《现代雷达技术》word版
现代雷达理论与技术 教学大纲

第一章理解麦克斯韦方程组包含电流连续性定理的物理意义和推导过程;电磁场边界条件推导过程;波动方程的推导;坡印廷定理及物理意义;能够分析电磁波在不同媒质(损耗、色散、平面分层)的传播特性;理解电磁波的极化;理解电磁波散射的特点(理解电磁波与目标相互作用过程),掌握雷达截面(RCS)和雷达散射系数,理解雷达方程;掌握简单目标的极化散射矩阵的推导方法;理解单站散射和多站散射的基本概念以及在一定条件下双站散射可等效于单站散射的基本原理;了解电磁波散射问题分析计算的常用方法的基本分类和基本步骤。
了解雷达的主要分类,掌握合成孔径雷达获得方位向高分辨率的原理及推导;理解SAR图像的斑点噪声的本质;合成孔径雷达与逆合成孔径雷达的相同点和不同点;理解跟踪雷达(单脉冲测角)、超视距雷达、海洋观测雷达(雷达散射计和雷达高度计)的工作原理,能够解释雷达测量得到的后向散射功率与海面风速变化的关系。
第二章了解雷达系统的基本组成。
了解天线的基本理论(基本分析方法)和分类。
掌握半波振子和全波振子天线电流分布,会分析无限大导电平面上的电流源的镜像电流的电流方向;理解矩量法(Method of Moments)分析求解线天线电流分布的基本过程;掌握口径场方法分析天线的辐射特性;了解天线的基本分类及其特点;了解反射面天线的工作原理;能够推导天线的远场条件;能够推导天线阵的方向图,掌握阵列天线不出现栅瓣的条件;掌握天线阵加权的基本方法;掌握相控阵天线的工作原理。
第三章了解常用的雷达信号模型及特点;了解相干雷达的本质;掌握复信号的四种表达方式;理解I/Q调制和解调的作用。
掌握Chirp信号的匹配滤波和Stretch处理方法以及相位编码信号的压缩方法;掌握调频步进脉冲信号的优势和自相关函数;能够判断不同入射角地距分辨率的大小。
了解交轨干涉和顺轨干涉的用途、基本原理以及基本信号处理步骤。
理解并掌握Doppler频率(移)的推导过程;理解广义合成孔径基本原理;理解阵列雷达空时自适应处理(STAP)的基本概念;了解时频分析方法在雷达信号处理中的应用;掌握通过对信号加窗来降低脉冲压缩旁瓣的常用方法。
2010年《现代雷达》总目次

口总体 工 程
杨 雯 , 等 1 ( 7) 刘 伟, 等 l (0 1) 张治 西 , 等 1 ( 5 1) 龚 云, 等 1 ( 7 1) 马明权 , 等 1 ( 2 2) 杨 光 , 等 1 (6 2) 贾兴江 , 等 2 ( 7) 王莲 荣 , 2 ( 2 等 1) 机载雷达组网导航定位误差仿真分析 …… …… …… …… …… ……… …… …… ……… …… …… 彭金 龙 , 2 ( 6 等 1) 双基 S R压制式干扰功率特性分析 ……… …… …… ……… …… …… ……… …… ……… …… … 刘 防, A 等 2 ( 2 2) 基于最小平均能耗的天基雷达波形设计 … …… …… ……… …… …… ……… …… …… ……… … 何松 华 , 等 2 ( 7 2) 国外电磁篱笆建设要素分析… …… ……… …… …… ……… …… …… …… ……… …… ……… … 郭 伟 , 等 2 ( 1 3) 种扩展多站无源探测定位范围的新方法 ……… …… …… ……… …… …… ……… …… …… … 万 方 , 等 3 ( 5) 航管二次雷达测量精度分析及改善方法 … ……… …… …… ……… … ……… …… ……… …… … 吕江涛 , 等 3 ( 0 1) 种新的适用于高空雷达传播的混合模式 ……… …… …… ……… …… ……… …… …… ……… 孙 方 , 等 3 ( 3 1) 风廓线雷达天线性能的限制条件分析 …… ……… …… …… ……… …… ……… …… …… ……… 