8 位MASK 单片机芯片 CM2004
单片机的分类

单片机的分类单片机作为计算机发展的一个重要分支领域,根据目前发展情况,从不同角度单片机大致可以分为通用型/专用型、总线型/非总线型及工控型/家电型。
1.通用型/专用型这是按单片机适用范围来区分的。
例如,80C51是通用型单片机,它不是为某种专用途设计的;专用型单片机是针对一类产品甚至某一个产品设计生产的,例如为了满足电子体温计的要求,在片内集成ADC接口等功能的温度测量控制电路。
2.总线型/非总线型这是按单片机是否提供并行总线来区分的。
总线型单片机普遍设置有并行地址总线、数据总线、控制总线,这些引脚用以扩展并行外围器件都可通过串行口与单片机连接,另外,许多单片机已把所需要的外围器件及外设接口集成一片内,因此在许多情况下可以不要并行扩展总线,大大减省封装成本和芯片体积,这类单片机称为非总线型单片机。
3.控制型/家电型这是按照单片机大致应用的领域进行区分的。
一般而言,工控型寻址范围大,运算能力强;用于家电的单片机多为专用型,通常是小封装、低价格,外围器件和外设接口集成度高。
显然,上述分类并不是惟一的和严格的。
例如,80C51类单片机既是通用型又是总线型,还可以作工控用。
按其它类型分类:8051单片机:8051单片机最早由Intel公司推出,随后Intel公司将80C51内核使用权以专利互换或出让给世界许多著名IC制造厂商,如 Philips 、NEC、Atmel、AMD、Dallas、siemens、Fujutsu、OKI、华邦、LG等。
在保特与80C51单片机兼容的基础上,这些公司容入了自身的优势,扩展了针对满足不同测控对象要求的外围电路,如满足模拟量输入的A/D、满足伺服驱动的PWM、满足高速输入/输出控制的HSL/HSO、满足串行扩展总线I2C、保证程序可靠运行的的WDT、引入使用方便且价廉的Flash ROM等,开发出上百种功能各异的新品种。
这样80C51单片机就变成了众多芯片制造厂商支持的大家族,统称为80C51系列单片机。
Freescale单片机概述.PPT

.
7
第2章 Freescale单片机概述
④子系列型号标志。如GP、GB、GZ等。 ⑤存储器大小。如256表示内部集成256KB的Flash等。 ⑥Flash版本标志,反映不同的擦写电压、时间等。 ⑦工作温度范围标志。“无”表示商用温度范围0℃~70℃;
.
4
第2章 Freescale单片机概述
MC68HCS08系列
MC68HCS08系列单片机采用了比CPU08速度快的S08内核。 有多种电压管理模式,包括具有20nA的power-down模式。 采用“零组件”设计,实现MCU从“STOP”模式的自动启动,电流可降
到0.7mA。 工作电压为2.1V时,CPU和总线速率最高分别可达40MHz与20MHz;工
第2章 Freescale单片机概述
§-1 Freescale单片机发展历程
位数 32
MC68000 MC68020
M.Core PowerPC Core ColdFire
DragonBall
ARM Core
HC16
16
MC6809
HC11
8
MC6800 MC6801 MC6805 HC05
HC12 HC08
5. 以M.Core为CPU的32位单片机 M.Core是Freescale公司自行设计的一款RISC级低功耗32位CPU内 核,性能和功耗方面都优于ARM7。M.Core 仅用了8万个晶体管, 0.25mm工艺下面积只有1.1mm2。M.Core 有较高的码密度和编程 效率,应用程序比其它32位CPU少占用约30%存储空间。该系列 单片机有MMC2001/3、MMC2107、MMC2113/4等型号 。
MASK掩膜单片机解密(芯谷科技)
MASK掩膜单片机解密(芯谷科技)作者:佚名日期:2009年12月12日来源:本站原创内容摘要:MASK掩膜单片机解密是芯片解密技术研究中一个将为特殊的技术研究领域,也是解密业内典型的疑难芯片解密系列之一。
在掩膜单片机解密技术研究中,芯谷科技目前已经取得系列突破,通过独家解密手法,可成功破解典型掩膜芯片,并利用相对应的FLASH芯片来替代原有掩膜芯片,最大限度确保客户项目开发的顺利进行。
MASK掩膜单片机解密是芯片解密技术研究中一个将为特殊的技术研究领域,也是解密业内典型的疑难芯片解密系列之一。
掩膜芯片由生产厂生产时候掩膜制造,不具备读写功能,无法用普通单片机解密的方案进行破解,成为很多解密工程师的一大困扰。
在掩膜单片机解密技术研究中,芯谷科技目前已经取得系列突破,通过独家解密手法,可成功破解典型掩膜芯片,并利用相对应的FLASH芯片来替代原有掩膜芯片,最大限度确保客户项目开发的顺利进行。
以下是芯谷科技目前可解的部分MASK掩膜单片机型号列表,有MASK掩膜单片机解密需求者欢迎与我们联系咨询更多解密详情芯片解密咨询电话:086-0755-********,82816682咨询QQ:10000123Email:xingu2010@H8/38020S - 8KH8/38021S - 12KH8/38022S - 16KH8/38023S - 24KH8/38024S - 32KH8/38073R - 24KH8/38074R - 32KH8/38075R - 40KH8/38076R - 48KH8/38083R - 24KH8/38084R - 32KH8/38085R - 40KH8/38086R - 48KH8/38098 - 96KH8/38099 - 128KH8/38347 60KH8/38327 60KH8/38324 32KH8/38427 60KH8/38424 32KH8/38344 32KH8/38447 60KH8/38444 32KH8/38442 -16KH8/38773 - 24KH8/38775 - 40KH8/38798 - 96KH8/38799 - 128KM30260M3A-系列M30263M3A-系列M30280M8-系列M30281M8-系列M30290M8-系列M30291M8-系列M30620MCP-系列M30622M6P系列M30623M8P系列M30624MGP-系列M30624MHP系列M30626MHP-系列M30626MJP系列M30627MHP系列M3062AMCT系列M306N5MC-XXXGP M306N5MCT系列M30302MAP-系列H8/36010H8/36011 12KH8/36012 16KH8/36013 24KH8/36014 32KH8/36022H8/36023 24KH8/36024 32KH8/36032 16KH8/36033 24KH8/36034 32KH8/36035 40KH8/36036 48KH8/36037 56KH8/36047 64KH8/36048 80KH8/36049 96KH8/36054 32KH8/36057 56KH8/36082H8/36083 24KH8/36084 32KH8/36086 48KH8/36087 56KH8/3652 - 16KH8/3653 - 24KH8/3654 - 32KH8/3655 - 40KH8/3656 - 48KH8/3657 - 60KH8/3682 - 16KH8/3683 - 24KH8/3684 - 32KH8/3685 - 40KH8/3686 - 48KH8/3687 - 56KH8/3690H8/3691 12KH8/3692 16KH8/3693 24KH8/3694 32KH8S/2241 - 32K H8S/2242 - 32K H8S/2243 - 64K H8S/2244 - 64K H8S/2245 - 128K H8S/2256 - 128K H8S/2281 - 64K H8S/2314 - 384K H8S/2316S - 64K H8S/2317S - 128K H8S/2318 - 256K H8S/2319 - 512K H8S/2323 - 32K H8S/2327 - 128K H8S/2328 - 256K H8S/2338 256KH8S/2341 - 32K H8S/2343 - 64K H8S/2344 - 96K H8S/2345 - 128K H8S/2355 - 128K H8S/2357 - 128K H8S/2365 - 256K H8S/2365 - 256KH8S/2612 128k H8/3642 - 16K H8/3643 - 24K。
