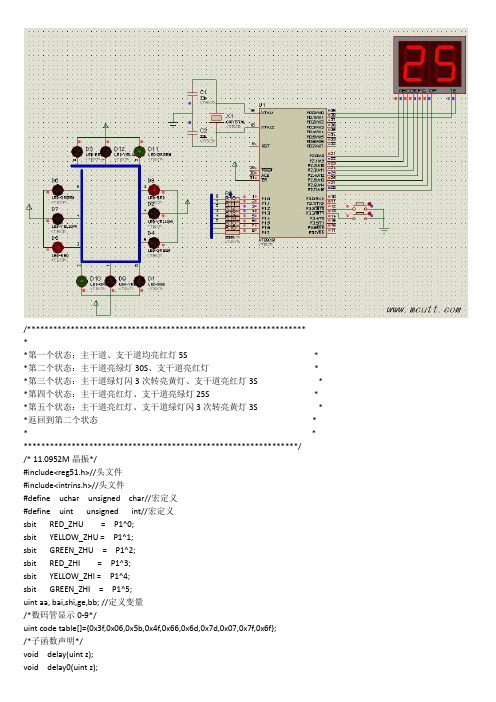
51单片机控制交通灯原理图及C语言程序
51单片机的交通灯c程序

#include<reg52.h>#define uint unsigned int#define uchar unsigned charchar TAB[11]={0x5f,0x44,0x9d,0xd5,0xc6,0xd3,0xdb,0x45,0xdf,0xd7,0x00}; //数码管状态表void delay_100ms(uint );void delay(uint );void display(uint );void yejian(void);int i,k,t,flag=0;sbit A1=P1^0;sbit A2=P1^1;sbit A3=P1^2;sbit A4=P1^3;sbit SB=P3^7;void main () //主程序{EA=1;//初始化,开所有中断ET1=1;//开定时器T1中断TMOD=0x10;//设置定时器工作方式2TH1=(65536-50000)/256;//设置定时器初值TL1=(65536-50000)%256;while(1){if(SB==0) flag=1;if(flag==1) yejian();P2=0x69;k=8;while(k>0)//状态1南北红灯,东西绿灯{if(SB==0) flag=1;if(flag==1) yejian();TR1=1;//开启T1while(t!=10) display(k); //显示倒计时if(t==10) t=0;k--;TR1=0;//关闭T1}if(k==0) k=3;while(k>=0)//状态2南北红灯,东西绿灯闪烁三次{if(SB==0) flag=1;if(flag==1) yejian();P2=0x69;delay_100ms(5);P2=0x41;delay_100ms(5);k--;}k=2;flag=1;while(k>=0)//状态3南北红灯,东西黄灯{if(SB==0) flag=1;if(flag==1) yejian();P2=0x7d;delay_100ms(10);k--;}P2=0x96;k=8;while(k>0)//状态4南北绿灯,东西红灯{if(SB==0) flag=1;if(flag==1) yejian();TR1=1;//开启T1while(t!=10) display(k);// 显示倒计时if(t==10) t=0;k--;TR1=0;//关闭T1}k=3;while(k>=0)//状态5东西红灯,南北绿灯闪烁三次{if(SB==0) flag=1;if(flag==1) yejian();P2=0x96;delay_100ms(5);P2=0x14;delay_100ms(5);k--;}k=2;while(k>=0)//状态6东西红灯,南北黄灯{if(SB==0) flag=1;if(flag==1) yejian();P2=0xd7;delay_100ms(10);k--;}}}void yejian(void){uint m=k;while(flag==1){if(SB==1) flag=0;k=11;P2=0xff;delay_100ms(5);P2=0x00;delay_100ms(5);}k=m;}void delay_100ms(uint z)//显示数码管延时100ms {TR1=1;//开启T1while(t!=z) display(k);if(t==z){t=0;TR1=0;//关闭T1}}void exter0() interrupt 3//定时器中断程序{TH1=(65536-50000)/256;TL1=(65536-50000)%256;t++;}void display(uint i)//倒计时显示{A1=A2=A3=A4=0;A4=1;P0=TAB[i];//显示第一位数值delay(4);A4=0;A3=1;P0=TAB[i];//显示第二位数值delay(4);A3=0;A2=1;P0=TAB[i];//显示第三位数值delay(4);A2=0;A1=1;P0=TAB[i];//显示第四位数值delay(4);A1=0;}void delay(uint z)//软件延时{uint x,y;for(x=z;x>0;x--)for(y=110;y>0;y--);}。
51单片机设计交通灯仿真图
}
void init1()//第一个状态:主干道、支干道均亮红灯5S
{
uint temp;
temp=6;//变量赋初值
TMOD=0x01;//定时器0工作于方式1
