波浪补偿起重机优化设计方法研究_田洪清
基于补偿技术的起重机深水波浪补偿系统研发
2)轨道激励频率为2.6 Hz时,轨道垂向不平顺线路对转向架摇枕动应力的影响最大。
3)轨道垂向不平顺激励下,摇枕动应力的分布与静应力的分布相同。
4)轨道垂向不平顺激励频率为2.6 Hz时,摇枕关键部位的垂向动荷系数达到最大,其平均垂向动荷系数为0.786 7。
参考文献[1] 蔡成标,翟婉明,王其昌.轨道几何不平顺安全限值的研究[J].铁道学报,1995,17(4):82-87.[2] 中华人民共和国铁道部.铁路线路维修规则[M].北京:中国铁道出版社,1997.[3] 练松良,黄俊飞.客货共运线路轨道不平顺不利波长的分析研究[J].铁道学报,2004,26(2):111-115.作者:方桂花电子邮箱:btbclidan@收稿日期:2017-07-03基于补偿技术的起重机深水波浪补偿系统研发*孙泳涛南通振华重型装备制造有限公司 南通 226010摘 要:为突破波浪补偿技术的研发瓶颈,提出了补偿技术的工作原理,通过对补偿系统结构和主动波浪技术的自主研发,解决了二次液压控制技术、信号检测系统和电气控制算法等关键难点,成功研制了带有主动波浪补偿技术的30 t起重机,该起重机可以实现水下600 m以内区域的补给、海洋钻井、深海探测等工作,提高了海上作业的安全性、高效性和可靠性。
Abstract: The paper proposes the working principle of compensation technology to break the bottleneck hindering the development of wave compensation technology. Key difficulties such as secondary hydraulic control technology, signal detection system and electrical control algorithm are solved through independent research and development of compensation system structure and active wave technology, and 30 t crane based on active wave compensation technology is successfully developed. The crane is capable of replenishment, offshore drilling and deep sea exploration within 600 m underwater, which makes offshore operations more secure, efficient and reliable.关键词:起重机;主动波浪补偿;二次液压控制;信号检测;控制算法Keywords: crane; active wave compensation; secondary hydraulic control; signal detection; control algorithm中图分类号:TH 218 文献标识码:B 文章编号:1001-0785(2018)03-0124-040 引言随着国内对海洋资源不断的深入开发,各类工程船舶、海洋钻井平台越来越多地进入到深海区域进行作业。
波浪补偿起重机液压系统设计与分析
波浪补偿起重机液压 系统设计与分析
王孝霖 ,顾 含 ,许 历 ,李 乙迈,韩星星,雷 雨
( 中国卫星海 E 测捂涪B ,江苏江阴 2 1 43装 中的波浪补偿难题,首先分析 了波浪补偿的基本原理,然 后介绍了被动式和主动式波浪补偿技术的实现方式和特点,最后设计 了一种采用主动式波浪补偿的 船用起重机,并对其液压系统进行 了分析。 关键词 :起重机;波浪补偿;液压系统;液压缸;泵站
2 0 1 5 / 4 船舶标准化工程师 6 3
即货物相对于接受船 B的下放速度 兰与两船的相 对速度 ( 一 : ) 无关 ,货物就可 以由起重机 以速度