HOLTEK HT47C10L 8 位 R-F 型低电压 Mask 单片机 说明书

HT47C10L8位R-F 型低电压Mask 单片机特性工作电压1.2V~2.2V 8个双向输入/输出口内置32kHz/128kHz RC 振荡器(掩膜选项128kHz 振荡只提供给EL 输出) 看门狗定时器1K×16程序存储器ROM 32×8数据存储器RAM 一个时基(Time Base) 一组蜂鸣器输出一组EL 输出电压可调的低电压检测功能HALT 和唤醒功能可降低功耗9×4段1/4duty 1/2bias 的液晶显示驱动电路RC 型A/D 转换通道2层硬件堆栈位操作指令查表指令表格内容字长16位当系统时钟为32768Hz 时指令周期为122µs 指令执行时间为1或2个指令周期63条指令44-pin QFP 封装概述HT47C10L 是8位高性能精简指令集单片机单指令周期和两级流水线结构使其适合高速应用的场合特别适用于体温计产品方框图Pad图*IC的衬底要连接到PCB板上的VSS低电平有效输出口每一位都可以作为唤醒输入输出共用引脚一旦PA0/PA1设置为蜂鸣器输出自内部蜂鸣器时钟发生器输出或带上拉电阻的斯密特输入输出口每一位都可以作为唤醒输入输出共用引脚一旦输出其信号来自可由软件设置为输出或带上拉电阻的位双向输入输出口每一位都可以作为唤醒输入输出或带上拉电阻的斯密特输入负电源VCCC1倍压电路VCC=2×VDDVCC LCD 工作电压需要在 C1C2VCC 开关引脚SEG8~SEG0LCD 驱动的和Common 输出正电源 LVD B 低电压检测A/D 转换转换参考电阻连接引脚转换传感器电阻连接引脚带上拉电阻正常使用时不必连接正常使用时不必连接极限参数电源供应电压………….-0.3V~2.5V 储存温度………….-50~125 端口输入电压………….V SS -0.3V~V DD +0.3V 工作温度………..….-40~85注这里只强调额定功率超过极限参数所规定的范围将对芯片造成损害无法预期芯片在上述标示范围外的工作状态而且若长期在标示范围外的条件下工作可能影响芯片的可靠性f=32kHzLVD关闭f OSC=128kHz=32kHzLVD关闭Ω*C=2200pFf OSC=32kHzLVD关闭f OSC=32kHz=32kHzLVD关闭Ω*C=2200pFLVD打开无负载系统关闭f OSC=32kHzLVD关闭f OSC=32kHz=32kHzLVD关闭1.5V — PA0(BZ))PA2(EL1)PA3(EL2)PA4~PA7PA0(BZ))PA2(EL1)PA3(EL2)PA4~PA7口灌电流LVD测试条件最小标准最大单位符号参数V DD条件f32k振荡器时钟(32kHz) 1.5V 26 32 40 kHz f128k振荡器时钟(128kHz) 1.5V 102 128 160 kHz t RES外部复位低电平脉宽 1.5V 100 — — µsf AD A/D转换频率 1.5V — — 50 kHz 系统功能说明指令执行时序HT47C10L系统频率来自32kHz的内部RC振荡芯片将此频率分成四个互不重叠的时钟周期(T1T2T3T4)一个指令周期包括四个系统时钟周期指令的读取和执行是以流水线方式进行的, 这种方式在一个指令周期进行读取指令操作而在下一个指令周期进行解码与执行该指令因此流水线方式使多数指令能在一个周期内执行完成但如果渉及到的指令要改变程序计数器的值就需要花两个指令周期来完成这一条指令指令执行时序程序计数器 — PC10位的程序计数器(PC)用来控制程序存储器ROM中指令执行的顺序最大可以访问1024个地址取得指令码以后程序计数器会自动加一指向下一个指令码的地址但如果执行跳转条件跳跃向PCL赋值子程序调用初始化复位内部中断外部中断子程序返回等操作时PC会载入与指令相关的地址而非下一条指令地址当遇到条件跳跃指令且符合条件时当前指令执行过程中读取的下一条指令会被丢弃取而代之的是一个空指令周期随后才能取得正确的指令反之就会顺序执行下一条指令程序计数器的低字节(PCL)是一个可读写的寄存器(06H)对PCL赋值将产生一个短跳转动作跳转的范围为当前页256个地址当遇到控制转移指令时系统也会插入一个空指令周期程序计数器模式*9 *8 *7 *6 *5 *4 *3 *2 *1 *0 初始化复位0 0 0 0 0 0 0 0 0 0定时/计数器中断0 0 0 0 0 0 0 1 0 0时基中断0 0 0 0 0 0 1 0 0 0条件跳跃PC+2装载PCL *9 *8 @7 @6 @5 @4 @3 @2 @1 @0跳转子程序调用#9 #8 #7 #6 #5 #4 #3 #2 #1 #0从子程序返回S9 S8 S7 S6 S5 S4 S3 S2 S1 S0程序计数器注*9 ~ *0 程序计数器位#9 ~ #0 指令代码位S9 ~ S0 堆栈寄存器位@7 ~ @0 PCL位程序存储器 ROM程序存储器用来存放要执行的指令代码以及一些数据表格和中断入口程序存储器有1024×16位程序存储器空间可以用程序计数器或表格指针进行寻址以下列出的程序存储器地址是系统专为特殊用途而保留的地址000H该地址为程序初始化保留系统复位后程序总是从000H开始执行地址004H该地址为定时/计数器中断服务程序保留当定时/计数器发生溢出如果中断允许且堆栈未满则程序会跳转到004H地址开始执行地址 008H该地址为时基(Time Base)中断服务程序保留当时基发生溢出如果中断允许且堆栈未满则程序会跳转到008H地址开始执行表格区ROM空间的任何地址都可做为查表使用查表指令TABRDC [m](查当前页表格1页=256个字)和TABRDL[m](查最后页表格)会把表格内容低字节传送给[m]而表格内容高字节传送到TBLH寄存器(08H)只有表格内容的低字节被传送到目标地址中而高字节被传送到表格内容高字节寄存器TBLH表格内容高字节寄存器TBLH是只读寄存器表格指针(TBLP)是可读/写寄存器(07H)用来指明表格地址在查表之前要先将表格地址写入TBLP中如果主程序和中断服务程序(ISR)都用到查表指令主程序中TBLH的值可能会因为ISR中执行的查表指令而发生变化产生错误也就是说要避免在主程序和中断服务程序中都使用查表指令但如果必须这样做的话我们可以在查表指令前先将中断禁止在保存了TBLH的值后再开放中断以避免发生错误所有与表格有关的指令都需要两个指令周期的执行时间这里提到的表格区都可以做为正常的程序存储器来使用表格区指令*9 *8 *7 *6 *5 *4 *3 *2 *1 *0[m] P9 P8 @7 @6 @5 @4 @3 @2 @1 @0 TABRDC[m] 1 1 @7 @6 @5 @4 @3 @2 @1 @0 TABRDL表格区注*9~*0表格地址位@7~@0表格指针位P9~P8当前程序指针位堆栈寄存器 STACK堆栈寄存器是特殊的存储器空间用来保存PC的值HT47C10L有2级堆栈堆栈寄存器既不是数据存储器的一部分也不是程序存储器的一部分而且它既不能读出也不能写入堆栈的使用是通过堆栈指针(SP)来实现的堆栈指针也不能读出或写入当发生子程序调用或中断响应时程序计数器(PC)的值会被压入堆栈在子程序调用结束或中断响应结束时(执行指令RET或RETI)堆栈将原先压入堆栈的内容弹出重新装入程序计数器中在系统复位后堆栈指针会指向堆栈顶部如果堆栈已满并且发生了不可屏蔽的中断那么只有中断请求标志会被记录下来而中断响应会被抑制直到堆栈指针(执行RET或RETI指令)发生递减中断才会被响应这个功能可以防止堆栈溢出使得程序员易于使用这种结构同样如果堆栈已满并且发生了子程序调用那么堆栈会发生溢出首先进入堆栈的内容将会丢失只有最后的2个返回地址会被保留数据存储器 