西门子12001500PLC用触摸屏按钮触发启动PID的自整定编写方法程序示例
西门子PLC的PID控制器参数整定方法
书山有路勤为径;学海无涯苦作舟
西门子PLC的PID控制器参数整定方法
【中国技术前沿】PID控制器的参数整定是控制系统设计的核心内容。
它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时
间的大小。
西门子PLCPID控制器参数整定的方法很多,概括起来有两大类:一是
理论计算整定法。
它主要是依据系统的数学模型,经过理论计算确定控制
器参数。
二是工程整定方法,它主要依赖工程经验,直接在控制系统的试
验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。
PID控制器参数的工程整定方法,一般采用的是临界比例法。
利用该方
法进行PID控制器参数的整定步骤如下:(1)首先预选择一个足够短的采
样周期让系统工作;(2)仅加入比例控制环节,直到系统对输入的阶跃响
应出现临界振荡,记下这时的比例放大系数和临界振荡周期;(3)在一定
的控制度下通过公式计算得到PID控制器的参数。
PID参数的设定:是靠经验及工艺的熟悉,参考测量值跟踪与设定值曲线,从而调整P\I\D的大小。
比例I/微分D=2,具体值可根据仪表定,再
调整比例带P,P过头,到达稳定的时间长,P太短,会震荡,永远也打不到设定要求。
PID控制器参数的工程整定,各种调节系统中P.I.D参数经验数据以下可参照:
专注下一代成长,为了孩子。
西门子博途S7-1200PLC编程之PID控制实例(4)

组态 PID 控制器【简介】以下步骤将介绍如何使用工艺对象“PID_Compact”组态 PID 控制器。
PID 控制器组态的设置● 控制器类型控制器类型用于预先选择需控制值的单位。
在本例中,将单位为“°C”的“温度”(Temperature) 用作控制器类型。
● 输入/输出参数在该区域中,为设定值、实际值和工艺对象“PID_Compact”的受控变量提供输入和输出参数。
要在没有其它硬件的情况下使用PID控制器,请将“PID_Compact”的输入和输出参数链接到与仿真块“PROC_C”互连的“output_value”和“temperature”变量:– 实际值由“PROC_C”仿真并用作“PID_Compact”的输入。
在本例中,实际值为映射到“temperature”变量中的加热室中的测量温度。
– 受控变量由工艺对象“PID_Compact”计算,是该块的输出参数。
受控变量映射在“out put_value”变量中并用作“PROC_C”的输入值。
下图显示了工艺对象“PID_Compact”和仿真块“PROC_C”的互连方式。
【要求】● 循环中断 OB“PID [OB200]”处于打开状态。
● 已在组织块“PID [OB200]”中调用了“PID_Compact”块。
● 已在组织块“PID [OB200]”中调用了“PROC_C”仿真块。
【步骤】要组态工艺对象“'PID_Compact”并将其与仿真块“PROC_C”互连,请按以下步骤操作: 1. 在巡视窗口中打开 PID 控制器的组态。
2. 选择控制器的类型。
3. 输入控制器的设定值。
4. 分别为实际值和受控变量选择“输入”(input)和“输出”(output)。
从而指定将使用用户程序的某个变量中的值。
说明Input(_PER) -Output(_PER)使用输入和输出为输入或输出参数提供用户程序的实际值。
使用Input_PER 和Output_PER可将模拟量输入用作实际值或将模拟量输出用作受控值输出。
PID参数自整定的方法及实现

PID参数自整定的方法及实现近年来出现的各种智能型数字显示调节仪,一般都具有PID参数自整定功能。
仪表在初次使用时,可通过自整定确定系统的最佳P、I、D调节参数,实现理想的调节控制。
在自整定启动前,因为系统在不同设定值下整定的参数值不完全相同,应先将仪表的设定值设置在要控制的数值(如果水电站或是中间值)上。
