模糊单片机NLKX230及其接口软硬件设计
基于模糊PID的通用中档单片机温度控制系统设计

第7卷 第15期 2007年8月167121819(2007)1523934203 科 学 技 术 与 工 程Science Technol ogy and Engineering Vol .7 No .15 Aug .2007 2007 Sci .Tech .Engng .基于模糊P I D 的通用中档单片机温度控制系统设计刘 军 李建伟 李慧琴(河南农业大学机电工程学院,郑州450002)摘 要 温度的控制有着十分广泛的应用,尝试设计一个具有普遍适用意义的中档单片机温度控制系统。
该系统采用模糊P I D 方法进行温度控制,采用C8051F020单片机作为控制核心。
该系统能克服普通的单片机P I D 温度控制系统的一些不足之处,达到较为理想的控制效果。
阐述了该系统的模糊P I D 控制原理,介绍了该系统的硬件结构,给出了该系统的程序框图。
关键词 模糊P I D 单片机 温度控制 系统设计中图法分类号 TP273.6; 文献标识码 A2006年10月13日收到 河南省科技攻关项目(0624260033)资助第一作者简介:刘 军(1952—),男,山东济宁人,河南农业大学机电工程学院教授,硕士研究生导师,研究方向:机电一体化技术、数控技术和CAPP 。
Email:liujunshd@sina .com 。
温度作为一个基本物理参量,在表征系统的内部状态方面有着重要的意义。
因此,温度控制在国民经济的各个部门中也有着十分广泛的应用。
在这些应用中,有些场合(比如烤烟)要求温度的变化要遵循一定的工艺曲线,这就要求相应的温度控制系统要能够实时获得温度信息并施行实时控制。
目前该领域得到了相当广泛的关注,成为单片机应用领域的研究热点之一[1,2]。
本文在借鉴现有各类单片机温度控制系统的基础上,尝试设计一个中档通用单片机温度控制系统,该系统采用基于模糊的P I D 方法作为控制算法,采用C8051F020单片机作为控制核心。
模糊单片机控制电饭煲.(肖凡制作1588)
模糊单片机控制电饭煲摘要:介绍用新型HT46R47型单片机和模糊控制技术实现的电饭煲。
他具有电路简单、成本低廉、节省能源、安全可靠目前,市场上的电饭煲大部分采用固定功率的方式加热,能源利用率低、功能单一,难以满足人们的日益增长的生活需求。
开发功能齐全、成本低廉、节省能源、安全可靠的微电脑电饭煲,是非常有必要的。
系统选用以低成本、功耗小、性能良好的8位A/D型HT46R47单片机为控制核心的控制电路。
引脚如图1所示。
他的主要特性如下:·工作电压:fSYS=4MHz:2.2~5.5V;·13位双向输入/输出口;·8位带溢出中断的可编程定时/计数器,具有7级预分频器;·石英晶体或RC振荡器;·看门狗定时器;·2048×14位的程序存储器PROM;·64×8位的数据存储器RAM;·在VDD=5V且系统时钟为8MHz时,指令时钟为0.5μs;·四通道9位的A/D转换器;·指令执行时间皆为1或2个指令周期低电压复位功能。
关键词:单片机;模糊逻辑;电路设计;抗干扰;温度采样;电饭煲Fuzzy control electric cookerAbstract:Introduction of new type HT46R47single-chip microcomputer and fuzzy control technology to realize the electric rice cooker.He has the advantages of simple circuit,low cost,energy saving,safety and reliability.Single chip microcomputer;fuzzy logic;circuit design;interference;temperature sampling; electric cookerAt present,the market of electric cooker used most of fixed power heating,low