RAM数据存储器由548位组成分为两个功能区间特殊功能寄存器和通用数据存储器(328)数据存储器单元大多数是可读/写的但有些只读的特殊功能寄存器包括间接寻址寄存器0(00H)间接寻址指针寄存器0(MP001H)间接寻址寄存器1(02H)间接寻址指针寄存器1(MP103H)存储器段指针寄存器(BP04H)累加器(ACC05H)程序计数器低字节寄存器(PCL06H)表格指针寄存器(TBLP07H)表格内容高字节寄存器(TBLH08H)时基控制寄存器(TBC09H)状态标志寄存器(STATUS0AH)中断控制寄存器(INTC0BH)输入/输出寄存器(PA12H)计数器A高低位字节寄存器(TMRAH20H TMRAL21H)定时/计数器控制寄存器22H)定时计数器高低位字节寄存器(TMRBH23H TMRBL24H)RC型A/D转换控(ADCR25H)掩膜设置寄存器(OPT126H OPT227H)其余在之前的空间保留给系统以后扩展使用读取这些地址的返回值为00H通用数据寄存器地址从60H到用来存储数据和控制信息所有的数据存储器单元都能直接执行算术逻辑递减和循环操作除了一些特殊位外数据存储器的每一位都可由SET[m].i置位或由复位而且都可以通过间接寻址指针MP0和MP1进行间接寻址并无实际的物理区存在都是和单元间接读取00H地址得到的00H间接写入此地址不会产生任何操作间接寻址寄存器之间不支持数据传送功能间接寻址指针MP1用来指出间接寻址中RAM的地址只能用于数据存储器而能用于数据存储器和LCD显示存储器05H做为运算的立即数据存储器之间的数据传送必须经过累加器算术逻辑单元位算术逻辑运算的电路提供有以下功能(ADD ADC SUB SBC DAA)(AND OR XOR CPL)(PL RR RLC RRC)(INC DEC)分支判断(SZ SNZ SIZ SDZ…)ALU不仅可以储存数据运算的结果还会改变状态寄存器的值状态寄存器 STATUS8位的状态寄存器(0AH)由零标志位(Z)进位标志位(C)辅助进位标志位(AC)溢出标志位(OV)暂停标志位(PDF)和看门狗定时器溢出标志位(TO)组成该寄存器不仅记录状态信息而且还控制操作顺序除了PDF和TO标志外状态寄存器的其它位都可以用指令改变任何对状态寄存器的写操作都不会改变PDF和TO的值对状态寄存器的操作可能会导致与预期不一样的结果TO标志只受系统上电看门狗溢出CLR WDT指令或HALT指令的影响PDF标志只受系统上电CLR WDT指令或HALT指令的影响标志位Z OV AC和C反映的是最近一次操作的状态在进入中断程序或子程序调用时状态寄存器不会被自动压入堆栈如果状态寄存器的内容是重要的而且子程序会影响状态寄存器的内容那么程序员必须事先将STATUS的值保存好符号位功能C 0如果在加法运算中结果产生了进位或在减法运算中结果不产生借位,则C 被置位反之C 被清除它也可被循环移位指令影响AC 1如果在加法运算中低4位产生了进位或减法运算中低4位不产生借位则AC被置位反之AC 被清除Z 2 如果算术或逻辑运算的结果为零则Z 被置位反之Z 被清除OV 3如果运算结果向最高位进位但最高位并不产生进位输出则OV 被置位反之OV 被清除PDF 4系统上电或执行CLR WDT 指令PDF被清除执行HALT 指令PDF 被置位TO 5系统上电执行CLR WDT 或HALT 指令TO 被清除WDT定时溢出TO 被置位6 未用读出为07 未用读出为0状态寄存器中断HT47C10L 提供了一个定时器/计数器中断和一个时基中断中断控制寄存器(INTC 0BH) 包含了中断控制位和中断请求标志中断控制位用来设置中断允许/禁止寄存器 位 标志 功能0 EMI 总中断控制位(1=允许0=禁止) 1 ETI 定时/计数器中断控制位(1=允许0=禁止) 2 ETBI 时基中断控制位(1=允许0=禁止) 3 — 未用读出为04 TF 定时/计数器中断请求标志(1=有0=无)5 TBF 时基中断请求标志(1=有0=无)6 — 未用读出为0 INTC(0BH) 7 — 未用读出为0INTC 寄存器只要有中断子程序被服务其余的中断全部都被自动禁止(通过清除EMI 位)这种做法的目的在于防止中断嵌套这时如果有其它中断发生只有中断请求标志会被记录下来如果在中断服务程序中有另一个中断需要响应程序员可以置位EMI 和INTC 所对应的位以便进行中断嵌套如果堆栈已满则中断并不会被响应一直到堆栈指针(SP)发生递减后才会响应如果需要中断立即得到响应应避免堆栈饱和当有中断被服务系统会将程序计数器值压入堆栈然后再跳转至中断服务程序的入口但这时只有程序计数器的内容被压入堆栈如果其它寄存器和状态寄存器的内容会被中断程序改变从而会破坏主程序的控制流程的话程序员应该事先将这些数据保存起来内部定时/计数器中断是由定时/计数器溢出触发的其中断请求标志(TF INTC 的第4位)会被置位如果中断允许且堆栈未满当定时/计数器A 或定时/计数器B 发生中断时会产生地址04H 的子程序调用而中断请求标志TF 和总中断控制位EMI 会被清除以禁止其它中断响应时基中断是由置位时基溢出触发的其中断请求标志(TBF INTC 的第5位)会被置位如果中断允许且堆栈未满当发生时基中断时会产生地址08H 的子程序调用而中断请求标志TBF 和总中断控制位EMI 会被清除以禁止其它中断响应在执行中断子程序期间其它的中断请求会被屏蔽直到执行RETI 指令或EMI 和相关中断控制位被置位(当然此时堆栈未满)如果要从中断子程序返回只要执行RET 或RETI 指令即可其中RETI 指令会自动置位EMI 以允许中断服务而RET 则不会如果中断在两个连续的 T2脉冲的上升沿之间发生且中断响应允许那么在下两个T2脉冲之间该中断会被服务如果同时发生中断请求其优先级如下表示也可以通过设定各中断相关的控制位来改变优先级No. 中断源优先级中断向量a 定时/计数器中断 1 04Hb 时基中断 2 08H振荡电路HT47C10L提供32kHz或128kHz的内部RC振荡(由掩膜选项决定)但系统时钟只能用32kHz在HALT模式下可由掩膜选择RC振荡是否停止用户可以选择128kHz振荡频率作为EL输出看门狗定时器看门狗定时器的时钟来源有两种看门狗振荡器或指令时钟(系统时钟4分频)由掩膜选项设置看门狗定时器主要用来防止程序运行故障和程序跳入一死循环而导致不可预测的结果看门狗定时器可由掩膜选项设置为打开或关闭如果在关闭状态所有与WDT有关的指令操作都是没有作用的在HALT状态时如果RC振荡器继续工作WDT将继续计数而且WDT的计时溢出将导致系统从HALT模式中唤醒在正常运行时WDT溢出会使系统复位并置位TO标志但在HALT模式下WDT溢出只产生热复位只有程序计数器PC和堆栈指针SP被复位要清除WDT的值可以有三种方法外部复位(低电平输入到RES端)清除看门狗指令或HALT指令清除看门狗指令为CLR WDT只要执行CLR WDT指令就会清除WDT否则WDT会由于溢出而使系统复位WDT的溢出周期为f/215f s/216因为CLR WDT指令只能清除最后两级WDT分频器多功能计时器HT47C10L有一个多功能定时器提供看门狗定时器(WDT)和时基产生不同溢出周期此多功能定时器由一个8阶分频器及一个7位预分频器所组成使用的时钟源来自系统时钟多功能定时器同时为LCD 驱动电路和蜂鸣器提供时钟信号(fs/8)多功能计时器时基时基提供一个周期性溢出时间中断它的溢出时间范围为fs/28~fs/215由掩膜选项决定将数据写入RT2RT1和RT0(TBC第210位)之中会产生不同的溢出时间如果时基发生溢出现象则其对应的中断请求标志(TBF)会被置位如果中断允许且此时堆栈尚有空间则产生一个中断服务到08H的地址进入HALT模式后时基仍然工作并且可以唤醒HALT模式如果在进入HALT模式之前将TBF 