无线传感器网络中APIT-SC三维定位算法
无线传感器网络立体定位算法与仿真
出待定位节点到此信标节点的距离,然后把这一距离和待定位
节点的身份标识发送至终端用户节点 R。终端用户节点 R 根据
信标节点发送的距离信息标系,标定信标节点在直角坐标系中的
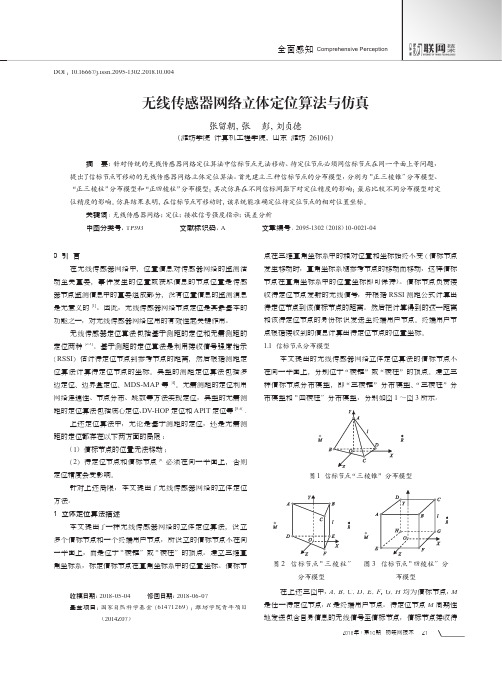
位 置 坐 标 A(x1,y1,z1),B(x2,y2,z2),C(x3,y3,z3),D(x4, y 4,z 4),E(x 5,y 5,z 5),F(x 6,y 6,z 6),G(x 7,y 7,z 7),H(x 8, y8,z8), 假 设 待 定位 节点 M 的 坐 标 为(x,y,z)。 用 d(i i=1, 2,…,8)表示待定位节点到信标节点的距离。具体研究中, 通常使用的 RSSI 定位模型如下 [8-10] :
———————————————— 收稿日期:2018-05-04 修回日期:2018-06-07 基金项目:国家自然科学基金(61471269);潍坊学院青年项目 (2014Z07)
点在三维直角坐标系中的相对位置和坐标始终不变(信标节点 发生移动时,直角坐标系随参考节点的移动而移动,这样信标 节点在直角坐标系中的位置坐标即可保持)。信标节点负责接 收待定位节点发射的无线信号,并根据 RSSI 测距公式计算出 待定位节点到该信标节点的距离。然后把计算得到的这一距离 和该待定位节点的身份标识发送至终端用户节点。终端用户节 点根据接收到的信息计算出待定位节点的位置坐标。 1.1 信标节点分布模型
关键词:无线传感器网络;定位;接收信号强度指示;误差分析
中图分类号:TP393
文献标识码:A
文章编号:2095-1302(2018)10-0021-04
0引言 在无线传感器网络中,位置信息对传感器网络的监测活
动至关重要,事件发生的位置或获取信息的节点位置是传感 器节点监测信息中的重要组成部分,没有位置信息的监测消息 是无意义的 [1]。因此,无线传感器网络节点定位是其最基本的 功能之一,对无线传感器网络应用的有效性起关键作用。
一种高精度无线传感器网络节点三维定位算法

2 Su nn a c . i ig Br n h,Sihu nElcrcPo rCo po a in,S c u n 6 9 00 Chia c a e ti we r r to ih a 2 0 , n
第2 1卷
第 1 期 2
传 感 技 术 学 报
C N E J UR AL O EN ORS A T TO HIES O N F S S ND AC UA RS
Vo . 1 No 1 12 .2 De . 0 8 c 2 0
20 0 8年 1 2月
Th e - m e i na d c lz to g rt m r e Di nso lNo e Lo a i a i n Al o ih o i h Pr c s o n W ie e s S ns r Ne wo k fH g — e i i n i r l s e o t r
WANG Q ndi , EJXi ,DU S n — n ANG e g h , ANG n — i g — W n o g wa g ,Y Ch n — e Y Yo g r n u
1 tt Ke a oaoyo o rTrnmi inE up n .Sae yL br tr f P we a s s o q imet& S se S c rt s ytm eui y
e e t ia e u p n a l Th o a ia i n a g rt m d p s a c a g d n n t i m u t i n in l c l g lc rc l q i me t u t f . elc l t l o i z o h a o t h n e o me r li me so a ai c d s n i i h t e i r t n r c s n y ma e s ft e c r ea e a ao n - o e g b rn d s n wh c h t a i s p o e s o l k su e o h o r l t d d t f e h p n i h o o e .Th l o e o o eag —
高精度无线传感器网络三维定位算法
o e wh n t e r n e b t e e sn l — op n i h o o e sn tg e tr t a h o n e a g e we n t i g e h e g b rn d s i o r a e h n t e c mmu i a o a i s n e r s s z r Th s ag rt m a e h h n c t n r d u ,a d t e ti e o. i l o h i h i b ss h t o fma r t r tv p m z t n b a n c u a e p sto o n n wn n d s S mu a i n r s t n i a e t a ia i t e me h d o t x ie a i e o t ia i n a d o t i st e a c r t o ii n f rt e u k o o e . i lto e ul i d c t st a e l c lz t n i i o h h h t o h o a c r c ft e l c lz t n a g rt m se c l n . c u a y o o ai a o l o i h i h i x e l t e
