RTKLIB中文说明书
rtklib中文说明(部分)
RTKLIB provide the following general purpose C‐functions callable from user AP (application program).User can use these function to develop user original positioning APs.(1) Matrix and vector functions 矩阵与向量函数(2) Time and string functions 时间和字符串函数(3) Coordinates transformation and geoid model坐标变换和大地水准面模型(4) Navigation processing 导航处理(5) Positioning models (troposphere, ionosphere, antenna PCV) 定位模型(对流层,电离层,天线PCV)(6) SBAS DGPS/DGNSS correction DGPS / SBAS DGNSS校正(7) Single point positioning 单点定位(8) Carrier‐based and code‐based relative positioning 基于载波‐和代码‐基础相对定位(9) OTF integer ambiguity resolution OTF求解整周模糊度(10) Receiver raw binary data input 接收原始二进制数据输入(11) Positioning solution/NMEA input/output输入/输出的NMEA /定位解决方案(12) RINEX observation data/navigation message input/output RINEX观测数据和导航信息的输入/输出(13) Precise ephemeris input 精密星历的输入(14) Stream data communication library流数据通信库(15) NTRIP (Networked Transport of RTCM via Internet Protocol) library NTRIP(网络传输协议通过Internet协议)库(16) RTK‐GPS/GNSS positioning server rtk‐gps / GNSS定位服务器(17) RTCM 2.3 and 3.0/3.1/3.2 message handling RTCM 2.3和3 / 3.1 / 3.2信息处理(18) Downloader functions 下载功能The following instructions shows the way to utilize the library of RTKLIB in user AP.下面的说明显示在用户rtklib AP利用库的方式(1)Add the following include directive to the source program of user AP.#include "rtklib.h"(2)Set the following compiler option to add RTKLIB source directory path to compiler include paths.-I rtklib_<ver>\src(3)Add the necessary RTKLIB library source files to source programs set for the AP build. Refer AppendixC Library APIs for the library function list and source programs provided by RTKLIB.Appendix A CUI Command ReferencesA.1 RTKRCVSYNOPSIS 简介rtkrcv [-s][-p port|-d dev][-o file][-t level]DESCRIPTIONA command line version of the real‐time positioning AP by RTKLIB. To start or stop RTK server, toconfigure options or to print solution/status, login a console and input commands. As default, stdin/stdoutare used for the console. Use ‐p option for network login with telnet protocol. To show the availablecommands, type ?or help on the console. The initial processing options are loaded from defaultconfiguration file rtkrcv.conf. To change the file, use ‐o option. To configure the processing options, editthe configuration file or use set, load or save command on the console. To shutdown the program, useshutdown command on the console or send the USR2 signal to the process. For configuration file, refer B.4.