置1的话则时基信号的溢出就不能唤醒系统RT2 RT1 RT0 Time Base分频级数0 0 0 280 0 1 290 1 0 2100 1 1 2111 0 0 2121 0 1 2131 1 0 2141 1 1 215暂停模式 HALT暂停模式是由HALT指令来实现的暂停模式时系统状态如下由STANDBY位(OPT1的第5位)设置f OSC和f SYS停止或继续振荡但T1将关闭RAM及寄存器的内容保持不变WDT被清除并重新计数所有的输入/输出口都保持其原先状态PDF标志位被置位TO标志位被清除由STANDBY位(OPT1的第5位)设置LCD开/关由STANDBY位(OPT1的第5位)设置时基停止或继续计数PA口唤醒和中断唤醒这两种方式可以视为正常运行的继续如果是输入/输出口唤醒程序即从下一条指令开始运行但如果是从中断唤醒的话此时可能会发生两种情况如果相关中断都被禁止或该中断被允许但堆栈已满程序会从下一条指令开始运行但如果该中断允许且堆栈尚未满则会产生中断响应当进入HALT状态以前某个中断请求位被置位那么系统不能用这个中断来唤醒如果唤醒是由于中断响应的话实际中断子程序的执行会延时一个以上的周期但是如果唤醒导致下一条指令执行那么在一个等待周期结束后指令就立即被执行另外为减少电源损耗在进入暂停模式之前应小心处理所有的输入/输出口复位总共有三种方法会产生初始复位正常运行时由RES引脚发生复位在暂停模式由RES引脚发生复位正常运行时由看门狗定时器溢出发生复位暂停模式中的看门狗定时器溢出与其它系统复位状况不同因为看门狗定时器溢出会执行热复位只有程序计数器PC和堆栈指针SP被复位而系统其它部分都保持原有状态在其它复位状态下某些寄存器不会改变在初始复位时大部分寄存器会复位成初始的状态通过检测PDF和TO标志即可判断出各种不同的复位原因系统复位时各功能单元的状态如下所示程序计数器(PC) 000H中断禁止预分频器清除看门狗定时器时基清除复位后定时器开始计数定时/计数器停止输入/输出口输入模式堆栈指针SP 指向堆栈的顶端定时/计数器HT47C10L提供一个16位定时/计数器可用作双通道的RC型A/D转换器ADC/TM位(ACDR寄存器的第1位)用来决定定时器A和定时器B是用作16位的定时/计数器还是用作RC型A/D转换器当ADC/TM为0时TMRAL TMRAH TMRBL TMRBH组成了16位的定时/计数器TMRBL 和TMRBH组成一个预置寄存器分别用来存放定时/计数器初始值的低字节和高字节定时计数器的时钟源可以是系统时钟(f SYS)或外部信号输入(RCIN引脚的A/D时钟)外部时钟输入允许用户去计算外部事件计数外部RC型的A/D时钟测量时间长度或脉宽或产生一个精确的时基信号总共有六个与定时/计数器有关的寄存器分别是TMRAH([20H])TMRAL([21H])TMRC([22H])TMRBH([23H])TMRBL([24H])和ADCR([25H])写入TMRBL只会将数据写入低字节内部缓冲器而写入TMRBH 则可把数据和低字节内部缓冲器的内容同时写到16位的定时计数器的预置寄存器定时计数器的预置寄存器在对TMRBH 写操作时改变而写TMRBL 将保持预置寄存器的值不变若读取TMRAH 则可将TMRAL 传送至低字节内部缓冲器之中以避免发生计时错误若读取TMRAL 则只读回低字节内部缓冲器的内容也就是说定时/计数器的低字节数据并不能直接读取若欲读取该低字节的数据必须先读取TMRAH 以便使定时/计数器的低字节数据锁存至内部低字节缓冲器之中TMRC 为定时/计数器的控制寄存器用来定义定时/计数器的某些选项定时/计数器的控制寄存器可以定义定时/计数器的工作模式计数允许/禁止以及计数的触发沿写入定时器B 就可以将定时/计数器的初始值放到预置寄存器中而读取定时器A 就可以得到定时/计数器的内容定时器B 是定时/计数器的初始值预置寄存器名称 位 功能0~2 未定义读取时为TE 3 定义定时/计数器TMR 作用沿(0=上升沿作用1=下降沿作用) TON 4 允许/禁止定时器计数(0=禁止1=允许)TN0 TN1 56 定义操作方式(TN1TN0)10=定时器模式(内部时钟f SYS ) 01=外部计数模式(外部时钟RCIN 引脚的A/D时钟输入) 11=脉冲宽度测量模式(RCINf SYS)00=未定义7 未定义读取时为0TMRC 寄存器TN0和TN1用来定义操作模式事件模式是用来计数外部事件这表示时钟来源(A/D 时钟)为外部RCIN 引脚的信号输入定时模式则作为普通定时器使用其时钟来源为内部系统时钟(f SYS )最后脉冲宽度测量模式能够对外部引脚RCIN 的高电平或低电平的持续时间进行测量计数的时钟来源为系统时钟在事件计数A/D 时钟或内部定时模式下一旦定时/计数器开始计数即从定时/计数器的现行内容(TMRAH 和TMRAL)开始计数至FFFFH 若发生溢出计数器即从定时/计数器预置寄存器(TMRBH 和TMRBL)重新装入加载值并同时置位中断请求标志(TF INTC 的第4位)在脉冲宽度测量模式下当TON 和TE 位的值都为1时如果引脚RCIN 接收到一个上升沿信号(如果TE 位的值为0则为下降沿信号)时计数器就会开始数直到RCIN 引脚回到原来的电平为止并且会将TON 位清零测量的结果会依然存放在定时/计数器之中也就是说一次只能计数一个脉冲的宽度而当TON 位重新置位为1只要RCIN 收到跳变脉冲测量就会再次执行下去在脉冲测量模式中定时/计数器并不会根据逻辑电压来计数其根据的标准为信号的转变沿一旦发生计数溢出计数器会从定时/计数器预置寄存器重新装入初值同时还会发出中断请求这种情况和其它两种模式一样若欲启动计数器运行只要将定时器启动位(TON TMRC 的第4位)的值设为1即可在脉冲宽度测量模式中TON 位在测量周期完成后会自动被清除但在其它两种模式中TON 位只可以用软件指令清除若在定时/计数器关闭的情况下将数据写入定时/计数器的预置寄存器同时也会将该数据重新载入定时/计数器之中但若定时/计数器已经开启写入定时/计数器的数据只会保存在定时/计数器的预置寄存器中这时定时/计数器并不会马上被改变而会继续计数下去直到发生溢出为止此时再由预置寄存器装入新的初始值一旦定时/计数器(读取TMRAH)的数据被读取会将时钟禁止以避免发生错误将可能会导致计数错误所以程序员必须考虑清楚才行我们强烈建议在打开定时/计数器前先将要加载的数据写入到TMRBL TMRBH TMRAL 和TMRAH 中去因为在系统初始化后TMRBL TMRBH TMRAL 和TMRAH 的值是未知的下例为定时/计数器的定时模式(禁止中断)clr tmrc clr adcr.1 ; 设置为定时/计数器模式 clr intc.4 ; 清除定时/计数器的中断请求标志位 mov a,low (65536-1000) ; 置定时器初值 mov tmrbl,a ; 计数1000然后定时器溢出mov a,high (65536-1000)mov tmrbh,a定时器时钟来源为f SYS并且允许定时器计数;mova,01010000bmov tmrc,ap10:clr wdt判断定时/计数器的中断请求标志位intc.4 ;snzjmp p10清除定时/计数器的中断请求标志位clr intc.4 ;; 程序继续RC型A/D转换HT47C10L有一个RC型的A/D转换通道包含两个可编程16位向上计数的计数器计数器A的时=32kHz)计数器B的时钟来源可以是外部RC振荡电路当ADC/TM位为1钟来源可以是系统时钟(f时(寄存器ADRC的第1位)TMRAL TMRAH TMRBL TMRBH组成了A/D转换器A/D转换定时器B的时钟来源为RSEN~RCIN振荡器或外部时钟输入(RCIN)定时器A的时钟来源可以通过TN1TN2来设置总共有六个与A/D转换器有关的寄存器分别是TMRAH TMRAL TMRC TMRBH TMRBL和ADRC内部定时器时钟输入到TMRAH和TMRAL中A/D时钟输入到TMRBH和TMRBL中OVB/OVA 位(ADCR寄存器的第0位)用来设置是否采用定时器A或定时器B溢出作为定时/计数器中断信号在A/D 转换模式下当定时器A或定时器B溢出时TON位被清除并且计数器停止计数写入TMRAH/TMRBH就是对定时器A/定时器B设置初值读取TMRAH/TMRBH就是读取定时器A/定时器B的内容写入TMRAL/TMRBL只能将数据写入内部缓冲器的低位字节但若写入的是TMRAH/TMRBH则可将数据和低字节内部缓冲器的内容同时写入定时器A/定时器B(16位)之中定时A/定时器B的内容只在写入TMRAH/TMRBH时改变但若写入TMRAL/TMRBL则可维持定时A/定时器B的内容不受改变若读取TMRAH/TMRBH则可将TMRAL/TMRBL传送至低字节内部缓冲器之中以避免发生计时错误然而若读取TMRAL/TMRBL则只读回低字节内部缓冲器的内容换言之定时器A/定时器B的低字节数据并不能直接读取若欲读取该低字节的数据必须先读取TMRAH/TMRBH以便将定时/计数器A B的低字节数据传送至内部低字节缓冲器之中。