在启动自整定后,仪表强制系统产生扰动,经过2~3个振荡周期后结束自整定状态。
仪表通过检测系统从超调恢复到稳态(测量值与设定值一致)的过度特性,分析振荡的周期、幅度及波形来计算仪表的最佳调节参数。
理想的调节效果是,设定值应与测量值保持一致,可从动态(设定值变化或扰动)合稳态(设定值固定)两个方面来评价系统调节品质,通过PID参数自整定,能够满足大多数的系统。
不同的系统由于惯性不同,自整定时间有所不同,从几分钟到几小时不等。
我单位有一台DYJ-36-2型油加热器。
该油加热器是由加热炉体、载体传输通道、膨胀系统及电控装置构成,与用热设备组成了一个循环加热系统。
热载体(导热油)在炉体内被电热管加热后,用热油泵通过管路传送到用热设备,放热后再次回到炉体内升温,实现连续循环过程。
控制油温的调节仪表时日本SHIMADEN(岛电)公司的SR73型PID自整定温控仪。
温度控制系统为闭环负反馈系统。
由热电偶检测的油温信号对应的mV信号,传送至调节仪的信号输入端,调节仪输出DC15V、20mV的高电平信号,传送至SSR固态继电器,驱动晶闸管过零触发开关电路,改变固定期内的输出占空比,从而控制电热器的输出功率。
在系统投入运行前,我们对调节仪进行PID参数的自整定工作。
首先把它的设定值(SV)调至工艺常用温度90℃。
仪表提供了一组PID参数:比例带P=0.1%~999.9%积分时间I=1~6000s微分时间D=0~3600s再进入功能彩旦,把P、I、D参数分别按经验值设定为:P=3.0;I=120;D=30;超调抑制系数SF=0.4。
plc自己编写pid案例

plc自己编写pid案例在工业自动化控制领域,PID控制器是一种常见的控制方式,它可以通过对系统的反馈信号进行比例、积分和微分运算,来实现对系统的稳定控制。
在PLC编程中,我们经常需要编写PID控制的程序来实现对温度、压力、流量等参数的精确控制。
下面,我将以一个温度控制的案例来介绍如何在PLC中编写PID控制程序。
首先,我们需要明确PID控制器的工作原理。
PID控制器根据系统的误差信号,分别进行比例、积分和微分运算,然后将这三个部分的输出相加,得到最终的控制量。
比例部分决定了控制量与误差的线性关系,积分部分可以消除稳态误差,微分部分可以抑制系统的振荡。
在PLC编程中,我们可以利用PID指令来实现PID控制。
首先,我们需要定义输入输出变量,比如温度传感器的输入变量和加热元件的输出变量。
然后,我们需要设置PID控制器的参数,包括比例系数、积分时间、微分时间等。
接下来,我们可以使用PID指令来进行PID计算,并将计算结果输出到加热元件,从而实现对温度的精确控制。
下面,我将以一个温度控制的案例来具体介绍如何在PLC中编写PID控制程序。
假设我们需要控制一个恒温箱的温度,使其保持在设定的目标温度。
首先,我们需要接入一个温度传感器,将传感器的输出信号作为PID控制器的输入。
然后,我们需要接入一个加热元件,将PID控制器的输出信号作为加热元件的控制信号。
接下来,我们需要在PLC中定义温度传感器的输入变量和加热元件的输出变量,并设置PID控制器的参数,比如比例系数为0.1、积分时间为10秒、微分时间为5秒。
最后,我们可以使用PID指令来进行PID计算,并将计算结果输出到加热元件,从而实现对恒温箱温度的精确控制。
在实际编写PID控制程序时,我们需要注意以下几点。
首先,需要根据实际系统的特性来调整PID控制器的参数,比如根据系统的惯性和时间常数来确定积分时间和微分时间。
其次,需要考虑系统的稳定性和抗干扰能力,可以通过合理设置PID参数和添加滤波器来提高系统的性能。
新手请收藏,超详细的西门子触摸屏设置与编程图文教程
新手请收藏,超详细的西门子触摸屏设置与编程图文教程大家好,欢迎关注电气技术微课堂!前几天发布了一个西门子TP-700触摸屏的使用视频,有的朋友反映视频画面不是很清晰,对于触摸屏的变量设置环节看不清楚,所以我特别整理了一个图文版的触摸屏设置教程,有需要的朋友请收下。
控制要求:在触摸屏上点击启动按钮SB1,指示灯点亮,点击停止按钮SB2,指示灯熄灭。
