[整理]kinco 步进电机驱动458.
步进电机与驱动器原理是什么
步进电机与驱动器原理是什么
步进电机在现代的工业生产设备中使用程度大大提升,企业大量引进步进电机,步进电机驱动器是步进电机启动的主要动力,在步进电机中的作用是显而易见的。
步进电机可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、或角位移发生器等。
步进电机的新旧不是关键,一些从旧设备上拆下的步进电机对它进行适当的修改,然后安装上自己设计驱动器,他会像新的步进电机一样工作。
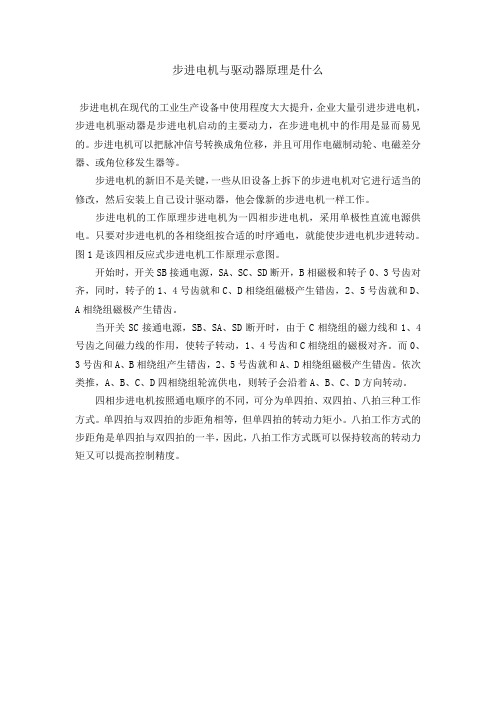
步进电机的工作原理步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
KINCO KINCO步进电机 步进电机、 KINCO
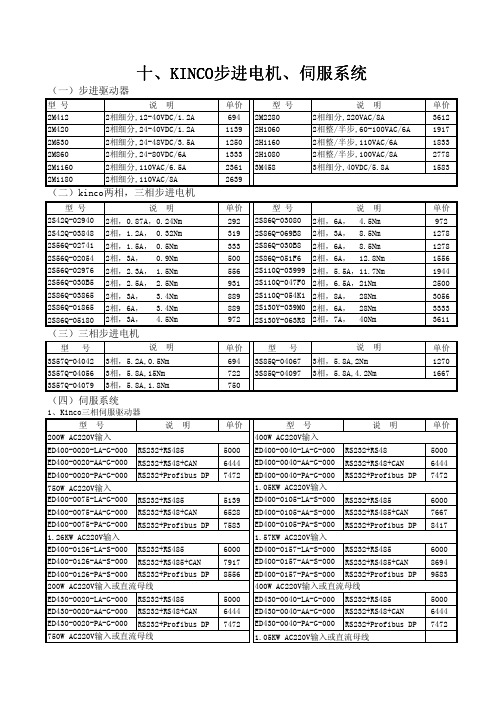
型号
说明
200W额定转速3000转/分 小惯量伺服电机
60S-0020-30AAA-4LG 不带键槽 60S-0020-30AAK-4LG 带键槽
60S-0020-30ABA-4LG 带抱闸
750W额定转速3000转/分 小惯量伺服电机
80S-0075-30AAA-4LG 不带键槽
80S-0075-30AAK-4LG 带键槽 80S-0075-30ABA-4LG 带抱闸
155D-0300-20AAA-3HG 不带键槽
155D-0300-20AAK-3HG 带键槽
155D-0300-20ABA-3HG 带抱闸
6000 7667 8417
6000 8694 9583
7583 8806 9639
10944 11778 13722
11833 12667 16000
单价
2611 2611 5500
2.5KW AC380V输入或直流母线 ED630-0250-LA-G-000 RS232+RS485 ED630-0250-AA-G-000 RS232+RS485+CAN ED630-0250-PA-G-000 RS232+Profibus DP
4KW AC380V输入或直流母线 ED630-0400-LA-G-000 RS232+RS485 ED630-0400-AA-G-000 RS232+RS485+CAN ED630-0400-PA-G-000 RS232+Profibus DP
型号
说明
2S42Q-02940 2相,0.87A,0.24Nm
2S42Q-03848 2相,1.2A, 0.32Nm
一文搞懂步进电机特性原理及驱动器设计
一文搞懂步进电机特性原理及驱动器设计1、步进电机的概念步进电机是将电脉冲信号,转变为角位移或线位移的开环控制电机,又称为脉冲电机。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。
当步进驱动器接收到一个脉冲信号时,它就可以驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”。
步进电机的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的,同时可以通过控制脉冲频率,来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机多用于数字式计算机的外部设备,以及打印机、绘图机和磁盘等装置。
2、步进电机的特点步进电机工作时的位置和速度信号不反馈给控制系统,如果电机工作时的位置和速度信号反馈给控制系统,那么它就属于伺服电机。
