单片机(熊静琪)第五章部分习题答案
单片机原理与应用及C51程序设计第5章习题答案

第5章习题答案5-1 什么叫中断系统?中断系统的功能是什么?什么是中断嵌套?答:当CPU正在执行主程序时,外部或内部发生的某一事件(如某个引脚上电平的变化、一个脉冲的发生或计数器的计数溢出等)请求CPU迅速处理,CPU暂时中断当前程序的执行而转去执行相应的处理程序,待处理程序执行完毕后,CPU再继续执行原来被中断的程序,这样的过程称为中断。
功能:中断系统是为使CPU 具有对单片机外部或内部随机发生的事件进行实时处理而设置的。
中断嵌套:8051设置了两级中断优先级,低优先级中断请求不能打断高优先级的中断服务;但高优先级中断请求可以打断低优先级的中断服务,从而实现中断嵌套。
5-2 MCS-51型单片机各中断源的中断标志是如何产生的?又是如何清除的?CPU响应中断时,中断入口地址各是多少?答:见p133;.或端出现有效中断请求时,IE0 IE1)位由硬件置“1”。
当中断响应当CPU采样到IE0IE1完成转向中断服务程序时,由硬件把IE0(或IE1)清零。
TF0和TF1——计数溢出标志位,当计数器产生计数溢出时,相应的溢出标志位由硬件置“1”。
当转向中断服务时,再由硬件自动清“0”。
TI:串行发送中断标志。
CPU将数据写入发送缓冲器SBUF时就启动发送,每发送完一帧后,硬件将TI置位,必须由软件清0.RI:串行接收中断标志。
串口允许接收时,每接收完一帧后,硬件将RI置位,必须由软件清0.地址分别为:0003H,000bH0013H,001BH,0023H5-3:在MCS-51型单片机中,哪些中断标志可以在响应自动撤除。
见第二题,也可见P136;5-4答:见p136.5-5:解:PX1=1;IT1=0;PT1=0;PS=1;EA=1;ES=1;ET1=1;EX1=1;ET0=0;EX0=0;5-6解:两个,它由模式设置寄存器TMOD,中断控制寄存器IE,中断优级级寄存器IP,中断标志寄存器TCON组成5-8 请叙述TMOD=A6H所代表的含义。
单片机第五章习题部分答案
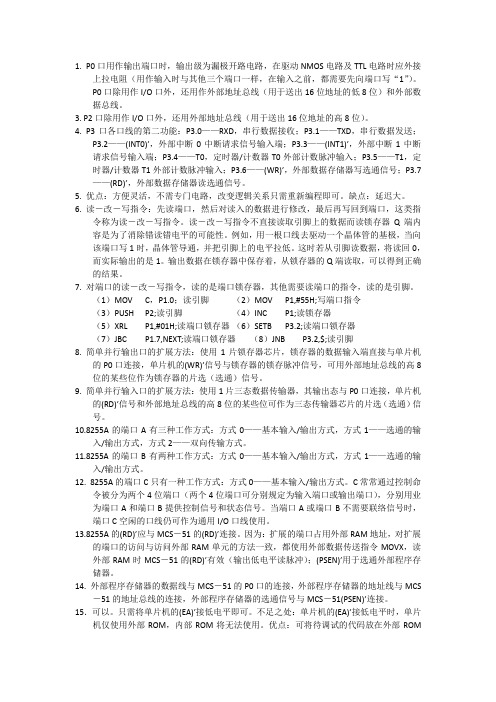
1. P0口用作输出端口时,输出级为漏极开路电路,在驱动NMOS电路及TTL电路时应外接上拉电阻(用作输入时与其他三个端口一样,在输入之前,都需要先向端口写“1”)。
P0口除用作I/O口外,还用作外部地址总线(用于送出16位地址的低8位)和外部数据总线。
3. P2口除用作I/O口外,还用外部地址总线(用于送出16位地址的高8位)。
4. P3口各口线的第二功能:P3.0——RXD,串行数据接收;P3.1——TXD,串行数据发送;P3.2——(INT0)’,外部中断0中断请求信号输入端;P3.3——(INT1)’,外部中断1中断请求信号输入端;P3.4——T0,定时器/计数器T0外部计数脉冲输入;P3.5——T1,定时器/计数器T1外部计数脉冲输入;P3.6——(WR)’,外部数据存储器写选通信号;P3.7——(RD)’,外部数据存储器读选通信号。
5. 优点:方便灵活,不需专门电路,改变逻辑关系只需重新编程即可。
缺点:延迟大。
6. 读-改-写指令:先读端口,然后对读入的数据进行修改,最后再写回到端口,这类指令称为读-改-写指令。
读-改-写指令不直接读取引脚上的数据而读锁存器Q端内容是为了消除错读错电平的可能性。