ELAN义隆系列单片机解密
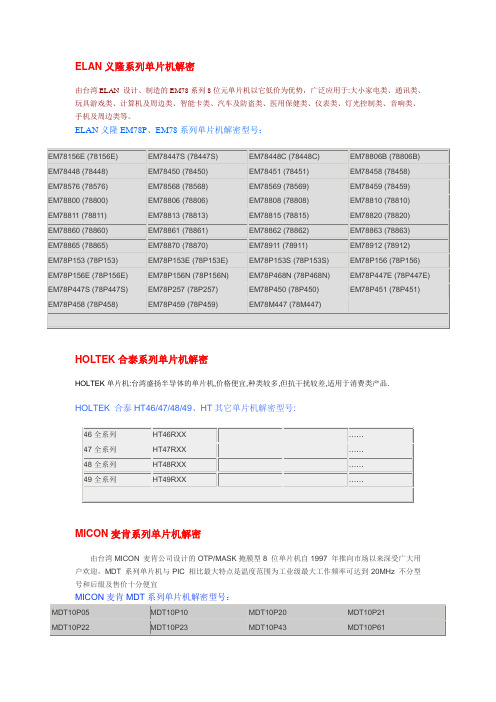
ELAN义隆系列单片机解密由台湾ELAN 设计、制造的EM78系列8位元单片机以它低价为优势,广泛应用于:大小家电类、通讯类、玩具游戏类、计算机及周边类、智能卡类、汽车及防盗类、医用保健类、仪表类、灯光控制类、音响类、手机及周边类等。
ELAN义隆EM78P、EM78系列单片机解密型号:HOLTEK合泰系列单片机解密HOLTEK单片机:台湾盛扬半导体的单片机,价格便宜,种类较多,但抗干扰较差,适用于消费类产品. HOLTEK 合泰HT46/47/48/49、HT其它单片机解密型号:MICON麦肯系列单片机解密由台湾MICON 麦肯公司设计的OTP/MASK掩膜型8 位单片机自1997 年推向市场以来深受广大用户欢迎,MDT 系列单片机与PIC 相比最大特点是温度范围为工业级最大工作频率可达到20MHz 不分型号和后缀及售价十分便宜SONIX松翰系列单片机解密应用领域:电子玩具产品:发声玩具、遥控玩具、音乐玩具、早教机、电子词典、电子故事书等小家电产品:电风扇、电暖器、消毒柜、微波炉、电磁炉、电饭煲、电子炖盅等遥控器:电视、空调、VCD、DVD、机顶盒遥控器充电器:锂电、镍氢、镍铬等智能充电器电子称:厨房称、人体称、口袋称、脂肪称松翰(SONIX)SN8P全系列单片机解密型号:PORTEK普泰系列单片机解密普泰半导体凭借着对产业趋势的掌握及卓越技术之极致深耕,在半导体产业界占一席之地。
从各项消费性电子产品的研发设计,兼顾客户多样化不同的需求;普泰提供了长期及稳定的产品,让客户快速进入市场以确保产品竞争优势,更降低了客户生产成本。
普泰(PORTEK)PTK87XX全系列单片机解密型号:TENX十速系列单片机解密八位单片机可兼容PIC/EMC等芯片,其具备相等或更优越抗干扰功能,适用于频道选择器、天线控制系统、功率放大器、智能型芳香机、超声波测距仪、遥控风扇、负离子风扇、遥控器、电卷发器、电动窗帘、按摩器、按摩椅、按摩鞋、按摩棒、雾化器、豆浆机、打蛋机、咖啡壶、小家电、密码锁、定时器等消费产品应用;四位单片机可实现定时、时钟、温度、湿度、倒计时等不同功能及组合,具标准芯片及依客户所需选择最佳性价比之四位单片机母体设计;USB控制芯片可兼容赛普拉斯( Cypress )系列芯片,适用于游戏机、跳舞毯、功夫机、手柄、鼠标、个人音箱等USB产品,具备优越之性价比。
单片机发展史

单片机发展史单片微型计算机简称单片机,是典型的嵌入式微控制器(MicrocontrollerUnit),常用英文字母的缩写MCU表示单片机,它最早是被用在工业控制领域。
由于单片机在工业控制领域的广泛应用,为使更多的业内人士、学生、爱好者,产品开发人员掌握单片机这门技术,于是产生单片机开发板,比较有名的例如电子人DZR-01A单片机开发板。
单片机由芯片内仅有CPU的专用处理器发展而来。
最早的设计理念是通过将大量外围设备和CPU集成在一个芯片中,使计算机系统更小,更容易集成进复杂的而对体积要求严格的控制设备当中。
INTEL的Z80是最早按照这种思想设计出的处理器,从此以后,单片机和专用处理器的发展便分道扬镳。
早期的单片机都是8位或4位的。
其中最成功的是INTEL的8031,因为简单可靠而性能不错获得了很大的好评。
此后在8031上发展出了MCS51系列单片机系统。
基于这一系统的单片机系统直到现在还在广泛使用。
随着工业控制领域要求的提高,开始出现了16位单片机,但因为性价比不理想并未得到很广泛的应用。
90年代后随着消费电子产品大发展,单片机技术得到了巨大提高。
随着INTELi960系列特别是后来的ARM系列的广泛应用,32位单片机迅速取代16位单片机的高端地位,并且进入主流市场。
而传统的8位单片机的性能也得到了飞速提高,处理能力比起80年代提高了数百倍。
目前,高端的32位单片机主频已经超过300MHz,性能直追90年代中期的专用处理器,而普通的型号出厂价格跌落至1美元,最高端的型号也只有10美元。
当代单片机系统已经不再只在裸机环境下开发和使用,大量专用的嵌入式操作系统被广泛应用在全系列的单片机上。
而在作为掌上电脑和手机核心处理的高端单片机甚至可以直接使用专用的Windows和Linux操作系统。
是的单片机比专用处理器更适合应用于嵌入式系统,因此它得到了最多的应用。
事实上单片机是世界上数量最多的计算机。
现代人类生活中所用的几乎每件电子和机械产品中都会集成有单片机。
ABOV半导体 MC80F0708 0704 MC80F0808 0804 8位单片机 中文手册

A BO V半导体有限公司8位单片机MC80F0708/0704MC80F0808/0804中文手册(1.01版)2008.6ABOV semiconductorwww.abov.co.krMC80F0708/0808修订记录1.01版(6.3.2008)本册修改内部晶振规范1.0版(2.27.2008)在7.4A/D转换特性中增加最小电压参数AV REF。
在7.6典型特征中增加了特性图。
0.5版(9.28.2007)修正8bit计数器说明及图表中的错误。
0.4版(5.5.2007)在1~4MHz,增加操作范围在2.2V~5.5V内。
修正图9-2中的错误:更改R04,R07和PSR1的EC0,EC1为R05,R06和T0O,T2O。
0.3版 (5.2.2007)增加28 QFNP封装。
0.21版(5.2007)增加了T VDD参数规格并且改变了T POR的直流电器特性。
配置选项加入了注释,并对勘误表进行了修正。
0.1版 (8.2006)最初版本1.0版出版发行F A E Tea m©2006A BO V s e m ic ondu c t o r L t d.A ll r ig h t r e s e r v e d.本手册的其它资料由ABOV半导体有限公司韩国办公室或者销售商和代理人提供。
ABOV半导体保留更改数据的权利,并不再另行通知。
这个手册的资料,图表和其它数据都是正确可靠的,但是ABOV半导体没有责任阻止违反专利权或其它权利的个人和团体使用本手册。
注意:本文乃英文版中文翻译,中文文本如有歧义,概以英文为准。