Hi h p e ii n 3 Lo a i a i n Al o ih g - r c so D c l to g rt m z
基于角度判断的无线传感器网络APIT定位算法研究

b a s e d o n j u d g me n t o f a n g l e
HU Z h o n g — d o n g ,J I A F a n g — f a n g
( S c h o o l o f I n f o r ma t i o n E n g i n e e r i n g , J i a n g x i Un i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y , Ga n z h o u 3 4 1 0 0 0 , C h i n a )
中 图 分类 号 :T P 3 9 3 文 献 标 识 码 :A 文 章 编 号 :1 0 0 0 - 9 7 8 7 ( 2 0 1 3 ) 0 1 00 - 7 3 - 0 3
Re s e a r c h o n API T l o c a l i z a t i o n a l g o r i t h m f o r W S Ns
a l g o r i t h m w h i c h c a n j u d g e t h e l o c a l i z a t i o n o f u n k n o w n n o d e b y s u m ma t i o n o f a n g l e i s p r e s e n t e d . T h e s i m u l a t i o n
e n vi r o n me nt .
Ke y wo r d s :wi r e l e s s s e n s o r n e t w o r k s ;n o d e l o c a l i z a t i o n;AP I T;s u mma t i o n o f a n g l e
湖南大学无线传感器报告定位算法APIT和RSSI

无线传感器网络实验题目:定位算法学生:学号:完成时间:一、实验目的1.掌握matlab工具的使用方法。
2.了解APIT或RSSI算法原理,熟悉APIT或RSSI算法代码,分析APIT或RSSI算法实验结果。
二、实验原理APIT算法概述(一)基本思想1.首先确定多个包含未知节点的三角形区域2.这些三角形区域的交集是一个多边形,它确定更小的包含未知节点的区域3.计算这个多边形的质心,并将质心作为未知节点的位置。
(二)基本过程1.未知节点首先收集其临近新标节点的信息。
2.从这些信标节点组成的集合中任意选取三个节点。
假设集合中有n 个元素,那么共有Cn3种不同的选取方法,确定Cn3个不同三角形,逐一测试未知节点是否位于每个三角形内部,知道穷尽所有Cn3种组合表达式3.计算包含目标节点所有三角形的重叠区域(三)APIT算法分四步:(1)信标交换;((2)三角形内点测试(PIT, Point-In-Triangulation testing);(3)交集运算计算三角形的重合区域;(4)重心(COG, Center of Gravity)计算求节点的位置。
(四)定位的理论基础PIT:最佳三角形内点测试法PIT原理:假如存在一个方向,节点M沿着这个方向移动会同时原理或接近A.B.C,那么节点M位于三角形ABC外,否则,节点M位于三角形ABC内。
(五)APIT算法的具体步骤1.收集信息:位置节点收集邻近信标节点的信息,入位置,标志号,接受的信号强度,邻居节点之间交换各自接受到的信标节点的信息2.APIT测试3.测试未知节点是否在不同信标节点组成三角形内部4.计算重叠区域,统计包含未知节点三角形,计算所有三角形的重叠区域5.计算未知节点的位置6.计算重叠区域的质心位置,作为未知节点的位置(六)RSSI算法1.基本思想一直发射节点的发射信号强度,接收节点根据收到信号的强度,计算出信号的传播损耗,利用理论或者经验的模型将传输损耗转化为距离,再利用已经有的算法计算出节点的位置信号强度(RSS )①通过信号在传播中的衰减来估计节点之间的距离②根据信道模型求解距离③信道的时变特性:(1)信道由于受到多径衰减(Multi-path Fading)(2)非视距阻挡(Non-of-Sight Blockage )的影响三、实验内容和步骤APIT:APIT代码如下所示:function APIT(grid_length)% In APIT, the sensor nodes are not homogeneous% the communication range of anchors is larger than that of unknown nodes% comm_r: the communication range of the unknown node. it's saved in neighbor.mat% the communication range of the anchor node is : times * comm_r, saved in neighbor.mat %~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ load '../Deploy