例如,用一根口线去驱动一个晶体管的基极,当向该端口写1时,晶体管导通,并把引脚上的电平拉低。
这时若从引脚读数据,将读回0,而实际输出的是1。
输出数据在锁存器中保存着,从锁存器的Q端读取,可以得到正确的结果。
7. 对端口的读-改-写指令,读的是端口锁存器,其他需要读端口的指令,读的是引脚。
(1)MOV C,P1.0;读引脚(2)MOV P1,#55H;写端口指令(3)PUSH P2;读引脚(4)INC P1;读锁存器(5)XRL P1,#01H;读端口锁存器(6)SETB P3.2;读端口锁存器(7)JBC P1.7,NEXT;读端口锁存器(8)JNB P3.2,$;读引脚8. 简单并行输出口的扩展方法:使用1片锁存器芯片,锁存器的数据输入端直接与单片机的P0口连接,单片机的(WR)’信号与锁存器的锁存脉冲信号,可用外部地址总线的高8位的某些位作为锁存器的片选(选通)信号。
单片机原理及接口技术课后习题答案(五)
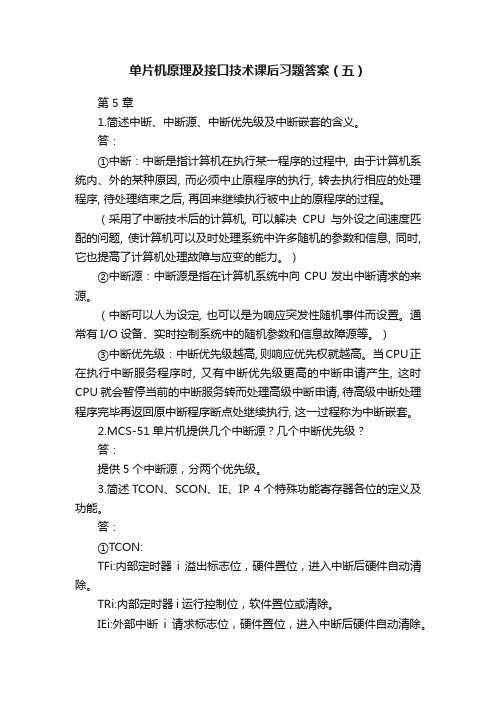
单片机原理及接口技术课后习题答案(五)第 5 章1.简述中断、中断源、中断优先级及中断嵌套的含义。
答:①中断:中断是指计算机在执行某一程序的过程中, 由于计算机系统内、外的某种原因, 而必须中止原程序的执行, 转去执行相应的处理程序, 待处理结束之后, 再回来继续执行被中止的原程序的过程。
(采用了中断技术后的计算机, 可以解决CPU与外设之间速度匹配的问题, 使计算机可以及时处理系统中许多随机的参数和信息, 同时, 它也提高了计算机处理故障与应变的能力。
)②中断源:中断源是指在计算机系统中向CPU发出中断请求的来源。
(中断可以人为设定, 也可以是为响应突发性随机事件而设置。
通常有I/O设备、实时控制系统中的随机参数和信息故障源等。
)③中断优先级:中断优先级越高, 则响应优先权就越高。
当CPU正在执行中断服务程序时, 又有中断优先级更高的中断申请产生, 这时CPU就会暂停当前的中断服务转而处理高级中断申请, 待高级中断处理程序完毕再返回原中断程序断点处继续执行, 这一过程称为中断嵌套。
2.MCS-51单片机提供几个中断源?几个中断优先级?答:提供5个中断源,分两个优先级。
3.简述TCON、SCON、IE、IP 4个特殊功能寄存器各位的定义及功能。
答:①TCON:TFi:内部定时器i溢出标志位,硬件置位,进入中断后硬件自动清除。
TRi:内部定时器i运行控制位,软件置位或清除。
IEi:外部中断i请求标志位,硬件置位,进入中断后硬件自动清除。
ITi:外部中断i类型控制位,由软件设置或清除。
ITi=1时是下降沿触发;ITi=0时是低电平触发。
(i=0、1)②SCON:TI:串行口发送中断标志位。
发送完一帧数据后,硬件置位TI,CPU响应中断后,应由软件清除TI。
RI:串行口接收中断标志位。
接收完一帧数据后,硬件置位RI,CPU响应中断后,应由软件清除RI。
③ IE:EA:中断总允许位。
EA=0,禁止一且中断,EA=1,是否允许中断由下各位定。
单片机课后习题第5 6章参考答案

第5章 AT89S51的中断系统参考答案1.答:0013H;001BH2.答:串行口中断; 外部中断13.答:RETI指令在返回的同时清除相应的优先级触发器,以允许下次中断,而RET指令则没有这个操作。
除了这一点两条指令不同外,其它操作都相同。