相对于伺服电机,步进电机的控制相对简单,但不适用于精度要求较高的场合。
步进电机的优点和缺点都非常的突出,优点集中于控制简单、精度高,缺点是噪声、震动和效率,它没有累积误差,结构简单,使用维修方便,制造成本低。
步进电机带动负载惯量的能力大,适用于中小型机床和速度精度要求不高的地方,缺点是效率较低、发热大,有时会“失步”。
优缺点如下所示。
优点:1. 电机操作易于通过脉冲信号输入到电机进行控制;2. 不需要反馈电路以返回旋转轴的位置和速度信息(开环控制);3. 由于没有接触电刷而实现了更大的可靠性。
缺点:1. 需要脉冲信号输出电路;2. 当控制不适当的时候,可能会出现同步丢失;3. 由于在旋转轴停止后仍然存在电流而产生热量。
3、步进电机的分类在相同电流且相同转矩输出的条件下,单极型步进电机比双极型步进电机多一倍的线圈,成本更高,控制电路的结构也不一样,目前市场上流行的大多是双极型步进电机。
步进电机在构造上通常主要按照转子特点和定子绕组进行分类,下面将详细介绍这两种类型的分类。
按照转子分类,有三种主要类型:反应式(VR型)、永磁式(PM型)、混合式(HB型)。
Kinco伺服产品技术交流分享(基础篇)

物流行业营销部
01 如何让电机转起来?
1.接线-FD1X3-CA
CAN接口
必须接 CAN终端电阻拨码 编码器接口
232调试口
动力线接口
图中由左往右:DC+、DC-、NC、RB+、RB-、U、V、W、PE
根据需求 CAN ID拨码 232调试口
CAN接口
IO接口
1.速度模式
-3 立即速度模式 3 速度模式
相关参数: 工作模式:-3/3 目标速度: 梯形加/减速度: 控制字:F/6
2.位置模式
1 位置模式 相关参数:
工作模式:1 梯形速度: 梯形加/减速度: 目标位置: 控制字:
6/F→103F 根据目标位置变化 立即绝对定位
6/2F→3F 绝对位置 6/4F→5F 相对位置
CAN地
IO口
引脚 1 2 3 4 5 6
7 8~ 10 11
12
名称 PUL+ PULDIR+ DIROUT1 OUT2/ BR+ COMI IN1~ IN3 IN4/ BRCOMO
功能 脉冲输入
信号输出端 信号输出端
/抱闸 输入公共端 信号输入端
信号输入端 /抱闸
输出公共端
备注:当电机需要制动(急停)或外部动力带动电机高速旋转情况下需要通过RB-,RB+外接制动电阻
4.设置参数
1.打开“驱动器D→基本操 作” 2.将“工作模式”写入3 3.将“目标速度”写入100 4.将“控制字”写入F,此 时电机就转起来了 5.若需要电机停止,只需 将“控制字”改为6即可
02 模式控制
工作模式
-4 脉冲模式 -3 立即速度模式 4 力矩模式 1 位置模式 3 速度模式 6 找原点模式 7 插补模式
步进驱动器工作原理

步进驱动器工作原理步进驱动器是一种用于控制步进电机运动的电子设备。
步进电机是一种将电脉冲转换为机械运动的电机,它可以精确地控制电机转动的角度和速度。
步进驱动器是将电脉冲转换为步进电机的驱动信号的设备,它的工作原理是将输入的电脉冲转换为电机的运动,从而控制电机的转动。
步进驱动器的工作原理可以分为两个部分:控制电路和功率电路。
控制电路用于接收和解码外部控制信号,将其转换为电机的驱动信号。
功率电路用于将控制电路产生的驱动信号转换为电机的驱动能量,从而实现电机的运动。
控制电路的主要功能是接收来自外部的控制信号,并将其转换为电机的驱动信号。
控制电路由逻辑门、计数器、时钟发生器和解码器等组成。