李 忱 , 等 3 ( 8 1) 基于信号处理优化设计的雷达性能改进 … ……… …… …… ……… …… ……… …… …… ……… 杨建 民 , 等 3 ( 1 2) 多频连续波雷达隔圈解距离模糊方法研究 … …… ……… …… …… …… ……… …… …… ……… 丁顺 宝 , 等 3 (4 2) 针对双基地雷达的分布式干扰研究 …… …… …… ……… …… …… …… ……… …… ……… …… 孙云辉 , 等 4 ( 5) 炮位雷达智能应答器的设计与实现 …… … ……… …… …… ……… …… ……… …… …… ……… 焦 丰 , 等 4 ( 1 1) 三坐标雷达实际垂直探测威力模型及算法研究 …… ……… …… ……… …… …… ……… …… …… 潘新龙 , 4 (6 等 1) 基于 Goe l 地图的雷达探测范围计算方法研究 …… ……… … ………… … ……… …… ……… …… 胡绘斌 , 4 ( 1 b 等 2) 种基 于并 串结合方式的波控系统设计 … … … … … … … … … … … … … … … … … … … … … … … … … 孙 国 平 4 ( 5 2) B PK系统抗脉冲干扰性能研究 ……… …… …… ……… …… ……… …… …… ……… …… …… 冯 熳 , Bs 等 4 (8 2) 球载捷联惯性/ P 组合导航系统及动态对准技术 … …… …… ……… …… …… ……… …… …… 点测量研究 … ……… …… ……… …… …… ……… …… …… ……… … 陈士连 , 等 5 (8) c+ 合建站中脉冲雷达新工作模式精度分析 … …… …… …… ……… …… …… ……… ……… … 宋海军 , 5 ( 1 C 等 1) 基于高层体系结构的防空系统仿真研究 …… …… ……… …… ……… …… …… ……… …… …… 马艳琴 , 5 (6 等 1) 对空监视情报雷达宽带技术应用研究 … ……… …… ……… …… …… …… ……… …… ……… … 曹 生 , 5 ( 9 等 1) 干涉IA S R三维成像试验研究 …… …… ……… …… …… ……… …… …… …… ……… …… …… 黎 海林 , 5 ( 2 等 2) 基于一维距离像的雷达目标识别研究进展 …… …… …… ……… …… …… …… ……… ……… … 余 贵水 , 6 ( 等 5) 基于合建站的脉冲雷达功能拓展研究 … ……… …… ……… …… …… …… ……… …… ……… … 王 晓明 , 等 6 ( 1 1) 浮空器雷达载荷发展浅析 … … … … … … … … … … … … … … … … … … … … … … … … … … … … … … 罗 敏 6 ( 4 1) 高海拔地区环境特性对系留气球系统的影响 …… …… ……… …… …… ……… …… …… ……… 高精度局域定向定位技术及其精度分析 …… ……… …… …… …… …… ……… …… …… ……… RS C 动态测量雷达幅度相位校准技术 … …… ……… …… …… …… …… ……… …… …… ……… 机载 MM I O雷达地杂波功率谱仿真分析 …… ……… …… …… ……… …… …… ……… …… …… 雷达装备远程技术支援保障综合集成研讨厅设计 …… …… …… ……… …… …… ……… …… …… 辐射定标对 S R 骗干扰 的影 响及改进方法 … … … … … … … … … … … … … … … … … … … … … A 欺 三机无源定位二维布阵优化研究 … ……… …… …… ……… …… …… …… ……… …… ……… … sJ o 干扰下雷达网检测性能分析 … ……… …… …… …… …… ……… …… …… ……… …… ……