。
某大型船舶在近远海物质补给和物品转载时
0 引言
船用起重机是在海 靼不 境中进行作业的特种起
及特殊物品吊 装作 岫勺 要求, 需要采用具有波浪补
偿功能的船用起重机。
重初械 ,远洋船舶在海 E 进行货物运输及物资补给
时, 往往要f 娴 船 凌 进 亍 车 专 载作业。 转封 乍 业时, 两船 敷 于箭 白 或漂泊状态, 通过系缆并
Wa n g Xi a o - l i n , Gu Ha n , Xu L i , Li Yi - ma i , Ha n Xi n g - x i n g , L e i Yu
( C h i n a S a t e l l i t e Ma r i t i me T r a c k i n g a n d C o n t r o l De p a r t me n t , J i a n g s uJ i ng a y i n2 1 4 4 3 1 , C h u a a )
波浪补偿技术及其在起重机设计中的应用_龚承泽
止状态,保护挂钩者的安全。
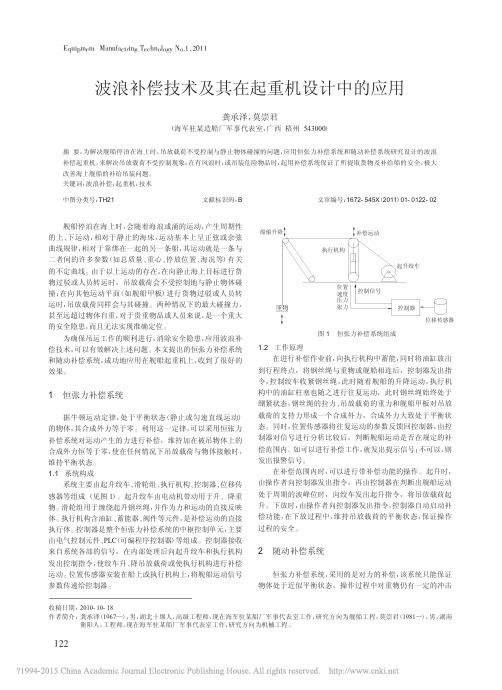
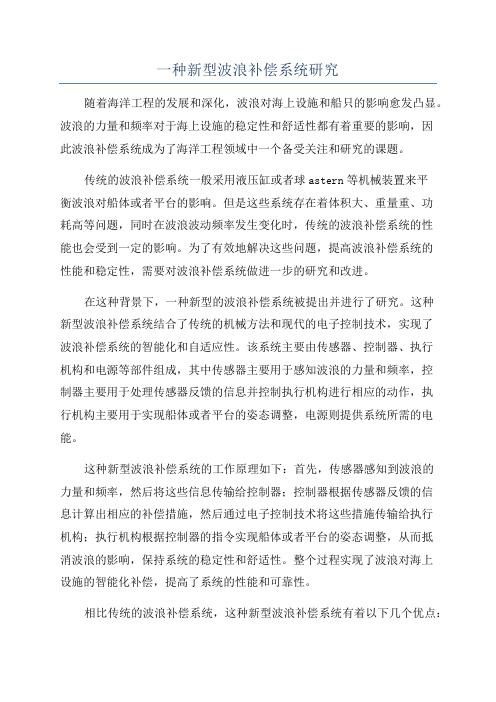
研究设计的波浪补偿起重机结构如图 3 所示,主要由电
(3) 设计制造的波浪补偿起重机能极大改善了海上舰船
器系统、液压系统、起升系统、补偿系统、变幅系统、回转系统、 补给吊装问题。
Wave Compensation Ttechnology and in Hoist Crane Design Application
蓄能器,泵组等,是补偿功能的执行部件。随动小车由小车架、
滑轮架、滚动轴承,导向滚轮等组成,刹车装置和滑轮架也一
变幅油缸 底座 操纵台
补偿装置
松绳检测装置 起重绳
同装在小车上,共同组成补偿装置的辅助件。刹车装置利用机 械自锁原理,在钢丝绳断裂时,保证补偿装置不损坏。行走导 轨是小车行走的依托,使小车行走时保持平滑无跳动。制动导 轨与小车架上的制动块啮合产生摩擦力,从而实现刹车作用。
恒张力补偿系统,采用的是对力的补偿,该系统只能保证 物体处于近似平衡状态,操作过程中对重物仍有一定的冲击
收稿日期:2010- 10- 18 作者简介:龚承泽(1967—),男,湖北十堰人,高级工程师,现在海军驻某船厂军事代表室工作,研究方向为舰船工程;莫崇君(1981—),男,湖南
衡阳人,工程师,现在海军驻某船厂军事代表室工作,研究方向为机械工程。
起重绞车
补偿油缸
随动绳
图 3 波浪补偿起重机结构
结构件、驾驶室等部分组成。电器系统主要由电机起动箱、操 作控制箱、接线箱及各限位保护、照明系统等部分组成。液压 系统主要由电机油泵组、多路换向阀、油马达、平衡阀、滤油
器、冷却器、液位计、压力表及各压力保护等部分组成。起升系
补偿绞车
统主要由起重绞车、补偿绞车及钢丝绳、吊钩、卸扣、滑轮组等 部分组成。补偿系统主要由蓄能器、补偿装置、液压控制管路
《课程设计_波浪补偿起重机液压控制系统设计》

波浪补偿起重机液压控制系统设计摘要波浪补偿起重机是远洋运输补给船首选的其中设备。
随着我国综合国力的强大和海洋开发的日益增多,海上作业日趋频繁,对钻井平台等深海作业的人员和设备的补给也越来越重要。
而且,随着我国海军力量的强大,海上补给海军不对的补给问题也不容忽视。
为了克服在海上补给船与接收舰船补给货物时波浪运动引起两船相对横移和升沉,对吊装作业造成不利影响,特别是对于一些军用物资,具有极大危险性,绝对不允许这种情况发生,波浪补偿起重机采用了电液比例控制技术。
波浪补偿起重机,通过臂架回转和折臂补偿两船横移,通过安装在臂架上的测量索编码器检测两船的相对升沉,补偿缸驱动补偿绞车使货物与接收舰船甲板间距离的变化,避免货物与甲板突然碰撞而造成损失。
