自制无刷电机电调
不服不行,大牛DIY无刷电机控制器:画板、打样、焊接、调试...

不服不行,大牛DIY无刷电机控制器:画板、打样、焊接、调试...很早之前就想做一款无刷电机控制器,忙于工作一直没有弄。
最近有点时间画板,打样,焊接,调试,总算顺利的转起来。
期间也遇到很多问题,上网查资料,自己量波形前前后后搞了差不多近一个月,(中间又出差一周)总算搞的差不多了,特意写个总结。
板子外观100*60mm 中等大小。
DC 12V输入,设计最大电流10A.(实际没试过那么大的电机,手头的电机也就5 6A的样子)硬件上可以切换有感(HALL)和无感(EMF)两种模式,外部滑动变阻器调速预留有 PWM输入、刹车、正反转、USB和uart等接口。
先来说下原理无刷电机其实就是直流电机,和传统的DC电机是一样的,只是把有刷的电滑环变成了电子换向器。
因为少了电滑环的摩擦所以寿命静音方面有了很大的提升,转速也更高。
当然难点就在如何获取当前转子的位置好换相,所以又分为两种有感和无感。
有感就是在电机端盖的部位加装霍尔传感器分别相隔30度或60度。
无感就是靠检测悬浮相的感应电动势过零点(后面在细讲)。
当然各有各的优缺点,有感在低速方面好,可以频繁启停换相。
无感的结构简单成本低,航模上应用居多。
先说有感,电源首先被分成了3个绕组U V W这个交流电还是有区别的。
它只是3个h桥按一定的顺序导通模拟出来的,本质还是直流电。
电机靠hall位置按一定顺序换相,转速与电压电流有关。
这一点切记,不是换的越快转的越快。
(位置决定换相时刻,电压决定转速)一般调速就是调电压,6步pwm方式是目前常用的。
当然后续还有foc等更好算法。
硬件部分网上基本都是成熟的方案。
三相H桥,H桥一般有上臂mos和下臂mos组成,如果只是简单的做演示上臂选pmos下臂选nmos控制电路简单直接用单片机的io就可以驱动。
但是pmos低内阻的价格高。
功率上面很难做大。
这也就是为什么基本所有的商业控制器全是nmos的原因。
但是上臂用nmos存在一个问题vgs控制电压大与vcc 4v以上才能完全导通。
自制无刷电机教程

自制无刷电机教程
无刷电机是一种常见的电动机,其具有高效能、长寿命和低噪音等优点。
下面是一份制作自制无刷电机的简化教程,仅供参考。
材料:
1. 铁芯
2. 电线
3. 磁铁
4. D型磁环
5. 电动机座
6. 线圈
步骤:
1. 将铁芯剪成合适的长度,一端固定在电动机座上。
2. 将磁铁固定在铁芯的另一端。
确保磁铁与铁芯的位置正确,以获得较好的磁场。
3. 在铁芯上绕线圈,并将线圈的两端与电线连接。
确保线圈绕得整齐且牢固。
4. 将D型磁环安装在线圈的一端,使其与铁芯和磁铁之间形成空隙。
这将利用磁场的变化产生电流。
5. 将整个组件装配在电动机座上,确保一切连接牢固。
使用:
1. 连接电动机的电源。
2. 转动电动机,以产生磁场。
3. 通过电源发送电流至线圈,产生磁势力,驱动电动机旋转。
注意事项:
1. 在制作无刷电机时要小心,避免触电或其他不安全因素。
2. 当连接电源时,确保电压和电流适合电动机的要求,以避免损坏电动机或其他设备。
3. 在整个制作过程中,确保各个部件的紧固和连接牢固,以保证无刷电机的正常运行。
总结:
制作自制无刷电机需要一些基本的零件和工具,但并不复杂。