energy efficiency,single function,difficult to meet people's growing demand for life. Development of complete function,low cost,energy saving,safe and reliable computer electric cooker,is very necessary.System selection with low cost,low power consumption,high performance8bit A/D HT46R47single-chip microcomputer to control the core control circuit.Pin as shown in figure1.His main characteristics are as follows:Working voltage,:fSYS=4MHz:2.2~5.5V;,13bidirectional input/output port;In8,with overflow interrupt the programmable timer/counter,with7prescaler; Quartz crystal oscillator,or RC;,the watchdog timer;"2048x14bit program memory PROM;"64x8bit data memory RAM;In VDD=5V and system clock for8MHz,0.5s instruction clock;In four,channel9bit A/D converter;Keywords:Single chip microcomputer fuzzy logic circuit design interference temperature sampling electric cooker目录模糊单片机控制电饭煲 (1)Fuzzy control electric cooker (2)前言 (4)第一章单片机的工作原理 (5)1.1特殊功能寄存器(SFR) (5)1.2程序状态字寄存器(PSW) (6)1.3MCS-51单片机存储结构 (7)第二章模糊电饭锅的工作原理 (8)2.1吸水阶段 (8)2.2加热阶段 (9)2.3沸腾阶段 (9)2.4焖饭阶段 (9)2.5膨胀阶段 (9)2.6保温阶段 (9)第三章电饭锅模糊控制器的设计 (10)3.1.模糊电饭锅的基本功能 (10)3.2模糊控制的硬件设置 (10)3.2.1.电源电路 (11)3.2.2.检测信号的电路 (11)3.2.3.显示电路 (12)3.2.4.加热控制电路 (12)3.3.模糊控制的软件设计 (12)3.3.1系统初始化 (12)3.3.2参数设定 (12)3.3.3.工艺推理及过程控制 (13)第四章模糊控制算法 (15)4.1模糊控制的基本原理 (15)4.2米量的模糊推理 (16)4.3加热功率的模糊推理 (18)4.4工艺过程控制 (20)参考文献 (22)致谢 (23)前言系统选用以低成本、功耗小、性能良好的220v8位A/D型HT46R47单片机为控制核心的控制电路。
项目七 单片机综合实践

达成目标
技能目标
能根据需要,完成单片机应用系 统的设计
素质目标
弘扬脚踏实地、刻苦钻研、爱岗敬业的劳模精神 树立技能成才、技能报国的人生理想 加强实践练习,注重学思结合、知行统一,增强
勇于探索的创新精神
项目导航
任务7.1 设计数字温度计——DS18B20的应用 任务7.2 设计数字钟——DS1302的应用
2.温度传感器
DS18B20中的温度传感器可完成对温度的测量,温度值以16位符号扩展 的二进制补码读数形式提供,以0.062 5℃/LSB形式表达。在12位转换情况 下,温度的高低字节存放形式如表所示,其中S为符号位。
低字节
23
22
21
20
2−1
2−2
2−3
2−4
高字节
SSSS
S
26
25
24