Nodes/coordinates.mat';load '../Topology Of WSN/neighbor.mat';%~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ disp('时间较长,耐心等待...');unknown_node_index=all_nodes.anchors_n+1:all_nodes.nodes_n;row_n=ceil(all_nodes.square_L/grid_length); col_n=row_n;centroid_x=repmat(([1:col_n]-0.5)*grid_length,row_n,1);centroid_y=repmat(transpose(([1:row_n]-0.5)*grid_length),1,col_n);for i=unknown_node_indexdisp([num2str(i),':我在跑,不要催啦...']);neighboring_anchor_index=find(neighbor_matrix(i,1:all_nodes.anchors_n)==1);neighboring_anchor_n=length(neighboring_anchor_index);if neighboring_anchor_n>=3gridmap=zeros(row_n,col_n);grid_covered_flag=zeros(row_n,col_n);for a=1:neighboring_anchor_n-2for b=a+1:neighboring_anchor_n-1for c=b+1:neighboring_anchor_n%~~判断未知节点i是否在三角形abc内部% Approximate P.I.T Test: "If no neighbor of M is further from/close to all three anchors A, B and C simultaneously,% M assumes that it is inside triangle abc. Otherwise,M assumes it resides outside the triangle."neighboring_node_index=setdiff(find(neighbor_matrix(i,:)==1),neighboring_anchor_index([a b c]));neighboring_node_rss_of_abc=neighbor_rss(neighboring_node_index,neighboring_anchor_inde x([a b c]));in_out_judge=neighboring_node_rss_of_abc>repmat(neighbor_rss(i,neighboring_anchor_index([ a b c])),length(neighboring_node_index),1);ifany(sum(transpose(in_out_judge))==0|sum(transpose(in_out_judge))==3)%outsideGrid_in_triangle_abc=inpolygon(centroid_x,centroid_y,all_nodes.estimated(neighboring_anchor _index([a b c]),1),all_nodes.estimated(neighboring_anchor_index([a b c]),2));%被三角形abc覆盖到的网格gridmap=gridmap-Grid_in_triangle_abc;else%insideGrid_in_triangle_abc=inpolygon(centroid_x,centroid_y,all_nodes.estimated(neighboring_anchor _index([a b c]),1),all_nodes.estimated(neighboring_anchor_index([a b c]),2));%被三角形abc覆盖到的网格gridmap=gridmap+Grid_in_triangle_abc;endgrid_covered_flag=grid_covered_flag|Grid_in_triangle_abc;endendendif any(any(grid_covered_flag))weight_max=max(max(gridmap(grid_covered_flag)));weight_max_index=intersect(find(gridmap==weight_max),find(grid_covered_flag==1));[weight_max_ind_row,weight_max_ind_col]=ind2sub(size(gridmap),weight_max_index);all_nodes.estimated(i,:)=mean([weight_max_ind_colweight_max_ind_row;weight_max_ind_col weight_max_ind_row]*grid_length-0.5*grid_length);all_nodes.anc_flag(i)=2;endendendsave '../Localization Error/result.mat' all_nodes comm_r;end锚节点通信半径是源节点通信半径的2倍,采用正方形随机分布如上图所示红色*表示锚节点,蓝色O表示未知节点的估计位置,黑色O表示不能被定位的未知节点,蓝色-表示未知节点的定位误差(连接未知节点的估计位置和真实位置),一共300个节点:60个锚节点,240个未知节点,0个不能被定位的未知节点,定位误差为0.93787锚节点通信半径变成4倍以后程序运行速度明显变慢,理论上分析定位误差应该是更加大了因为未知节点所在的三角形增多了,所以定位误差更大。