4.答:D5.答:在一个单一中断的系统里,AT89S51单片机对外部中断请求的响应时间总是在3~8个机器周期之间。
在下述三种情况下,AT89S51将推迟对外部中断请求的响应:(1)AT89S51正在处理同级或更高优先级的中断。
(2)所查询的机器周期不是当前正在执行指令的最后一个机器周期。
(3)正在执行的指令是RETI或是访问IE或IP的指令。
如果存在上述三种情况之一,AT89S51将丢弃中断查询结果,将推迟对外部中断请求的响应。
6.答:D7.答:PC、PC、程序存储器8.答: 参考程序段如下:SETB IT1SETB EX1SETB EA9.答:(A)10.答:一个中断源的中断请求被响应,必须满足以下必要条件:(1)总中断允许开关接通,即IE寄存器中的中断总允许位EA=1。
(2)该中断源发出中断请求,即该中断源对应的中断请求标志为“1”。
(3)该中断源的中断允许位=1,即该中断被允许。
(4)无同级或更高级中断正在被服务。
11.答:(A)、(C)、(D)12.答:参见电路如图5-10,参考程序如下:ORG 0000HLJMP MAINORG 0013HLJMP INT_EX1ORG 0030HMAIN: CLR IT0 ;采用电平触发,低电平有效中断SETB EX1 ;允许外部中断1SETB EA;插入一段用户程序WAIT: MOV PCON,#01H ;单片机进入休眠方式等待中断NOPLJMP WAIT;以下为外部中断1服务子程序INT_EX1:JB P1.2,NEXT1 ;判断是不是3号中断LJMP INT_IR3 ;跳转到3号中断处理程序NEXT1: JB P1.1,NEXT2 ;判断是不是2号中断LJMP INT_IR2 ;跳转到2号中断处理程序NEXT2: LJMP INT_IR1 ;跳转到1号中断处理程序ORG 1000HINT_IR3: 相应中断处理程序RETI ;中断返回ORG 1100HINT_IR2: 相应中断处理程序RETI ;中断返回ORG 1200HINT_IR1: 相应中断处理程序RETI ;中断返回第6章 AT89S51的定时/计数器参考答案1.答:(A)对;(B)错;(C)错;(D)错;2.答:因为机器周期:所以定时器/计数器工作方式0下,其最大定时时间为同样可以求得方式1下的最大定时时间为262.144ms ;方式2下的最大定时时间为1024ms 。
《单片机原理与应用开发技术》第五章习题答案
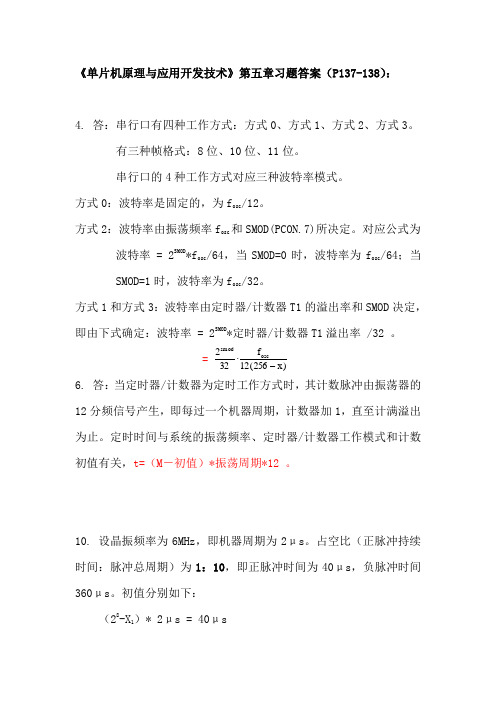
《单片机原理与应用开发技术》第五章习题答案(P137-138):4. 答:串行口有四种工作方式:方式0、方式1、方式2、方式3。
有三种帧格式:8位、10位、11位。
串行口的4种工作方式对应三种波特率模式。
方式0:波特率是固定的,为f osc /12。
方式2:波特率由振荡频率f osc 和SMOD(PCON.7)所决定。
对应公式为波特率 = 2SMOD *f osc /64,当SMOD=0时,波特率为f osc /64;当SMOD=1时,波特率为f osc /32。
方式1和方式3:波特率由定时器/计数器T1的溢出率和SMOD 决定,即由下式确定:波特率 = 2SMOD *定时器/计数器T1溢出率 /32 。
= 6. 答:当定时器/计数器为定时工作方式时,其计数脉冲由振荡器的12分频信号产生,即每过一个机器周期,计数器加1,直至计满溢出为止。