高字节的前5位是符号位,如果测得的温度大于0,则这5位为0,只要将测到的 数值乘以0.062 5即可得到实际温度;如果测得的温度小于0,则这5位为1,测到 的数值需要取反加1再乘以0.062 5才能得到实际温度。
7.1.2 DS18B20简介
DS18B20是单总线数字温 度传感器,采用单总线的接口 方式,即与单片机连接时仅需 要一根数据总线即可实现双向 通信。由于DS18B20传输信息 仅需要一根数据总线,因而使 用DS18B20可使系统结构更趋 简单,可靠性更高。
DS18B20的引脚排列如图所示。
7.1.2 DS18B20简介
7.1.3 DS18B20的内部结构及主要功能部件
触发器就像我们工作中的警戒线一样, 不能触及,因此我们平时要学会进行自我约 束。人在任何时候都要进行自我约束,没有 自我约束力,就削弱了前进的动力。在人生 道路上,我们要不断学习自我约束,提高自 己的自律意识,谨慎对待自己的一言一行。
1v4[通信电子]tinyarm_yingjian
![1v4[通信电子]tinyarm_yingjian](https://img.taocdn.com/s3/m/3e3391f75ff7ba0d4a7302768e9951e79b8969e9.png)
TinyARM T23硬件说明手册广州致远电子有限公司类别 内容关键词 TinyARM T23、嵌入式工控模块摘 要讲解TinyARM T23外部硬件电路的设计方法ARM 嵌入式工业控制模块修订历史版本日期原因V1.00 2008/04/12 创建文档V1.01 2008/04/24 补充部分硬件说明内容硬件手册 ©2008 Guangzhou ZHIYUAN Electronics CO., LTD.共21页硬件手册 ©2008 Guangzhou ZHIYUAN Electronics CO., LTD.共21页销售与服务网络(一)广州周立功单片机发展有限公司地址:广州市天河北路689号光大银行大厦12楼F4 邮编:510630 电话:(020)38730916 38730917 38730972 38730976 38730977 传真:(020)38730925 网址:广州专卖店地址:广州市天河区新赛格电子城203-204室 电话:(020)87578634 87569917 传真:(020)87578842南京周立功地址:南京市珠江路280号珠江大厦2006室 电话:(025)83613221 83613271 83603500 传真:(025)83613271北京周立功地址:北京市海淀区知春路113号银网中心712室 (中发电子市场斜对面)电话:(010)62536178 62536179 82628073 传真:(010)82614433重庆周立功地址:重庆市石桥铺科园一路二号大西洋国际大厦(赛格电子市场)1611室 电话:(023)68796438 68796439 传真:(023)68796439杭州周立功地址:杭州市登云路428号浙江时代电子市场205号电话:(0571)88009205 88009932 88009933 传真:(0571)88009204成都周立功地址:成都市一环路南二段1号数码同人港401室(磨子桥立交西北角)电话:(028)85439836 85437446 传真:(028)85437896深圳周立功地址:深圳市深南中路 2070号电子科技大厦A 座24楼2403室电话:(0755)83781788(5线) 传真:(0755)83793285武汉周立功地址:武汉市洪山区广埠屯珞瑜路158号12128室(华中电脑数码市场)电话:(027)87168497 87168297 87168397 传真:(027)87163755上海周立功地址:上海市北京东路668号科技京城东座7E 室 电话:(021)53083452 53083453 53083496 传真:(021)53083491西安办事处地址:西安市长安北路54号太平洋大厦1201室 电话:(029)87881296 83063000 87881295 传真:(029)87880865硬件手册 ©2008 Guangzhou ZHIYUAN Electronics CO., LTD.