无线传感器网络的三维空间定位算法

无线传感器网络的三维空间定位算法陆保国;袁杰【期刊名称】《计算机工程》【年(卷),期】2011(037)014【摘要】环境和硬件本身等因素使无线传感器网络的定位精度受到影响.为此,通过三维空间定位过程的分析,提出基于接收信号强度(RSSI)测距和Gauss模型的RGM 定位算法.该定位算法无需硬件的扩展.仿真实验表明,相比普通的基于RSSI的测距算法,该算法可提高定位精度、缩短响应时间.%The precision of the localization is affected due to the various reasons such as environment and hardware itself. The paper presents the Received Signal Strength Indicator(RSS1) ranging and Gauss Mixed(RGM) algorithm localization algorithm, which is based on RSSI range measurement and Gauss model. The algorithm is easy to implement and does not need to hardware extension. Simulation result shows that the proposed method obtains a more accurate localization result than the RSSI localization algorithm and has a shorter responding time.【总页数】3页(P97-99)【作者】陆保国;袁杰【作者单位】南京大学电子科学与工程学院,南京,210093;南京大学电子科学与工程学院,南京,210093【正文语种】中文【中图分类】TP301.6【相关文献】1.基于RSSI无线传感器网络空间定位算法 [J], 周艳;李海成2.基于RSSI的三维空间定位算法研究 [J], 王山;冯锋;王洪伟3.无线传感器网络在地震区山地灾害监测中的空间定位算法 [J], 白凤娥;郑锋凯4.融合深度信息的目标识别及三维空间定位算法 [J], 王月海;郭迎达5.基于杂草种群扩散思想的三维空间定位算法研究 [J], 马兴建;张星宇;朱大伟;潘子宇;秦鹏凯因版权原因,仅展示原文概要,查看原文内容请购买。
基于迭代的无线传感器网络三维定位算法

基于迭代的无线传感器网络三维定位算法祁荣宾;李思瑾;马天义;钟伟民;钱锋【期刊名称】《传感技术学报》【年(卷),期】2012(025)005【摘要】There exist low precision, high computational complexity and large amount of data transmission for the localization problem of wireless sensor network in three-dimensional space. To overcome these shortcomings, a distributed algorithm based on distance is proposed, which is called iterative localization algorithm and with high-precision ( namely ILAH-3D). This method extends the two-dimensional,classical algorithm AHLos to be applied to the three-dimensional space. The cumulative errors can be reduced and localization precision can be improved by using the weighted least squares method and adding the upgraded validation condition of localized node. And the performing conditions of the constrained cooperation algorithm are given according to the various position relations of those nodes. Then localization algorithm of the new iteration is carried on by combining with the upgraded anchor nodes. The computing complexity of ILAH-3D is simple and its amount of communication is small. Compared with the existing three-dimensional localization algorithms,this proposed algorithm can achieve very good accuracy even though there are some errors in the ranging.