TH0=0x4c;
TL0=0x00;//定时器赋初值
EA=1;//开外部中断
ET0=1;//开定时中断
TR0=1;//开定时器0
while(1)
#define uchar unsigned char//宏定义
#define uint unsigned int//宏定义
sbit RED_ZHU = P1^0;
sbit YELLOW_ZHU = P1^1;
sbit GREEN_ZHU = P1^2;
sbit RED_ZHI = P1^3;
sbit YELLOW_ZHI = P1^4;
delay0(5);
}
void xint0() interrupt 0 //外部中断0,这里用2是INT1的优先级为0
{
LED_ON();
}
void LED_ON()//外部中断0显示子程序
{
RED_ZHI=0;
RED_ZHU=0;
GREEN_ZHI=1;
GREEN_ZHU=1;
YELLOW_ZHI=1;
}
/*********************************************************
500ms延时函数
晶振:11.0592MHz
*********************************************************/
void delay(unsigned char j)
基于80C51单片机的交通灯C语言源程序
#include <reg51.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned intsbit SH_CP=P2^0;sbit DS=P2^1;sbit ST_CP=P2^2;uchar temp;uchar code DSY_CODE[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff}; void NB_tong();void DX_tong();void NBY_show();void DXY_show();sbit RED_A=P1^0;//A代表NB南北sbit YELLOW_A=P1^1;sbit GREEN_A=P1^2;sbit RED_B=P1^3;//B代表DX东西sbit YELLOW_B=P1^4;sbit GREEN_B=P1^5;sbit K1=P3^0;sbit K2=P3^1;sbit K3=P3^3;sbit SPK=P3^7;//蜂鸣器uchar time=0,Count=0;//--------------------------------//延时//--------------------------------void DelayMS(uint x){uchar t;while(x--) for(t=0;t<120;t++);}//---------------------------------------//74HC595的驱动//---------------------------------------void In_595(){uchar i;for(i=0;i<8;i++){temp<<=1;DS=CY;SH_CP=1;_nop_();_nop_();SH_CP=0;}void Out_595(){ST_CP=0;_nop_();ST_CP=1;_nop_();ST_CP=0;}//---------------------------------------//T0定时器定时及各种情况下灯亮的调用//---------------------------------------void Timer0() interrupt 1{TH0=(65536-50000)/256;TL0=(65536-50000)%256;Count++;time=time%60;if(Count==20){time++;Count=0;}if(time<=30) NB_tong();if((time>30)&&(time<=35)) NBY_show();if((time>35)&&(time<=55)) DX_tong();if((time>55)&&(time<=60)) DXY_show();}//------------------------------------//按键处理//------------------------------------void EX_INT0() interrupt 0{if(K1==0) //K1按下强制NB南北通行,倒计时黑屏暂停;断开继续以前动作。
51单片机交通灯设计.