现代雷达技术ppt课件

系统容许的虚警率水平的高低取决于系统处理能力(与硬件的存储 容量和计算速度、目标检测方法、目标跟踪方法等有关)。
虚警可通过目标检测处理(积累检测消除伪目标)和目标跟踪处理 (消除伪航迹)进一步消除。
1e 2u
x plnu 2 22
令uL= lnu ,得正态分布uL的概率密度:
puL 21exp uL2 2 2
归一化,令 v uL ,v的概率密度函数为:
pv
1 v2 2exp 2
v的概率密度函数与u的分布参量无关,对v设置门限可实现恒 虚警率。
Pf uUT pudu 虚警概率为门限电平的函数。
UT
按概率论的中心极限定理,由大量作用比较均匀的随机分量合成的 随机量服从正态分布,正态分布的包络(检波后的视频信号)服从 瑞利(Rayleigh)分布:
puu2 exp2u22
2为方差。
噪声在脉冲——脉冲间统计独立,非相关。
uL的方差为: DuLEuL 2 EuL2 62 12
归一化,v
uL
EuL DuL
,v
的概率密度函数为:
pv
ev 6eC
6exp e evC6
式中,欧拉常数C≈0.557,p(v)与杂波参量(、)无关,亦即与 杂波的均值和方差无关,因而可实现恒虚警率处理。
由虚警率决定的门限T进行比较,使发现概率最大。
■实用检测器(积累器) 滑窗
+
+
-
……
比较器
T
Si Si 1xixin Si为第i个脉冲前n个脉冲序贯求和。
《现代雷达技术》课件
模拟雷达阶段主要集中在20世纪50年代 ,该阶段的雷达系统采用模拟电路,功 能较为简单。
数字化雷达阶段开始于20世纪70年代, 该阶段的雷达系统开始采用数字信号处 理技术,提高了雷达的性能和精度。
接收机
接收机是雷达系统的另一重要 组成部分,负责接收和处理回
波信号。
接收机的性能指标包括灵敏度 、动态范围、抗干扰能力等, 直接影响雷达的检测精度和可
靠性。
常见的接收机类型包括超外差 式和直接变频式等,根据雷达 系统的需求选择合适的接收机 类型。
接收机的设计需考虑噪声抑制 、信号处理和稳定性等问题, 以确保接收机能够提供高质量 的回波信号。
《现代雷达技术》ppt课件
contents
目录
• 雷达技术概述 • 现代雷达技术发展历程 • 现代雷达系统组成与工作原理 • 现代雷达的主要技术特点 • 现代雷达技术的应用实例 • 现代雷达技术的挑战与未来发展
01
雷达技术概述
雷达的定义与原理
雷达定义
雷达波传播方式
雷达是一种利用无线电波探测目标的 电子设备。
信号处理与数据处理
数据处理负责对目标数据进行进一步的分析和 处理,包括目标检测、跟踪、识别和多目标处
理等。
随着信号处理和数据处理技术的发展,现代雷达系统 不断引入新的算法和技术,以提高雷达的性能和功能
。
信号处理是雷达系统的关键环节,负责对回波 信号进行滤波、放大、变频和检测等处理,提 取出目标信息。
标速度。
合成孔径雷达
利用高速运动平台,通过信号 处理技术形成大孔径天线,提
高分辨率。
现代雷达信号处理的技术发展趋势
现代雷达信号处理的技术发展趋势【摘要】雷达技术作为现代军事和民用领域的重要组成部分,其信号处理技术的发展趋势备受关注。
本文从智能化处理技术、高性能计算平台、多传感器融合技术、自适应波束成形技术以及机器学习与人工智能技术等方面进行了深入探讨。
未来的发展趋势将更加注重技术的智能化和自适应性,同时借助高性能计算平台提升信号处理效率。
多传感器融合技术和自适应波束成形技术的应用将进一步提高雷达系统的性能和精度。
机器学习与人工智能技术的应用将为雷达信号处理带来更多可能性。
现代雷达信号处理技术的发展将对军事和民用领域产生深远影响,为未来应用领域带来更广阔的前景。