共21页销售与服务网络(二)广州致远电子有限公司地址:广州市天河区车陂路黄洲工业区3栋2楼 邮编:510660 传真:(020)38601859 网址: (嵌入式系统事业部) (工控网络事业部) (楼宇自动化事业部)技术支持: CAN-bus :电话:(020)22644381 22644382 22644253 邮箱:****************************iCAN 及模块:电话:(020)28872344 22644373 邮箱:*********************ARM 工控板:电话:(020)28872684邮箱:******************************以太网及无线:电话:(02 0)22644385 22644386 邮箱:************************* *********************************编程器:电话:(020)38681856 28872449 邮箱:*************************分析仪器:电话:(020)22644375 28872624 28872345 邮箱:********************ARM 嵌入式系统:电话:(020)28872347 28872377 22644383 22644384 邮箱:**********************楼宇自动化:电话:(020)22644376 22644389 邮箱:************************ *************************销售:电话:(020)22644249 22644399 28872524 28872342 28872349 28872569 28872573维修:电话:(020)22644245目录1. 适用范围 (1)2. 系统硬件设计 (2)2.1 TinyARM最小系统 (2)2.2 电源电路 (3)2.3 复位系统与ISP电路 (5)2.4 调试端口设计 (5)2.5 UART接口设计 (6)2.6 I2C接口设计 (8)2.7 SSP接口设计 (10)2.8 模拟量输入 (11)2.9 开关量输入与输出 (11)2.10 SD/MMC总线接口电路 (12)2.11 以太网接口电路设计 (13)2.12 USB Device接口电路设计 (14)2.13 CAN总线接口电路 (14)3. 声明 (16)硬件手册©2008 Guangzhou ZHIYUAN Electronics CO., LTD.共21页1. 适用范围本手册是TinyARM T23系列嵌入式工控模块的硬件说明手册,适用于T2365I、T2366I、T2367I、T2368I、T2387I五个型号的外部硬件电路的设计。
NLX230型模糊控制器及其嵌入式应用研究

摘 要 :美 国 N ua oi 司的单 片 集成 N X 3 e rL g x公 L 2 0型模 糊控 制 器是 一种 可编程 的超 大规模 模 糊逻 辑
处理 器 。 处理 速 度 高达 3M 规 则/ , 0 秒 可广 泛应 用于过 程 嵌入 式控 制 、 式 匹配 、 工 智 能 、 器人 模 人 机 及 专家 系统 等 。 中介 绍 N X20的逻辑设 计特 点 、 文 L 3 工作 原理 、 内部结 构特 性 、 工作模 式和 应 用接 口
的接 口电路 、 与外 接 E P O 的接 口电路 和 晶体振 ER M
线性对称隶属 函数或最简单 的最大/ 最小模糊参考 方法。规则决定 了在输入时所需的状态集 。 每一规
则 至 多包 含 1 项 , 1个 项 与 1 “ 晰 ” 入/ 6个 每 个 清 输 模 糊隶 属 函数 配对 。1 当前值 是对 用 户在 某 一规 个 则 ‘ 的输 出 值 合 计 的修 改 。对 于 所 有 的输 入 和 输 1 r
Fu z o t olrNLX2 0 a d ise b d e p l a in su y zyc nr l e 3 n t m e d d a p i to t d c
HUANG Xi o l a —i n