逻辑门用于控制输入信号的流向和转换,计数器用于计数输入信号的个数,时钟发生器用于产生时序信号,解码器用于将计数器产生的数字信号转换为电机的驱动信号。
功率电路的主要功能是将控制电路产生的驱动信号转换为电机的驱动能量,从而实现电机的运动。
功率电路由功率放大器和电机驱动器等组成。
功率放大器用于放大控制信号的电压和电流,从而产生足够的驱动能量,电机驱动器用于将功率放大器产生的电信号转换为电机的驱动信号。
步进驱动器的控制方式可以分为开环控制和闭环控制两种。
开环控制是指控制电路只接收外部的控制信号,并将其转换为电机的驱动信号,而不对电机的运动进行反馈控制。
闭环控制是指控制电路不仅接收外部的控制信号,还通过传感器对电机的运动进行反馈控制,从而实现更加精确的控制。
在步进驱动器的运动过程中,由于电机的惯性和负载的影响,电机的运动会产生误差。
为了减小误差,步进驱动器通常采用微步控制技术。
微步控制技术是指将一个步进电机的步长分解为多个微步,从而实现更加精确的控制。
微步控制技术可以通过改变控制信号的频率和相位来实现,从而使电机的转动更加平稳和精确。
总之,步进驱动器是一种用于控制步进电机运动的电子设备,它的工作原理是将输入的电脉冲转换为电机的运动。
KINCO ED系列伺服驱动器使用手册
步进电动机驱动系统的基本知识
有关步进电动机驱动系统的基本知识1、系统常识:步进电动机和步进电动机驱动器构成步进电机驱动系统。
步进电动机驱动系统的性能,不但取决于步进电动机自身的性能,也取决于步进电动机驱动器的优劣。
对步进电动机驱动器的研究几乎是与步进电动机的研究同步进行的。
2、系统概述:步进电动机是一种将电脉冲转化为角位移的执行元件。
当步进电动机驱动器接收到一个脉冲信号(来自控制器),它就驱动步进电动机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
3、系统控制:步进电动机不能直接接到直流或交流电源上工作,必须使用专用的驱动电源(步进电动机驱动器)。
控制器(脉冲信号发生器)可以通过控制脉冲的个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
4、用途:步进电动机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的发展(步进电动机驱动器性能提高),步进电动机的需求量与日俱增。
步进电动机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化控制系统,特别是开环控制系统。
5、步进电机按结构分类:步进电动机也叫脉冲电机,包括反应式步进电动机(VR)、永磁式步进电动机(PM)、混合式步进电动机(HB)等。
(1)反应式步进电动机:也叫感应式、磁滞式或磁阻式步进电动机。
其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。
一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到10‟);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。
(2)永磁式步进电动机:通常电机转子由永磁材料制成,软磁材料制成的定子上有多相励磁绕组,定、转子周边没有小齿和槽,通电后利用永磁体与定子电流磁场相互作用产生转矩。
步进3M458驱动器总结

步进3M458(Kinco驱动器)总结
外部接线图
在驱动器的侧面连接端子中间有一个红色的八位DIP功能设定开关,可以用来设定驱动器的工作方式和工作参数,使用前请务必仔细阅读参考.