摘要交通信号灯是交通信号中的重要组成部分,是道路交通的基本语言,是为了加强道路交通管理,减少交通事故的发生,提高道路使用效率,改善交通状况的一种重要工具。
适用于十字、丁字等交叉路口,由道路交通信号控制机控制,指导车辆和行人安全有序地通行。
交通信号灯由红灯(表示禁止通行)、绿灯(表示允许通行)、黄灯(表示警示)组成。
分为:机动车信号灯、非机动车信号灯、人行横道信号灯、车道信号灯、方向指示信号灯、闪光警告信号灯、道路与铁路平面交叉道口信号灯。
近年来随着科技的飞速发展,单片机的应用正在不断深入,同时带动传统控制技术日益更新。
接下来将介绍基于单片机控制的交通信号灯的自动指挥系统。
交通信号灯控制方式很多。
本系统采用MSC-51系列单片机80C51和芯片74LS245为中心器件来设计交通灯控制系统。
、关键字:单片机,信号灯,控制前言道路交通信号灯是交通安全产品中的一种类别,是为了加强道路交通管理,减少交通事故的发生,提高道路使用效率,改善交通状况的一种重要工具。
适用于十字、丁字等交叉路口,由道路交通信号控制机控制,指导车辆和行人安全有序地通行。
最早的时候只有红、绿两种颜色,后来经过改良后,增加了一盏黄色的灯,红灯表示停止,黄灯表示准备,绿灯则表示通行。
之所以采用这三种颜色,一方面是三原色,其他颜色也是在此基础上调出来的,另一方面,用这三种颜色作为交通讯号也和人们的视觉结构和心理反应有关。
人的视网膜含有杆状和三种锥状感光细胞,杆状细胞对黄色的光特别敏感,三种锥状细胞则分别对红光、绿光及蓝光最敏感。
由于这种视觉结构,人最容易分辨红色与绿色。
虽然黄色与蓝色也容易分辨,但因为眼球对蓝光敏感的感光细胞较少,所以分辨颜色,还是以红、绿色为佳。
交通信号灯是交通信号指挥中的重要组成部分,是道路交通的基本语言。
交通信号灯由红灯(表示禁止通行)、绿灯(表示允许通行)、黄灯(表示警示)组成。
分为:机动车信号灯、非机动车信号灯、人行横道信号灯、车道信号灯、方向指示信号灯、闪光警告信号灯、道路与铁路平面交叉道口信号灯。
基于51单片机控制交通灯的电路图与C语言程序

}
p2=0x12; //南北黄灯闪烁三秒,以提醒行人注意
p3=0x12;
p1=display[3];
delay_long(8000,1);
p2=0x00;
p3=0x00;
p3=0x12;
p1=display[1];
delay_long(8000,1);
p2=0x00;
p3=0x00;
delay_long(14000,1); //南北黄灯闪烁三秒完毕
}
void main() //主函数入口处
delay_long(14000,1);
p2=0x12;
p3=0x12;
p1=display[2];
delay_long(8000,1);
p2=0x00;
p3=0x00;
delay_long(14000,1);
p2=0x12;
东西道为人行道(20秒),南北道为车行道(60秒),黄灯延时最后三秒时,闪烁并切换。
三、硬件电路设计
此电中路设计采用AT89C51单片机,74LS47(数码管驱动)74LS373(数码管驱动输出锁存),8个数码管显示其延时值,四个红、黄、绿指示灯。硬件设计关键在于,延时显示时,要考虑到当个位数字显示时,要确保十位数字显示输出的不变。因此,可加输出锁存器。在延时最后三秒时,要让黄灯进行闪烁,并同时显示数字(这一步在软件设计上很关键)。
p2=0x12; //南北黄灯闪烁三秒,以提醒行人注意
p3=0x12;
p1=display[3];
delay_long(8000,1);
p2=0x00;
p3=0x00;
else
51单片机用C语言实现交通灯_红绿灯_源程序
c o d eu n s i g n e dc h a rt a b [ ] = { 0 x 3 f , 0 x 0 6 , 0 x 5 b , 0 x 4 f , 0 x 6 6 , 0 x 6 d , 0 x 7 d , 0 x 0 7 , 0 x 7 f , 0 x 6 f } ; / / 共阴数码管 0 9 u n s i g n e dc h a rD i s _ S h i w e i ; / / 定义十位 u n s i g n e dc h a rD i s _ G e w e i ;/ / 定 g n e di n tc n t ) { w h i l e ( c n t ) ; } m a i n ( ) { T M O D| = 0 x 0 1 ; / / 定时器设置 1 0 m si n1 2 Mc r y s t a l 定时器 0 ,工作方式 1 ,1 6 位定时器 T H 0 = 0 x d 8 ; / / 6 5 5 3 5 1 0 0 0 0 = 5 5 5 3 5 = D 8 F 0 (十六进制) T L 0 = 0 x f 0 ; I E =0 x 8 2 ;/ / 中断控制,E A = 1 开总中断,E T 0 = 1 :定时器 0 中断允许 T R 0 = 1 ; / / 开定时器 0 中断 P 1 = 0 x f c ; / / 红灯亮,根据红黄绿接灯的顺序。 r e d= 1 ; w h i l e ( 1 ) { P 0 = D i s _ S h i w e i ; / / 显示十位,这里实现用 8 位数码管,即左 1 位 P 2 = 0 ; d e l a y ( 3 0 0 ) ; / / 短暂延时 P 0 = D i s _ G e w e i ;/ / 显示个位,左数,2 位 P 2 = 1 ;