( eat etfEet n s o muiao nier gHu e A t oi n ute ntu ,h a 4 0 2 C i ) D p r n lc o i &C m n t nE gnei , b i o t eId s i Is t S i n4 2 0 ,hn m o r c ci n u m v rs h e y a
Ke o d : zylg ;fzyc nrl r L 2 0 it aed s ;e b d e p l a o yw r sf z i u o c uz o t l ;N X 3 ; ne c ei o e f r n g m ed da pi t n ci
nl 型模煳控制器及其嵌入式应用研究

NLX230型模糊控制器及其嵌入式应用研究1 引言在自动控制领域,模糊控制理论及其应用的研究取得了很大的进展,美国NeuraLogix公司推出的NLX230型单片模糊控制器是一种可编程的超大规模集成模糊逻辑微处理器FMC (Fuzzy Micro Controller),根据模糊逻辑原理对输入条件进行模糊逻辑运算,得到最优的动作,通过执行并行操作控制输出,其处理速度高达30M规则/秒,具有与计算机的接口电路、与外接EEPROM的接口电路和晶体振荡器接口电路,可广泛应用于过程嵌入式控制、模式匹配,人工智能,机器人及专家系统。
2 NLX230的设计特点与工作原理模糊逻辑在控制领域的应用原理是利用模糊逻辑器件通过"项"和"规则"去构造任意复杂的线性和非线性函数,再根据输入状态经过模糊推理,找到最佳的输出动作值并应用于控制过程,从而使模糊逻辑获得类似于人类专家似然推理的能力。
NLX230基于条件用模糊逻辑规则计算出优化的输出操作。
输入值在用户定义的隶属函数中按适合的程度排序。
为了实施有效的数字化,采用1个线性对称隶属函数或最简单的最大/最小模糊参考方法,规则决定了在输入时所需的状态集,每一规则至多包含16个项,每1个项与1个"清晰"输入/模糊隶属函数配对。
1个当前值是对用户在某一规则下的输出值合计的修改。
对于所有的输入和输出,输入排序与规则处理是并行的。
单片式24位宽的规则存储器最多可存64个规则,所有输入都可共享这些规则。
根据需要每个输出可以被编程为最多用64个规则,任一个输出所用的规则个数是其他规则所用的规则的剩余数。
模糊逻辑原理的高效数字化实现使NLX230在低价格下获得高处理速度(30M规则/秒)。
2.1 距离测量的相似判决原理NLX230型单片模糊集成控制器利用模糊逻辑元件将输入与隶属度函数结合起来,确定输入对于被选定的隶属函数中心值的距离,通过距离测量进行相似决策。
基于模糊控制的节水灌溉控制系统及其单片机实现
硬件设备102基于模糊控制的节水灌溉控制系统及其单片机实现◆班冰冰摘要:我国是水资源比较丰富,总量位居世界前列,但是人均占有量却远远低于世界平均水平。
从某种程度来说我国水资源比较匮乏。
当前,灌溉系统自动化的水平较低已经成为了我国农业水资源高效利用的绊脚石。
[1]在以色列、日本、美国这些发达国家地区,自动化灌溉已经得到了普及。
在传感器的帮助下,水灌溉已经由传统的充分灌溉过渡到非充分灌溉,传感器不仅可以检测土壤水含量,还可以监测土壤的墒情和农作物的生长,真正做水资源的智能化控制。
要想发展农业现代化就必须提高水资源利用率,实现高效农业和精细农业。
仅凭一项节水灌溉是无法实现农业现代化,还应当考虑到水资源的开发、输送、灌溉技术等,这些方面都会应当到对水资源的合理利用。
关键词:单片机;模糊控制;节水灌溉;通信1 模糊控制算法的设计模糊控制算法也称为模糊控制规则,实质上就是指操作者在操作过程中从实践经验中总结出一条条模糊的条件,这些条件构成了一个集合,这个集合也是整个控制系统的中心。
在模糊控制系统中,模糊控制器主要有以下几种。
1.1 单输入举输出模糊控制器这类输入和输出均为一维的模糊控制器,其控制规则通常由如下模糊条件语句来描述。
If A then BIf A then B else C1.2 多输入单输出模糊控制器其控制规则通常由如下模糊条件语句来描述。