MC80F0708/08081. 概述.............................................................................................................. 描述................................................................................................................. 特性................................................................................................................. 开发工具.......................................................................................................... 订购须知..........................................................................................................2. 系统方框图.....................................................................................................3. 引脚分配.......................................................................................................4. 封装尺寸.......................................................................................................5. 引脚功能.......................................................................................................6. 端口结构.......................................................................................................7. 电器特性.......................................................................................................极限参数.......................................................................................................... 推荐操作参数................................................................................................... A/D转换特性.................................................................................................... DC电器特性.................................................................................................. AC特性............................................................................................................ 典型特性..........................................................................................................8. 存储器结构..................................................................................................... 寄存器.............................................................................................................. 程序存储器........................................................................................................ 数据存储器........................................................................................................ 寻址方式............................................................................................................9. I/O 口............................................................................................................ R0 和R0IO 寄存器........................................................................................... R1 和R1IO 寄存器........................................................................................... R2 和 R2IO 寄存器…………………………………………………………………. R3 和R3IO 寄存器...........................................................................................10. 时钟发生器................................................................................................... 振荡电路..........................................................................................................11. 基本间隔定时器............................................................................................12. 看门狗定时器..............................................................................................13. 定时器/事件计数器....................................................................................... 8位定时/计数器方式....................................................................................... 16位定时/计数器方式...................................................................................... 