基于Ackermann规则的全程滑态变结构控制器及应用
基于Ackermann规则的准滑模控制器设计

基于Ackermann规则的准滑模控制器设计作者:米文鹏来源:《读写算·教研版》2014年第14期摘要:滑模变结构控制因为独特的优势在很多领域有着广泛的应用前景,但是因其存在“抖动”现象,其应用受到极大的限制,本文设计了一种准滑模控制来消除这种“抖动”,并在设计滑模面时采用Ackermann规则进行设计。
关键词:Ackermann规则;准滑模;饱和函数中图分类号:G632 文献标识码:B 文章编号:1002-7661(2014)14-108-01变结构控制系统因为系统一旦进入所设计的滑模面,系统对内部参数的变化和干扰便具有不变性,正因为它这一独特的优势,它在航空航天、机器人、伺服控制等领域有着广泛的应用。
但是一般的变结构控制器有一个很大的缺点,那就是“抖动”现象,这就使它在具体的应用中受到了很大局限。
如何克服滑模控制本身带来的抖动,成为很多学者研究的重点,而准滑模控制为这一难点提供了有效的解决途径,它通过在边界层外采用正常的滑模控制,在边界层内采用连续状态的反馈控制,可有效地减轻或避免一般滑模控制的“抖动”现象。
一、准滑模控制器的设计首先采用到达律具有指数趋近律的变结构控制方式来设计控制器,由此所设计出的控制率,因为符号函数sgn(s)的存在而存在“抖动”。
此时我们可以用饱和函数sat(s)来代替到达率为指数趋近律的滑动模态中的符号函数sgn(s),从而达到消除抖动的目的。
其中:称为”边界层”。
其图1所示。
饱和函数的本质是:在边界层外,采用切换控制;在边界层内,采用连续状态的线性化反馈控制,有效避免或消弱“抖振”。
图1饱和函数滑模面和控制律具体形式如下:二、Ackermann公式设计滑模面在上述控制器的设计中,要设计滑模参数C的值,需要先将系统化为简约型,而后才能进行设计,而基于Ackermann规则的设计方法却并不需要如此便可使我们在希望的特征值下设计出较为满意的控制器来。
在本文的控制器设计中采用Ackermann公式进行设计。
非奇异快速终端滑模控制

; course tr a c k in g 的 抖 振及收敛缓慢问题, 文 献 [ 1 2 - 1 3 ] 提 出 了非奇异快速 终端滑模控制( n o n s in g u la r fa s t te rm in a l s lid in g m ode con lr o l, NFTSM ), 实现了当初始状态距离平衡点较远时系统
第 39卷 第 5 期 2017年 5 月
文章编号: 1001-506X (2017)05-1119-07
系统工程与电子技术
S ystem s E n g in e e rin g and E le c tro n ic s
V o l . 39 M ay
N o .5
2017
网址: www. sys-ele. com
{DeparLmenL o f M e c h a n i c a l E n g i n e e r i n g , A c a d e m y o f A r m o r e d F o r c e s E n g i n e e r i n g , B e i j i n g 1 0 0 0 7 2 , C h in a )
〇 引 言
终端滑模控制( te rm in a l s lid in g m ode c o n tr o l , TTSMC ) 由于在滑模面的设计中引入了非线性项, 使得系统状态可 在有限时间内收敛至平衡点M , 目前已得到了广泛的关 注[ 3 _5]。然而当系统状态接近于零时, T S M C 的控制量可能 趋于无穷大, 即出现奇异现象[ 6 _7], 这限制了 T T S M C 在非线 性控制中 的 进 一 步 应 用 。为 解 决 该 问 题 , 文 献 [ 8 - 9 ] 提出 了 非 奇异终端滑模控制 ( n o n s in g u la r te rm in a l a lid in g m ode
