机械工程控制课后习题答案_星期一考试用得上
机械控制工程课后习题解答
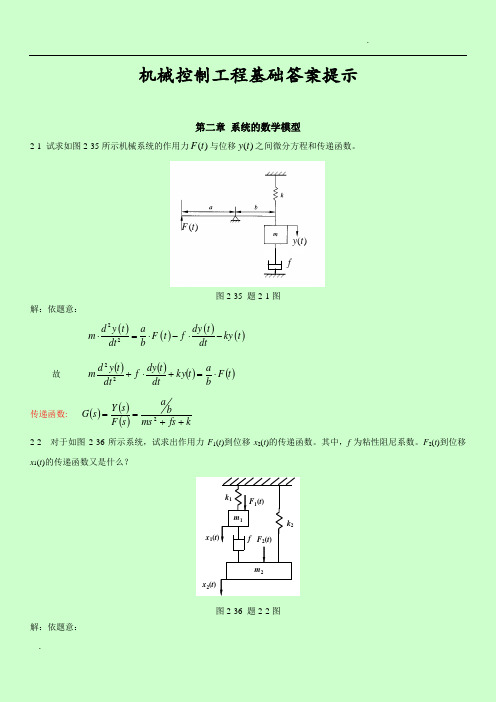
机械控制工程基础答案提示第二章 系统的数学模型2-1 试求如图2-35所示机械系统的作用力)(t F 与位移)(t y 之间微分方程和传递函数。
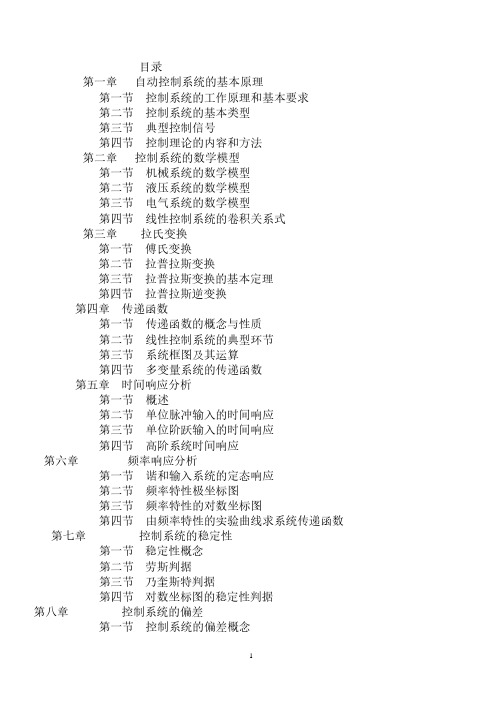
)(t F )(t y f图2-35 题2-1图解:依题意:()()()()22d y t dy t a m F t f ky t dt b dt⋅=⋅-⋅- 故 ()()()()t F b at ky dt t dy f dt t y d m⋅=+⋅+22 传递函数: ()()()kfs ms b as F s Y s G ++==22-2 对于如图2-36所示系统,试求出作用力F 1(t )到位移x 2(t )的传递函数。
其中,f 为粘性阻尼系数。
F 2(t )到位移x 1(t )的传递函数又是什么?m 2m 1k 1 f k 2F 1(t )F 2(t ) x 2(t )x 1(t )图2-36 题2-2图解:依题意:对1m : ()()()()212121111dt t x d m dt t dx dtt dx f t x k F =⎥⎦⎤⎢⎣⎡--- 对两边拉氏变换:()()()[]()s X s m s sX s sX f x k s F 12121111=--- ①对2m : ()()()()()222222212dt t x d m t x k dt t dx dt t dx f t F =-⎥⎦⎤⎢⎣⎡-+ 对两边拉氏变换:()()()[]()()s X s m s x k s sx s sx f s F 22222212=--+ ②故: ()()()()()()()()⎩⎨⎧=+++-=-++S F s x k fs s m s fsx s F s fsx s x k fs s m 222221121121 故得:()()()()()()()()()()()()()()⎪⎪⎩⎪⎪⎨⎧-+++++++=-+++++++⋅=22221212212122222121222211fs k fs s m k fs s m k fs s m s F s fsF s x fs k fs s m k fs s m s fsF k fs s m s F s x 故求()t F 1到()t x 2的传递函数 令:()02=s F()()()()()()()()()2122211122432121212211212x s fsG s F s m s fs k m s fs k fs fsm m s f m m s m k m k s f k k s k k ==++++-=+++++++求()t F 2到()t x 1的传递函数 令:()01=s F()()()()()()()()()1122221122432121212211212x s fsG s F s m s fs k m s fs k fs fsm m s f m m s m k m k s f k k s k k ==++++-=+++++++2-3 试求图2-37所示无源网络传递函数。
《机械工程控制基础》课后答案

目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章 自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节 控制系统的工作原理和基本要求 一、 控制系统举例与结构方框图例1. 一个人工控制的恒温箱,希望的炉水温度为100C °,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
煤炭给定的温度100 C手和锹眼睛实际的炉水温度比较图2例2. 图示为液面高度控制系统原理图。