通过遵循上述步骤,您可以制作出一个简单的无刷电机,并用于一些小型的实验或业余科技项目。
但请注意,这仅仅是一个简化的教程,实际制作无刷电机的复杂度取决于所需的性能和用途。
如果您需要一个更高性能的无刷电机,建议购买专业的无刷电机产品。
自制电调原理说明
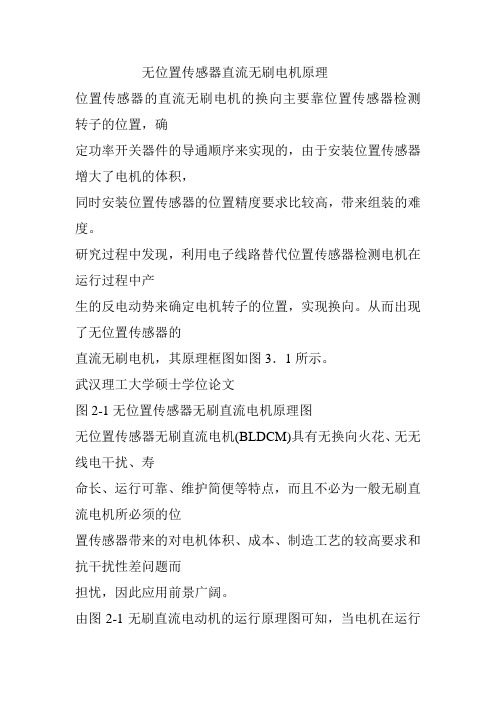
无位置传感器直流无刷电机原理位置传感器的直流无刷电机的换向主要靠位置传感器检测转子的位置,确定功率开关器件的导通顺序来实现的,由于安装位置传感器增大了电机的体积,同时安装位置传感器的位置精度要求比较高,带来组装的难度。
研究过程中发现,利用电子线路替代位置传感器检测电机在运行过程中产生的反电动势来确定电机转子的位置,实现换向。
从而出现了无位置传感器的直流无刷电机,其原理框图如图3.1所示。
武汉理工大学硕士学位论文图2-1无位置传感器无刷直流电机原理图无位置传感器无刷直流电机(BLDCM)具有无换向火花、无无线电干扰、寿命长、运行可靠、维护简便等特点,而且不必为一般无刷直流电机所必须的位置传感器带来的对电机体积、成本、制造工艺的较高要求和抗干扰性差问题而担忧,因此应用前景广阔。
由图2-1无刷直流电动机的运行原理图可知,当电机在运行过程中,总有一相绕组没有导通,此时可以在该相绕组的端口检测到该绕组产生反电动势,该反电动势60度的电角度是连续的,由于电机的规格,制造工艺的差别,导致相同电角度的反电动势值是不同,如要通过检测反电动势的数值来确定转子的位置难度极大。
因此必须找到该反电动势与转子位置的关系,才能确定转子的位置。
由于BLDCM的气隙磁场、反电势、以及电流波型是非正弦的,因此采用直交轴坐标变化不是很有效的分析方法。
通常直接利用电机本身的相变量来建立数学模型。
假设三相绕组完全对称,磁路不饱和,不计涡流和磁滞损耗,忽略齿槽相应,则三相绕组的电压平衡方程则可以表示为:根据电压方程得电机的等效电路图,如图2.2所示:2.3.2反电势法电机控制的原理无刷直流电机中,受定子绕组产生的合成磁场的作用,转子沿着一定的方向转动。
电机定子上放有电枢绕组,因此,转子一旦旋转,就会在空间形成导体切割磁力线的情况,根据电磁感应定律可知,导体切割磁力线会在导体中产生感应电热。
所以,在转子旋转的时候就会在定子绕组中产生感应电势,即运动电势,一般称为反电动势或反电势哺1。
简单无刷电调制作

电路图来啦!!!!!!!! 希望版主加精!
怎么没人给我加分呀,那么好的贴(自夸)大家给我加分呀!
本设计大胆,创新(呵呵,又自夸啦!).别人想都不敢想的,甚至还有人认为是天真的荒谬的想法,可我都做出了.(只要能够形成旋转磁场,三相也是可以转的.常用的交流异步电动机都是三相的,就因为有旋转磁场).
俺本来打算申请专利的,可是被这个论坛的好人感动了(特指跳跳虎同志,他送了我9粒MOS管,我没齿不忘.还有其它一些同志也有很多东西毫无保留地与大家分享了).所以,俺也要和大家分享成果,一起DIY才快乐.
电路原理图
画红圈的上拉电阻是后来加的.真菜,电压比较器都忘了加上拉电阻,还好后来发现了.MOS 管是SOT-23封装的(电流太小了),等跳跳虎赞助的MOS到后再换上大的.
PCB截图.
不懂上传文件,只能来两个截图.请问文件怎么上传?
高速旋转.
