12-立体像对的绝对定向理论
立体观察与相对定向
为便于理解两种相对定向元素,引入相对方位元素:像片在选定 的像空间辅助坐标系中的位置(摄影中心S的坐标 X S , Y S , Z S )和 姿态(像片的姿态角 , , k )称为像片的相对方位元素。
解析法相对定向
⑴连续像对相对定向元素
连续像对相对定向是以左片为基准,求出右片相对于左片的相对 方位元素。选定像空间辅助坐标系S1-X1Y1Z1,使左片在S1-X1Y1Z1 Z 中的相对方位元素为已知值 X B ,Y B , 右 Z B , , , k Y 以左片的像空间坐标 : S X 系为像空间辅助坐标 Z y 系。此时左右片的相 B B Y 对方位元素是: B B
解析法相对定向
为像点的像空间辅助坐标
(二)、连续像对相对定向
Z2 Y2 Z1 Y1 B X1 Bx S2 X2 y2
Bx X1 X2
x2
By Y1 Y2
Bz Z1 0 Z2
Bz
By a2(X2 ,Y2 ,Z2)
S1 y1
a1(X1 ,Y1 ,Z1) x1
X 1 x1 Y y 1 1 Z1 f
立体观察
双目镜观测光路的立体观察
像 对 的 立 体 观 察 方 法 通过双筒望远镜观察,每个望远镜像面有一固定的 测标,像片可在两个相互垂直方向共同移动,也可 一张像片相对于另一张像片移动,可以分别对左右 像片进行调焦、亮度调节及必要旋转,观测系统放 大倍率可调节。
立体观察
立 体 量 测 原 理 左右像片同名像点的 坐标量测值为( x a , y a ), ' ' xa , ya ) ( ' 左右视差: p x a x a ' 上下视差: q y a y a
摄影测量学第09讲-相对定向

A
由像点 a和基线B所构成的核面与坐标平面 ZX(即左主核面) 的夹角θ和由像点a′和基线B所构成的核面和坐标平面XZ(即左主 核面)的夹角θ′相等,由此保证相应光线共处于同一个核面内。 18
山东科技大学测绘科学与工程学院
5.2.1 相对定向条件方程——共面条件方程
(1)连续像对系统的共面条件方程
0 0 F X Y Bz X' Y' 1 Z Z'
Bx F X φ2 X' φ2
By Y Y' φ2
Bz Z Z' φ2
Bx F X 2 X' 2
By Y Y' 2
Bz Z Z' 2
Bx F X 2 X' 2
By Y Y' 2
12
山东科技大学测绘科学与工程学院
5.2.1 相对定向条件方程——共面条件方程
BX X X'
BY Y Y'
BZ Z 0 Z'
BX
13
BY
0 Z Y X BZ Z 0 X Y 0 0 Y X Z
左像点的 变换坐标 右像点的 变换坐标
BX X X'
10
BY Y Y'
BZ Z 0 Z'
a2 X a1 Y b1 b2 Z c c 2 1
x2 a3 y2 b3 f c3
山东科技大学测绘科学与工程学院
BX X X' BY Y Y' BZ Z 0 Z'
• 选基线坐标系——单独像对系统 Y Z 此时BY=BZ=0 0
摄影测量复习题

、名词解释1、像片比例尺:把摄影像片当做水平像片,地面取平均高程,这时相片上线段l 与地面上相应线段水平距离 L 之比。
2、绝对航高 :相对于平均海平面的航高,是指摄影物镜在摄影瞬间的真实海拔高度。
3、相对航高:摄影机物镜相对于某一基准面的高度。
4、像点位移:在实际航空摄影时,在中心投影的情况下,当航摄的飞行姿态出现较大倾斜,地面有起伏 时,便会导致地面点在航摄相片上构象相对于在理想情况下的构象,产生位置的差异,这一差异称为像 点位移。