【CN110027009A】一种新型可控阻尼关节【专利】
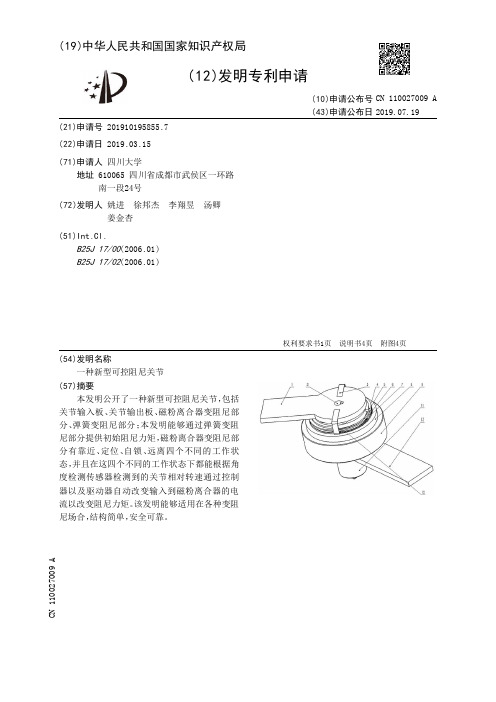
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910195855.7(22)申请日 2019.03.15(71)申请人 四川大学地址 610065 四川省成都市武侯区一环路南一段24号(72)发明人 姚进 徐邦杰 李翔昱 汤卿 姜金杏 (51)Int.Cl.B25J 17/00(2006.01)B25J 17/02(2006.01)(54)发明名称一种新型可控阻尼关节(57)摘要本发明公开了一种新型可控阻尼关节,包括关节输入板、关节输出板、磁粉离合器变阻尼部分、弹簧变阻尼部分;本发明能够通过弹簧变阻尼部分提供初始阻尼力矩,磁粉离合器变阻尼部分有靠近、定位、自锁、远离四个不同的工作状态,并且在这四个不同的工作状态下都能根据角度检测传感器检测到的关节相对转速通过控制器以及驱动器自动改变输入到磁粉离合器的电流以改变阻尼力矩。
该发明能够适用在各种变阻尼场合,结构简单,安全可靠。
权利要求书1页 说明书4页 附图4页CN 110027009 A 2019.07.19C N 110027009A权 利 要 求 书1/1页CN 110027009 A1.一种新型可控阻尼关节,其特征在于:包括关节输入板(1)、关节输出板(13)、磁粉离合器变阻尼部分、弹簧变阻尼部分;所述磁粉离合器变阻尼部分包括磁粉离合器(9)、磁粉离合器轴(2)、角度检测传感器(11)、控制器以及磁粉离合器驱动器;所述弹簧变阻尼部分包括摩擦环(8)、压缩弹簧(5)、连接弹簧(12)、压环(4)、连接弹簧支撑板(3)、摩擦片(6)、摩擦块(7);所述磁粉离合器变阻尼部分包括磁粉离合器(9)、磁粉离合器轴(2)、角度检测传感器(11)、控制器以及磁粉离合器驱动器,其特征是,所述磁粉离合器轴(2)上端与所述关节输入板(1)固定连接,所述磁粉离合器轴(2)穿过所述磁粉离合器(9),并与磁粉离合器内转动部分连接,所述磁粉离合器轴(2)下端穿出所述磁粉离合器(9),并与角度检测传感器(11)内转动部分连接;所述弹簧变阻尼部分包括摩擦环(8)、压缩弹簧(5)、连接弹簧(12)、压环(4)、连接弹簧支撑板(3)、摩擦片(6)、摩擦块(7),其特征是,所述连接弹簧支撑板(3)上端与所述关节输入板(1)固定连接,下端与所述连接弹簧(12)一端连接;所述连接弹簧(12)的另一端与所述摩擦块(7)连接;所述连接弹簧(12)及所述摩擦块(7)放在摩擦环(8)的圆形摩擦槽(82)中;所述摩擦环(8)与所述磁粉离合器(9)的外转动部分固定连接;所述压环(4)通过螺纹与摩擦环(8)上部凸台螺纹(81)连接;所述压环(4)下面装有压缩弹簧(5);所述压缩弹簧(5)下面装有摩擦片(6);所述摩擦片(6)下面装有摩擦块(7)以及连接弹簧(12);所述压缩弹簧(5)套在摩擦环凸台(84)上;所述摩擦片(6)套在摩擦环凸台(84)上。
匀速旋转弹性薄板分布动载荷时域识别

匀速旋转弹性薄板分布动载荷时域识别
邓军;陈国平
【期刊名称】《振动、测试与诊断》
【年(卷),期】2011(031)006
【摘要】以典型的基于Kirchhoff假设的匀速旋转弹性薄板为对象,研究其动载荷时域识别技术.首先,从结构动力学的正问题着手,建立弹性薄板在匀速旋转情况下受到分布动载荷时的受迫振动微分方程;然后,选取一种通用厚薄板单元并分析其有限元形式;最后,研究对应的基于广义正交多项式的匀速旋转薄板动载荷时域识别技术.数值算例表明,该时域识别技术精度较高,计算稳定性良好,方法简单有效,适合在工程中应用.