%针对目前无线传感器网络三维空间定位存在精度不高、计算复杂、传输数据量大等问题,提出了一种基于测距的分布式算法——高精度迭代三维定位算法(ILAH-3D).该方法将经典二维算法AHLos( Ad-Hoc Localization System)扩展到三维空间,通过采用加权最小二乘法和加入定位节点升级锚节点的验证条件来减少累计误差,提高节点定位精度,并根据三维空间中节点的各种位置关系,给出了约束协作算法的执行条件,然后结合升级的锚节点再进行新一轮的定位运算.该方法计算简单、通信量小,与已有三维定位算法相比,在测距存在一定误差的情况下,依然可以达到很好的精度.【总页数】7页(P644-650)【作者】祁荣宾;李思瑾;马天义;钟伟民;钱锋【作者单位】华东理工大学化工过程先进控制和优化技术教育部重点实验室,上海2002237;华东理工大学化工过程先进控制和优化技术教育部重点实验室,上海2002237;上海商学院计算机科学与技术系,上海200235;华东理工大学化工过程先进控制和优化技术教育部重点实验室,上海2002237;华东理工大学化工过程先进控制和优化技术教育部重点实验室,上海2002237【正文语种】中文【中图分类】TP393【相关文献】1.一种基于多维标度的分簇迭代无线传感器网络定位算法 [J], 林吉;李晖2.基于RSSI的无线传感器网络迭代安全定位算法 [J], 罗臻;刘宏立;徐琨3.基于质心迭代估计的无线传感器网络节点定位算法∗ [J], 蒋锐;杨震4.基于迭代分割的无线传感器网络定位算法 [J], 张婧; 国晶5.一种基于多维标度的分簇迭代无线传感器网络定位算法 [J], 林吉;李晖因版权原因,仅展示原文概要,查看原文内容请购买。
一种新型的无线传感器网络三维定位算法
一种新型的无线传感器网络三维定位算法李辉;熊盛武;段鹏飞【期刊名称】《计算机科学》【年(卷),期】2012(039)007【摘要】Node localization is crucial to wireless sensor network and both academia and industry pay much attention to it all the times. Existing localization methods are not suitable for three-dimensional terrains due to their design for planar applications,but in realistic application, the sensor nodes always distribute in three-dimensions,so study on the localization in three-dimensions will be much more in line with the actual application. According to the shortage of some existing algorithms proposed for three-dimensional space, a novel three-dimensional localization algorithm in wireless sensor networks was proposed. This algorithm needs no additional hardware support This scheme establishes a vector space model based on the number of the anchor nodes from the communication range of unknown node,and when estimating unknown node coordinate,anchors in the unknown node communication region constraint the estimation range of unknown nodes. The simulation results demonstrate that the algorithm is of great advantages in low communication o-verhead and improving coverage rate of location and location accuracy.%节点定位在无线传感器网络的应用中起着重要作用,一直备受学术界和工业界的关注.现有的大多数定位算法针对平面应用而设计,而现实应用中的无线传感器网络节点往往分布在三维空间中,研究三维空间定位更加符合实际节点的应用情况.针对目前三维空间定位算法的不足,提出了一种新型的无线传感器网络三维定位算法.