触摸屏的编程操作步骤比较复杂,我一般按照以下流程进行:步骤一:建立工程项目新建立一个项目文件,这个是博途软件的基本操作,就不一一赘述了。
步骤二:添加PLC设备在“项目树”中点击“添加新设备”,选择CPU类型,在这里我选择的是CPU 1214C AC/DC/RLY,订货号是6ES7 214-1BG40-0XB0,此步骤要根据实际情况自己选择。
步骤三:添加触摸屏设备点击HMI,选择添加触摸屏型号。
在这里我添加的是TP700 精智面板,订货号是6AV2 124-0GC01-0AX0。
步骤四:设置触摸屏并组态(1)在成功添加完PLC和触摸屏设备后,软件自动弹出触摸屏设置向导,点击“浏览”按钮,选中之前添加好的PLC进行组态。
(2)接下来是在HMI设备向导中逐步对触摸屏进行设置,首先是画面布局,在这里可以设置画面的分辨率、背景颜色、页眉的显示信息,一般我比较习惯于不添加页眉,这样画面看起来比较清晰。
只要去页眉前面的勾选项就OK了。
(3)报警信息设置,默认的这三个选项都是选中状态,在这里只保留中间的未决报警,只有在发生错误时才弹出报警画面。
(4)添加触摸屏画面,如果你做的项目需要多个画面,可以在这里设置“根画面”和“子画面”,在根画面图标上点击+号,就可以在根画面下新增一个“子画面”了。
(5)设置系统画面,可以选择是否显示项目信息、系统设置、用户管理、系统信息等特定功能的画面,在这里我全部去掉勾选,不再显示。
(9)按钮设置,可以显示启始画面、登录、语言、退出这些系统按钮,同时也可以选择按钮在画面中显示的位置。
S7-1200的被控仿真对象PID自整定过程
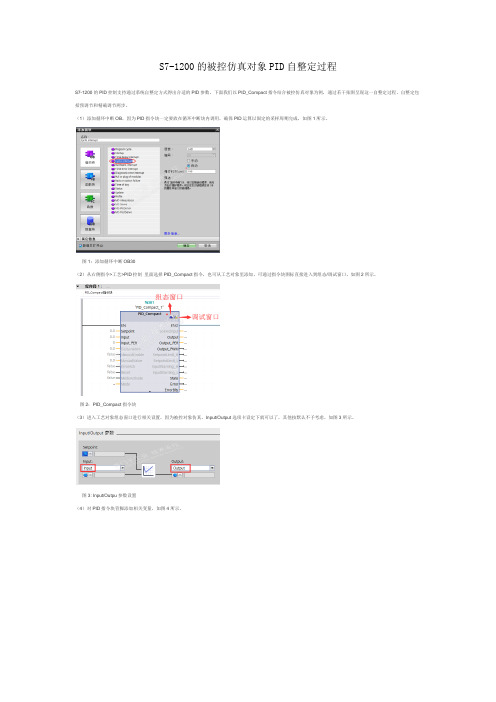
S7-1200的被控仿真对象PID自整定过程S7-1200的PID控制支持通过系统自整定方式得出合适的PID参数,下面我们以PID_Compact指令结合被控仿真对象为例,通过若干张图呈现这一自整定过程,自整定包括预调节和精确调节两步。
(1)添加循环中断OB,因为PID指令块一定要放在循环中断块内调用,确保PID运算以固定的采样周期完成,如图1所示。
图1:添加循环中断OB30(2)从右侧指令>工艺>PID控制里面选择PID_Compact指令,也可从工艺对象里添加,可通过指令块图标直接进入到组态/调试窗口,如图2所示。
图2:PID_Compact指令块(3)进入工艺对象组态窗口进行相关设置,因为被控对象仿真,Input/Output选项卡设定下就可以了,其他按默认不予考虑,如图3所示。
图3: Input/Outpu参数设置(4)对PID指令块管脚添加相关变量,如图4所示。
图4:给PID指令块管脚添加变量(5)从全局库添加PID被控对象仿真块到循环OB中,该仿真块可以从西门子全球技术资源下载,条目号79047704,如图5所示。
图5:调用被控对象仿真块(6)PID的输出值作为被控仿真对象的输入,被控仿真对象的输出作为PID的反馈值,如图6所示。
图6:被控对象仿真块管脚变量(7)下载程序到PLC并进入调试(自整定)界面,先启动测量,此时预调节条件还未满足,如图7所示。
图7:进入到工艺对象PID调试面板(8)满足预调节主要条件1:设定值-当前值>(过程值上限-过程值下限)×30%,设定值-当前值>设定值×50%,如图8所示。
图8:修改设定值来满足预调节条件(9)满足预调节主要条件2,PID必须处于“未激活”、“手动”、或“自动”模式,如图9所示。
图9:PID已在手动模式(10)启动预调节,如图10所示。
图10:预调节开始(11)预调节结束并上传参数,如图11所示。
plc自己编写pid案例
plc自己编写pid案例在工业自动化控制领域,PLC(可编程逻辑控制器)是一种常用的控制设备,而PID(比例-积分-微分)控制是一种常见的闭环控制算法。
在本文中,我们将介绍如何使用PLC自己编写PID控制的案例。
首先,我们需要了解PID控制的基本原理。
PID控制器根据当前偏差的大小,通过比例、积分和微分三个部分来调节控制输出,以使系统稳定在设定值附近。