51单片机用C语言实现交通灯
51单片机用C语言实现交通灯51 单片机用C 语言实现交通灯(红绿灯)源程序交通灯,红黄绿灯交替亮,怎样实现呢?其实就是根据单片机定时器及倒计时的程序修改。
源程序如下:#include bit red,green,yellow,turnred; //定义红、黄、绿及转红标志code unsigned char tab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};//共阴数码管0- 9unsigned char Dis_Shiwei;//定义十位unsigned char Dis_Gewei; //定义个位void delay(unsigned int cnt) //用于动态扫描数码管的延时程序{while(--cnt);}main() {TMOD |=0x01;//定时器设置10ms in 12M crystal 定时器0,工作方式1,16 位定时器TH0=0xd8; //65535-10000=55535=D8F0(十六进制)TL0=0xf0;IE= 0x82; //中断控制,EA=1 开总中断,ET0=1:定时器0 中断允许TR0=1; //开定时器0中断P1=0xfc;//红灯亮,根据红黄绿接灯的顺序。
red =1;while(1) {P0=Dis_Shiwei;//显示十位,这里实现用8 位数码管,即左1 位P2=0;delay(300); //短暂延时P0=Dis_Gewei; //显示个位,左数,2 位P2=1;delay(300);}}void tim(void) interrupt 1 using 1{static unsigned char second=60,count; //初值60TH0=0xd8;//重新赋值,10 毫秒定时TL0=0xf0;count++;if (count==100) {count=0;second--;//秒减1if(second==0){ //这里添加定时到0 的代码,可以是灯电路,继电器吸合等,或者执行一个程序if(red) //红灭,先转黄{red=0;yellow=1;second=4;P1=0xF3;//黄灯亮4 秒,黄灯为过渡灯,再根据情况转绿或转红}else if(yellow && !turnred){yellow=0;green=1;second=25;P1=0xCF;// 绿灯亮25 秒,}else if(green){yellow=1;green=0;second=4;P1=0xF3;//黄灯亮4 秒turnred=1;}else if(yellow && turnred) //绿灯灭,转黄灯,后红灯,turnred=1 时{red=1;yellow=0;P1=0xFC;//红灯亮60 秒second=60;turnred=0; //接下来是转黄,绿。
51单片机控制交通灯原理图及C语言程序
Proteus仿真原理图:Keil C源程序:#include<reg51.h>#define uchar unsigned char#define uint unsigned intsbit RED_DONGXI = P1^0;//南北方向红灯亮sbit YELLOW_DONGXI = P1^1;//南北方向黄灯亮sbit RED_NANBEI = P1^3;//东西方向红灯亮sbit GREEN_DONGXI = P1^2;//南北方向绿灯亮sbit YELLOW_NANBEI = P1^4;//东西方向黄灯亮sbit GREEN_NANBEI = P1^5;//东西方向绿灯亮sbit DXweixuan1 = P1^6;//南北方向数码管位选1sbit DXweixuan2 = P1^7;//南北方向数码管位选2sbit NBweixuan1 = P3^0;//东西方向数码管位选1sbit NBweixuan2 = P3^1;//东西方向数码管位选2sbit L1=P3^5;sbit L2=P3^6;sbit L3=P3^7;uint aa, bai,shi,ge,bb;uint shi1,ge1,shi2,ge2;uint code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; uint code table1[]={0xfc,0x60,0xda,0xf2,0x66,0xb6,0xbe,0xe0,0xfe,0xf6};void delay(uint z);void init(uint