【总页数】4页(P724-727)
【作者】邓军;陈国平
【作者单位】长沙理工大学土木与建筑学院长沙,410004;2南京航空航天大学飞行器结构力学与控制教育部重点实验室南京,210016
【正文语种】中文
【中图分类】TH133.3;TB12
【相关文献】
1.基于固有振型的复杂结构分布动载荷时域识别
2.旋转铁木辛柯梁分布动态载荷的时域识别研究
3.基于正交多项式旋转梁分布动载荷时域识别
4.矩形薄板面内非线性分布载荷下的辛弹性力学解
5.空间一维结构分布动载荷时域识别方法
因版权原因,仅展示原文概要,查看原文内容请购买。
哈特曼探测器的高精度调节机构

Hi g h p r e c i s i o n a d j u s t a b l e me c h a n i s m f o r
S ha c k - Ha r t ma n n s e ns o r
L I We n — j i e , M U Qu a n — q u a n , W ANG S h a o — x i n ,
b a s e d o n a n a u t o c o l l i ma t o r .Th e a d j u s t a b l e r a n g e a n d a c c u r a c y a s we l l a s t h e d y n a mi c s p e c i a l t y we r e
收 稿 日期 : 2 0 1 5 — 0 1 — 2 o ; 修 订 日期 : 2 0 1 5 — 0 2 — 1 7 .
基金项 目: 国家 自然 科 学 基 金 资 助 项 目( N o . 1 1 1 7 4 2 7 4 , N o . 1 1 1 7 4 2 7 9 ,No . 6 1 2 0 5 0 2 1 , No . 1 1 2 0 4 2 9 9 , No . 6 1 3 7 7 0 3 2 ,
c u r a c v . As s o c i a t i n g t he u s e pa t t e r n o f t h e a c t ua t or wi t h t he ou t l i ne o f t he Ha r t ma n n s e ns o r,ma i n p a —
o D t i c a l a n a l y s i s ,i t p o i n t s o u t t h a t t h e me c h a n i s m n e e d s± 1。a d j u s t a b l e a mo u n t a n d 6”a d j u s t a b l e a c —
基于线性化扩展卡尔曼滤波器的空心杯永磁同步电机控制系统

中图分类 号 : T M 3 0 1 . 2
文献标志码 i A
文章 编号 : 1 6 7 3 — 6 5 4 0 ( 2 0 1 3 ) 0 7 - 0 0 4 3 - 0 4
Co n t r o l S y s t e m f o r Co r e l e s s P e r ma n e n t Ma g n e t S y n c h r o n o u s
P MS Ms Wa s a n a l y z e d .A E KF mo d e l i n t h e r o t a t i n g c o o r d i n a t e wa s c r e a t e d,a n d a l i n e a r lg a o r i t h m b a s e d o n t h e me t h d o o f s u b s t i t u t i o n w a s p r e s e n t e d .T h e r e s u l t s s h o w e d t h a t t h e p r o p o s e d lg a o r i t h m c o u l d a c c u r a t e l y e s t i ma t e t h e r o t o r p o s i t i o n
A b s t r a c t :T h e p r i n c i p l e o f e x t e n d e d K a l ma n i f l t e r ( E K F )a p p l i e d i n t h e s e n s o  ̄ e s s c o n t r o l s y s t e m o f c o r e l e s s
基于径向基函数神经网络的多关节机器人滑模控制器