If A and B and … and N then U 1.3 双输入多输出模糊控制器这类模糊控制器的控制规则可由一组模糊条件语句来描述。
If E and EC then U And if E and EC then V And … … …And if E and EC then W1.4 双输入单输出模糊控制器。
目前,在实际的应用中,主要采用的是双输入单输出的模糊控制,这种方法能够在很大程度上保证整个系统的稳定性,能够在一定程度上减少超调量和振荡现象,其精度也能够达到相应的要求。
基于单片机的双模糊温度控制器设计
6- 4
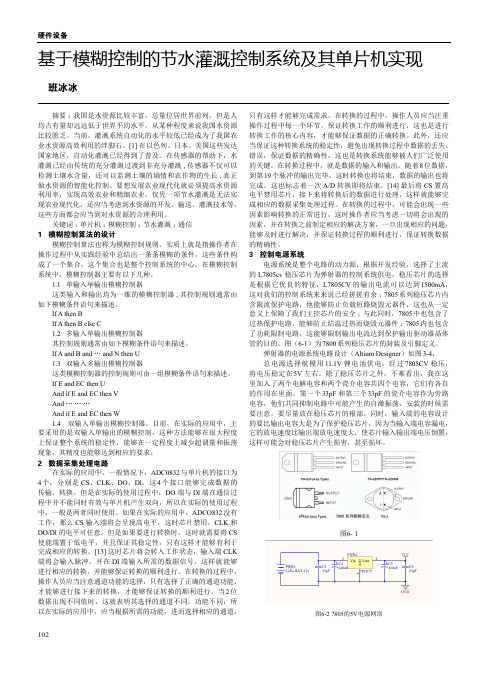
行 比较 [ 模糊 控 制 器 输 出控 制 量 通 过 P . 出 , 2 1 。 1 O输 通过 光 电双 向可 控 硅 驱 动 器 MO 35 去 驱 动 功 率 可控 硅 ,从 而 改 变 加 C01 热 元 件 的加 热 功 率 , 以实 现 温 度 调 节 的 目的 。 考 虑 到 系 统 的 人 机 互 动 , 用 并 行 接 口芯 片 85 利 15进 行 I / 0 口扩 展 , 以完 成 键 盘输 入 及 显 示 器 输 出 的设 计 。其 中键 盘 采用 矩 阵 式 键 盘 , 责 参 数 的设 定 和一 些 开 关 量 的 输 人 , : 负 如 启动、 止 、 位 、 度设 定 、 定值修改 、 度数字键 等 ; 停 复 温 设 温 而
a d a s a e t eh r wae a d s f r e i n i e sa d me h d f h mp r t r o tolr. h o t l ri s l. u n log v a d r n ot ed sg a n t o so e t h wa d t e e au ec n r l e T ec nr l i e b t o e s mp i c ne fci ey i r v et mp r t r o t l e o ma c n esa i t f h mp r t r o t l t a f t l e v mp o et e e a u ec n r r r n ea d t tb l y o et h op f h i t e e a u ec n r , o Ke r s o b e f z y c n rl y wo d :d u l u z o to ;MCU;tmp rt r o t l o t ls a e y e e au ec n r ;c nr t t g o o r
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
8 j^ 位 自
DI - 7 O DI
8 轱出 位
D 0 D07
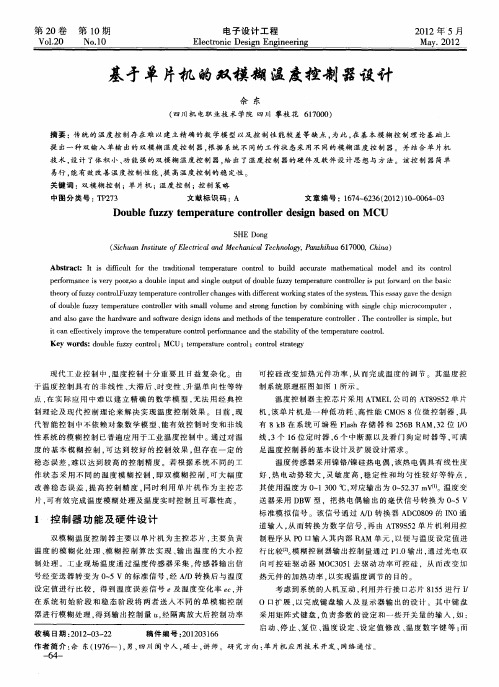
图 l NL 2 0结柯 X3
13 输 出寄存 器 、 则寄存器 规
模糊化器相连。因此 , 每个模糊纯郝可 以从 8位 的外 部信号任选一位输入 , 完成对输入信号的模糊化过程 。
NX3 L 2 0中有 1 个模糊化器 , 6 一次最多可求取 l 个模 6
维普资讯
《 驯控技 术}o2年第 2 卷第 1 2o 1 期
文章 编号 :0 一 89 20 ) 】一 OO一 2 1O 8 2 (02 0 O6 0
模糊单片机 N X 3 L 20及其接 口软硬件设计
Bu— CM( X 3 )a dteDe ino tr c lr S NL 2 0 n sg f nef e h I a
糊量 。
收稿 日期 : 0 — 2—1 2 1 0 0 6 作者 简介 : 杨钰 (9 7 ) 男 , 17 一 . 南京航 空航天大 学毕业 , 助教 , 主 要 从事测控技 术与计量研究。
规则寄存器用于存放控制规则 , L 20最 多可 N X3 存放 6 条规则。输出寄存器用于存放作用值 , 4 作用值 对输出值的修改采用累加法 , 即输 出值等 于即时作用 值与上次输出值相加
接口
1 6
+ 竺 l
最 大 比 较 器