a);void display(uint shi1,uint ge1,uint shi2,uint ge2);void xtimer0();void init1();void init2();void init3();void init4();void init5();void xint1();void xint0();void LED_ON();void LED_OFF();void main(){P0=0xFF;P1=0xFF;P2=0x00;P3=0xFF;EA=1;EX0=1;IT0=0;init1();while(1){init2();//第2个状态init3(); //第3个状态init4(); //第4个状态init5();//第5个状态}}void init1()//第一个状态:东西、南北方向均亮红灯5S {uint temp;temp=5;TMOD=0x01;TH0=(65535-50000)/256;TL0=(65535-50000)%256;EA=1;ET0=1;TR0=1;while(1){RED_DONGXI=0; //第一个状态东西、南北均亮红灯5SRED_NANBEI=0;GREEN_DONGXI=1;GREEN_NANBEI=1;YELLOW_DONGXI=1;YELLOW_NANBEI=1;if(aa==20)//定时20*50MS=1S{aa=0;temp--;}shi1=shi2=temp/10;ge1=ge2=temp%10;if(temp==0){temp=5;break;}display(ge1,shi1,ge2,shi2);}}void init2()//第二个状态:东西亮红灯30S~5S、南北亮绿灯25~0S;{uint temp;temp=26;TMOD=0x01;TH0=(65535-50000)/256;TL0=(65535-50000)%256;EA=1;ET0=1;TR0=1;while(1){RED_DONGXI=1;RED_NANBEI=0;GREEN_DONGXI=0;GREEN_NANBEI=1;YELLOW_DONGXI=1;//第二个状态:东西亮绿灯25S、南北亮红灯YELLOW_NANBEI=1;if(aa==20)//定时20*50MS=1S{aa=0;temp--;shi1=(temp+5)/10;ge1=(temp+5)%10;shi2=temp/10;ge2=temp%10;if(temp==0){temp=26;break;}}display(ge1,shi1,ge2,shi2);}}void init3() //第三个状态:东西绿灯变为黄灯闪5次、南北亮红灯5S {uint temp;temp=6;TMOD=0x01;TH0=(65535-50000)/256;TL0=(65535-50000)%256;EA=1;ET0=1;TR0=1;while(1){RED_NANBEI=0;GREEN_DONGXI=1;if(aa==20)//定时20*50MS=1S{aa=0;temp--;YELLOW_DONGXI=~YELLOW_DONGXI;shi1=temp/10;shi2=shi1;ge1=temp%10;ge2=ge1;}if(temp==0){temp=6;break;}display(ge1,shi1,ge2,shi2);}}void init4()//第四个状态:东西亮绿灯25~0S,南北方向亮红灯30~5S;{uint temp;temp=26;TMOD=0x01;TH0=(65535-50000)/256;TL0=(65535-50000)%256;EA=1;ET0=1;TR0=1;while(1){RED_DONGXI=0;RED_NANBEI=1;YELLOW_DONGXI=1;//第一个状态东西、南北均亮红灯5SGREEN_NANBEI=0;if(aa==20){aa=0;temp--;shi1=temp/10;shi2=(temp+5)/10;ge1=temp%10;ge2=(temp+5)%10;if(temp==0){temp=26;break;}}display(ge1,shi1,ge2,shi2);}}void init5()//第五个状态:东西亮红灯、南北绿灯闪5次转亮黄灯5S {uint temp;temp=6;TMOD=0x01;TH0=(65535-50000)/256;TL0=(65535-50000)%256;EA=1;ET0=1;TR0=1;while(1){RED_NANBEI=1;RED_DONGXI=0;GREEN_DONGXI=1;GREEN_NANBEI=1;if(aa==20){aa=0;temp--;YELLOW_NANBEI=~YELLOW_NANBEI;shi1=temp/10;shi2=shi2;ge1=temp%10;ge2=ge1;if(temp==0){temp=6;break;}}display(ge1,shi1,ge2,shi2);}}void display(uint