【关键词】雷达信号处理、技术发展、趋势、智能化处理、高性能计算、多传感器融合、自适应波束成形、机器学习、人工智能、未来发展趋势、应用前景、军事、民用领域、影响。
1. 引言1.1 现代雷达信号处理的技术发展趋势随着科技的不断发展和进步,现代雷达信号处理技术也在不断地创新和升级。
在过去的几十年里,雷达信号处理技术已经取得了长足的进步,从单一的目标检测到实现多目标跟踪、目标识别和抗干扰能力的提升,使得雷达系统在军事和民用领域中扮演着越来越重要的角色。
智能化处理技术的发展是现代雷达信号处理技术的一个重要趋势。
通过引入智能算法和机器学习技术,使得雷达系统能够更加自主地进行信号处理和目标识别,提高了系统的自适应性和智能化水平。
高性能计算平台的应用也是现代雷达信号处理技术发展的重要方向,通过利用并行计算和高性能计算技术,加快了雷达信号处理的速度和效率,提高了系统的处理性能和实时性。
多传感器融合技术的发展也为现代雷达信号处理技术带来了新的发展机遇。
通过整合不同传感器的信息,可以提高系统的目标检测和跟踪性能,同时降低系统的误报率,增强系统的抗干扰能力。
自适应波束成形技术的应用也是现代雷达信号处理技术的重要发展方向,通过调整波束形状和指向,使得雷达系统能够更加有效地对目标进行定位和跟踪。
现代雷达技术
现代雷达技术6个基本问题1,雷达的任务和特点是什么?答:传统雷达的任务仅要求对目标距离、方位、高度进行测量,而高性能雷达则还需要测量目标的速度、加速度、目标回波特性起伏、极化特性、尺寸形状,甚至要求对目标进行微波成像;需要增大雷达作用距离,改善雷达分辨率,提高雷达数据率;并且要求雷达能对目标进行跟踪、识别和分类。
现代雷达系统采用最先进的微电子技术、计算机技术、现代信号处理技术等,使系统具有体积小,质量轻,功能丰富,具有数字化、信号多样化,调制方式复杂化、频带宽带化、网络化、智能化等特点,较传统雷达有着更远的探测距离,更好的分辨率、数据率、资源利用率,更强的自适应能力,更高的抗干扰能力和可靠性。
2,雷达的基本组成有哪些?答:(一)半波振子雷达想要探测目标,就要有无线电波。
雷达中能在空间激起无线电波的工具就是振子,其实就是一根金属棒。
电子在金属棒中来回反弹的过程叫做电振荡,如果反弹的过程中没有任何阻力的话,这种反弹会一直持续下去。
金属越长,电子流来回振荡一周所需要的时间也就越长,振荡频率也就越低了。
在振荡一周的时间内,电子流走过的距离就是波长。
显然,电子流在这段时间内,走过的距离恰好是金属棒长度的两倍。
所以,这种金属棒常称为半波振子。
半波振子上电子流的很高频率的电振荡,会在空间激发出频率相同的无线电波,它以光速飞快地离开振子向四面八方飞逝而去;半波振子是雷达向空间发射无线电波的器件。
因为半波振子能向空间发射无线电波,所以有时把它称为辐射器。
(二)发射机半波振子中电子流的来回振荡会遇到阻力,要是不给它供给能量,使其克服各种阻力,这种振荡很快就会停止下来。
所以雷达中有一部机器,它能驱使半波振子上电子流的振荡按照我们的需要,强有力进行,这种机器叫雷达发射机,是半波振子的能源。
雷达发射机供给半波振子以高频率电振荡的能量,半波振子在空间激起无线电波。
一旦关断雷达发射机,半波振子也就停止向空间发射无线电波了。
所以控制发射机通断,就可以控制向空间发射无线电波。
《现代雷达》投稿须知
任何方式的通知 , 稿件视为未通过审稿 , 作者可 自 行处理。投稿作者也可以致电编辑部查询。
《 现代 雷达》 编辑部
8 — 6
一
1 )要求论文语言流畅, 逻辑关系明确。在不影响基本思想表述完整性的前提下 , 请尽量精Байду номын сангаас语句 、 精简图表 和公式 、 化推导 和证 明过 程 , 简 将篇 幅控 制在 6千字 以 内( 包括 图表所 占篇 幅 ) 。
.