关键词:起重机;波浪补偿系统;液压驱动系统Design of Hydraulic Control System for WaveCompensation CraneAbstractWave compensation crane is the first choice of ocean transportation supply ship equipment. With China's comprehensive national strength of the powerful and Marine development of growing, operations at sea is more and more frequent, and deep sea drilling platform to work the personnel and equipment supply is more and more important. And, with a powerful force of the Chinese navy, Marine supply navy wrong supply problems also not allow to ignore. In order to overcome supply ship at sea and to receive the goods supply ship motion causing two ship relative move transversely and Ups and downs, hoisting working to cause adverse effect, especially for some military material, which has a great danger, must not allow this happens, The wave compensation crane electroh-ydraulic proportional control technology. Wave compensation cranes, through the arm frame and folding boom fill turn .Key words: Cranes; Wave compensation system; Hydraulic drive system目录1绪论 (4)波浪补偿起重机在生产中的作用 (4)波浪补偿起重机的国内外的现状及发展趋势 (5)波浪补偿起重机的基本组成 (6)2波浪补偿起重机臂架的设计 (7)2.1波浪补偿起重机臂架的设计要求及补偿原理 (7)3 波浪补偿起重机液压部件的设计 (8)3.1 波浪补偿起重机主臂液压图及分析 (8)波浪补偿起重机副臂液压图及分析 (9)波浪补偿起重机绞车起升液压图及分析 (10)波浪补偿起重机臂架回转液压图及分析 (11)波浪补偿起重机蓄能液压图及分析 (12)4 波浪补偿起重机驱动系统的设计 (13)4.1 液压系统总图及分析 (13)5 液压缸设计 (15)5.1油缸泄漏与密封问题 (15)课程设计的体会 (17)参考文献 (18)1绪论随着我国综合国力的强大和海洋开发的日益增多,海上作业日趋频繁,对钻井平台等深海作业的人员和设备的补给也越来越重要。
主动波浪补偿船用起重机吊臂的力学特性与结构优化设计
主动波浪补偿船用起重机吊臂的力学特性与结构优化设计王佳;马致远;黄岗领;卢道华
【期刊名称】《机械制造与自动化》
【年(卷),期】2024(53)3
【摘要】以新型HFTC3-12主动波浪补偿起重机吊臂结构为研究对象,对其进行载荷分析,用ABAQUS完成不同试验工况起重机结构的刚度和强度仿真分析和校核;进行起重机实测试验,验证仿真模型的准确性;对起重机基座进行拓扑优化,同时进行模态分析,验证其在主动波浪补偿状态是否发生共振。
结果表明:HFTC3-12液压折臂伸缩起重机吊臂结构刚度和强度满足相关规范要求,未发生共振,且经过优化后起重机基座质量减少了20%。
【总页数】4页(P58-61)
【作者】王佳;马致远;黄岗领;卢道华
【作者单位】江苏科技大学机械工程学院
【正文语种】中文
【中图分类】TH21
【相关文献】
1.基于DSP的主动式波浪补偿起重机控制系统设计
2.波浪补偿起重机基座加强结构优化设计
3.船用起重机液压缸式主动波浪升降补偿装置研究