基于径向基函数神经网络的多关节机器人滑模控制器邵克勇;马千惠;邹运;高杰;韩丽娟【摘要】针对具有不确定性的多关节机器人系统,提出了一种径向基函数神经滑模控制方法;该控制方案采用全局滑模面,将神经网络的非线性映射能力与滑模控制的特点相结合,利用径向基神经网络自适应学习系统不确定性的未知上界,消弱了由滑模控制产生的抖动,同时保证了系统的鲁棒性;基于李亚普诺夫定理给出了系统稳定性的充分条件;仿真结果表明,该方法具有良好的轨迹跟踪和速度跟踪性能,提高了对于建模误差和不确定干扰等因素的鲁棒性.【期刊名称】《计算机测量与控制》【年(卷),期】2014(022)005【总页数】3页(P1385-1387)【关键词】多关节机器人;径向基神经网络;滑模控制;轨迹跟踪【作者】邵克勇;马千惠;邹运;高杰;韩丽娟【作者单位】东北石油大学电气信息工程学院,黑龙江大庆 163000;东北石油大学电气信息工程学院,黑龙江大庆 163000;东北石油大学电气信息工程学院,黑龙江大庆 163000;东北石油大学电气信息工程学院,黑龙江大庆 163000;东北石油大学电气信息工程学院,黑龙江大庆 163000【正文语种】中文【中图分类】TP240 引言机器人系统具有时变、强耦合和非线性动力学特性的多输入、多输出非线性系统,其控制十分复杂。
滑模控制因其在滑动模态对系统的干扰和摄动具有完全适应性而被广泛应用于机器人控制中。
滑模控制具有控制简单、易于实现、降阶、解耦作用等优点,但却有存在很强的抖动,并且滑模控制要求系统各个不确定性的上界值已知,但对于实际的机器人系统,其上界一般无法精确测量。
径向基神经网络结构简单、训练简洁且收敛速度快,能够逼近任意非线性函数[1]。
由于滑模控制的不足,促使其与神经网络控制相融合,许多学者提出了神经滑模变结构控制方案。
文献[2]用神经网络自适应学习机器人系统不确定性的未知上界,保证机械手位置和速度跟踪误差渐近收敛于零。
写作方法机械工程论文题目机械论文题目开题报告毕业论文文献综述
187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237
整经机经轴上落运输机器人机械结构设计研究 薄膜力学性质及台阶势垒影响下的表面形貌计算模拟研究 CQS-550型道岔清筛机运用优化设计 基于冻融干湿作用的非饱和黄土力学性质试验及工程应用研究 机械臂运动的示教学习方法与应用研究 低速风洞三自由度机械臂及其控制系统设计 矿用挖掘机提升机构齿轮传动系统动力学分析及优化设计 基于ROS的同位素分装机器人运动规划及控制仿真研究 二自由度机械臂运动控制及试验研究 铣车复合加工中心直驱摆头动力刀架支架轻量化设计 高锰钢辙叉机械冲击预硬化的研究 仿人柔性臂的交互控制研究 面向视觉三维测量的机器人手眼标定技术研究 具有有限性能关节的机械臂最优轨迹控制方法及避障研究 基于DQN的机械臂控制策略的研究 多年冻土区路基填土力学性质变化及长期变形研究 CANDU-6核燃料元件制造成型工序自动化研究 探索细胞内主动机械力的产生 NW型风电增速器的非线性动力学建模与综合性能优化设计 航空发动机叶片自动装配控制系统研究 新型抗负载波动大惯量回转控制阀动态特性优化设计 轴流泵水力模型优化设计方法及关键技术研究 底部扫描光固化3D打印机的研制 煤矿主扇风机在线监测监控与故障诊断系统 基于PLC的画家座椅的研制与开发 离心式热媒泵结构设计和优化 基于ADAMS的空间四杆机构参数化建模分析优化系统研发 椎板磨削手术机器人的设计与研究 嵌套试验设计在机械设备优化设计中的应用研究 黄土高原沟壑区不同土地利用下的土壤水力学性质变化研究 论文服务TB交易验货过后付款三W点SOSLW点COM/V信EDiTORKiNG CANDU-6核燃料芯块烧结自动上下料系统研制及其应用 洗衣机用永磁无刷电动机的噪音降低方法 海洋绞车机械系统设计与关键结构优化 基于联合仿真分析的海洋绞车盘式制动系统力学性能研究 新型6,6,12-石墨炔纳米管的理论研究 基于强度比较的铧式犁机架设计方法研究 船用低速主机台架试验振动特性与减振方法研究 某中型客车传动轴振动仿真分析 YM60型农用变速箱孔系加工自动化设备的研发 基于分形理论的微线段齿轮的加工方法及其表面精度研究 低维材料的电—力学性质和晶体结构的理论计算研究 矿用振动筛弹簧永久变形故障动力学特性及实验研究 智能机器人“人—机—环境”交互及系统研究 天然橡胶包装生产线自动化改造 靶室内防护层拆装设备设计与分析 多关节串联机器人的建模与运动控制 颗粒的相互作用与宏观力学性质的关系研究 类沸石结构1,2,4-三氮唑锌骨架材料的高压和弹性性质的研究 基于Cortex-M3的新型低频力学谱仪研究与实现 细粒尾矿料力学特性及其筑坝静动力分析
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基 于Ac eman规 则 的全 程滑 态 变结 构控 制 器及 应用 kr n
宋开 亮 ,米 文鹏 ,洪 成华 ,郝 志虎 ( .第 二炮 兵 工程 学 院 6 3教研 室 , 陕西 西安 7 0 2 ;2 1 0 1 0 5 .青 州 士官 学校 13教研 室 , 山东 青 州 2 2 o ; 0 6 5 o
3 .长 安 大 学 汽 车 学 院 , 陕 西 西 安 7 0 6 ) 10 4