PO R M接口电路和振 荡接 口电路 , 通过这 些接 口, 可 以和外部计算机进行有关信息的传递 , 能够完成对温 度 、 移 等参量 的精确控 制 。 位
个
模 糊
化
器
输 出 寄 存 器
1 NX 3 I 2 0的 结构 特 点
2 接 口设 计
NX3 L 20有两种工作方式 : 主动方式 ( L 2 0自 NX3 动从外部 EP O 中读 取 数 据 )从 动 方 式 ( I 20 R M 、 N. 3 X 等待外部逻辑电路来读写数据) 图 2是 N X 3 工作 , L20 在主动方 式 时的接 口框 图。 电话 :00 6 62 1 。582 1 4 7 (1 )588 16 669 - 1 8
( L 2 0 T n oue ,n h ne aeo te L 2 0 N X 3 )a t d cd a dteit c fh X 3 ei r f r N ad i o w r A S 3 ) r ecie . n t s a s f e( D 2 o aed sr d t d
Ke r s NL 3 ; y wo d : X2 0 ADS 3 ; l rn ; l f o o i g 2 0 bui g r eo m n n o c
( 军第一航空学院检测与计量教研室, 信阳 44 0 杨 钰 ,张志 祥 空 河南 6o ) 0
摘要 : 简单 夼 绍 了模 糊 单 片机 N X 3 L 2 0的 结构 及 其 特
点 , 述 了 N X 3 的 典 型 接 口 及 其 开 发 软 件 描 L20
A DS 3 2 0。
12 最 小 比较器和 最大 比较器 . 最 小 比较器 是一个 神 经 网络 , 以根 据 规则 寄存 可 器置… ’ 将相应的模糊化器的输出进行高速 比较, 1 位, 求出最小值 , 作为最小比较器的结果输 出, 即每条控制 规则前件产生的最小值作为输出结果。最大比较器对 每条规则前件产生的最小值进行 比较 , 求出其 中的最 大值 , 这就 是模 糊 逻辑 最 小 最大 推 理结 果 。含最 大 值 的控制规 则 的后 件 的模糊 量 就 是 推理 结 果 的模 糊 量 ( 由于后件的模糊 量实质是单点 , 取值范围是 一 2 ~ 18 17 相 当于完成了反模糊化 的过程 ) 故称之为作用 2, ,
值。
关键 词 : L 2 0; D 2 0 模 糊化 ; 制规 则 N X 3 A S3 ; 控 中图 分类号 :P 6. T 38 1 文 献标 识码 : B
Ab ta t T e s u t r n h r ce si ft e b u . C sr c : h t cu e a d c a a tf t o l r M r i c h S
北京瑞赛科技有限公司片机 N X 3 L 2 0及其 接 口软硬 件设 计
6 1
工作过 程: 首先 , L 20送出 串行 时钟信 号 S NX 3 K 作为外部 E P O R M的时钟信号; 接着送出片选信号 c s 选 中 EP O EP O 中存储 的是模糊控 制器 的控 R M( R M 制规 则 )然后 , 串行 数据 输 出端 D ; 从 O送 出一个 读 标 志和7位的地址 , 并从 E P O 中读出对应地址 中的 R M 1 内容送 入 串行 输 入 D 端 , 时 , 6位 I 此 片选 信 号 c s变 负, 接着变正 。依次类推 , 直至 EP O 中的 16 R M 9 个数 据被 读 入 N X 3 L 20中 , N X 3 即 L 20的结 构配 置 过程 结 束 此时 ,L 2 0 以通过数据输入端 DO I NX 3 可 I ~D7接 收外部信号或反馈信号 , 按照配置 的控制规则进 行数 据的模糊处理 , 由数据输出端 D l一 O C D 7输出控制信 0
NX3 L 2 0是美 国 NuaLs er oi 司模 糊单 片 机 系列 c公 的一 种 基本 型号 , 采用 12 m C S0脚 DP封 装 , .5 MO 4 I 具有 很强 的模糊 逻辑处 理 能力 , 行 处理 速 度达 30 并 00 万条/ 规 则 它有和 外部计 算 机的接 口电路 、 s 外部 E