2 请写明题 目的英译文、 ) 作者姓名的汉语拼音以及作者单位的英译文 , 目不要超过 1 题 8个字 , 同时附 3~ 8 个中英文关键词和 20~ 0 字的中文摘要及约 20 0 40 5 个实词的英文摘要 。摘要采用第三人称写法 , 应是一篇独立 的短文, 包含与论文同等量的主要信息 , 一般应包括 目的、 方法 、 结果 、 结论 四要素。中文关键词全部为中文, 英文
缩写 须有相 应 的中文 解释 。
3 )文中和公式中字符( 数字 、 希腊文 、 英文 、 罗马字) 的大小写 、 上下标及上下标字母含义须明晰 , 表示矢量、 向量及矩阵的字母请用黑斜体。图表中文字、 变量、 单位 、 数字要清晰。文中图应为黑白图 , 有图说并注明物理量 及其单位 ; 公式要有相应的顺序号。参考文献应信息齐全 , 期刊 : 如“ 作者. 题名. 期刊名, , 期) 起止页码 ” 年 卷( : “ 书籍 : 作者. 书名. 出版地 : 出版单位 , 出版年” 且按先后顺序在正文 中相应位置标 出。中文参考文献须附有相 , 应的英译文。正文中以“ 引言” 为一级标题 , 序号为 0 。 4 )投稿时, 请附言说 明稿件涉及 的科研项 目概况、 有关的背景资料和成果 的主要创新点。若 为基金资助项 目或部省级重大科研攻关项 目, 请提供项 目编号 , 本刊将酌情优先录用和发表 。 5 )请对稿件署名( 即成果的主要责任人和成果所属单位) 及顺序进行检查 , 以避免发生知识产权纠纷。本 刊友情提醒 : 作者署名中的单位一般指成果所属单位 , 而不是作者投稿时的就学单位或工作单位。 6 )凡学生投稿 , 请务必提供导师信息。对本刊拟采用 的稿件 , 请导师参考本刊审稿意见对稿件涉及的学术 道德和学术内容予以严格把关 , 并由导师向编辑部致函确认。 7 )编辑部收稿后 , 一般在 2 个月内提交审理意见。在稿件受理期间, 不得另投他刊。请务必在收到编辑部 的修改要求后 1 个月内提供修改稿 , 若有必要延迟, 请及时向编辑说明。 8 )编辑部有权对采用的稿件做必要的删改。稿件一经发表, 即致稿酬并赠刊物 2 册。
现代雷达技术课件
…… 探测周期
123
1 2 3
…… …… …… ……
m
……
t(R) n-1n
利用RAM实现旳滑窗检测器
原始 视频
V(t)
v0
量化
锁存器1
距离 时钟
地址计数器
RAM 1
RAM 2 ......
