VBOX_ADAS_速度与距离的测量
ADAS设备操作规程

ADAS设备操作规程主车配置图1: Racelogic ADAS主车硬件配置目标车配置图2:Racelogic ADAS目标车硬件配置1、两车分离模式(适合AEB/FCW/ACC/BSD测试)按照图1、2连接好设备目标车1.连接VBOX文件管理器到目标车上的VBOX2.进入设置3.选择VBOX选项4.选择记录频率并且设置为100Hz,然后选择BACK返返回VBOX设置菜单下5.选择KALMAN FILTER确保都未勾选,返回VBOX设置菜单6.选择DYNAMICS设置为NORMAL,这个模式最适合ADAS测试,返回VBOX设置菜单7.选择DGPS设置到基站的2cm模式,返回VBOX设置。
8.选择DGPS RS232到适合radio的速率,返返回VBOX设置9.返返回主设置菜单并选择ADAS选项。
10.选择SINGLE TARGET模式并勾选 TARGET VEHICLE 1,返回ADAS设置主车1.连接VBOX文件管理器到主车上的VBOX2.重复目标车部分的步骤2-93.选择SINGLE TARGET模式并勾选SUBJECT VEHICLE,返回ADAS设置RTK DGPS设置固定基站确保2个VBOX单元都处于RTK锁定的DGPS状态,以下2个指示:∙VBOX前面板的‘DIFF’ LED灯绿灯,如图3(注意:最新版的VB3ISLR DIFF灯在右下角)∙ VBOX Tools软件的Solution Type通道显示‘RTK Fixed,如图4’图3:VBOX DGPS状态指示图4:VBOXTools中 RTK锁定移动基站步骤7和8改变了目标车7. 选择DGPS并设置DGPS模式到MB BASE,返返回VBOX设置8. 选择DGPS RS232 RATE并确保勾选115200,返回VBOX设置主车步骤7和8调整为:7. 选择DGPS并且设置DGPS模式到MB ROVER,返回VBOX设置8. 选择DGPS RS232 Rate并确保是115200,返返回VBOX设置。
现代汽车的四种测距方法

现代汽车的四种测距方法
现代汽车使用多种测距方法来实现距离感知和安全辅助系统。
以下是四种常见的测距方法:
1. 超声波测距:超声波传感器广泛应用于汽车的倒车雷达和泊车辅助系统中。
超声波传感器发射超声波信号,并通过检测信号的反射时间来计算物体与车辆之间的距离。
超声波测距主要适用于近距离测量,常见于低速行驶和倒车时。
2. 毫米波雷达测距:毫米波雷达是一种使用毫米波频段进行测距的技术。
它可以测量车辆周围的物体距离和速度。
毫米波雷达可以在更大范围内进行高精度的距离测量,广泛应用于自适应巡航控制(ACC)、自动紧急制动系统(AEB)等高级驾驶辅助系统。
3. 激光雷达测距:激光雷达(Lidar)利用激光束测量物体与车辆之间的距离。
它通过发送激光脉冲并测量其返回时间来计算距离。
激光雷达可以提供高精度的三维距离测量和环境感知,被广泛应用于自动驾驶技术中。
4. 相机视觉测距:相机视觉系统利用摄像头和图像处理算法来测量物体与车辆之间的距离。
通过分析图像中的物体大小、形状和透视关系等信息,结合车辆的运动和相机的参数,可以推断出距离信息。
相机视觉测距常用于车道保持辅助系统(LKA)、前方碰撞预警系统(FCW)等应用。
这些测距方法通常会结合使用,以提供更全面和准确的环境感知和安全辅助功能。
汽车制造商会根据具体的应用需求和成本考虑选择合适的测距技术。
高级驾驶辅助系统ADAS各功能详解
A D A S(高级驾驶辅助系统)高级驾驶辅助系统(Advanced Driver Assistant System),简称ADAS,是利用安装于车上的各式各样的传感器,在第一时间收集车内外的环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险,以引起注意和提高安全性的主动安全技术。
ADAS 采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量,通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。
早期的ADAS 技术主要以被动式报警为主,当车辆检测到潜在危险时,会发出警报提醒驾车者注意异常的车辆或道路情况。
对于最新的ADAS 技术来说,主动式干预也很常见。
