulation)控制——脉冲宽度调制技术,通过对一系列脉冲的宽 度进行调制,来等效地获得所需要波形(含形状和幅值)。第 3、4 章已涉及这方面内容: 第 3 章:直流斩波电路采用,第 4 章有两处: 4.1 节斩控式交流调压电路,4.4 节矩阵式变 频电路。 本章内容 PWM 控制技术在逆变电路中应用最广,应用的逆变电路绝大部分是 PWM 型,PWM 控制技术正是有赖于在逆变电路中的应用,才确定了它在电力电子技术中的重要地位。 本章主要以逆变电路为控制对象来介绍 PWM 控制技术,也介绍 PWM 整流电路
图 6-4 单相桥式 PWM 逆变电路
单极性 PWM 控制方式(单相桥逆变): 在 ur 和 uc 的交点时刻控制 IGBT 的通断。ur 正半周,V1 保持通,V2 保持断,当 ur>uc 时使 V4 通,V3 断,uo=Ud,当 ur<uc 时使 V4 断,V3 通,uo=0。ur 负半周,V1 保持断,V2 保持通,当 ur<uc 时使 V3 通,V4 断,uo=-Ud,当 ur>uc 时使 V3 断,V4 通,uo=0,虚线 uof 表示 uo 的基波分量。波形见图 6-5。
6
nx0952@
nx0952@
计算法中一种较有代表性的方法,图 6-9。输出电压半周期内,器件通、断各 3 次(不 包括 0 和 π),共 6 个开关时刻可控。为减少谐波并简化控制,要尽量使波形对称。 首先,为消除偶次谐波,使波形正负两半周期镜对称,即:
1 PWM 控制的基本原理
理论基础: 冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。冲量指窄 脉冲的面积。效果基本相同,是指环节的输出响应波形基本相同。低频段非常接近,仅在 高频段略有差异。
图 6-1 形状不同而冲量相同的各种窄脉冲
面积等效原理: 分别将如图 6-1 所示的电压窄脉冲加在一阶惯性环节(R-L 电路)上,如图 6-2a 所示。 其输出电流 i(t)对不同窄脉冲时的响应波形如图 6-2b 所示。从波形可以看出,在 i(t)的上升 段,i(t)的形状也略有不同,但其下降段则几乎完全相同。脉冲越窄,各 i(t)响应波形的差异
图 6-8 三相桥式 PWM 逆变电路波形
防直通死区时间: 同一相上下两臂的驱动信号互补,为防止上下臂直通造成短路,留一小段上下臂都施 加关断信号的死区时间。死区时间的长短主要由器件关断时间决定。死区时间会给输出 PWM 波带来影响,使其稍稍偏离正弦波。 特定谐波消去法(Selected Harmonic Eliminatio个正弦半波,正弦半波 N 等分,看成 N 个相连的 脉冲序列,宽度相等,但幅值不等;用矩形脉冲代替,等幅,不等宽,中点重合,面积(冲 量)相等,宽度按正弦规律变化。 SPWM 波形——脉冲宽度按正弦规律变化而和正弦波等效的 PWM 波形。
图 6-3 用 PWM 波代替正弦半波
Ud Ud a2 2 sin ntdt a23 ( 2 sin nt )dt ] 2U d (1 2 cos n 1 2 cos n 2 2 cos n 3 ) n
a3
(6-4)
式中 n=1,3,5,… 确定 a1 的值,再令两个不同的 an=0,就可建三个方程,求得 a1、a2 和 a3。 消去两种特定频率的谐波: 在三相对称电路的线电压中,相电压所含的 3 次谐波相互抵消,可考虑消去 5 次和 7 次谐波,得如下联立方程: 2U d a1 (1 2 cos 1 2 cos 2 2 cos 3 )
2 PWM 逆变电路及其控制方法
目前中小功率的逆变电路几乎都采用 PWM 技术。 逆变电路是 PWM 控制技术最为重要 的应用场合。本节内容构成了本章的主体 PWM 逆变电路也可分为电压型和电流型两种,目前实用的几乎都是电压型。 (1)计算法和调制法 1、计算法 根据正弦波频率、幅值和半周期脉冲数,准确计算 PWM 波各脉冲宽度和间隔,据此控 制逆变电路开关器件的通断,就可得到所需 PWM 波形。 缺点:繁琐,当输出正弦波的频率、幅值或相位变化时,结果都要变化 2、调制法 输出波形作调制信号, 进行调制得到期望的 PWM 波; 通常采用等腰三角波或锯齿波作 为载波;等腰三角波应用最多,其任一点水平宽度和高度成线性关系且左右对称;与任一 平缓变化的调制信号波相交,在交点控制器件通断,就得宽度正比于信号波幅值的脉冲, 符合 PWM 的要求。 调制信号波为正弦波时,得到的就是 SPWM 波;调制信号不是正弦波,而是其他所需 波形时,也能得到等效的 PWM 波。 结合 IGBT 单相桥式电压型逆变电路对调制法进行说明:设负载为阻感负载,工作时 V1 和 V2 通断互补,V3 和 V4 通断也互补。 控制规律: uo 正半周,V1 通,V2 断,V3 和 V4 交替通断,负载电流比电压滞后,在电压正半周, 电流有一段为正,一段为负,负载电流为正区间,V1 和 V4 导通时,uo 等于 Ud,V4 关断时, 负载电流通过 V1 和 VD3 续流,uo=0,负载电流为负区间,io 为负,实际上从 VD1 和 VD4 流