锁存器2 锁存器3
RAM m
锁存器m
Σ
门限 鉴定
输出
k
门限k旳选择:
kopt 1.5 m
(适用范围:1010
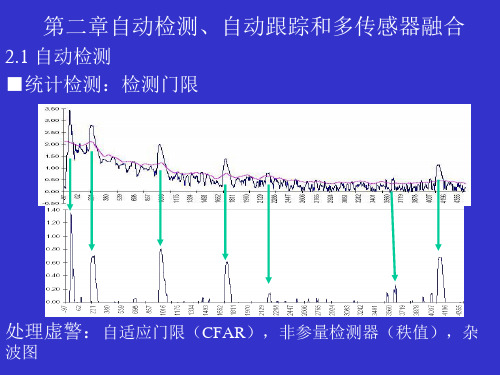
第二章自动检测、自动跟踪和多传感器融合
2.1 自动检测 ■统计检测:检测门限
处理虚警:自适应门限(CFAR),非参量检测器(秩值),杂
波图
■最佳检测器
统计检测:二元假设,有目的H1,无目的H0
似然比检测
Lx1 ,x2 ,,xn
p p
x1 , x2 ,, xn x1 , x2 ,, xn
H1 H0
t
cos2f
it
有付氏变换:
rect t sin c f
cos2fit
1 f
2
fi f
fi
Ui f
2
sin c f
fi
2
sin c f
fi
假设杂波回波是大量随机分布散射点旳回波旳集合,与白噪声类 似,c(t) 看作在时间上密集分布旳 (t) 函数旳总和,其付氏变换 C(f)可以为是均匀分布旳,C2(f)可用功率密度C0替代,所以有:
移位寄存器
S1 ……
SN
……
移位寄存器
S0
SN+1 ……
S2N
……
求均值
检测 输出 门限 判决
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现代雷达技术6个基本问题1,雷达的任务和特点是什么?答:传统雷达的任务仅要求对目标距离、方位、高度进行测量,而高性能雷达则还需要测量目标的速度、加速度、目标回波特性起伏、极化特性、尺寸形状,甚至要求对目标进行微波成像;需要增大雷达作用距离,改善雷达分辨率,提高雷达数据率;并且要求雷达能对目标进行跟踪、识别和分类。
现代雷达系统采用最先进的微电子技术、计算机技术、现代信号处理技术等,使系统具有体积小,质量轻,功能丰富,具有数字化、信号多样化,调制方式复杂化、频带宽带化、网络化、智能化等特点,较传统雷达有着更远的探测距离,更好的分辨率、数据率、资源利用率,更强的自适应能力,更高的抗干扰能力和可靠性。
2,雷达的基本组成有哪些?答:(一)半波振子雷达想要探测目标,就要有无线电波。
雷达中能在空间激起无线电波的工具就是振子,其实就是一根金属棒。
电子在金属棒中来回反弹的过程叫做电振荡,如果反弹的过程中没有任何阻力的话,这种反弹会一直持续下去。
金属越长,电子流来回振荡一周所需要的时间也就越长,振荡频率也就越低了。
在振荡一周的时间内,电子流走过的距离就是波长。
显然,电子流在这段时间内,走过的距离恰好是金属棒长度的两倍。
所以,这种金属棒常称为半波振子。
半波振子上电子流的很高频率的电振荡,会在空间激发出频率相同的无线电波,它以光速飞快地离开振子向四面八方飞逝而去;半波振子是雷达向空间发射无线电波的器件。
因为半波振子能向空间发射无线电波,所以有时把它称为辐射器。
(二)发射机半波振子中电子流的来回振荡会遇到阻力,要是不给它供给能量,使其克服各种阻力,这种振荡很快就会停止下来。
所以雷达中有一部机器,它能驱使半波振子上电子流的振荡按照我们的需要,强有力进行,这种机器叫雷达发射机,是半波振子的能源。
雷达发射机供给半波振子以高频率电振荡的能量,半波振子在空间激起无线电波。
一旦关断雷达发射机,半波振子也就停止向空间发射无线电波了。
所以控制发射机通断,就可以控制向空间发射无线电波。
(三)雷达天线有了发射机和半波振子,就可以向空间发射无线电波了。
但这样发射出去的无线电波是不能用来搜索和探测目标的。
因为它向空间所有的方向都发射出无线电波。
雷达使无线电波定向发射的方法就是,不让半波振子直接向空间发射无线电波,而是让它把无线电波先发射到一个象大锅一样的反射器上,从反射器反射出来的无线电波就只朝一个方向发射了。