定时时间与系统的振荡频率、定时器/计数器工作模式和计数初值有关,t=(M -初值)*振荡周期*12 。
10. 设晶振频率为6MHz ,即机器周期为2μs 。
占空比(正脉冲持续时间:脉冲总周期)为1:10,即正脉冲时间为40μs ,负脉冲时间360μs 。
初值分别如下:(28-X 1)* 2μs = 40μs)x 256(12f 322osc smod-⋅X1 = 28 - 20 = 236D = 0ECH(28-X2)* 2μs = 360μsX2 = 28 - 180 = 76D = 4CH主程序:MOV TMOD,#02H;设置T0为模式2,定时方式START: MOV TH0,#0ECH;T0定时40μs初值MOV TL0,#0ECHSETB P1.0 ;P1.0置1SETB TR0 ;启动T0定时40μsLOOP1: JBC TF0,LOOP2;查询溢出标志,定时到TF0=1转移,且TF0=0 SJMP LOOP1LOOP2: CLR TR0 ;停止计数MOV TH0,#4CH ;T0定时360μs初值MOV TL0,#4CHCLR P1.0 ;P1.0清0SETB TR0 ;启动T0定时360μsLOOP3: JBC TF0,LOOP4;查询溢出标志,定时到TF0=1转移,且TF0=0 SJMP LOOP3LOOP4: CLR TR0 ;停止计数SJMP START中断方式下?如:可以设一个标志,00,01,02,,,07,00则设P1.0为高,01-07设P1.0为低。
单片机原理及应用第五章课后题答案

第五章作业答案6. 当DAC 0832 D/A转换器的CS接8031的P2.0时,程序中0832的地址指针DPDR寄存器应置为(D)。
A:0832H B;FE00H C:FEF8H D;以上三种都可以10.简述D/A转换器的主要技术指标。
解:D/A转换器的主要性能指标有:(1)分辨率:单位数字量所对应模拟量增量,即相邻两个二进制码对应的输出电压之差称为D/A转换器的分辨率。
它确定了D/A产生的最小模拟量变化,也可用最低位(LSB)表示。
(2)精度:精度是指D/A转换器的实际输出与理论值之间的误差,它是以满量程V FS 的百分数或最低有效位(LSB)的分数形式表示。
(3)线性误差:D/A转换器的实际转换特性(各数字输入值所对应的各模拟输出值之间的连线)与理想的转换特性(始、终点连线)之间是有偏差的,这个偏差就是D/A的线性误差。
即两个相邻的数字码所对应的模拟输出值(之差)与一个LSB所对应的模拟值之差。
常以LSB的分数形式表示。
(4)转换时间T S(建立时间):从D/A转换器输入的数字量发生变化开始,到其输出模拟量达到相应的稳定值所需要的时间称为转换时间。
22.具有8位分辨率的A/D转换器,当输入0~5V电压时,其最大量化误差是多少?解:对于8位A/D转换器,实际满量程电压为5V,则其量化单位1LSB=5V/256=0.0196V, 通常,A/D采用均匀量化,即每一量化层的输出都取该量化层的中值。
所以最大量化误差为(1/2)LSB,即0.0098V。
23.在一个80C51单片机与一片DAC0832组成的应用系统中,DAC0832的地址为7FFFH,输出电压为0~5V。
试画出有关逻辑电路图,并编写产生矩形波,其波形占空比为1:4,高电平为2.5V,低电平为1.25V的转换程序。
解:硬件电路连接图如图5.23所示。