shi1,uint ge1,uint shi2,uint ge2) {DXweixuan1=0;DXweixuan2=1;NBweixuan1=1;NBweixuan2=1;P0=table[ge1];delay(5);DXweixuan1=1;DXweixuan2=0;NBweixuan1=1;NBweixuan2=1;P0=table[shi1];delay(5);DXweixuan1=1;DXweixuan2=1;NBweixuan1=0;NBweixuan2=1;P0=table[ge2];delay(5);DXweixuan1=1;DXweixuan2=1;NBweixuan1=1;NBweixuan2=0;P0=table[shi2];delay(5);}void xint0() interrupt 0 {RED_NANBEI=0;RED_DONGXI=0;GREEN_NANBEI=1;GREEN_DONGXI=1;YELLOW_NANBEI=1;YELLOW_DONGXI=1;P0=0x00;NBweixuan1=0;NBweixuan2=0;DXweixuan1=0;DXweixuan2=0;delay(2);return ;}void xint1() interrupt 2 {RED_NANBEI=1;RED_DONGXI=1;GREEN_NANBEI=0;GREEN_DONGXI=0;YELLOW_NANBEI=1;YELLOW_DONGXI=1;P0=0x00;NBweixuan1=0;NBweixuan2=0;DXweixuan1=0;DXweixuan2=0;delay(2);return ;}void xtimer0() interrupt 1 {TH0=(65535-50000)/256;TL0=(65535-50000)%256;aa++;}void delay(uint z){uint x,y;for(x=0;x<z;x++)for(y=0;y<110;y++); }。
基于51单片机的交通灯C语言程序
基于51单片机的交通灯C语言程序
/*南北:P1-0红,P1-1黄,P1-2绿,
东西:P1-4红,P1-5黄,P1-6绿,*/
#include"REG51.H"
sbit P1_0 = 0x90;
sbit P1_1 = 0x91;
TR0=1;
EA=1;ET0=1;
while (1)
{
if(time>24)
P1=0xeb; //P1--2=0,P1_4=0,南北绿东西红
else if(time>19)
{ //南北绿熄灭,南北黄闪烁
P1_2=1;
P1_1=~P1_1; }
//P1=0xed;
else if(time>4 )
P1=0xbe; //P1--0=0,P1_6=0,南北红东西绿
else
{
P1_6=1; //东西绿熄灭,东西黄闪烁
P1_5=~P1_5;
}
if(time>=25)
display((time-20)+(time-25)*100);
else if(time>=20)
display((time-20)*101);
else if(time>=5)
display(time*100+(time-5));
zt=zt/10;
a[1]=zt%10;
zt=zt/10;
a[0]=zt%10;
lie=0x01;
for ( i=0;i<4;i++)
{
P3=~lie;
P2=chr[a[i]];
MSC-51系列单片机IntelAT89C51为中心器件设计交通灯控制器(附源程序和电路图)
MSC-51系列单片机IntelAT89C51为中心器件设计交通灯控制器(附源程序和电路图)一、工程简介(一)、概述本设计是交通灯的控制实验,必须要先了解实际交通灯的变化规律。
假设一个路口为东西南北走向,即十字路口,初始状态零为东西南北灯都熄灭。
然后转状态一东西绿灯通车,南北为红灯。
过段时间转状态二,东西绿灯闪几次转黄灯,延时几秒,南北仍为红灯。
再转状态三南北绿灯通车,东西红灯。
过段时间转状态四南北绿灯闪几次转黄灯,延时几秒,东西仍为红灯。
最后循环至状态一。
交通信号灯模拟控制系统设计利用单片机的定时器定时,控制十字路口红绿灯交替电亮和熄灭,并且用LED数码管显示时间,但由于时间及水平的不足,在此实验中不显示。
用十二个发光二极管代替交通灯进行实验设计。
这次设计是《微机接口与控制技术》课程的综合训练,我们通过理论学习,课题选择,资料查阅,软、硬件设计,系统调试等环节,巩固所学的知识及提高应用水平.在此我们要学会从提出问题,观察与分析问题,到最终解决问题科学方法.提高自己的思维能力和动手能力,在设计中获得一些实操经验,更是要培养我们的工作作风和工作态度。
为今后的毕业设计、及从事微机控制系统的设计与维护奠定坚实的基础。
这次课题设计的意义在于通过具体的控制系统的设计,掌握微机控制系统设计的一般方法和处理问题的思路,特别是一些常用的技术手段。
使我们能在实践教学环境中累积设计经验,开拓思维空间,全面提高个人的综合能力。