在实际应用中,我们需要根据系统的特性来调节PID参数,以达到最佳的控制效果。
接下来,我们将以温度控制系统为例,介绍如何使用PLC自己编写PID控制。
假设我们需要控制一个加热器,使其保持在设定温度附近。
首先,我们需要安装温度传感器,并将其信号接入PLC的输入端口。
然后,我们需要将加热器的控制信号接入PLC的输出端口。
在PLC编程软件中,我们可以创建一个PID控制的函数块,并在其中设置比例、积分和微分参数。
然后,我们需要编写一个主程序,通过读取温度传感器的数值,并根据PID算法计算出控制输出,最终控制加热器的工作状态。
在实际编写PID控制程序时,我们需要注意以下几点,首先,根据系统的特性来调节PID参数,以使系统稳定在设定温度附近;其次,需要考虑系统的动态响应特性,避免出现过调和欠调现象;最后,需要对控制输出进行限幅处理,以避免对加热器的损坏。
通过以上步骤,我们就可以使用PLC自己编写PID控制的案例。
通过合理调节PID参数,我们可以实现对加热器的精确控制,使其保持在设定温度附近,从而提高生产效率并节约能源消耗。
总之,PLC自己编写PID案例是工业自动化控制中常见的应用之一。
通过合理调节PID参数,并结合PLC的控制功能,我们可以实现对各种控制系统的精确控制,从而提高生产效率并降低成本。
希望本文的介绍能够对大家有所帮助,谢谢阅读!。
1200 pid使用方法
1200 pid使用方法
S7-1200 PLC的PID控制器可以通过PID_Compact指令块进行配置和使用。
以下是使用步骤:
1. 添加新块OB30。
2. 在OB30中调用PID指令块。
3. 根据实际需求设置PID控制器的参数,包括控制类型、输入/输出参数、
过程值设置、过程值监视、PWM限制(脉宽)、输出值限值和PID参数等。
4. 启动自整定功能,让PID控制器自动识别系统的参数并进行调节,以达
到理想的控制效果。
在使用过程中,需要注意避免存储器地址冲突,如使用不同的存储器地址,避免数据读取和写入时的冲突。
此外,需要根据实际需求和系统特性选择合适的控制类型和参数设置,以保证系统的稳定性和控制精度。
以上信息仅供参考,建议请教专业人士获取准确信息。
西门子S7-12001500PLC中深度解析PID(2)
西门子S7-12001500PLC中深度解析PID(2)【S7-1200 /1500PID 控制功能说明一样,下面以 S7-1200 为例介绍】(1)PID 基本功能介绍1.CPU 提供了PID 控制器回路数量受到CPU 的工作内存及支持DB 块数量限制。
严格上说并没有限制具体数量,但实际应用S7-1200PLC 推荐不要超过 16 路PID 回路为最佳。
S7-1500 根据型号不同,PID 控制回路实际应用也不一样。
2.PID 控制器结构PID 控制器功能主要依靠三部分实现,循环中断块,PID 指令块,工艺对象背景数据块。
用户在调用PID 指令块时需要定义其背景数据块,而此背景数据块需要在工艺对象中添加,称为工艺对象背景数据块。
PID 指令块与其相对应的的工艺对象背景数据块组合使用,形成完整的 PID 控制器。
PID 控制器结构如图循环中断块可按一定周期产生中断,执行其中的程序。
PID 指令块定义了控制器的控制算法,随着循环中断块产生中断而周期性执行,其背景数据块用于定义输入输出参数,调试参数以及监控参数。
此背景数据块并非普通数据块,需要在目录树视图的工艺对象中才能找到并定义。
(2)S7-1200 的PID 功能应用说明1.调用PID 通用功能块备注:1.PID_Compact 指令提供了一种可在自动和手动模式下进行调节的 PID 控制器。
2.以调用 OB 的循环时间的恒定间隔(最好在循环中断 OB 中)调PID_Compact。
3.CPU 的存储区的占用情况,及支持 DB 块数量的限制。
4.在循环中断里调用 PID 指令,需要保证中断里执行 PID 指令的总时间要小于该中断的循环时间。