图5.23 5.23题逻辑电路图DAC0832的口地址为7FFFH。
波形占空比为1:4,高电平波形时间/低电平波形时间为1/3。
单片机第五章作业答案
5.试编制一个子程序将字符串‘51 ’装入外部8000H开始的显示缓冲区。
0000H0030H: , #8000HR1, #0R0, #20LOOP: A, R1A, #5A,, A ;1B;1BR1 ;1BR0, LOOP ;3B: ‘M’,’C’,’S’,’-‘,’5’,’1’,’‘,’M’,’i’,’c’,’r’,’o’‘c’,’o’,’m’,’p’,’u’,’t’,’e’,’r’6.试设计一个n字节的无符号十进制数加法子程序,其功能为将(R0)和(R1)指出的内部中两个n字节压缩码无符号十进制数相加,结果存放于被加数单元中。
子程序入口时,R0,R1分别指向被加数和加数的低位字节,字节数n存于R2,出口时R0指向和的最高位字节,为进位位。
300000HMAIN0030HMAIN: . #60HR2,$: CLOOP: A, 0A, 1A0, AR0R1R2, LOOP8.试设计一个程序,其功能为判断(R2R3R4R5)中压缩码十进制最高位是否为零,若最高位为0,且该十进制数不为0,则通过左移使最高位不为0。
0000HMAIN0030HMAIN: A, R2A, #80HCLOOP: A, R5AR5, AA, R4AR4, AA, R3AR3, AA, R2AR2, AA, #80HLOOP: $9. 试设计一个双字节无符号整数乘法子程序,其功能为将(R3R2)和(R5R4)相乘,积存放于3033H 。
L LL×L+: R7, #04 ;结果单元清0R0, #33H: 0,#00H R7,A , R2 ;取被乘数低位字节B , R4 ;取乘数低位字节R4;R4×R2;调用乘积相加子程序A , R2;取被乘数低位字节 R2B,R5 ;取乘数高位字节R5;R5×R2R0 ;积字节指针减1;调用乘积相加子程序A,R4B,R3;R4×R3R0R0A,R5B,R3;R5×R3R0R0:A,0 ;累加子程序0,AA,BR0A,00,AR0A,0A,#00H ;加进位0,A11.试设计一个子程序,其功能为将(R0)指出的内部中6个单字节正整数按从小到大的次序重新排列。
单片机第五章答案
单片机第五章答案5-3. 现有存储容量为512K×4、1K×4、2K×8、4K×1、8KB、512KB和4MB的存储器,试问这些存储器分别有多少条地址线和数据线(设它们均为非动态RAM)?存储量地址线数据线 512K?4 1K?4 2K?8 4K?1 8KB 512KB 4MB 10 4 11 8 12 1 13 8 19 8 22 8 19 45-8 要在单片机片外扩展16KB数据存储器,选择其地址为0000~3FFFH。
如选用6264为存储器芯片,74LS138为译码器,试画出硬件的连接图。
(图中右边的6116应该改为6264)74LS138 EA P2.7 P2.6 P2.5 8031 ALE 74LS373 CE A7~A0 6264(#1) D7~D0P2.4~P2.0 RDWRA12~A8 OE WE CE A7~A0 6116(#0) D7~D0 A12~A8 OEWE C B Y0 Y1 Y2A Y3 ...P0.7~P0.05-9 要在单片机片外扩展32KB数据存储器,选择其地址为8000H~FFFFH。