8位(16位) 比较输出....................................................................................... 8位捕捉方式................................................................................................... 16位捕捉方式.................................................................................................. PWM 方式.........................................................................................................14. 模数转换器...................................................................................................15. 串行输入/输出口(SIO)…………………………………………………………... 发送/接受定时……………………………………………………………………...... 串行I/O的使用………………………………………………………………………..16.蜂鸣器功能…………………………………………………………………………17. 中断............................................................................................................1 1 1 3 4 5 6 7 10 12 16 16 16 16 16 17 18 19 22 22 26 28 33 37 37 40 41 42 42 44 46 49 52 57 58 59 63 66 70 73 74 76 77 79MC80F0708/0808中断优先级 (81)BRK 中断 (83)中断嵌套 (83)外部中断 (85)18. 节电模式操作 (87)Sleep模式 (87)Stop模式 (88)Stop模式(内部RC-振荡看门狗定时器方式) (91)最小消耗电流 (93)19.复位 (95)20.电源失效处理 (97)21.抗干扰措施 (99)振荡噪声保护 (99)振荡失效处理 (100)22.器件配置区 (101)23.仿真器EV A.板安装 (102)A. 指令图 (i)B. 指令集 (ii)MC80F0708/0808 MC80F0708/0704MC80F0808/08041、概述1.1、描述CMOS8位单片机10位A/D转换器MC80F0708(4)/0808(4)是拥有8K(4K)字节FLASH(MTP)程序存储器的CMOS8位单片机。
8位单片机晶圆芯片

8位单片机晶圆芯片摘要:一、单片机晶圆芯片简介1.单片机的概念2.8位单片机晶圆芯片的特点二、8位单片机晶圆芯片的应用领域1.家电控制2.工业自动化3.通信设备4.其他领域三、8位单片机晶圆芯片的优势1.低功耗2.高性价比3.易于开发4.系统稳定性四、我国在8位单片机晶圆芯片领域的发展1.我国市场的需求2.国内企业的技术研发3.政策支持4.与国际水平的差距及未来发展方向正文:一、单片机晶圆芯片简介单片机(Microcontroller Unit,简称MCU)是一种集成了CPU、存储器、外设接口等多种功能于一体的微型计算机系统。
它具有体积小、成本低、功耗低、功能强大等特点,广泛应用于各个领域。
其中,8位单片机晶圆芯片作为单片机的一种,具有处理速度快、运行稳定、成本较低的优势,被广泛应用于家电控制、工业自动化、通信设备等多个领域。
二、8位单片机晶圆芯片的应用领域8位单片机晶圆芯片凭借其优越的性能和成本优势,在众多领域得到了广泛应用。
在家电控制领域,如空调、洗衣机、电视机等家用电器,8位单片机晶圆芯片可以实现智能控制,提高家电性能;在工业自动化领域,如生产线自动化、智能仓储等,8位单片机晶圆芯片可以提高生产效率,降低生产成本;在通信设备领域,如手机、路由器等,8位单片机晶圆芯片可以实现基带处理、信号调制等功能。
此外,8位单片机晶圆芯片还广泛应用于其他领域,如医疗设备、安防监控等。
三、8位单片机晶圆芯片的优势8位单片机晶圆芯片具有以下优势:低功耗,满足节能环保需求;高性价比,降低产品成本;易于开发,提高研发效率;系统稳定性,保证产品长期稳定运行。
这些优势使得8位单片机晶圆芯片在市场竞争中脱颖而出,受到众多企业的青睐。
四、我国在8位单片机晶圆芯片领域的发展我国作为全球最大的电子产品制造基地,对单片机晶圆芯片的需求巨大。
在政策支持和市场需求的双重推动下,我国8位单片机晶圆芯片产业取得了长足发展。
国内企业加大技术研发投入,逐步缩小与国外先进水平的差距。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
8位MASK单片机芯片CM2004 产品规格书v1.0 (2005.12.20)上海贝岭矽创微电子有限公司Shanghai Belling-Systron Microelectronics Co., Ltd.8位MASK单片机芯片CM20041.概述CM2004是一款8位MASK类型的RISC单片机。
该芯片可以凭借极其低廉的价格和相当于PIC16C54/56的性能,广泛地应用到键盘、鼠标、游戏摇杆、电子玩具及其它一些应用场合。
贝岭矽创公司开发了独有的程序代码过滤器RGEN,可以协助用户将针对PIC16C54/56的程序移植到CM2004中去。
CM2004目前已经有千万级的批量应用,性能稳定。
贝岭矽创公司还可根据客户要求修改芯片的端口和附加模块,以适应不同的应用。
2.主要特点● 采用精简指令集(RISC),33条指令● 指令字长12位,全部指令都是单字节指令● 除涉及PC值改变的指令外(如跳转指令等),其余指令都是单周期指令● 哈佛结构,数据总线和指令总线各自独立分开,数据总线宽度为8位,指令总线宽度为12位● 内部程序存储器(MASK ROM)空间为1K,内部普通寄存器组(RAM)为25个● 6个特殊功能寄存器● 2级子程序堆栈● 内部自振式看门狗计时器(WDT)● 内部上电复位电路● 内带一个8位定时器/计数器(RTCC)● XT/LP/RC振荡模式(还可以内置一个2.3MHz左右的RC振荡器)● 12根可独立编程I/O口(可利用/MCLR和TOCKI扩充到14位)● 低功耗设计● 工作电压 2.0V~6.5V● 工作频率为DC~20MHz● 18PIN/16PIN(/MCLR和TOCKI未外引)标准PDIP封装3.管脚排列4.管脚功能说明编号 引脚名 方向 功能描述1 PA2 I/O PORT A位2,双向I/O,可根据客户要求改为开漏输出或纯输入2 PA3 I/O PORT A位3,双向I/O,可根据客户要求改为开漏输出或纯输入4 /MCLR I 外部复位端,“0”有效(内部上拉,不用时可做通用I/O)3 TOCKI I 计数器时钟输入(内部上拉,不用时可做通用I/O)5 VSS - 地6 PB0 I/O PORT B位0,双向I/O,可根据客户要求改为开漏输出或纯输入7 PB1 I/O PORT B位1,双向I/O,可根据客户要求改为开漏输出或纯输入8 PB2 I/O PORT B位2,双向I/O,可根据客户要求改为开漏输出或纯输入9 PB3 I/O PORT B位3,双向I/O,可根据客户要求改为开漏输出或纯输入10 PB4 I/O PORT B位4,双向I/O,可根据客户要求改为开漏输出或纯输入11 PB5 I/O PORT B位5,双向I/O,可根据客户要求改为开漏输出或纯输入12 PB6 I/O PORT B位6,双向I/O,可根据客户要求改为开漏输出或纯输入13 PB7 I/O PORT B位7,双向I/O,可根据客户要求改为开漏输出或纯输入14 VDD - 电源15 OSC2 O 振荡输出端16 OSC1 I 振荡输入端17 PA0 I/O PORT A位0,双向I/O,可根据客户要求改为开漏输出或纯输入18 PA1 I/O PORT A位1,双向I/O,可根据客户要求改为开漏输出或纯输入 5.功能详述CM2004系统框图CM2004下拉、开漏);2) 指令系统译码不同;3) CM2004采用了新工艺,成本更低,功耗等参数更优;4)CM2004的看门狗基本溢出周期为15毫秒;5)CM2004最大可以支持14个独立的I/O。