试画出控制系统方块图 和相应的人工操纵的液面控制系统方块图。
《机械工程控制基础》课后题答案解析

机械工程控制基础目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节控制系统的工作原理和基本要求一、控制系统举例与结构方框图例1.一个人工控制的恒温箱,希望的炉水温度为100C°,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
煤炭给定的温度100 C手和锹眼睛实际的炉水温度比较图2例2.图示为液面高度控制系统原理图。
试画出控制系统方块图和相应的人工操纵的液面控制系统方块图。
《机械工程控制基础》课后答案.pdf
第二节 拉普拉斯变换
第三节 拉普拉斯变换的基本定理
第四节 拉普拉斯逆变换
第四章 传递函数
第一节 传递函数的概念与性质
第二节 线性控制系统的典型环节
第三节 系统框图及其运算
第四节 多变量系统的传递函数
第五章 时间响应分析
第一节 概述
第二节 单位脉冲输入的时间响应
第三节 单位阶跃输入的时间响应
第四节 高阶系统时间响应
X(t)=0
其它
X(t)
一 AT
0
t
图8
脉冲函数的强度为 A,即图形面积。 单位脉冲函数(δ 函数)定义为 δ(t)= d 1(t)
dt
性质有: δ(t)=0 t≠0
δ(t)=∞ t=0
且
(t)dt = 1
−
5
X(t)
δ(t)
0
t
图9
强度为 A 的脉冲函数 x(t)也可写为 x(
t)=Aδ(t) 必须指出,脉冲函数 δ(t)在现实中是不存在的,它只有数学上的意
第六章
频率响应分析
第一节 谐和输入系统的定态响应
第二节 频率特性极坐标图
第三节 频率特性的对数坐标图
第四节 由频率特性的实验曲线求系统传递函数
第七章
控制系统的稳定性
第一节 稳定性概念
第二节 劳斯判据
第三节 乃奎斯特判据
第四节 对数坐标图的稳定性判据
第八章
控制系统的偏差
第一节 控制系统的偏差概念
1
第二节 输入引起的定态偏差 第三节 输入引起的动态偏差 第九章 控制系统的设计和校正 第一节 综述 第二节 希望对数幅频特性曲线的绘制 第三节 校正方法与校正环节 第四节 控制系统的增益调整 第五节 控制系统的串联校正 第六节 控制系统的局部反馈校正 第七节 控制系统的顺馈校正
《机械工程控制基础》课后答案
目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节控制系统的工作原理和基本要求一、控制系统举例与结构方框图例1.一个人工控制的恒温箱,希望的炉水温度为100C°,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
比较图2例2.图示为液面高度控制系统原理图。
试画出控制系统方块图和相应的人工操纵的液面控制系统方块图。
解:浮子作为液面高度的反馈物,自动控制器通过比较实际的液面高度与希望的液面高度,调解气动阀门的开合度,对误差进行修正,可保持液面高度稳定。
机械工程控制基础课后答案
目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节控制系统的工作原理和基本要求一、控制系统举例与结构方框图例1.一个人工控制的恒温箱,希望的炉水温度为100C°,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
煤炭给定的温度100 C手和锹眼睛比较图2例2. 图示为液面高度控制系统原理图。
试画出控制系统方块图 和相应的人工操纵的液面控制系统方块图。
解:浮子作为液面高度的反馈物,自动控制器通过比较实际的液面高度与希望的液面高度,调解气动阀门的开合度,对误差进行修正, 可保持液面高度稳定。
机械工程控制习题及答案

机械工程控制习题及答案机械工程控制习题及答案控制是机械工程中非常重要的一部分,它涉及到了机械系统的运行和稳定性。