(二)、工艺流程图因为本实验是交通灯控制实验,所以要先了解实际交通灯的变化规律。
假设一个十字路口为东西南北走向。
初始状态0为东西南北灯都熄灭。
然后转状态1东西绿灯通车,南北红灯。
过一段时间转状态2,东西绿灯闪几次转亮黄灯,延时几秒,南北仍然红灯。
再转状态3,南北绿灯通车,东西红灯。
过一段时间转状态4,南北绿灯闪几次转亮黄灯,延时几秒,南北仍然红灯。
最后循环至状态1。
交通信号灯模拟控制系统设计利用单片机的定时器定时,令十字路口的红绿灯交替点亮和熄灭,并且用LED 数码管显示时间,但由于时间和水平的限制就不显示时间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Keil C 源程序: #include<reg51.h> #define uchar unsigned char #define uint unsigned int sbit RED_DONGXI = P1^0;//南北方向红灯亮 sbit YELLOW_DONGXI = P1^1;//南北方向黄灯亮 sbit RED_NANBEI = P1^3;//东西方向红灯亮 sbit GREEN_DONGXI = P1^2;//南北方向绿灯亮 sbit YELLOW_NANBEI = P1^4;//东西方向黄灯亮 sbit GREEN_NANBEI = P1^5;//东西方向绿灯亮 sbit DXweixuan1 = P1^6;//南北方向数码管位选 1 sbit DXweixuan2 = P1^7;//南北方向数码管位选 2 sbit NBweixuan1 = P3^0;//东西方向数码管位选 1 sbit NBweixuan2 = P3^1;//东西方向数码管位选 2 sbit L1=P3^5; sbit L2=P3^6; sbit L3=P3^7; uint aa, bai,shi,ge,bb; uint shi1,ge1,shi2,ge2; uint code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; uint code table1[]={0xfc,0x60,0xda,0xf2,0x66,0xb6,0xbe,0xe0,0xfe,0xf6};
ge1=(temp+5)%10; shi2=temp/10; ge2=temp%10; if(temp==0) { temp=26; break; } } display(ge1,shi1,ge2,shi2); } } void init3() //第三个状态:东西绿灯变为黄灯闪 5 次、南北亮红灯 5S { uint temp; temp=6; TMOD=0x01; TH0=(65535-50000)/256; TL0=(65535-50000)%256; EA=1; ET0=1; TR0=1; while(1) { RED_NANBEI=0; GREEN_DONGXI=1; if(aa==20)//定时 20*50MS=1S { aa=0; temp--; YELLOW_DONGXI=~YELLOW_DONGXI; shi1=temp/10; shi2=shi1; ge1=temp%10; ge2=ge1; } if(temp==0) { temp=6; break; } display(ge1,shi1,ge2,shi2); } }
while(1) { RED_NANBEI=1; RED_DONGXI=0; GREEN_DONGXI=1; GREEN_NANBEI=1; if(aa==20) { aa=0; temp--; YELLOW_NANBEI=~YELLOW_NANBEI; shi1=temp/10; shi2=shi2; ge1=temp%10; ge2=ge1; if(temp==0) { temp=6; break; } } display(ge1,shi1,ge2,shi2); } } void display(uint shi1,uint ge1,uint shi2,uint ge2) { DXweixuan1=0; DXweixuan2=1; NBweixuan1=1; NBweixuan2=1; P0=table[ge1]; delay(5); DXweixuan1=1; DXweixuan2=0; NBweixuan1=1; NBweixuan2=1; P0=table[shi1]; delay(5); DXweixuan1=1; DXweixuan2=1; NBweixuan1=0; NBweixuan2=1;
void main() { P0=0xFF; P1=0xFF; P2=0x00; P3=0xFF; EA=1; EX0=1; IT0=0; init1(); while(1) { init2();//第 2 个状态 init3(); //第 3 个状态 init4(); //第 4 个状态 init5();//第 5 个状态 } } void init1()//第一个状态:东西、南北方向均亮红灯 5S { uint temp; temp=5; TMOD=0x01; TH0=(65535-50000)/256; TL0=(65535-50000)%256; EA=1; ET0=1; TR0=1; while(1) {