5、摄影基线 :航线方向相邻两个摄影站点间的空间距离。
6、航向重叠:同一条航线内相邻像片之间的影像重叠7、旁向重叠:两相邻航带像片之间也需要有一定的影像重叠,这种重叠影像部分称为旁向重叠度。
8、像片倾角:摄影瞬间摄影机主光轴偏离铅垂线的夹角称为相片倾角。
9、像片的方位元素:确定摄影瞬间摄影物镜(摄影中心)与像片在地面设定的空间坐标系中的位置与姿 态参数,即确定这三者之间相关位置的参数。
10、像片的内方位元素:表示摄影中心与像片之间相互位置的参数。
11、像片的外方位元素:表示摄影中心与像片在地面坐标系中的位置和姿态的参数。
12、相对定向元素:确定一个立体像对两像片的相对位置的元素 。
13、绝对定向元素:描述立体像对在摄影瞬间的绝对位置和姿态的参数。
14、单像空间后方交会:利用影像覆盖范围内一定数量的控制点的空间坐标与影像坐标,根据共线条件 方程,反求该影像的外方位元素,这种方法称单幅影像的空间后方交会。
15、空间前方交会:由立体像对左右两影像的内、外方位元素和同名像点影像坐标量测值来确定相应模 型点坐标(或地面点的地面坐标) ,称立体像对的空间前方交会。
16、双像解析摄影测量:17、空中三角测量:根据航摄像片上所测量的像点坐标以及极少量的地面控制点求出地面加密点的物方 空间坐标。
18、POS :(机载定位定向系统)是基于全球定位系统(GPS )和惯性测量装置(IMU )的直接测定影像外方位元素的现代航空摄影导航系统,可用于在无地面控制或仅有少量地面控制点情况下的航空遥感对 地定位和影像获取。
摄影测量知识
摄影测量个人理解焦距:物镜中心到像底片的距离。
物镜中心即是摄影中心,这个距离与摄影中心到空中像片距离相等。
空中像片与像底片刚好相反。
物镜实际上是一组透镜组成,可以看做一个物镜中心。
像主点理解为近似像片的中心点,实际上在像片中位置并不在中心,坐标称为像主点坐标,加上焦距构成内方位元素。
量测型相机内方位元素已知,现在所用的数码相机一般为非量测型相机,内方位元素可通过像控点平差后计算得到。
由于地面的不平整,实际上像片上对应地面各点处处比例尺都不相同,通过像片纠正,将中心投影转化为正射投影结果。
内方位元素与外方位元素,内方位元素为像主点坐标x,y,焦距f;外方位元素为摄影中心的空间位置X、Y、Z和空间姿态像片旋角、航向倾角和旁向倾角,即横滚、俯仰、航向。
共线方程的本质是摄影中心、像片点和地面点的共线构成的相似三角形。
人眼能看到物体远近的原理为双眼看同一物体产生的生理视差,也就是到左右眼的距离不同。
生理视差是产生天然立体感觉的根本原因。
比如航天远景,就是通过左右眼看不同片子中的同一物体,产生的远近不同从而产生立体感。
立体测图基本过程:内定向、相对定向、绝对定向。
共线方程,涉及到12个参数,像主点坐标x、y,焦距f,地面点坐标X、Y、Z以及6个外方位元素(3个平移3个旋转)摄影测量的基本过程:1相对定向与相对定向元素。
相对定向:确定立体像对的两像片的相对位置,原理是:两像片上同名像点的投影光线对对相交。
相对定向元素有5个。
模型的大小与方位是任意的,相对关系准确。
2绝对定向与绝对定向元素。
绝对定向:借助地面控制点对模型进行平移、旋转与缩放,确定绝对位置与方位。
绝对定向元素7个,3个平移3个方向余弦1个缩放。