为了方便用户,贝岭矽创开发了独有的程序过滤器,可以的把针对PIC16C5X的程序代码翻译成适于CM2004运行的程序代码,方便的进行程序移植。
由于寄存器及管脚兼容,CM2004的程序开发可参照PIC16C56执行。
下面仅对看门狗、复位、振荡等电路做重点介绍。
5.1 看门狗看门狗计时器(WATCH DOG TIMER)是一个片内自振式的RC振荡计时器。
即使芯片OSC1/OSC2上振荡停止(例如进入SLEEP),WDT照样保持计数。
WDT计时溢出将产生复位。
WDT基本溢出周期为15ms,如果需要更长的WDT周期,可以把预分频器分配给WDT。
“CLRWDT”和“SLEEP”指令将清除WDT计时器以及预分频(当预分频器分配给WDT时)。
看门狗可以通过MASK方式选择打开或关闭。
5.2 振荡CM2004的振荡电路可以通过MASK方式在RC/XT/LP等方式中选择。
5.2.1 阻容振荡当采用低成本的阻容振荡(RC)方式时,电容已经内置,外接一个10K的上拉电阻可以获得6MHz 左右的振荡频率,此时OSC2输出4分频后的振荡信号。
CM2004 RC振荡模式电路图5.2.2 晶体或陶瓷振荡用石英晶体或陶瓷谐振器振荡是单片机最经典的产生工作时钟方式。
CM2004 有两个引脚 OSC1 和 OSC2 专门给用户外接石英晶体或陶瓷谐振器产生一个高稳定的振荡频率。
CM2004 提供了一个标准的时钟电路,如下图所示。
振荡电路原理图其中 Rf 和 反向器是 MCU 内部集成的。
Rs 是控制激励功率电阻,Rf 是反馈电阻。
在激励和反馈都正常的情况下,其 OSC2 输出的是一个振幅达 4/5 VDD 左右的稳定正弦波。
如发现振幅低于 1/2 VDD ,则认为是欠激励。
如波形严重失真,则认为过激励。
发生欠激励或过激励的现象,可通过Rs 或 再外接一个 Rf(与内部 Rf 并联)调节,过激励增大Rs(范围是0~10K),欠激励减小Rf(范围是1~10M)。
在实际应用中,Rs 往往不接,直接短路,外部也没有 Rf ,这在绝大多数场合都是可以用的。
如果采用455K陶瓷振荡器,建议使用Rs以避免过激励,取值为10K。
如果采用品质稍差的2M陶瓷振荡器,也建议使用Rs。
应用中因为环境、PCB 走线、振荡频率、晶振或陶振参数的不同而导致 Rs、Rf 的取值并不一定完全符合理论,应以实际效果为准。
负载电容的最佳取值主要取决于振荡器参数,一般由振荡器厂家提供,下面仅列出参考值。
陶瓷谐振器负载电容C1、C2 取值陶瓷谐振器振荡频率 C1、C24M - 16M 10P – 22P2M – 4M 15P – 33P< 2M 20P – 100P455K 59P晶体振荡器负载电容C1、C2 取值晶体振荡器 C1、C24M - 16M 15P2M - 4M 20P<2M 15P - 100P32768 7.5P5.2.3 内部RC振荡器客户还可以在掩膜时选用内部的RC振荡器,这个振荡器在5V下的振荡频率为2.3MHz,随工作温度和工作电压的不同,这个频率会有一定漂移。
5.3 复位CM2004内置上电复位电路(注意不是低电压复位),另外芯片上还设计有一个外部复位端/MCLR,该引脚内部上拉。
芯片复位可由以下原因引发:1,芯片上电;2 看门狗超时溢出;3,/MCLR被拉低。
当芯片复位期间,所有I/O口都被置成高阻态,PC值被置为全“1”,OPTION被置为全‘1’,WDT和预分频器被清零,F3电路。
当芯片上电或/MCLR 变低结束后,复位状态将持续15ms,才进入运行。
5.4 输入输出端口CM2004有PORTA(4位)和PORTB(8位)两个通用输入输出端口。
除此之外,TOCKI 和/MCLR 可以在掩膜时通过修改OPTION 变成PORTC。
这个PORTC 端口共两位,TOCKI 对应第0位,/MCLR 对应第1位。
PORTC 的使用方法与PIC16C57的PORTC 完全一样。
所有的输入输出端口都可以在掩膜时内置上拉或下拉电阻。
PORTA 和PORTB 上拉电阻可选10K 或60K 而下拉电阻只可选60K,PORTC 只能选60K 的上拉或下拉电阻。
6.电路特性参数PIC16C56(民用级)与CM2004 DC 特性比较表特性 符号对象典型值或范围单位测试状态(注1)PIC16C563.0~6.25 工作电压 VDD CM20042.0~6.5 VPIC16C561.8(最大3.3)CM2004(外部时钟) 0.8 CM2004(晶振) 0.9 CM2004(RC 振荡) 0.8mA频率:4MHz 电压:5.5V 看门狗:打开 PIC16C56 15(最大32) 工作电流 (注2、3)IDD CM2004(晶振)10uA频率:32KHz 电压:3.0V 看门狗:关闭 PIC16C564.0(最大12)CM2004 7uA 电压:3.0V 看门狗:打开 PIC16C56 0.6(最大9) 低功耗电流 (注2)IPD CM20040.4uA 电压:3.0V 看门狗:关闭 PIC16C56VSS~0.2VDD I/O口输入低电平 VIL CM2004 VSS~0.3VDD VPIC16C560.45VDD~VDD I/O口输入高电平 VIH CM2004 0.4VDD~VDD (注4) VPIC16C56IOL=8.7mA VDD=4.5V I/O 口输出低电平VOL CM2004最大0.6VIOL=13.3mA VDD=4.5V PIC16C56IOH=-5.4mA VDD=4.5V I/O 口输出高电平VOH CM2004最小VDD-0.7VIOH=-4.0mA VDD=4.5V 注:1.测试温度为室温25°C。
2.工作电流主要受工作电压和频率的影响,其他因素诸如总线负载、振荡类型、程序以及温度都对工作电流大小或多或少有影响,所以测试时做一定条件的限定:a) 所有正常工作模式下的工作电流测试条件为:I/O:设置成输入并接地;T0CKI:接VDD;/MCLR:接VDD;看门狗具体指定打开或关闭。
b)对于低功耗电流,测试条件同上,但芯片在SLEEP 状态。
3.RC 振荡模式时,外部上的电流不计入表中工作电流值,Rext 上电流可用这个公式计算:I =VDD/2Rext。
4.可以通过MASK形式将I/O口改为施密特结构,此时输入高电平改为0.53VDD~VDD。
PIC16C56(民用级)与CM2004 其他特性比较表特性对象典型值或范围单位测试状态工作频率PIC16C56 频率:DC ~ 20MHzCM2004 频率:DC ~ 20MHz(注1)PIC16C5618看门狗复位周期ms(未分频)CM200415抗静电能力VPIC16C56未知CM20041500工作温度°CPIC16C560 ~ 70CM2004-40 ~ 85抗干扰能力PIC16C56 强CM2004 较强I/O 口上、下拉电PIC16C56 无阻CM2004 可选I/O 口输入类型PIC16C56 CMOSCM2004 CMOS或施密特PIC16C56 12最大I/O数CM2004 14注:1.CM2004 如果使用外部时钟或晶振,则可以很稳定地工作在高达20MHz 频率下;若使用RC 振荡,调节外部振荡电阻的大小,频率也能达到20MHz,但此时外部上拉电阻值很小,振荡可能不稳,建议此电阻不小于3K,即相对应的可靠的RC 振荡最高频率为15MHz(该数据在5V下测得)。