4.波浪补偿下舰船液压起重机结构优化设计
5.主动波浪补偿起重机控制系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
舰船液压起重机波浪补偿消摆控制技术研究
舰船液压起重机波浪补偿消摆控制技术研究蔡冬林【摘要】舰船上的液压起重机工作在动态颠簸过程中,很容易受到波浪的影响造成摇摆.为此提出一种小区域分区进化算法来解决舰船液压起重机波浪补偿消摆控制问题.在控制算法中引入排挤因子,利用控制数据中的相互约束作用形成小的控制单元,以此来提高收敛的速度,维持控制过程的快速性,保证控制精度.实验表明,这种方法能够有效解决舰船液压起重机波浪补偿消摆控制问题,保证了船舶机械自动控制的准确性.%The hydraulic crane working on the ship is easy to be affected by the wave during the dynamic process of turbulence. To solve this problem, a new algorithm to solve the problem of wave compensation and control for shiphydraul-ic crane is proposed. The crowding factor in the control algorithm, the control function of the data in the form of mutualre-straint in order to control small units, in order to improve the convergence speed, speed to maintain process control, ensure the control precision. The experimental results show that this method can effectively solve the problem of wavecompensa-tion and anti swing control of the ship hydraulic crane, and ensure the accuracy of the automatic control of the ship'sma-chinery.【期刊名称】《舰船科学技术》【年(卷),期】2017(039)001【总页数】5页(P104-108)【关键词】舰船液压起重机;波浪补偿;控制技术【作者】蔡冬林【作者单位】南通航运职业技术学院轮机工程系,江苏南通 226010【正文语种】中文【中图分类】U664近年来,舰船用液压起重机的稳定控制问题,已成为舰船科学中的最主要研究问题,其应用于船舶结构工程、船舶水力工程、船舶设计工程与电子工程等众多领域中[1]。
一种船舶起重机波浪补偿辅助装置和补偿方法[发明专利]
![一种船舶起重机波浪补偿辅助装置和补偿方法[发明专利]](https://img.taocdn.com/s3/m/688a84307f1922791788e87e.png)
专利名称:一种船舶起重机波浪补偿辅助装置和补偿方法专利类型:发明专利
发明人:戴炼,朱云,于会民,严兴腊,翁朝阳
申请号:CN201610790337.6
申请日:20160831
公开号:CN106185647A
公开日:
20161207
专利内容由知识产权出版社提供
摘要:本发明涉及一种船舶起重机波浪补偿辅助装置,包括导轨、小车、钢丝绳卡钩、纵向补偿液压缸、横向补偿液压缸和PLC控制器,其中小车沿所述导轨运动;纵向补偿液压缸固定在小车上方,纵向补偿液压缸设置有第一活塞杆;第一活塞杆与钢丝绳卡钩连接;横向补偿液压缸设置有第二活塞杆;第二活塞杆与小车连接;纵向补偿液压缸和横向补偿液压缸分别连接到PLC控制器。
另外,本发明也涉及一种船舶起重机波浪补偿方法。
本发明提供的船舶起重机波浪补偿辅助装置结构简单,操作方便;通过本发明提供的补偿辅助装置和补偿方法,能够实时补偿船舶横摇、纵摇以及横移、纵移对起吊钢丝绳所带来的耦合影响。