谁制作成功这个电调的别忘了回个短消息告诉我哦!制作完毕.整个过程花了我一天时间,效率有点低. 剧终!。
无感无刷直流电机之电调设计全攻略

无感无刷直流电机之电调设计全攻略本帖最后由 Bluesky 于 2015-4-3 13:36 编辑1. 无刷直流电机基础知识关于无刷直流电机的驱动的基本原理,很多教材和文档都已经讲得很清楚了,特别是坛上网友提供的:《无刷直流(BLDC)电机基础》(MicroChip公司,编号AN885)、《Brushless DC Motors Made Easy》(Freescale公司,编号PZ104)和Atmel公司的编号为:AVR194、AVR491、AV R 4 9 2的几篇文档,都写得很不错,深入浅出,很适合入门的初学者学习。
稍后我会给出它们的下载链接(见附录一)。
不过一上来就让读者自己去看文档,貌似不太厚道,那我这里还是辛苦一下,把各篇文档的精华部分抽取出来,重新组织一下,给大家一个关于无刷电机的比较概要的认识。
1.1 三个基本定则首先要搞清楚一件基本的事情:我们只是来搞电调的,而不是去设计电机的。
所以不要被一些无刷电机教材一上来那些林林总总的关于什么磁路、磁导率、气隙饱和、去磁曲线等基础知识给吓倒,那些东西是给设计电机的人看的,对我们这种仅仅以弄出一个电调为目标的人来讲,意义不大(不过你如果打算以此为职业的话,这些东西还是建议深入学习一下的)。
对于入门开发者来说,只需要记牢三个基本定则:左手定则,右手定则,右手螺旋定则。
1. 左手定则位于磁场中的载流导体,会受到力的作用,力的方向可按左手定则确定,如右图所示:伸开左手,使大拇指和其余四指垂直,把手心面向N极,四指顺着电流的方向,那么大拇指所指方向就是载流导体在磁场中的受力方向。
力的大小为:F= sin BILθ其中:B为磁感应强度(单位T),I为电流大小(单位A),为导体有效长度(单位m),为力的大小(单位N),θ为:和 B I的夹角。
2. 右手定则(安培定则一)在磁场中运动的导体因切割磁力线会感生出电动势,其示意见右图: E其大小为:E= vBLsin θ 其中:v为导体的运动速度(单位m/s),B为磁感应强度(单位T),L为导体长度(单位m),θ为:B和 L3. 右手螺旋定则(安培定则二)用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端就是通电螺旋管的N极。
DIY组装无人机电机+电调+电池+桨叶搭配技巧
一.怎么挑选电机,基本参数怎么看电机KV值:电机的转速(空载)=KV值X电压;例如KV1000的电机在10V电压下它的转速(空载)就是 10000转/分钟。
23.KV值?答:指加一伏电压,电机转速增加多少,KV2000即指电压在10伏的时候,电机每分钟空转转速是 20000转。
这个参数的意义是:能够帮助你判断这个马达的特性, KV高马达就暴力,内阻小,电流大,功率高,转速快或者说相同电压下爆发出来的功率高拥有很好的极限转速,但是受到电机自身的设计与材料限制,会有一个功率上限,一般说KV高的配小的高速桨,KV低的配大的低速桨,这个与开车有点类似,车感觉劲道最足的时候往往转速比较低。
21..电动机的品牌?答:常用的有,朗宇、新西达、亚拓、蝎子、浩马特、花牌、银燕;一般固定翼用朗宇较多,新西达(便宜)次之,直升机用亚拓、蝎子(太贵)次之22.电机的型号?答:电机型号,每个厂家都有自己的编号规则,主要有KV值,电机编码。
以朗宇电机,常规如无刷电机的型号 2212 2217 220822指电机直径12 17 08 指电机机身长度体积 2216 22122216动力就强于2212,具体数值可参考朗宇官方数据2212表示线圈外径22毫米,长度12毫米二.关于航模中电机+电池+桨的动力选择针对电机+电池+桨的推力综合如下:1.2208 36g/27.8×23mm,2212 48g/27.8x27mm,重量只相差8g;2.同一系列的电机,高KV+电池/桨的推力》低KV+电池/桨的推力3.不同系列电机,2208高KV+2S+桨1 ~=~ 2212低KV+3s+桨2;此时,因3S电池重于2S,导致2212方案重量大于2208方案;4.