这种象大锅一样的反射器,叫做抛物面反射器。
反射器的大小,与无线电波的波长很有关系。
波长短,反射器就可以做得小一点;波长长,反射器就要做得大些。
在相同波长下,反射器越大,对电波的集聚作用就越好。
把半波振子(辐射器)和大锅样的反射器合在一起,看作一个整体,叫做雷达天线。
这种样子的雷达天线又特地叫做抛物面天线。
对米波雷达来说,把几十个甚至几百个半波振子按照一定的规律排起队来,也可以实现定向发射。
而且半波振子数目越多,定向性就越好。
在相同定向发射性能的条件下,雷达工作波长愈短,雷达天线的尺寸也就可以做的小一些。
但是不能说雷达的工作波长愈短愈好。
波长太短的无线电波在大气中传播时,会受到很大的损耗。
所以雷达工作的波长既不能太长也不能太短,它通常工作在超短波或微波波段。
(四)雷达接收机从目标发射回来的无线电波,在雷达天线还没有来得及从一个方位转到另一个方位以前,就已经返回到它上面来了。
为了要从这些反射回来的无线电波身上了解到目标的情报(它的方位、高度、距离等),就必须要有一个象蝙蝠的耳朵那样的东西。
在雷达上,这一部分叫做雷达接收机。
为使雷达的探测距离尽量远,雷达发射机的功率是很大的。
但是从远距离目标上反射回来的无线电波的功率,却是极其微小的。
远距离目标反射回来的无线电波信号这么微弱,一般都要把它放大几百万倍以上,才能在雷达显示器上观察到。
这个放大几百万倍的任务就要由雷达接收机来完成。
雷达接收机与普通的超外差式无线电收音机在原理上是完全一样的。
但是它接收的是从目标反射回来的超短波或微波。
由于雷达的工作频率太高,要把这么高频率的信号直接放大几百万倍,是不大容易的。
因此,在信号进入接收机后,首先要把它的频率从较高的超短波或微波波段降低到一个较低的中频频率上,这就叫变频。
把这个频率降低了的信号,再经过许多级由晶体管或电子管构成的放大器一次次的放大,这样就能够比较容易地达到放大几百万倍地目的。
这种经变频后再放大地接收机就叫做超外差式接收机。
(五)雷达显示器它是用于自动实时显示雷达信息的终端设备,是人机联系的一个接口。
雷达显示器通常以操纵员易于理解和便于操纵的雷达图像的形式表示雷达回波所包含的信息。
传统的雷达图像是接收机直接输出的原始雷达视频或者经过信号处理的雷达视频图像。
这称为一次显示。
经计算机处理的雷达数据或综合视频显示的雷达图像,称为二次显示。
雷达图像可插入各种标志信号,如距离标志、角度标志和选通波门等,甚至可插入或投影叠加地图背景,作为辅助观测手段。
为了录取目标信号或选择数据,雷达图像上可插入数字式数据、标记或符号。
雷达显示器还能综合显示其他雷达站或信息源来的情报并加注其他状态和指挥命令等,作为指挥控制显示。
与计算机相联系的显示控制台常采用键盘、光笔和跟踪球,甚至话音输入装置等,以这些来作为人机对话的输入装置。
3,雷达工作在什么频段?答:雷达波段(radar frequency band) 雷达发射电波的频率范围。
其度量单位是赫兹(Hz)或周/秒(C/S)。
大多数雷达工作在超短波及微波波段,其频率范围在30~300000MHz,相应波长为10m至1mm,包括甚高频(VHF)、特高频(UHF)、超高频(SHF)、极高频(EHF)4个波段。
第二次世界大战期间,为了保密,用大写英文字母表示雷达波段。
将不同频段的电磁波的传播方式和特点各不相同,所以它们的用途也就不同。
在无线电频率分配上有一点需要特别注意的,就是干扰问题。
因为电磁波是按照其频段的特点传播的,此外再无什么规律来约束它。
因此,如果两个电台用相同的频率(F)或极其相近的频率工作于同一地区(S)、同一时段(T),就必然会造成干扰。