在机械工程的学习过程中,控制习题是非常重要的一环。
通过解决习题,我们可以加深对控制原理和方法的理解,并提高自己的解决问题的能力。
下面,我将为大家提供一些机械工程控制习题及答案,希望对大家的学习有所帮助。
1. 一个质量为m的物体通过一个弹簧与一个固定点相连,弹簧的劲度系数为k。
物体在无外力作用下的运动方程是什么?答案:根据牛顿第二定律,物体的运动方程可以表示为F = ma,其中F为物体受到的合力,m为物体的质量,a为物体的加速度。
在这个问题中,物体受到的合力可以表示为F = -kx,其中x为物体与平衡位置的位移。
因此,物体的运动方程可以表示为ma = -kx,即m(d^2x/dt^2) = -kx。
2. 一个质量为m的物体通过一个弹簧与一个固定点相连,弹簧的劲度系数为k。
如果物体的初始位移为x0,初始速度为v0,求物体的运动方程。
答案:根据上一题的结果,物体的运动方程可以表示为m(d^2x/dt^2) = -kx。
我们可以通过求解这个微分方程来得到物体的运动方程。
假设物体的运动方程为x = Acos(ωt + φ),其中A为振幅,ω为角频率,φ为初相位。
将这个方程代入微分方程中,可以得到mω^2Acos(ωt + φ) = -kAcos(ωt + φ)。
通过比较两边的系数,可以得到ω = sqrt(k/m),即角频率与劲度系数和质量有关。
因此,物体的运动方程可以表示为x = Acos(sqrt(k/m)t + φ)。
3. 一个质量为m的物体通过一个阻尼器与一个固定点相连,阻尼器的阻尼系数为b。
物体在无外力作用下的运动方程是什么?答案:在有阻尼的情况下,物体的运动方程可以表示为F = ma + bv,其中v为物体的速度。
根据牛顿第二定律,物体的运动方程可以表示为ma + bv = 0,即m(d^2x/dt^2) + b(dx/dt) = 0。
机械工程控制基础答案
《机械工程控制基础》习题答案(1)生活中常见开环控制系统与闭环控制系统综合性能分析:如汽车空调的温度控制与冷库温度控制综合性能分析。
答:开环系统是指系统的输出端与输入端之间不存在反馈,也就是控制系统的输出量不对系统的控制产生任何影响。
其特点是结构简单,比较经济,但系统静特性差,控制精度不高,抗干扰能力差。
闭环控制系统是基于反馈原理建立的自动控制系统。
所谓反馈原理,就是根据系统输出变化的信息来进行控制,即通过比较系统行为(输出)与期望行为之间的偏差,并消除偏差以获得预期的系统性能。
其特点是结构复杂,但是控制精度高,动态性能好,抗干扰能力强。
同开环控制系统相比,闭环控制具有一系列优点。
在反馈控制系统中,不管出于什么原因(外部扰动或系统内部变化),只要被控制量偏离规定值,就会产生相应的控制作用去消除偏差。
因此,它具有抑制干扰的能力,对元件特性变化不敏感,并能改善系统的响应特性。
但反馈回路的引入增加了系统的复杂性,而且增益选择不当时会引起系统的不稳定。
为提高控制精度,在扰动变量可以测量时,也常同时采用按扰动的控制(即前馈控制)作为反馈控制的补充而构成复合控制系统。
生活中闭环和开环控制的例子很多,比如汽车空调的温度控制,低端用手动开环控制,这种控制精度不高,而好一点的都用自动闭环控制,闭环控制更加节省能源,精度高,增加用户的舒适度(通过调节温度风门实现)。
又比如冷库温度控制,一般都是闭环PID,也比较容易实现,温度控制比较稳定,也就是制冷机组的控制,电加热器功率调节,如用开环控制则很明显温度调节不准,标定移植都不便。
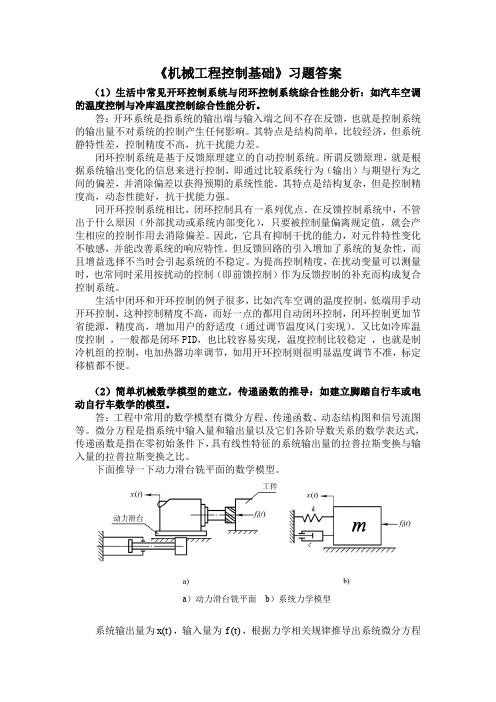
(2)简单机械数学模型的建立,传递函数的推导:如建立脚踏自行车或电动自行车数学的模型。
答:工程中常用的数学模型有微分方程、传递函数、动态结构图和信号流图等。
微分方程是指系统中输入量和输出量以及它们各阶导数关系的数学表达式,传递函数是指在零初始条件下,具有线性特征的系统输出量的拉普拉斯变换与输入量的拉普拉斯变换之比。