需要至少三个控制点(两个平高点和一个高程点)3单像空间后方交会:利用至少三个地面控制点的坐标与对应三个像点坐标,根据共线方程反求像片6个外方位元素。
4立体像对前方交会:由立体像对中两张像片内、外方位元素和像点坐标来确定相应地面点坐标。
第4章 双像立体测图原理与立体测图

o a
1
1
n
1
B
W
A
n
2 2
o a 2 S
2
P
2
J
2
S1
A
P J
1 1
o a
1
1
n
1
B
n
2 2
o a 2P2S来自2J2
S1
W
A
A
通过像底点的核面,称为垂核面。因为左右像片的底点与摄影 基线B位于同一铅垂面内,所以一个像对只有一个垂核面。垂
核面与像片面的交线称为垂核线。
§4-2立体像对与立体测图原理
B
的。
②两眼各看一张像片,即必须分像。 ③必须使同名像点的连线与眼基线平 行,以保证两视线 内。 在同一个视平面
P1 OL BL C L AL a1 c 1
C
b1 c2
a2 OR
b2 P2
④比例尺基本一致(比例尺的差异小
于比例尺的16%)
BR
CR AR
§4-1双像立体测图原理与立体测图
三、立体观察与立体量测 直接对像对进行目视观察时,立体观察条件中, 最难满足的是? 1.立体观察方法
ZT
A
YT
OT
XT
从方程个数 来讲,必须 要至少3个 方程。
复 习 Review
z S
y
x
y
a o
x
ZT
A
YT
从方程个数 来讲,有4 个方程,可 以解算
OT
XT
§4-2立体像对与立体测图原理
航向重叠60%
§4-2立体像对与立体测图原理
1、立体像对的定义(Stereo Pair)
由不同摄站获取的,具有一定影像重叠的两张像片。
摄影测量学总复习
(一)名词解释(1)摄影测量:摄影测量是利用摄影所获得的影像来测定目标物的形状、大小、位置、性质和相互关系的一门学科。
(2)摄影比例尺:摄影像片水平、地面取平均高程时,像片上的线段l与地面上相应的水平距L之比。
(3)地面采样间隔(Ground Sample Distance, GSD):指的是数字影像上一个像素所对应的地面尺寸。
(4)航向重叠度:相邻像片在航线上的重叠度。
(5)旁向重叠度:相邻航线之间像片的重叠度。
(6)像片倾斜角:摄影瞬间摄影机主光轴与铅垂线的夹角。
(7)摄影基线:航向相邻的两个摄站之间的距离。
(8)航线间隔:相邻航线之间的距离。
(9)像片旋偏角:相邻像片的像主点连线与像幅沿航线方向的两框标连线之间的夹角。
(10)中心投影:所有投射线或其延长线都通过一个固定点的投影,叫做中心投影。
(11)透视变换:两个平面之间的中心投影变换,称为透视变换。
(12)相对航高:指摄影飞机在摄影瞬间相对于所测区域的平均高程面的高度。
(13)像片内方位元素:确定投影中心与像片之间相对位置的参数。
(14)像片外方位元素:确定像空系在地面辅助坐标系中位置和方向所需要的元素。
(15)像片倾斜误差:同摄站同主距的倾斜像片和水平像片沿等比线重合时,地面点在倾斜像片上的像点与相应水平像片上像点之间的直线移位。
(16)像片投影误差:当地面有起伏时,高于或低于所选定的基准面的地面点的像点,与该地面点在基准面上的垂直投影点的像点之间的直线移位。
(17)单像空间后方交:根据影像覆盖范围内一定数量的分布合理的地面控制点(已知其像点和地面点的坐标),利用共线条件方程求解像片外方位元素。
(18)立体像对:由不同摄站获取的,具有一定影像重叠的两张像片。
(19)同名像点:物方任意一点分别在左右两张影像上的构像点。