DIP正视图
开关序号ON功能OFF功能
DIP1-DIP3 细分设置细分设置
DIP4 静态电流全流静态电流半流
DIP5-DIP8 电流设置电流设置
细分设定如下
DIP1 DIP2 DIP3 细分
ON ON ON 400步每转ON ON OFF 500步每转ON OFF ON 600步每转ON OFF OFF 1000步每转OFF ON ON 2000步每转OFF ON OFF 4000步每转OFF OFF ON 5000步每转OFF OFF OFF 10000步每转
DIP5 DIP6 DIP7 DIP8 输出电流OFF OFF OFF OFF 3.0A OFF OFF OFF ON 4.0A OFF OFF ON ON 4.6A OFF ON ON ON 5.2A ON ON ON ON 5.8A
电流设定
程序简介。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第七章步进控制
步进电机(step motor)—脉冲电机
电脉冲信号→角位移或直线位移。
给步进电动机输入一个电脉冲信号时,它就转过一定的角度或移动一定的距离。
由于其输出的角位移或直线位移可以不是连续的,因此称为步进电动机。
优点:
角位移或线位移与脉冲数成正比,其转速n或线速度v与脉冲频率成正比。
在负载能力范围内,这种关系不会因电压波动、负载变化、温度变化等原因而变化,其控制性能很好。
步进电动机广泛用于数控机床、打印机等控制系统中。
反应式步进电机结构
定子:6个磁极,分为3相,每个磁极上都套有一个绕组。
转子:均匀分布的4个齿,无绕组。
1、单三拍控制
A相绕组通电时,B、C两相不通电,气隙中生成以A-A’为轴线的磁场。
由于磁力线总是要通过磁阻最小的路径闭合,将使转子齿1、3和定子A-A’对齐,即产生A-A’轴线方向的磁通。
如果A相绕组不断电,1、3两转子齿就一直被磁极A-A吸引住而不改变其位置,即转子具有自锁能力。
B相绕组通电时,A、C两相不通电,气隙中生成以B-B’为轴线的磁场。
由于磁力线总是要通过磁阻最小的路径闭合,将使离磁极B-B’最近的转子齿2、4和定子B-B’对齐,即产生B-B’轴线方向的磁通。
C相绕组通电时,A、B两相不通电,气隙中生成以C-C’为轴线的磁场。
由于磁力线总是要通过磁阻最小的路径闭合,将使离磁极C-C’最近的转子齿1、3和定子C-C’对齐,即产生C-C’轴线方向的磁通。
2、双三拍控制
3、单、双六拍工作方式
步进电机是Kinco三相步进电机3S57Q-04056,与之配套的驱动器为Kinco 3M458三相步进电机驱动器。
1、3S57Q-04056部分技术参数如表7-2所示:
3S57Q-04056的三个相绕组必须连接成三角形,接线图如图7-10所示。
2、Kinco 3M458三相步进电机驱动器主要电气参数如下:
供电电压:直流24V~40V
输出相电流:3.0A~5.8A
控制信号输入电流:6~20mA
冷却方式:自然风冷
该驱动器具有如下特点;
①采用交流伺服驱动原理,具备交流伺服运转特性,三相正弦电流输出。
②内部驱动直流电压达40V,能提供更好的高速性能。
③具有电机静态锁紧状态下的自动半流功能,可大大降低电机的发热。
④具有最高可达10000步/转的细分功能,细分可以通过拨动开关设定。
⑤几乎无步进电机常见的共振和爬行区,输出相电流通过拨动开关设定。
⑥控制信号的输入电路采用光耦隔离。
⑦采用正弦的电流驱动,使电机的空载起跳频率达5kHz,(1000步/转)左右。
在3M458 驱动器的侧面连接端子中间有一个红色的八位DIP功能设定开关,可以用来设定驱动器的工作方式和工作参数。
图7-11是该DIP开关功能说明。
3M458 DIP开关功能说明
驱动器的典型接线图如图7-12所示,335A中,控制信号输入端使用的是DC24V电压,所使用的限流电阻R1为2KΩ。
3M458的典型接线图
驱动器还有一对脱机信号输入线FREE+和FREE-,当这一信号为ON时,驱动器将断开输入到步进电机的电源回路。
335A没有使用这一信号,目的是使步进电机在上电后,即使静止时也保持自动半流的锁紧状态。