申请人:润邦卡哥特科工业有限公司
地址:215427 江苏省苏州市太仓港经济技术开发区港区荡茜口
国籍:CN
代理机构:北京连和连知识产权代理有限公司
代理人:张建鹏
更多信息请下载全文后查看。
一种新型波浪补偿系统研究
一种新型波浪补偿系统研究随着海洋工程的发展和深化,波浪对海上设施和船只的影响愈发凸显。
波浪的力量和频率对于海上设施的稳定性和舒适性都有着重要的影响,因此波浪补偿系统成为了海洋工程领域中一个备受关注和研究的课题。
传统的波浪补偿系统一般采用液压缸或者球astern等机械装置来平衡波浪对船体或者平台的影响。
但是这些系统存在着体积大、重量重、功耗高等问题,同时在波浪波动频率发生变化时,传统的波浪补偿系统的性能也会受到一定的影响。
为了有效地解决这些问题,提高波浪补偿系统的性能和稳定性,需要对波浪补偿系统做进一步的研究和改进。
在这种背景下,一种新型的波浪补偿系统被提出并进行了研究。
这种新型波浪补偿系统结合了传统的机械方法和现代的电子控制技术,实现了波浪补偿系统的智能化和自适应性。
该系统主要由传感器、控制器、执行机构和电源等部件组成,其中传感器主要用于感知波浪的力量和频率,控制器主要用于处理传感器反馈的信息并控制执行机构进行相应的动作,执行机构主要用于实现船体或者平台的姿态调整,电源则提供系统所需的电能。
这种新型波浪补偿系统的工作原理如下:首先,传感器感知到波浪的力量和频率,然后将这些信息传输给控制器;控制器根据传感器反馈的信息计算出相应的补偿措施,然后通过电子控制技术将这些措施传输给执行机构;执行机构根据控制器的指令实现船体或者平台的姿态调整,从而抵消波浪的影响,保持系统的稳定性和舒适性。
整个过程实现了波浪对海上设施的智能化补偿,提高了系统的性能和可靠性。
相比传统的波浪补偿系统,这种新型波浪补偿系统有着以下几个优点:1.自适应性强:传统的波浪补偿系统往往只适用于特定范围内的波浪频率,当波浪频率发生变化时,系统的性能就会受到影响。
而这种新型波浪补偿系统通过电子控制技术,能够实时调整补偿措施,使得系统具有更强的自适应性,适用范围更广。
2. 体积小、重量轻:传统的波浪补偿系统一般采用液压缸或者球astern等机械装置,体积庞大且重量较重,不利于在海上设施和船只上的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1)系 统 需 要 较 大 的 饱 合 性 能 , 即 执 行 机 构 ( 液 压 系统)具有高输出能力,需要有较大功率的液压马达 来实现。 由于单个液压马达输出能力有限,设计中采 用多个马达叠加输出的方式。
(2)要求系统死区小、线性输出范围宽。 较大的死区 和非线性输出容易引起系统震荡,影响波浪补偿起重机 的稳定性。 使用不同的减速器来控制系统输出转速。
出轴上的转动惯量;B 为黏性阻力系数。 以上微分方
程经拉氏变换可写为:
Q=KQI-KCP
Q=DmθS+
Vt 4β
PS+CP
DmP=JθS2+BθS 经化简后得到液压系统的转角与输入电流之间
的关系:
ka
θ=
S2
2
Wh
Dm + 2ξ
Wh
S+1
I
式中,Wh 为液压系统固有频率;ξ 为液压系统阻尼比。 4.2 速度传感器数学模型
关键词:波浪补偿;起重机;数字控制系统;数学模型;仿真试验
Research on Optimization Design of Wave Compensation Crane
TIAN Hong-qing, LI Yan-zhang, ZHOU Jiang-tao (Institute of Logistics Techno-equip, Beijing100072, China)
能,并为方案设计提出合理建议。
4.1 伺服控制阀与液压马达的数学模型
由伺服控制阀与液压马达的基本工作原理可知,
其基本数学模型由三个流量方程来决定。
液 压 阀 流 量 基 本 方 程 :Q=KQI-KCP
液
压
马
达
流
量
方
程
:Q=Dmθ觶 -
Vt 4β
p觶 +CP
起重机的力平衡方程:DmP=Jθ咬 +Bθ觶 式中,J 为负载、减速器及液压马达折算到马达输