摘要 :变结构 控 制是 解 决在 飞行 过程 中参数 、干扰 不 断 变化 的导 弹控 制 的 一种 新途 径 。 于 A kr n 则的 滑 态 基 ce man规 变结 构控 制 器 ,在 所设 计 的 滑态 函数 中引入 全程 滑 态 因子 ,既 能保 留基 于 Ac ema n 规 则设 计 变结构 控 制 器简单 的优 kr n
( . . 0 tf o Th e o dAri e yEn i e rn le e Xia 0 2 , i a 1 No 6 3 S a Ro m, eS c n t lr gn e i gCo lg , ’ n71 0 5 Ch n ; l
2 No 1 3Sa o m, n z o et f cr nt ue f L Qig h u2 2 0 , ia . . 0 tf R o Qig h uP t Of e s tt o A, n zo 6 5 0 Chn ; y i I i P 3 S h o f u o t e C a g a i e s y Xi n 7 0 6 , h n ) . c o l t moi , h n ’nUn v ri , ’ 0 4 C i a o A v t a 1
g o a ld n a t r n si i g f n t n I o n y p e e v s t e a v n a e o e i n n C b s d o k r a n’ l , l b lsi i g f c o si ld n u c i . tn to l r s r e d a t g fd sg i g VS a e n Ac e m n Sr e o h u b ta s lmi t st er a h n n e v 1 Ati e c n r l y t m s d o h o to y h sg o a o u t e s Th e u t u l o e i na e h e c i g i t r a . tt ud ・ o to s e ba e n t e c n r l s wa a l b l b s n s . er s l r
O 引言
导 弹运 动 最 大 的特 点 是 其参 数 和 干扰 不 断 变 化 ,使 所 设 计 的控 制 系 统 对 参 数 和 干 扰 的 变 化 具 有
兵 工 -动 化 目曲■一源自撞嗣 Au o ai e s r me t n n r l t m t M a u e n d Co to c a
0. . t ma i n I Au o to
2 0 , 1 2 , .1 0 8 Vo . 7 No 1
20 0 8年第 2 7卷第 1 期 1
势 ,又 消除 了能 达阶段 ,实现 姿 态控 制 系统 的全局 鲁 棒性 控 制 ,仿 真 结果 表 明该控 制 器性 能较 为 满意 。
关键 词 :A kr n 规 则 ;全程 滑 态 变结构 控 制 ;姿 态控 制 系统 ;全 程 滑 态 因子 ce man
中图 分类 号 :T 2 3 P 7 文献标 识 码 :A
i tr e e c u n h i h fmi sl s Pu o wa d o e v ra l tu t r o to l rb s d o k r a n Sr l , n d p n e r n e d r g t e fg t s i . tf r r n a b e sr c u e c n le a e n Ac e m n ’ u e a d a o t f i o e i r
s o h t h o to l rp r o ma c s g o . h wst a e c n r le e f r n ei o d t Ke wo d : k r a n Sr l ; o l y r s Ac e m n ’ u e Gl ba C: t u e c n r ls s e ; o a ld n a t r VS At t d . o to y t m Gl b lsi i g f c o i
Ab t c : a ibe s u tr o t l( C s a n w y t o v r b e ie c n t n h n e o a a t r a d s a t V ra l t cu e c n o VS )i e wa o s l e p o lms l o s tc a g fp r mee s n r r r k a
Gl b l l i gVS n t p i a i n Ba e n Ac e m a n’ Ru e o a i n C a d IsAp l to s d o k r n S S d c l
S ONG ila g , IW e - e g , Ka —i n M n p n HONG e g h a , Ch n - u HAO ih Zh — u