如选用线选法,试设计其硬件的连接图。
+5v1kRDWRP2.7P2.6P2.5P2.4P2.3P2.2P2.1P2.0P0.7P0.6P0.5P0.4P0.3P0.2P0.1P0.0EA OEVCCCS1GNDWEcsA14A13A12A11A10A9A8D7D6D5D4D3D2D1D0GEQ7Q6Q58031A7A6A532K×8A4A3A2A1A074LS373Q4Q3Q2Q1Q05-10写出图5-43中#1~#7存储器的寻址范围,片选信号低电平有效,其中#1~#3为2KB的ROM;#4~#7为1KB的RAM.1#:8000H----87FFH 2#:8800H----8FFFH 3#:9000H----97FFH 4#:0A000H―0A3FFH 5#:0A400H---0A7FFH 6#:0A800H---0ABFFH 7#:0AC00H---0AFFFH5-11 决定8155端口地址的引脚有哪些?IO/M的作用是什么?T/IN和T/OUT的作用是什么?1. AD0~AD7(8条)三态地址/数据线控制总线(8条) I/O总线(22条)电源线(2条)2. IO/M为I/O口及存储器选择信号,若IO/M=0,则选择存储器;否则选择I/O口;T/OUT3. T/IN为定时器输入,定时器工作所需的时钟信号由此端输入。
单片机及接口技术 第五章习题答案
第五章1、什么是中断和中断系统?其主要功能是什么?答:当CPU正在处理某件事情的时候,外部发生的某一件事件请求CPU迅速去处理,于是,CPU暂时中止当前的工作,转去处理所发生的事件,中断服务处理完该事件以后,再回到原来被终止的地方,继续原来的工作。
这种过程称为中断,实现这种功能的部件称为中断系统。
功能:(1)使计算机具有实时处理能力,能对外界异步发生的事件作出及时的处理(2)完全消除了CPU在查询方式中的等待现象,大大提高了CPU的工作效率(3)实现实时控制2、试编写一段对中断系统初始化的程序,使之允许INT0,INT1,TO,串行口中断,且使T0中断为高优先级中断。
解:MOV IE,#097HMOV IP,#02H3、在单片机中,中断能实现哪些功能?答:有三种功能:分时操作,实时处理,故障处理4、89C51共有哪些中断源?对其中端请求如何进行控制?答:(1)89C51有如下中断源①:外部中断0请求,低电平有效②:外部中断1请求,低电平有效③T0:定时器、计数器0溢出中断请求④T1:定时器、计数器1溢出中断请求⑤TX/RX:串行接口中断请求(2)通过对特殊功能寄存器TCON、SCON、IE、IP的各位进行置位或复位等操作,可实现各种中断控制功能5、什么是中断优先级?中断优先处理的原则是什么?答:中断优先级是CPU相应中断的先后顺序。
原则:(1)先响应优先级高的中断请求,再响应优先级低的(2)如果一个中断请求已经被响应,同级的其它中断请求将被禁止(3)如果同级的多个请求同时出现,则CPU通过内部硬件查询电路,按查询顺序确定应该响应哪个中断请求查询顺序:外部中断0→定时器0中断→外部中断1→定时器1中断→串行接口中断6、说明外部中断请求的查询和响应过程。
答:当CPU执行主程序第K条指令,外设向CPU发出中断请求,CPU接到中断请求信号并在本条指令执行完后,中断主程序的执行并保存断点地址,然后转去响应中断。
(完整版)第五章习题答案
第五章习题5-1下面的程序运行后,(AL)=_______,CF=_______。