传感检测及物联网系统
波浪补偿起重机优化设计方法研究
田洪清,李彦章,周江涛 (海军后勤技术装备研究所, 北京 100072)
摘 要:针对主动式波浪补偿起重机设计和制造过程中容易出现的问题,提出了一种新型波浪补偿起重机的设计 方法,建立系统数学模型,并使用 Simulink 仿真工具分析控制系统的性能,提出改善系统性能的方法。
500 1000 1500 2000 2500 3000 时 间/s
图 3 二次供水温度曲线
5 结语
系统采用免疫 PID 控制器, 根据室外温度的变化和供 热实时情况在线自动调整 PID 控制器参数, 并结合变频调 速循环水压力的方法进行温度控制,具有快速、较好的鲁 棒性以及控制精度高等特点,能 很 好 地 抑 制 系 统 的 超 调 。
波浪补偿起重机的发展经过漫长的过程,从最初 的被动式波浪补偿起重机发展到主动式波浪补偿起 重机。 被动式波浪补偿起重机由简单的纯机械结构组 成,可靠性高,但需要挂接受货船,操作复杂,对接收 船也有一定要求,适用范围小。 主动式波浪起重机适 用范围宽, 对受货船要求少, 但其自身结构涉及机、 电、液一体化设计,机构较为复杂,而且补偿动力需要 由起重机自身提供, 对起重机补偿机构设计要求高, 技术难度大,国内仍处于起步研究阶段。
起重机的系统仿真模型,如图 3 所示。
4.6 系统仿真分析
为检验系统的基本性能,输入取阶跃输入,得到
波浪起重机的阶跃响应曲线,如图 4 所示,图(a)为饱
自动化应用 2014 3 期 77
传感检测及物联网系统
+ -
PID
Step
PID Controller Dead Zone
12.5 0.0014s2+0.04s+1
波浪扰动
Vi
输入速度
e
+
-
控
u
制
器
放 大
U
器
液 压
q
阀
马w 达
+
着舰
减 速 器
W
卷 V′ + 筒
速 度 Vo
测速装置
图 2 波浪补偿起重机原理
4 数学模型与仿真试验
波浪补偿起重机的设计可以通过数学模型分析、
验证,使用 Matlab 中的 Simulink 模块建立系统的基本
模型,根据系统的阶跃响应来分析其稳定性和动态性
(上接第 75 页)
节时间短。
+ -
PID
K1
+
z-d
1/Z
-
f(x)
K2
换热站 温度 控制
干拢信号
图 1 免疫 PID 控制器结构
8
6
4
2
0
-2
-4
-6
-8
0
500
1000
1500
2000
时 间/s
图 2 干扰信号
85.3
传 统 PID 85.2
免 疫 PID 85.1
85
500
84.9
84.8
84.7 0
速度传感器可简化为比例环节,其数学模型为:
Ks=
Uf vo
式 中 ,Uf 为 速 度 传 感 器 输 出 电 压 ;vo 为 接 收 船 与
补给船之间的相对速度。
4.3 数字控制器
数字控制器采用 DSP 高速数字信号处理器,接收
传感器输出的电压信号, 通过其内置的模拟-数字转
换器,将其转化为数字信号,由软件滤波器对数字信
(3) 需 要 使 用 高 速 信 号 处 理 器 来 快 速 响 应 和 处 理 系统补偿, 高速信号处理器可以实现实时的信号采 集、计算和输出。
(4)需 要 采 用 速 度 传 感 器 ,实 时 采 集 舰 船 与 货 框 之间的接近速度,并通过高速信号处理器有效地滤除 干扰信号,作为信号反馈,抑制波浪干扰,实现波浪补 偿起重机功能。
Abstract: According to the problems in design and production of active wave compensation crane, a novel design method is proposed and the mathematic model is established. The performance of the system is analyzed using Simulink tools. The method of improving the performance of the system is proposed.