图 6-6 双极性 PWM 控制方式波形
双极性 PWM 控制方式(三相桥逆变):见图 6-7。 三相 PWM 控制公用 uc,三相的调制信号 urU、urV 和 urW 依次相差 120°。 U 相的控制规律: 当 urU>uc 时,给 V1 导通信号,给 V4 关断信号, uUN´=Ud/2,当 urU<uc 时,给 V4 导通信号, 给 V1 关断信号, uUN´=-Ud/2;当给 V1(V4)加导通信号 时,可能是 V1(V4)导
7
nx0952@
nx0952@
2U d (1 2 cos 5 1 2 cos 5 2 2 cos 5 3 ) 0 5 2U d a7 (1 2 cos 7 1 2 cos 7 2 2 cos 7 3 ) 0 7 a5
1
nx0952@
nx0952@
也越小。如果周期性地施加上述脉冲,则响应 i(t)也是周期性的。用傅里叶级数分解后将可 看出,各 i(t)在低频段的特性将非常接近,仅在高频段有所不同。
图 6-2 冲量相同的各种窄脉冲的响应波形
3
nx0952@
nx0952@
过,仍有 uo=Ud,V4 断,V3 通后,io 从 V3 和 VD1 续流,uo=0,uo 总可得到 Ud 和零两种电 平。 uo 负半周,让 V2 保持通,V1 保持断,V3 和 V4 交替通断,uo 可得-Ud 和零两种电平。
u(t ) u(t )
(6-1)
图 6-9 特定谐波消去法的输出 PWM 波形
其次,为消除谐波中余弦项,使波形在半周期内前后 1/4 周期以 π/2 为轴线对称。
u(t ) u( t )
四分之一周期对称波形,用傅里叶级数表示为:
(6-2)
u (t )
n n 1, 3, 5 ,...
(6-5)
给定 a1,解方程可得 a1、a2 和 a3。a1 变,a1、a2 和 a3 也相应改变。 一般,在输出电压半周期内器件通、断各 k 次,考虑 PWM 波四分之一周期对称,k 个 开关时刻可控,除用一个控制基波幅值,可消去 k-1 个频率的特定谐波,k 越大,开关时 刻的计算越复杂。 除计算法和调制法外,还有跟踪控制方法,在 6.3 节介绍 (2)异步调制和同步调制 载波比——载波频率 fc 与调制信号频率 fr 之比,N= fc / fr。根据载波和信号波是否同步 及载波比的变化情况,PWM 调制方式分为异步调制和同步调制: 1、异步调制 异步调制——载波信号和调制信号不同步的调制方式。 通常保持 fc 固定不变,当 fr 变化时,载波比 N 是变化的。在信号波的半周期内,PWM 波的脉冲个数不固定,相位也不固定,正负半周期的脉冲不对称,半周期内前后 1/4 周期 的脉冲也不对称。当 fr 较低时,N 较大,一周期内脉冲数较多,脉冲不对称的不利影响都 较小,当 fr 增高时,N 减小,一周期内的脉冲数减少,PWM 脉冲不对称的影响就变大。因 此,在采用异步调制方式时,希望采用较高的载波频率,以使在信号波频率较高时仍能保 持较大的载波比。 2、同步调制 同步调制——N 等于常数,并在变频时使载波和信号波保持同步。 基本同步调制方式,fr 变化时 N 不变,信号波一周期内输出脉冲数固定。三相,公用一 个三角波载波,且取 N 为 3 的整数倍,使三相输出对称。为使一相的 PWM 波正负半周镜 对称,N 应取奇数。当 N=9 时的同步调制三相 PWM 波形如图 6-10 所示。 fr 很低时,fc 也很低,由调制带来的谐波不易滤除,fr 很高时,fc 会过高,使开关器件 难以承受。为了克服上述缺点,可以采用分段同步调制的方法。 3、分段同步调制 把 fr 范围划分成若干个频段,每个频段内保持 N 恒定,不同频段 N 不同。在 fr 高的频 段采用较低的 N,使载波频率不致过高,在 fr 低的频段采用较高的 N,使载波频率不致过 低。 图 6-11,分段同步调制一例。为防止 fc 在切换点附近来回跳动,采用滞后切换的方法。 同步调制比异步调制复杂,但用微机控制时容易实现。可在低频输出时采用异步调制