(20)左右视差:同名像点在各自像平面坐标系中的横坐标之差。
(21)上下视差:同名像点在各自像平面坐标系中的纵坐标之差。
相对定向和绝对定向的解析过程(全面)
三、相对定向元素的计算过程
量测 5 个以上的同名点(定向点) 明显点 1、2点:左、右片的像主点 人工量测:六个标准点位 3、5点:X=0,Y值最大 4、6点:X=b,Y值最大
3
4
X
1
2
5
6
相对定向标准点位
计算框图:以连续像对的相对定向为例
输入像点坐标 (x1,y1),(x2,y2) 确定初始值bu=(x1-x2)1 φ 2=ω 2=κ 2=μ =ν =0 计算右片旋转矩阵R2 计算像点的像空间辅助坐 标(u1 v1 w1)和(u2 v2 w2) 逐点计算误差方程式系数 和常数项 否
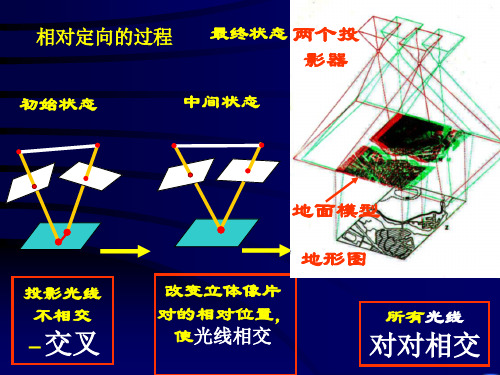
相对定向的过程
初始状态
最终状态 两个投
影器
中间状态
地面模型 地形图
投影光线 不相交
-交叉 改变立体像片 对的相对位置, 使光线相交 所有光线
对对相交
1、连续像对相对定向元素:以左片为基准,右片相对于 左片的相对方位元素 S1 u1v1w1 左片的像空间坐标系 像空间辅助坐标系的选取: S2 u2v2 w2 与 S1 u1v1w1相应坐标轴平行 w2 左、右片相对方位元素 v2 左像片 S2 w1 u2 X S1 0, YS1 0, Z S1 0 y b B w v1 1 0, 1 0, 1 0 bv 右像片 S u
w1 w2
v1
S1 u1
y1
v2 b
S2
X S1 0, YS1 0, Z S1 0
u2
1 , 1 0, 1
右像片
X S 2 bu b, YS 2 bv 0, Z S 2 bw 0
y2
x2
1
1 2
1、1、2、2、2
立体像对的相对定向

主题简介
01
立体像对相对定向是摄影测量中 的重要技术,用于确定立体像对 中左右像片的相对位置和姿态关 系。
02
通过相对定向,可以恢复地物的三 维几何形态,为数字高程模型 (DEM)和数字表面模型(DSM) 的制作提供基础数据。
研究背景和意义
随着遥感技术的发展,立体像对在测绘、资源调查、城市规划等领域的应用越来越 广泛。
卫星遥感
利用卫星搭载的传感器获取地球表面的影像。
其他方式
如无人机、地面摄影等。
立体像对的获取方式
航空摄影
使用飞机或其他飞行器搭载摄影设备进行拍摄, 获取地面影像。
卫星遥感
利用卫星搭载的传感器获取地球表面的影像。
其他方式
如无人机、地面摄影等。
立体像对的处理流程
影像预处理
包括辐射校正、几何校正、色 彩校正等,以提高影像质量。
基于特征描述符,通过匹配算法找到同名点,即在不同像对中对应的点。
常用的匹配算法包括暴力匹配和FLANN匹配等。
03
பைடு நூலகம்
坐标转换
根据同名点匹配结果,通过三角化计算出旋转和平移矩阵,从而完成相
对定向。最后,将一个像对的坐标转换到另一个像对的坐标系下,实现
立体像对的配准。
相对定向的算法实现
01
特征提取
在立体像对中提取特征点,这些特征点用于后续的同名点匹配。常用的
目录
PART 01
引言
REPORTING
WENKU DESIGN
PART 01
引言
REPORTING
WENKU DESIGN
主题简介
01
立体像对相对定向是摄影测量中 的重要技术,用于确定立体像对 中左右像片的相对位置和姿态关 系。