该算法无需额外的硬件支持,根据未知节点通信范围内锚节点数目,建立空间向量模型进行定位;并且在估计未知节点坐标时,根据该未知节点通信范围的锚节点对其所在位置进行约束.仿真结果表明,该算法通信开销小,提高了节点定位覆盖率和定位精度.【总页数】4页(P55-57,95)【作者】李辉;熊盛武;段鹏飞【作者单位】武汉理工大学计算机科学与技术学院武汉430070;武汉理工大学计算机科学与技术学院武汉430070;武汉理工大学计算机科学与技术学院武汉430070【正文语种】中文【中图分类】TP398【相关文献】1.一种基于Euclidean的无线传感器网络三维定位算法 [J], 唐良瑞;宫月;罗艺婷;柯珊珊2.一种优化的移动无线传感器网络三维定位算法研究 [J], 王照宇3.一种新的三维无线传感器网络节点定位算法 [J], 曾传璜;蒋红刚4.一种新型的无线传感器网络三维定位机制 [J], 李辉;李腊元;李方云5.一种无线传感器网络移动节点的三维定位算法 [J], 邹斌;李长庚因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
104 传感器与微系统(Transducer and Microsystem Technologies) 2015年第34卷第7期 DOI:10.13873/J.1000-9787(2015)07-0104-03
无线传感器网络中APIT.SC三维定位算法 周礼争 ,唐瑞 ,张乙竹 ,程俊 ,余敏 (1.江西师范大学计算机信息工程学院,江西南昌330022; 2.江西师范大学软件学院。江西南昌330022)
摘要:针对无线传感器网络中近似四面体内点三维(APIT-3D)定位算法存在的问题,提出一种基于球 切割的APIT(APIT—SC)定位算法。该算法改善在节点分布不均匀时定位精度和定位覆盖率差的问题,用 体积规则减少PIT-3D测试中出现OutToln和InToOut错误。以球切割法和轮回选择法改善算法性能,降 低计算复杂度。仿真实验表明:500个节点随机部署在100nl X100m x100m的理想网络环境下,APIT-SC 算法定位覆盖率可达9l%,定位误差在23%左右。与APIT-3D算法相比,降低了计算复杂度,提高了定 位精度。 关键词:无线传感器网络;三维定位算法;体积规则;球切割;轮回选择法 中图分类号:TP393 文献标识码:A 文章编号:1000-9787(2015)07-0104-03
APIT-SC 3 D positioning algorithm for WSNs ZHOU Li.zheng ,TANG Rui。,ZHANG Yi—zhu ,CHENG Jun ,YU Min。
(1.School of Computer Information and Engineering,Jiangxi Normal University,Nanchang 330022, China;2.School of Software,Jiangxi Normal University,Nanchang 330022,China)
Abstract:Aiming at problem of approximate point in tetrahedron 3 D(APIT-3 D)positioning algorithm for WSNs, an improved APIT-3D localization algorithm based on sphere cutting(SC)(APIT-SC)is proposed.The algorithm improves problem of low precision and low coverage rate of localization when distribution of nodes is uneven,it also reduces misjudgment errors of OutToln and InToOut in PIT-3D test.Computational complexity is reduced by using sphere cutting method and recurrent selection method.Simulation experimental results indicate that the positioning coverage rate is up to 91%and positioning error is controlled about 23%when 500 nodes are randomly deployed in 100 m×100 m×100 m ideal network scenarios.Compared with the APIT-3D algorithm.APIT—SC algorithm reduces the amount of computational complexity and improves the positioning precision. Key words:wireless sensor networks(WSNs);3 D positioning algorithm;volume rule;sphere cutting(SC); recutrent selection method