2. PID_COMPACT 通用功能模块应用步骤说明3.PID_COMPACT 调节过程说明使用PID_compact的控制步骤:1.在循环OB中插入和参数化PID_compact2.自动插入工艺对象3.组态工艺对象4.使用集成的自整定功能和Trace功能调试与整定4.CPU 处理 PID 的时间5.存储器要求(3)PID 组态与编程说明1.创建循环中断组织块 OB30,循环时间为 100ms,在 OB30 里面调用 PID_Compact2.功能块 PID _ Compact 输入输出参数说明PID_ Compact 输入参数说明Setpoint(REAL):PID 控制器自动模式下的设定值工程量(对应于 INPUT 反馈值类型)Input(REAL):PID 控制器反馈值(工程量如:0.0-100.0)Input_PER(INT):PID 控制器反馈值(模拟量如:0-27648)Disturbance(REAL):扰动变量或预控制值(一般为 0.0)。
西门子博途S7-1200PLC编程之PID控制实例(3)
西门子博途S7-1200PLC编程之PID控制实例(3)创建工艺对象 PID 控制器【简介】以下步骤将介绍如何在循环中断OB“PID[OB200]”中调用工艺对象“PID_Compact”。
【要求】● 已创建带有 PLC S7-1200 的项目。
● 已创建一个循环中断 OB 并在项目视图中将其打开。
【步骤】要在循环中断OB“PID [OB200]”中调用工艺对象“PID_Compact”,请按以下步骤操作:1. 在组织块“PID [OB200]”的第一个程序段中,创建工艺对象“PID_Compact”。
2. 确定为工艺对象“PID_Compact”创建数据块。
【结果】已通过编程设定了在循环中断OB“PID [OB200]”中调用工艺对象“PID_Compact”并且已创建数据块“PID_Compact_DB”。
加载仿真块【简介】以下步骤介绍了如何在实例项目中加载块“PROC_C”。
该块将仿真PID 控制器的输入和输出值。
要使用这些值,在实例项目中载入库并在第二个程序段中创建该块。
【要求】组织块“PID [OB200]”已在项目视图中打开。
【步骤】要打开库并复制块,请按以下步骤操作:1. 将位于以下Internet 地址中的文件“Simulation Program PID.ZIP”复制到本地硬盘并解压缩该文件。
/CN/view/zh/40263542请单击“信息”图标查看相关 ZIP 文件。
2. 解压缩文件“Simulation Program PID.ZIP”。
3. 使用“库”(Libraries) 任务卡打开已解压缩文件目录中的全局库“Simulation”。
该库即被加载。
4. 将仿真块“PROC_C”复制到组织块“PID [OB200]”的第二个程序段中。
5. 确定为仿真块“PROC_C”创建数据块。
6. 在 OUTV 参数中定义“temperature”变量。
参数OUTV 的值存储在“temperature”变量中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西门子PLC用触摸屏按钮触发启动PID的自整定程序示例
西门子PLC用触摸屏按钮触发启动PID的自整定程序示例,首先从博途软件右侧工艺列表中选择相应的PID控制器,并托到左侧的编程程序段内,此示例中以"PID_3Step"为例说明:
将PID功能块输入输出端根据需要加入相应的变量;
点击博途软件左侧中工艺对象中相应的PID功能中组态,进行PID 根据项目实际情况进行相应参数的设置:
变量设置:M20.0-屏幕自整定启动触发按钮;M32.2-1时为精确调节,为0时为预调节;根据要求可以更改PID自整定的设定值;
下载到PLC中并运行;
触摸屏中加入自整定启动,和精确调节启动,两个按钮,并将变量与PLC中的变量一一对应;
打开博途软件左测工艺对象中的调试功能,并点击测量下面的start,启动测量,用来监视PID自整定状态是否启动及整定过程;
点击屏幕中的自整定启动按钮触发启动PID自整定功能;程
序中已启动自整定功能了;
自整定完成,程序中自动复位屏幕中的自整定启动按钮;
PID调试中显示系统已调节,PID自整定完成。