(a)
(b)
(c)
(d)
图4 波浪起重机的阶跃响应
由系统响应仿真结果可以看出,经系统反馈校正
后, 波浪起重机基本上可以有效地抑制干扰信号,但 由于液压系统的死区和饱合性能,系统的响应不能完 全满足波浪补偿起重机的要求。 图(a)系统响应速度 快,稳定性好,但对液压系统的快速响应性能要求高, 饱 合 指 标 高 ;图 (b)系 统 稳 定 性 好 ,但 响 应 速 度 慢 ,难 以 满 足 波 浪 起 重 机 的 高 频 响 应 要 求 ;图 (c)系 统 稳 定 性差,因为液压系统死区高,引起波浪补偿系统振动; 图 (d)因 饱 合 参 数 低 、死 区 参 数 高 ,系 统 响 应 速 度 慢 , 采 用 提 高 PID 比 例 补 偿 系 数 的 方 法 来 提 高 响 应 速 度 后,系统产生严重的超调,失去稳定性。
78 www.ch in acaaa.co m 自动化应用
控制系统要求具有检测船体的受迫运动、实时控 制液压马达的转向和转速、检测和控制钢丝绳的拉力、 与波浪补偿系统硬件接口以及系统故障自诊断功能。
2 波浪补偿起重机的基本原理
波浪补偿起重机的基本设计如图 1 所示。 波浪补 偿马达分别安装在滑动小车与回转支承上,根据反馈 传感器信号,通过卷扬机构补偿波浪升沉运动,使得 货物的沉降及起升速度与补给船与接收船之间的相 对运动速度保持恒定。 起重马达拉动钢丝绳,控制重 物的起吊。 吊具前端安装有测量装置,测量两船之间 的相对运动速度和距离。 吊具前端配有拉力传感器和 脱钩装置,在货物吊运至接收船上方稳定后,起重马 达缓慢将货物放置于目标船,脱钩装置将自动或手动 脱开货物,完成安全吊运的全过程。 控制器用于测量 拉力传感器、测距仪的信号,并输出补偿马达、起重马 达的控制信号到放大器,从而通过电控液压阀控制波
76 www.ch in acaaa.co m 自动化应用
传感检测及物联网系统
浪补偿机构的运动。
液压系统
起重马达
补偿马达 补偿滑车
作业吊臂
吊绳
补偿马达 补给船俯仰Βιβλιοθήκη 缸数字控制器测速传感器
吊钩
货框 货物
接收船
图 1 波浪补偿起重机示意图
3 波浪补给起重机的机电控制系统模型
波浪补偿起重机系统由电子控制器、信号放大器、 测速装置、液压阀、液压马达、补偿滑车、减速器以及辅 助机械装置等组成,原理如图 2 所示。 波浪补偿装置是 由电控系统控制液压马达,拉动补偿滑车及钢丝吊绳, 实现波浪补偿的随动控制功能。 速度传感器接收并检 测接收舰船与货框之间的相对速度,即货物着舰速度, 做为反馈信号输入到信号控制器,与设定输入速度(即 目标速度)相比较,得到偏差信号,偏差信号输入控制 器,经过一定的控制算法(如 PID 控制、模糊控制、自适 应 控 制 ),输 出 控 制 信 号 ( 电 压 信 号 ), 经 由 信 号 放 大 器 输出电流信号,控制伺服阀的开度和方向,改变液压马 达的转速和转向,由减速器将扭转力矩放大,转速降低 后,输出到卷筒控制钢丝绳拉动货物着舰,从而克服波 浪扰动,实现主动式波浪补偿起重机原理。
Transfer Fcn