335A为3M458 驱动器提供的外部直流电源为DC24V,6A输出的开关稳压电源,直流电源和驱动器一起安装在模块盒中,驱动器的引出线均通过安全插孔与其他设备连接。
图7-13是3M458步进电机驱动器模块的面板图。
M458步进电机驱动器模块的面板
3、步进电机传动组件的基本技术数据
3S57Q-04056步进电机步距角为1.8度,即在无细分的条件下200个脉冲电机转一圈(通过驱动器设置细分精度最高可以达到10000个脉冲电机转一圈)。
输送站传动采用同步轮和同步带,同步轮齿距为5mm、共11个齿即旋转一周搬运机械手位移55mm。
YL335-A系统中为达到控制精度驱动器细分设置为10000步/转即(每步机械手位移
0.0055mm)电机驱动电流设位5.2A。
FX1n PLC的脉冲输出功能
晶体管输出的FX1N 系列PLC CPU单元支持高速脉冲输出功能,但有如下限制:
⑴高速脉冲输出仅限于Y000和Y001点。
⑵在FX1N可编程控制器中,不连接虚拟电阻,在DC5-24V(10-100mA)的条件下,也能输出100KHZ以下的频率的脉冲。
输送单元上Kinco 3M458三相步进电机驱动器控制信号输入电流为6~20mA,为了与FX1N 脉冲输出端匹配,应在脉冲输出端(Y0或Y1)与电源正极间并联虚拟电阻。
同时,步进电机驱动器的细分开关应设置较低值(例如5000步/转)。
对输送单元步进电机的控制主要是返回原点和定位控制,可以使用FX1N的脉冲输出指令FNC57(PLSY)和带加减速的脉冲输出指令FNC59(PLSR)实现。
脉冲输出指令FNC57(PLSY)
PLSY指令的功能是以指定的频率产生定量脉冲。
指令格式如图7-12所示:
[S1•]:指定频率,对于FX1n,范围为 2~100000(Hz)。
[S2•]: 指定产生脉冲的数目。
允许设定的脉冲数的范围为:16位指令可设1~32767个脉冲,32位指令可设1~2 147 483 647个脉冲。
若指定脉冲数为“0”,则对产生的脉冲不受限制。
若用(D)PLSY指令,则脉冲数用(D0,D1)来指定。
[D•]:指定脉冲输出的Y地址号(仅限于Y000或Y001)。
编程PLSY指令时,须注意如下几点:
⑴脉冲的占空比为50%,输出控制不受扫描周期的影响,采用中断方式处理。
⑵在指令执行过程中,若更改[S1•]指定的字软元件内容,输出频率也随之改变。
若变更[S2•]指定的字软元件内容后,将从下一个指令驱动开始执行变更内容。
若X000变为OFF,则脉冲输出停止,X000再次置ON时,脉冲再次输出,但脉冲数从头开始计算。
⑶设定的脉冲数输出完成后,完成标志M8029置“1”,当PLSY指令从ON变为OFF时,M8029复位。
⑷ PLSY指令可以在程序中反复使用,但是在设计驱动指令时序时,须注意避免同时驱动产生双重线圈输出,以及两次驱动之间的时间间隔。
1.1.1.1带加减速的脉冲输出指令FNC59(PLSR)
PLSR是带加减速功能的定尺寸传送用的脉冲输出指令。
指令格式如图7-14所示。
图7-14 PLSR的指令格式
指令执行时,针对[S1•]指定的最高频率进行加速,在达到指定的脉冲数后,进行定减速,如图7-15所示,图中还标明了各操作数的含义和取值范围。
图7-15 PLSR的脉冲输出图
编程PLSR指令时须注意的问题与编程PLSY指令类似,但在执行中修改任一个操作数,运转都不会反映,变更内容从下一个指令驱动才有效。
此外,在编程PLSR指令时还要注意各操作数的相互配合:
①加减速时的变速级数固定在10级,故一次变速量是最高频率1/10。
因此设定最高频率时应考虑在步进电机不失步的范围内。
②加减速时间至少不小于PLC的扫描时间最大值(D8012值)的10倍,否则加减速各级时间不均等。
(更具体的设定要求,请参阅FX1N编程手册)
1.1.1.2与脉冲输出功能有关的主要特殊内部存储器
从Y000或Y001输出的脉冲数将保存于以下特殊数据寄存器中。
[D8141,D8140] 输出至Y000的脉冲总数
[D8143,D8142] 输出至Y001的脉冲总数
[D8136,D8137] 输出至Y000和Y001的脉冲总数
各个数据寄存器内容可以利用“(D)MOV K0 D81□□”执行清除。