ADAS通常包括以下17种用与汽车驾驶辅助的系统:1、导航:导航是一个研究领域,重点是监测和控制工艺或车辆从一个地方移动到另一个地方的过程。
导航领域包括四个一般类别:陆地导航,海洋导航,航空导航和空间导航。
2、时交通系统TMC:TMC是是欧洲的辅助GPS导航的功能系统。
它是通过RDS方式发送实时交通信息和天气状况的一种开放式数据应用。
借助于具有TMC功能的导航系统,数据信息可以被接收并解码,然后以用户语言或可视化的方式将和当前旅行路线相关的信息展现给驾驶者。
3、电子警察系统ISA:我国道路交通管理系统中的“电子警察”是随着科技的发展而产生的,是一个时代的产物。
它作为现代道路交通安全管理的有效手段,可以迅速地监控、抓拍、处理交通违章事件,迅速地获取违章证据,提供行之有效的监测手段,为改善城市交通拥堵现象起到了重要的作用,已成为道路交通管理队伍中必不可少的一员,以充分发挥它准确、公正的执法作用。
4、车联网(Internet of Vehicles):车联网是由车辆位置、速度和路线等信息构成的巨大交互网络。
通过GPS、RFID、传感器、摄像头图像处理等装置,车辆可以完成自身环境和状态信息的采集;通过互联网技术,所有的车辆可以将自身的各种信息传输汇聚到中央处理器;通过计算机技术,这些大量车辆的信息可以被分析和处理,从而计算出不同车辆的最佳路线、及时汇报路况和安排信号灯周期5、自适应巡航ACC(Adaptivecruise control):自适应巡航控制系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。
VBOX3iSL-ADAS-VCI的DBC文件参数说明

VBOX3iSL-ADAS-VCI的DBC文件参数说明VBOX_8Latitude_48bit 纬度48位数单位度VBOX_9Longitude_48bit 经度48位数单位度VBOX_7Roll_Angle 侧倾角单位度Yaw_Rate 横摆角速率单位度/sLong_Velocity_mph 纵向速度单位mphLong_Velocity_kmh 纵向速度单位kmhLat_Velocity_mph 横向速度单位mphLat_Velocity_kmh 横向速度单位kmhVBOX_6Pitch_Angle 俯仰角单位度Slip_Angle 侧滑角单位度True_Heading 真航角,双天线测试功能测量的航向角单位度Vel_Quality 速度质量用来判断信号好坏VBOX_5Trig_Vel_Mph 触发速度单位MphTrig_Vel_Kmh 触发速度单位KmhTrig_time 触发时间单位秒Distance 距离VBOX_4Lateral_acceleration 横向加速度单位gLongitudinal_acceleration 纵向加速度单位gTrig_Dist 触发距离单位mVBOX_3DGPS 差分GPS状态Brake_trigger 刹车触发Vertical_Velocity 垂直速度单位KmhAltitude_WGS84 海拔高度单位mLogging 记录状态VBOX_2Velocity_mph 速度单位mphHeading 航向角单位度Velocity_kmh 速度单位kmhLongitude 经度单位度VBOX_1Latitude 纬度单位度Time_Since_Midnight 时间(从午夜零点开始计时)Sats 卫星数Slip_1Slip_FL 左前轮的侧滑角单位度Slip_FR 右前轮的侧滑角单位度Slip_RL 左后轮的侧滑角单位度Slip_RR 右后轮的侧滑角单位度Slip_2Slip_COG 重心的侧滑角单位度ADAS的参数含义请参考以下的命名规则ADAS_VCI_T1_1Range_tg1 主车和目标车1的距离单位mRelSpd_tg1 主车和目标车1的相对速度单位km/hADAS_VCI_T1_2LngRsv_tg1 以主车航向角为基准的主车与目标车1之间的纵向距离单位m LatRsv_tg1 以主车航向角为基准的主车与目标车1之间的横向距离单位mADAS_VCI_T1_3LngSsv_tg1 : km/h 以主车航向为基准,主车和目标车1的纵向速度差单位km/h LatSsv_tg1 : km/h 以主车航向为基准,主车和目标车1的横向速度差单位km/hADAS_VCI_T1_4Angle_tg1 : Deg 主车航向角到目标车1航向角的夹角单位度Status_tg1 : RTK 目标车VBOX的DGPS状态LKTime_tg1 : Seconds 2.4Ghz无线连接的时间,用于指示2 车之间无线连接质量单位秒ADAS_VCI_T1_5LngRtg_tg1 : Metres 目标车1航向角下测量的主车和目标车之间的纵向距离单位m LatRtg_tg1 : Metres 目标车1航向角下测量的主车和目标车之间的横向距离单位mADAS_VCI_T1_6:T2Csv_tg1 从LngRsv-tg1和LngSsv–tg1通道计算出的距离碰撞的时间单位秒Status_sv : RTK 主车VBOX 的DGPS状态Yawdif_tg1 : Deg 主车和目标车1航向角的差别单位度ADAS_VCI_T1_7:Spd_tg1 : km/h 目标车1的车速单位km/hT2C2sv_tg1 : Seconds 从LngRsv-tg1, LngSsv-tg1和Accel-tg1通道计算出的距离减速目标车1碰撞的时间单位秒ADAS_VCI_T1_8:LatRreftg1 : Metres 以测试跑道航向角为基准2 车的横向距离单位mAccel_tg1 : g 由目标车1速度和时间得出的目标车1减速度单位mADAS_VCI_T1_9:SepTim_tg1 : Seconds 主车以当前速度超越间隔距离的时间单位秒T2Ctg_tg1 : Seconds 距离与目标车1碰撞的时间,由LngRtg-tg1 和与目标车纵向速度算得单位秒ADAS_VCI_T1_10:Latdif_tg1 : Minutes 主车和目标车1纬度差异单位分Lngdif_tg1 : Minutes 主车和目标车1经度差异单位分ADAS_VCI_T1_11:YawRat_tg1 : Deg/s 目标车1横摆角速度,只有目标车上VBOX 连接了IMU 此通道才有用ADAS_VCI_T2_1:RelSpd_tg2 : km/h 主车和目标车2的相对速度Range_tg2 : Metres 主车和目标车2的距离单位mADAS_VCI_T2_10:Lngdif_tg2 : Minutes 主车和目标车2纬度差异单位分Latdif_tg2 : Minutes 主车和目标车2经度差异单位分ADAS_VCI_T2_9:SepTim_tg2 : Seconds 主车以当前速度超越间隔距离的时间单位秒T2Ctg_tg2 : Seconds 距离与目标车2碰撞的时间,由LngRtg-tg2和与目标车纵向速度算得单位秒ADAS_VCI_T2_8:LatRreftg2 : Metres 以测试跑道航向角为基准2 车的横向距离单位mAccel_tg2 : g 由目标车2速度和时间得出的目标车2减速度单位mADAS_VCI_T2_7:T2C2sv_tg2 : Seconds 从LngRsv-tg2, LngSsv-tg2和Accel-tg2通道计算出的距离减速目标车1碰撞的时间单位秒Spd_tg2 : km/h 目标车的车速单位km/hADAS_VCI_T2_6:T2Csv_tg2 : Seconds 从LngRsv-tg2和LngSsv–tg2通道计算出的距离碰撞的时间单位秒Yawdif_tg2 : Deg 主车和目标车2航向角的差别单位度Status_sv : RTK 主车VBOX 的DGPS状态ADAS_VCI_T2_5:LngRtg_tg2 : Metres 目标车2航向角下测量的主车和目标车2之间的纵向距离单位m LatRtg_tg2 : Metres 目标车2航向角下测量的主车和目标车2之间的横向距离单位mADAS_VCI_T2_4:LKTime_tg2 : Seconds 2.4Ghz无线连接的时间,用于指示2 车之间无线连接质量单位秒Angle_tg2 : Deg 主车航向角到目标车2航向角的夹角单位度Status_tg2 : RTK 目标车2VBOX 的DGPS状态ADAS_VCI_T2_3:LatSsv_tg2 : km/h 以主车航向为基准,主车和目标车2的横向速度差单位km/h LngSsv_tg2 : km/h 以主车航向为基准,主车和目标车2的纵向速度差单位km/hADAS_VCI_T2_2:LngRsv_tg2 : Metres 以主车航向角为基准的主车与目标车2之间的纵向距离单位m LatRsv_tg2 : Metres 以主车航向角为基准的主车与目标车之间的横向距离单位mADAS_VCI_T2_11:YawRat_tg2 : Deg/s 目标车2横摆角速度,只有目标车上VBOX 连接了IMU 此通道才有用单位度/s。