void init4()//第四个状态:东西亮绿灯 25~0S,南北方向亮红灯 30~5S; { uint temp; temp=26; TMOD=0x01; TH0=(65535-50000)/256; TL0=(65535-50000)%256; EA=1; ET0=1; TR0=1; while(1) { RED_DONGXI=0; RED_NANBEI=1; YELLOW_DONGXI=1;//第一个状态东西、南北均亮红灯 5S GREEN_NANBEI=0; if(aa==20) { aa=0; temp--; shi1=temp/10; shi2=(temp+5)/10; ge1=temp%10; ge2=(temp+5)%10; if(temp==0) { temp=26; break; } } display(ge1,shi1,ge2,shi2); } } void init5()//第五个状态:东西亮红灯、南北绿灯闪 5 次转亮黄灯 5S { uint temp; temp=6; TMOD=0x01; TH0=(65535-50000)/256; TL0=(65535-50000)%256; EA=1; ET0=1; TR0=1;
P0=table[ge2]; delay(5); DXweixuan1=1; DXweixuan2=1; NBweixuan1=1; NBweixuan2=0; P0=table[shi2]; delay(5); } void xint0() interrupt 0 { RED_NANBEI=0; RED_DONGXI=0; GREEN_NANBEI=1; GREEN_DONGXI=1; YELLOW_NANBEI=1; YELLOW_DONGXI=1; P0=0x00; NBweixuan1=0; NBweixuan2=0; DXweixuan1=0; DXweixuan2=0; delay(2); return ; } void xint1() interrupt 2 { RED_NANBEI=1; RED_DONGXI=1; GREEN_NANBEI=0; GREEN_DONGXI=0; YELLOW_NANBEI=1; YELLOW_DONGXI=1; P0=0x00; NBweixuan1=0; NBweixuan2=0; DXweixuan1=0; DXweixuan2=0; delay(2); return ; } void xtimer0() interrupt 1 { TH0=(65535-50000)/256;
//第一个状态东西、南北均亮红灯 5S
void init2()//第二个状态:东西亮红灯 30S~5S、南北亮绿灯 25~0S; { uint temp; temp=26; TMOD=0x01; TH0=(65535-50000)/256; TL0=(65535-50000)%256; EA=1; ET0=1; TR0=1; while(1) { RED_DONGXI=1; RED_NANBEI=0; GREEN_DONGXI=0; GREEN_NANBEI=1; YELLOW_DONGXI=1;//第二个状态:东西亮绿灯 25S、南北亮红灯 YELLOW_NANBEI=1; if(aa==20)//定时 20*50MS=1S { aa=0; temp--; shi1=(temp+5)/10;
TL0=(65535-50000)%256; aa++; } void delay(uint z) {uint x,y; for(x=0;x<z;x++) for(y=0;y<110;y++); }
RED_DONGXI=0; RED_NANBEI=0; GREEN_DONGXI=1; GREEN_NANBEI=1; YELLOW_DONGXI=1; YELLOW_NANBEI=1; if(aa==20)//定时 20*50MS=1S { aa=0; temp--; } shi1=shi2=temp/10; ge1=ge2=temp%10; if(temp==0) { temp=5; break; } display(ge1,shi1,ge2,shi2); } }
void void void void void void void void void volay(uint z); init(uint a); display(uint shi1,uint ge1,uint shi2,uint ge2); xtimer0(); init1(); init2(); init3(); init4(); init5(); xint1(); xint0(); LED_ON(); LED_OFF();