0引 言 在无线传感器网络(wireless sensor networks,WSNs)应 用中,定位应用是最热门的应用研究之一。WSNs节点定 位技术是众多应用得以实施的基础和前提,也是研究的重 点和难点。 WSNs节点定位算法分为基于测距(range—based)和基 于非测距(ranged.flee)两类¨ ]。基于测距的定位一般需 要额外的硬件支持,如TOA,AOA及RSSI等算法 ,测量 彼此间的绝对距离或角度,再利用三边测量法、三角测量法 或极大似然估计法等估算位置信息。基于非测距的算法一
般是利用节点间连通性、相邻特性实现定位,如质心法、 DV—Hop及APIT等 。 在众多的三维(3D)定位算法中,DV—Hop定位算法已 近完善,但始终存在精度问题。而在其他方法中,引人关注 的是刘玉恒等人提出的WSNs近似四面体内点的三维 (approximate point in tetrahedron 3D,APIT-3D)定位算法 。 文献[9]提出基于质心迭代的APIT定位算法,以质心迭代 代替网格扫描求解定位坐标。文献[1O,l1]都提出基于中 垂面的APIT定位算法,以中垂面切割缩小未知节点存在区 域。在上述文献思想上,本文提出一种基于球切割的APIT
收稿日期:2015-05—11 基金项目:国家自然科学基金资助项目(41374039);国际科技合作专项项目(35—14) 第7期 周礼争,等:无线传感器网络中APIT—SC三维定位算法 105 (APIT.SC)定位算法,未知节点定位任务分解到周围锚节 点,自己求解各锚节点上报存在区域的交集的质心作为定 位结果。 1相关算法描述 1.1 基于中垂面的3D定位算法 陈月娥、余敏提出的APIT-VP定位算法 。首先,以 PIT-3D测试确认未知节点在四面体内。其次,任选取两锚 节点连成线段,并以该线段的中垂线形成中垂面,未知节点 对其感知这2个锚节点的RSSI值作比较,判断自身在中垂 面的哪一侧。重复上述操作,必划分出共同区域,则以此区 域质心为定位坐标。 1.2 APIT-3D算法分析 该算法的思想:未知节点收集可感知的锚节点,任意 选4个非共面锚节点组成四面体,以某种技术 判断自身 是否在四面体内,若在四面体内,则称该四面体区域为未知 节点存在区域(presence area,PA)。穷尽所有PA的四面体 组合,用3D网格扫描算法获得PA的交域,并以交域质心 作为定位结果。APIT-3D算法的基础是PIT-3D测试原理: 当未知节点在四面体外时,存在邻居节点沿着一个方向运 动,邻居节点必同时远离或靠近四面体4个锚节点。若不 存在,则未知节点必在四面体内。在现实中,利用WSNs节 点分布特性,未知节点的邻居节点判断各自与锚节点距离 的远近,很大程度上实现对球面所有方向进行测试。PIT一 3D测试中,通常以RSSI的强弱来判断远离或靠近四面体 的锚节点。 APIT-3D算法有以下缺陷: 1)在PIT-3D测试中,当未知节点的邻居节点数量较少 或处于某些特殊位置时,会引起PIT测试出现InToOut和 OutToIn错误。 2)在节点分布不均匀时,节点密度较大的区域会引起 PI-3D测试计算量偏大。而节点密度较小时,定位精度较 低,或当锚节点数量小于4时,无法以APIT-3D进行定位。 3)在穷尽PA四面体交域时,采用网格扫描算法,计算 量较大,效率低下。 1.3 APIT-SC算法设计 针对APIT-3D算法存在上述缺陷,本文提出APIT-SC 定位算法,做了以下完善:1)采用四面体体积规则减少In— ToOut和OutToln错误。2)在节点密度较大时采用轮回选 择法,避免一段时间内只在小区域内寻找满足PIT-3D的邻 居节点。当锚节点不足以构成四面体时,以RSSI加权三维 质心定位算法进行定位。3)以球切割法代替网络扫描法 减少计算复杂度。 体积规则: 如图1所示,若未知节点E在四面体内,则VA + ∞E+ c∞+vAcDE=vA脚;若E在四面体外,即E ,则 胧,+ 肋 + c + cD > ,其中 c 计算了 2次,有利于探测边缘效应 J。根据RSSI对数测距模 型 ,距离值和RSSI值是一一对应的函数关系,故可用 RSSI值代替距离值做定性分析,即d =I RS5, 一 .s5, I, 其中船s, 为B点感知A点RSSI值,RSSI ^为』4点感知自 身RSSI值。根据欧拉四面体数学模型 ,四面体体积公 式如式(1)所示
V= 其中,2,m,n,p,q,r为四面体6条棱长。
【J 图1体积规则示意图
Fig 1 Diagram of volume rule 轮回选择法:
未知节点邻居节点如图2所示,轮回选择步骤如下: 1)将未知节点的邻居节点分别以其感知四面体4个锚 节点RSSI值进行排序形成4组RSSI单调邻居节点队列。 2)分别轮回从4组RSSI队列中取元素进行PIT-3D测 试,若符合,则返回测试结果并退出算法;若不符合,则在其 他3组中标记该邻居节点已被测试,执行步骤(3)。 3)重复步骤(2),直到找到满足PIT-3D测试的邻居节 点或队列为空时,返回测试结果并退出算法。
图2未知节点邻居节点示意图 Fig 2 Diagram of neighbor nodes of unknown node AP1T-SC算法流程如图3所示,步骤如下: 1)在空间部署节点形成WSNs,网络初始化。 2)未知节点U( ,Y, )定位时,感知周围锚节点,记录 可见锚节点信息(ID、空间坐标、RSSI值),将可见锚节点以 其返回的RSSI值进行降序排序存入队列Q.1ist(数组构
置三 2