车速表的检测方法

车速表的检测方法
车速表的检测方法包括以下步骤:
1.检查系统所有看得见的部分有无异常,检查导线是否剥落,真空软管是
否损坏。
所有软管均应分路正确,连接牢靠。
2.车速表软线同样必须正确安置,不得过度弯曲或绞缠在一起。
接头要牢
靠。
3.伺服机构(即节流促动器)及拉杆应平顺工作。
4.牵动链条的空行程不得大于1/4英寸。
5.电气接头必须完整牢固。
6.导线束必须整齐不素。
检查有无绝缘剥落,接头是否松动或短路。
在继
续进行其它检查之前应做上述必要的纠正。
此外,车速表的检测方法还包括以下几种:
1.使用高精度的测速仪和数据采集系统来进行车速的精确测量。
2.通过GPS导航系统来精确计算车辆的速度。
3.利用雷达或激光测速器来估算速度。
4.通过应用智能手机的内置传感器,结合特定应用程序来估算速度。
以上信息仅供参考,建议咨询专业人士获取更准确的信息。
基于VBOX设备的车道偏离预警系统性能一致性验证方法
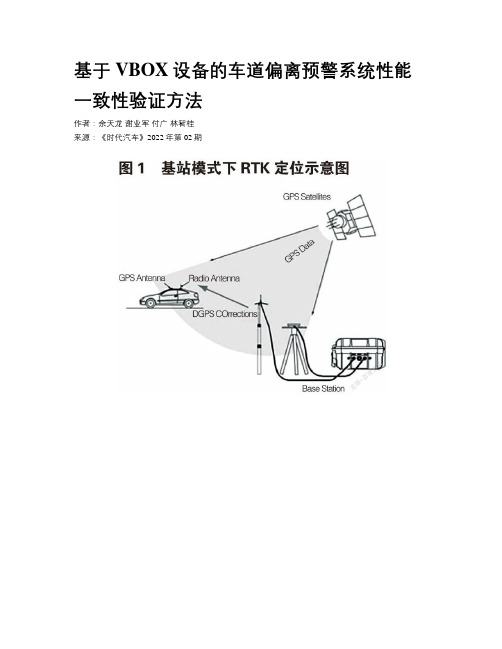
基于VBOX设备的车道偏离预警系统性能一致性验证方法作者:余天龙谢业军付广林智桂来源:《时代汽车》2022年第02期摘要:为解决目前车道偏离预警系统性能只能通过驾驶员主观感受去评价、难以通过客观数据去验证其性能一致性等难题,利用VBOX设备的定位及车道线勘测功能,获取车辆车道偏离预警系统触发时车辆与车道线的距离值,通过数据分析软件Origin对获取的多组数据进行统计分析,经过试验与分析验证,成功验证该车的车道偏离预警功能一致性较好。
结果表明,本文提出的车道偏离预警性能一致性验证方法可行。
關键词:车道偏离预警系统 VBOX设备一致性Abstract: In order to solve the problems faced by the current lane departure warning system performance, which can only be evaluated by driver's subjective feeling, and is difficult to through the objective data to verify its performance consistency, the article uses the VBOX equipment positioning and lane line survey, obtains vehicles lane departure warning system when the trigger and the lane line distance, through the data analysis software origin to obtain multiple sets of data for statistical analysis. And through the test and analysis verification, the article finds out that the successful consistency checking the car lane departure warning function is better. Results show that the proposed lane departure warning performance consistency validation method is feasible.Key words:lane departure warning system, The VBOX equipment, consistency1 引言随着人们生活水平的不断提升,人们对于日常出行的要求越来越高,出行安全性与便捷性逐渐成为人们的重点关注对象,进而衍生出了目前汽车领域火热的智能驾驶辅助技术,车道偏离预警系统便是其中之一,车道偏离预警系统通过车载摄像头采集道路图像来识别车道线信息,并实时计算车辆与所在车道相对位置关系和运动趋势,在超过某个安全区域阈值后警示驾驶员偏离车道的行为[1],此系统对于行车安全起到极大辅助作用。
VBOX操作手册(张晓明)