MOV CL, 8MOV AL, 0NOT ALROL AL, CLCMP AL, 0FFHJZ NEXTMOV AL, 0NEXT:……答:(AL)=0FFH, CF=05-2 在下面的程序段中,“DEC CX”指令执行了_______次。
MOV CX, 6JCXZ NEXTL1: DEC CXJNZ L1NEXT:……(A) 0(B) 5(C) 6(D) 7答:C5-3 设有单字节有符号数X,Y与Z,如果X+Y>200,则求X-Z,否则求X+Z,运算结果存储在SUM字单元中。
DATA SEGMENTX DB 120Y DB 100Z DB 20SUM DB 0DATA ENDSSTACK1 SEGMENT STACKDB 20H(?)STACK1 ENDSCODE SEGMENTASSUME CS:CODE, DS:DATA, SS:STACK1BEGIN: MOV AX, DATAMOV DS, AXXOR AH, AHMOV AL, XXOR BH, BHMOV BL, YADD AX, BX//注意这里用的是16位的寄存器,想想原因?CMP AX, 200MOV AL, XJG SUB0;判断ADD AL, ZJMP END0SUB0:SUB AL, ZEND0:XOR AH,AHMOV SUM, AXMOV AH,4CHINT 21HCODE ENDSEND BEGIN5-4 下面的程序段执行后,BUF1的前5个字节单元内容分别是多少?DATA SEGMENTDA1DW123H, 456H, 0AB00HDA2DB12H, 34H, 56H, 0ABHDB$-DA2BUF1DB10H D UP(1,2,3)BUF2DB10H, 20H, 30HDATA ENDS……MOV SI, OFFSET DA1MOV DI, OFFSET BUF1MOV CX, 5LOP: MOV AL, [SI]MOV[DI], ALINC SIINC DILOOP LOP……答:5-5 阅读下列程序,回答下列问题:(1) 该程序完成什么功能?(2) 程序中的“INC SI”可否用指令“ADD SI, 1”代替,为什么?(3) 程序中的指令LEA SI, DATA1可用指令________代替。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.设采样离散控制系统如图所示,已知a=1,K=1,T=1S,输入单位阶跃信号,试分析系统的过渡过程。
解:
离散系统的传递函数
a=1; K=1 ;T=1;
num=[K];
den=conv([1 0],[1 a]);
[num2 den2]=c2dm(num,den,T);
G0z=tf(num2,den2,T);
Gz=feedback(G0z,1)
结果:
Transfer function:
0.3679 z + 0.2642
-----------------
z^2 - z + 0.6321
Sampling time: 1
单位输入响应下的输出图像:
num3=[0.3679 0.2642];
den3=[1 -1 0.6321];
dstep(num3,den3)
axis([0 35 -0.1 1.5])
结果:
由图像可知,在单位阶跃信号的作用下,调整时间ts约为12s,超调量为40%,峰值时间tp=3s,振荡次数N=1.5,衰减比为2:1,稳态误差ess=0.