电池的重量2S与3S的相差极大(使用某型号做参考)1) 2S 20C 850mAh 45g2) 3s 20C 1300mAh 111g3) 3s 20C 2200mAh 175g4) 3s 20C 2800mAh 206g5) 2s 20C 1300mAh 85g (几乎是850mAh的一倍重量)6)2s 20C 1800mAh 128g5.飘飘机通常的机身空重在200g以内,单上翼300g以内(不含电机、电池,TDF6接收机5g左右、舵机9g*4=36g,电调20g以内)6.航模来说,推比和翼载很重要。
无刷电调
调速传动系统的各项重要指标:1)、调速范围:最高与最低转速相比。
2)、调速平滑性:相邻两档转速的差值越小越平滑。
3)、调速的工作特性:静态特性主要是调速后机械特性的硬度,对绝大多数负载,机械特性越硬,则负载变化时,速度变化越小,工作越稳定。
动态特性主要为升速和降速过程是否快而平稳。
当负载突然增减与电压突然变化时,系统转速能否迅速地恢复。
4)、调速系统的经济性。
主要从价格、调速运行效率、调速系统故障率,售后服务与支持等方面衡量。
5)、负载转矩特性:一般来说空气、水、油等介质对机械阻力基本上都是和转速二次方成正比。
即负载转矩TZ=KN2电动直升机航模用的动力一般为无刷直流电动机,无刷直流电动机的结构与交流永磁同步电动机相似,其定子上有多相绕组,转子上镶有永磁体,无刷直流电动机的优点和关键特征如下:1)本质上是多相交流电动机,但经过控制获得类似直流电动机特性;2)需要多相逆变器驱动;3)无电刷和换相器,即使在高转速下,也可得到较高的可靠性;4)效率高;5)低的EMI6)可实施无传感器控制;按照无刷直流电动机工作原理,必须有转子磁极位置信号来决定电子开关的换相。
装有转子位置传感器(例如霍尔元件)就称为有感无刷电机。
有感无刷电机装传感器检测电气相位可分为60°/120°/180°/240°/300°等。
根据电气相位的不同,电子换相驱动方式就略有不同,开关时序将不同,如6步换相180°变频:经过6个节拍,无刷电机的定子中将产生一个旋转磁场,带动转子转动,每个开关的一个状态在连续的3个节拍中保持不变,相当于在磁场中180°的范围内保持不变。
6步换相120°变频:则每个开关的一个状态在连续的2个节拍中保持不变,相当于在磁场中120°的范围内保持不变。
位置传感器的存在占用了电动机的一些空间、安装位置对准、需要引出线等问题,随着微机控制技术的高速发展,无位置传感器控制技术和方法也获得快速进展,利用无传感器技术,无刷直流电动机不必装专门的位置传感器,从而简化电动机结构和尺寸,减少了引线,进而降低电动机成本。
模型无刷电机电调设置——20A30A40A
模型电调设置
准备工作:
1,连接把电调和马达,接收机连接。
2,打开发射机,并且把油门推到最大。
(FUTABA 发射机要把油门通道反向(REV)使用)3,接上电调电池。
设置
这个时候就可以听到马达传出来的声音并且
BEEP 。
BEEP 。
(单声间隔0.5秒)
BEEP BEEP 。
BEEP BEEP 。
(双声每组声音之间间隔0.5秒)
BEEP BEEP BEEP。
BEEP BEEP BEEP(3声每组声音之间间隔0.5秒)
而且声音1直连续循环发出。
油门收到最小,那么就是选中第1项,即LIPO电池自动保护。
这个时候的LIPO保护功能能够自己识别2个LIPO和3LIPO。
并且把保护电压设定为6.0V和9.0V
如果是BEEP连响2次就选定了NIMH电池保护。
这个时候就不能对LIPO进行保护,如果使用LIPO请选择LIPO保护选项。
3响BEEP连续时候就是第3选项,有无刹车选项。
操作1次就是把刹车取消,如果在选择1次就从新带上刹车。
如果发现选项已经过去,可以在等声音循环回来再选。
如果有2种选项同时要选,可以在电调发出确认声音的时侯马上把油门推最大,也可以从新进入设置
4,当每次把油门拉到最小,电调就会发出声音确认功能选择。
5,此时,等待2秒,电调会发出声音确定电池类别:
1声长声是LIPO保护
3声短声是NIMH保护
这个时候推油门就可以使用了。