因为现代无线电频率可供使用的范围是有限的,不能无秩序地随意占用,而需要仔细地计划加以利用。
4,雷达发射机的任务和组成分别是什么?答:雷达是利用物体反射电磁波的特性来发现目标并确定目标的距离、方位、高度和速度等参数的。
因此, 雷达工作时要求发射一种特定的大功率无线电信号。
发射机在雷达中就是起这一作用,它为雷达提供一个载波受到调制的大功率射频信号, 经馈线和收发开关由天线辐射出去。
发射机按工作方式分单级振荡式发射机和主振放大式发射机。
单级振荡式发射机只由一级大功率振荡器产生发射信号,其输出功率取决于振荡管的功率容量。
性能特点:1. 简单;经济;轻便2. 质量技术指标低3. 产生简单发射波形。
主振放大式发射机先由高稳固体微波源产生,再经级联的放大电路,形成满足功率要求的发射信号,其输出功率取决于输出级发射管的功率容量。
性能特点:1. 复杂;昂贵;笨重2. 质量技术指标高3. 产生各种复杂发射波形。
单级振荡式发射机和主振放大式发射机的组成框图如下所示单级振荡式发射机主振放大式发射机5, 雷达接收机的任务和组成分别是什么?答:雷达接收机的任务:不失真的放大所需的微弱信号,抑制不需要的其他信号(噪声、干扰等)。
超外差式雷达接收机的优点是灵敏度高、增益高、选择性好、适应性广。
其简化方框图如下。
它的主要组成部分:1.高频部分:(1)T/R 及接收机保护器:发射机工作时,使接收机输入端短路,并对大信号限幅保护。
(2)低噪声高频放大器:提高灵敏度,降低接收机噪声系数,热噪声增益。
(3)Mixer,LD,AFC:保证本振频率与发射频率差频为中频,实现变频。
2.中频部分及AGC:(1)匹配滤波:( / ) max o S N(2)AGC:auto gain control.3.视频部分:(1)检波器:包络检波,同步(频)检波(正交两路),相位检波。
(2)视频放大器:线形放大,对数放大,动态范围。
6,影响雷达测量精度的因素有哪些?答:雷达所测量的目标参数通常包括目标距离(回波时延)、距离变化率(多普勒频移)、方位角和俯仰角(回波到达角)等。
现代雷达还能测量目标尺寸、形状和其他参数。
测量精度的根本限制因素是噪声。
仔细说来,主要有六个影响因素:(1)同步误差。
由于发射机电路及波导系统对发射脉冲的延时作用,造成扫描起始时刻超前于天线口辐射的时刻,势必造成显示屏上显示的目标距离将比天线口到目标的实际距离大,形成一固定的测距误差,此即同步误差。
(2)因固定距标和活动距标的不精确引起的测距误差。
固定距标和活动距标本身均有误差,用它们测量目标的距离必然也会有误差。
固定距标通常在雷达厂内已校准至误差为所用量程的0.25%以内。
活动距标的误差约为所用量程距离的1%~1.5%,使用中,应定期将它与固定距标进行对比。
(3)扫描锯齿波的非线性。
理想的扫描锯齿波应是直线上升的,但实际上往往是非线性的,这样,即使固定距标在时间上是等间隔的,但在荧光屏上出现的固定距标圈之间的间隔是不等的。
此时,利用固定距标测量目标距离,在内插时将会产生较大误差。
(4)因光点重合不准导致的误差。
因为雷达荧光屏上的光点是有一定尺寸的,若光点直径为d,则它会使回波尺寸在各个方向均增大d/2,所以回波的边缘并不恰好代表物标的边缘。
测距时用距标圈与回波前缘重合会由于重合不准而导致测距误差。
(5)雷达天线高度引起的误差。
雷达测定的物标距离是天线至物标的距离,而不是船舷至物标的水平距离。
天线高度越高,影响越大;物标距离越远,影响越小。
(6)脉冲宽度造成回波图像外侧扩大引起的测距误差。
由于脉冲宽度会造成雷达回波图像外侧扩大C·τ/2这是雷达回波图像的固有失真,倘若我们选择回波外侧边缘测距,必然会引起C· τ /2的测距误差。