使用手册动力性经济性测试仪(VBOXⅡ系统)奇瑞公司试验技术中心整车试验部动力性经济性科前言本使用手册是根据VBOX软件操作手册、VBOX整车性能测试系统、油耗仪说明书及与实际操作时所常用到的知识进行总结。
目录第一部分:仪器的主要组成部分介绍及仪器连接;第二部分:仪器常用软件设置;第三部分:试验数据处理。
第四部分:实际操作注意事项。
第一部分:仪器的主要组成部分介绍及仪器连接1.VBOX主机130mm前面LED 解释电源ok卫星计数开始计数CF卡CAN Bus/DGPS绿色的LED(ST)用来表示当前锁定的卫星的数量。
如果黄色的LED(SC) 闪烁,而绿色的(ST)LED灯灭了,说明VBOX 没有锁定任何卫星,无法完成测试。
如果出现了这种情况,检查GPS 天线是否正确与VBOX 相连接,再检查天线是不是对天空有一个很好的视野,没有被物体遮住。
VBOX 通常在接通电源30秒钟之内可以完成对卫星的锁定。
然而在第一次使用的时候要花上20分钟的时间才能完成这项工作。
黄色LED(SC) 闪烁表示开始计数卫星的数量。
当卫星锁定时,在黄灯闪烁之间绿色LED灯闪烁的次数表示锁定卫星的数量。
当CF存储卡插入VBOX II中时,蓝色LED(CF) 将闪烁表示VBOX正写入存储设备内。
琥珀色LED 用来表示或者CAN总线激活(CN)或该设备带DGPS(DG) 功能,如果DGPS锁定成功的话,该LED亮。
2.频率输入模块这是四个通道的频率输入模块注:1 (CAN /电源输入);2 (CAN 输出);3 (RS232 串行接口)3.显示器4.显示器固定装置(吸盘)5.电源该变压器可以将220V电压变为12V的电压,可以直接接到设备上,也可以对充电电池充电。
6.充电电池(电池组)可以为VBOX系统提供电源。
7.电源线①②注:①接VBOX主机1 POWER; ②接点烟器,为VBOX系统提供电源。
8.数据线①②注:①接VBOX主机5 RS232; ②接笔记本COM口。
ADAS测试之vbox

▪ 动态测试 ▪ ADAS 测试 ▪ 耐久性测试 ▪ 高风险的测试
Hale Waihona Puke ABD机器人-行人目标▪ 兼容ABD机器人和 4A的行人系统.
▪ 适用于Euro NCAP 测试.
ABD机器人 – 目标引导
▪ 兼容奥地利DSD公司的行 人和引导目标车-UFO.
新软件 VBOX Test Suite
▪ 允许两车的驾驶员实时查看两车的分离参 数.
▪ 可通过CAN总线来时使用油门和制动踏板 机器人.
▪ 兼容VBOX3iSL RTK. ▪ 最适用于FCW标准测试.
ABD机器人
▪ 油门和制动踏板机器人比 人有着更高的效率和一致 性.
ABD机器人
▪ 使用VB3iSLR带RTK DGPS的双天线模式 和ABD的转向机器人可执行路径跟随控制
Racelogic VBOX ADAS 测试
原理
▪ 位置差异 ▪ 相对位置的高精度测量
GPS定位精度
•GPS only 3m •SBAS DGPS 1m •RTCM DGPS 40cm •Csi DGPS 20cm •RTK DGPS 2cm
利用实时的动态 DGPS来获得高精 度的GPS定位
GPS + GLONASS
ADAS应用
• 自适应巡航控制 • 自动紧急制动 • 自动主光束控制 • 盲点监测 • 车道偏离预警 • 后方交叉路径探测 • 碰撞缓冲
自适应巡航控制
• ISO 15622 • 主/目标车速度 • 间隔时间 (s) • 间隔距离 (m) • 横向距离 (m)
AEB /碰撞缓冲
• 到碰撞的时间
• 纵向/横向距离 • 主/目标车速度 • 油门和制动机器人
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高级驾驶辅助系统
• 自适应巡航控制 • 自动紧急制动 • 自动主光束控制 • 盲点监测 • 车道偏离预警 • 后方交叉路径探测 • 碰撞缓冲
高级驾驶辅助系统
• 2cm位置精度 • 100Hz 采样率 • 低延时
• 同步视频
• 通过CAN或者数字/模 拟信号输入来获取车 辆预警信号
自适应巡航控制
• ISO 15622 • 主/目标车速度 • 间隔时间 (s) • 间隔距离 (m) • 横向距离 (m)
AEB /碰撞缓冲
• 到碰撞的时间 • 纵向/横向距离 • 主/SO 17361 • 到车道线的距离 • 偏离车道线的速度 • 与车道线的角度
盲点监测
• 车辆速度 • 纵向/横向距离 • 平面网格覆盖