2.设采样离散控制系统如图所示,已知a=1,K=1,T=1S,输入单位阶跃信号、单位速度、单位加速度时的稳态误差。
解:
离散系统的传递函数:
a=1; K=1 ;T=1;
num=[K];
den=conv([1 0],[1 a]);
[num2 den2]=c2dm(num,den,T);
G0z=tf(num2,den2,T);
Gz=feedback(G0z,1)
结果:
Transfer function:
0.3679 z + 0.2642
-----------------
z^2 - z + 0.6321
Sampling time: 1
三种输入下的稳态误差:
syms z GZ Kp Kv Ka ess1 ess2 ess3
Gz=factor((0.3679*z+0.2642)/(z^2-1.368*z+0.3679));
Kp=limit(Gz,z,1);
ess1=1/(1+Kp)
Kv=limit((z-1)*Gz,z,1);
ess2=1/Kv
Ka=limit((z-1)^2*Gz,z,1);
ess3=1/Ka
结果:
ess1 =
-1/6320
ess2 =
Inf
ess3 =
Inf
3.已知采样离散系统的方程如下,是判断系统的稳定性。
(1)D(Z)=Z^Z-Z+0.632
解:
syms den p i n
den=[1 -1 0.632];
p=roots(den)
i=find(abs(p)>1);
n=length(i);
if n>0
disp('system is not stable')
else
disp('system is stable')
end
结果:
P =
0.5000 + 0.6181i
0.5000 - 0.6181i
system is stable
4.设采样离散控制系统如图所示,已知a=1,试求T=1s是,T=0.5两种采样周期下,保证系
统稳定的放大系数的取值范围,另外说明采样保持器对系统稳定性的影响。
解:
当K=1时两种采样周期的闭环传递函数:
syms T i
num=1;
den=conv([1 0],[1 1]);
for i=[1 2]
if i<2
T=1;
else
T=0.5;
end
[num2 den2]=c2dm(num,den,T);
G0z=tf(num2,den2,T);
Gz=feedback(G0z,1)
end
结果:
Transfer function:
0.3679 z + 0.2642
-----------------
z^2 - z + 0.6321
Sampling time: 1
Transfer function:
0.1065 z + 0.0902
--------------------
z^2 - 1.5 z + 0.6967
Sampling time: 0.5
根轨迹图:
syms T i
num=1;
den=conv([1 0],[1 1]);
for i=[1 2]
if i<2
T=1;
else
T=0.5;
end
[num2 den2]=c2dm(num,den,T);
G0z=tf(num2,den2,T);
Gz=feedback(G0z,1)
end
num1=[0.3679 0.2642];den1=[1 -1 0.6321];
num2=[0.1065 0.0902];den2=[1 -1.5 0.6967];
for i=[1 2]
if i<2
num=num1;den=den1;
else
num=num2;den=den2;
end
[k,poles]= rlocfind(num,den)
title('¸ù¹ì¼£Í¼')
hold on
p=0:0.07:2*pi
x=sin(p)
y=cos(p)
plot(x,y,'g-')
end
由图像可得:
采样周期T增大,临界增益K 降低。
5.设采样离散控制系统如图所示,已知a=1,K=1,T=1S,试绘制系统的开环对数频率特性,并判断系统的稳定裕度。
解:
系统开环传递函数及伯德图:
a=1; K=1 ;T=1;
num=[K];
den=conv([1 0],[1 a]);
[num2 den2]=c2dm(num,den,T);
G0z=tf(num2,den2,T)
margin(G0z)
结果:
Transfer function:
0.3679 z + 0.2642
----------------------
z^2 - 1.368 z + 0.3679 Sampling time: 1
由图象可得:
幅值裕度为7.58dB,相角裕度为30.4度。