通过rtklib的实时‐时间定位命令行版本,启动或停止RTK服务器,配置选项或打印解决方案/状态,登录控制台,输入命令。
更新RTKLIB配置文件指南

更新RTKLIB配置⽂件指南更新RTKLIB 配置⽂件指南说明原⽂来⾃于rtklibexplorer的博客⽂章《》,⾸先⽤⾕歌翻译进⾏粗翻译,然后对个别词句做了修改,部分地⽅做了意译。
翻译仅仅为个⼈阅读⽅便,有错误的地⽅还请指出。
⽬录⾃从我上⼀次更新RTKLIB配置⽂件指南到现在已经有⼀段时间了。
⾃上次更新以来,我在代码中⼜添加了⼀些新功能,并了解了很多现有的功能。
之前更新的内容我都发布在了原帖⼦⾥,但这次我想我会重新发布它以便更容易找到它。
RTKLIB的⼀个好处是它具有极⾼的可配置性,并且可以提供⼤量输⼊选项。
但对于使⽤RTKLIB的新⼿来说可能会有点压⼒。
简要解释了每个选项是做什么的,但即使有了它,也很难知道如何最好地为某些参数选值。
我不会在这⾥对所有的输⼊选项进⾏全⾯的解释,但会解释⼀些我发现在我的实验中调整有⽤的内容,和为什么选择这些值。
我描述的是⼀些出现在配置⽂件中的参数项,⽽不是出现在RTKNAVI GUI菜单中的选项值,但我为这些参数所做的说明适⽤于两者。
下⾯的选项⾥,我把我的最新配置⽂件与默认配置⽂件进⾏了⽐较并对取值不同的选项进⾏了说明。
下表是流动站5HZ采⽤率对应的配置⽂件中的取值。
相同的配置⽂件可⽤在RTKNAVI,RTKPOST或RNX2RTKP。
以下⽤⿊体(原⽂为蓝⾊,译者注)突出显⽰的设置和选项仅仅在这⾥的演⽰代码中提供,⽽不在发布代码中提供,但我在它们下⽅给出⼤部分描述内容则适⽤于任⼀代码。
我所做的⼤多数⼯作都是针对使⽤Ublox M8N和M8T接收机以及短基线下的RTK解决⽅案,这些设置多直接应⽤于这些组合,但作为其他场景的起点应该是应该有⽤的。
本⽂主要是对rtklib⼿册做⼀些有⽤的补充,所以对于本⽂未涉及的⼀些参数请查找原⼿册。
SETTING1:pos1-posmode = static, kinematic, static-start, movingbase, fixed如果流动站处于静⽌状态,请使⽤“static”模式。
RTKLIB2.4.3中文使用说明书
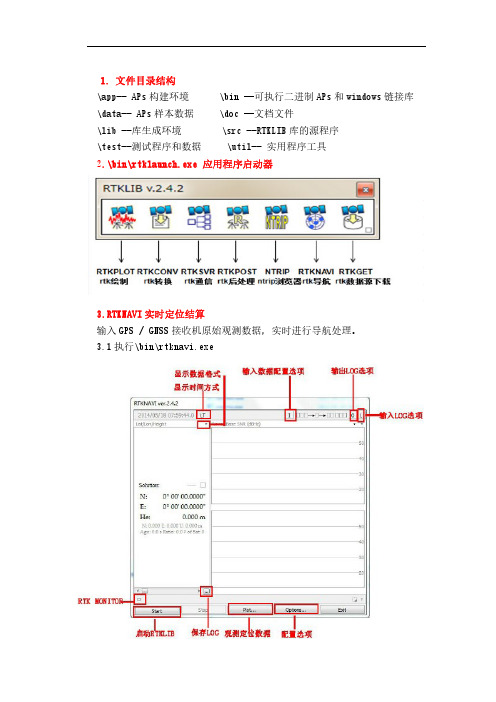
1.文件目录结构\app-- APs构建环境 \bin --可执行二进制APs和windows链接库 \data-- APs样本数据 \doc --文档文件\lib --库生成环境 \src --RTKLIB库的源程序\test--测试程序和数据 \util-- 实用程序工具2.\bin\rtklaunch.exe 应用程序启动器3.RTKNAVI实时定位结算输入GPS / GNSS接收机原始观测数据,实时进行导航处理。
3.1执行\bin\rtknavi.exe3.2用RTKNAVI进行实时定位必须输入GPS/GNSS接收机原始观测数据和卫星星历,点击I进入输入流对话框检查设置Rover、Basestation、Correction三个选项的设置,如果设置定位模式,只选择一个,基站和校正并不需要。
流类型可有从以下选项中选择(a)Serial :串口输入数据(b)TCP Client :连接到一个TCP服务器,通过TCP连接输入数据(c)TCP Server :接受一个TCP客户端连接和通过TCP连接的输入数据(d)NTRIP Client :连接一个NTRIP caster输入数据(e)File :日志文件中输入数据 。
[.conf](f)FTP :通过FTP下载一个文件后输入数据(g)HTTP :通过(a) HTTP 下载一个文件后输入数据3.3选择流类型为ʺSerialʺ(连续的)点击...按钮设置选项3.4在流类型中如果你选择了SerialTCP Client或者TCP Server作为类型,你可以通过流设置GPS / GNSS接收机启动和关闭命令,设置命令,按下“Cmdʺ标签下的…按钮。
在ʺSerial/TCP Commandsʺ对话框中进行设置,可以加载和保存命令3.5流类型中设置类型为ʺFileʺ可以设置文件输入路径,数据为原始数据,还可以设置时间3.6设置输出流格式,点击O按钮,弹出 ʺOutput Streamsʺ对话框,设置类型,3.7类型选择ʺFileʺ文件路径中的一些关键词将被日期和时间代替,按下按钮可以查看,选择ʺSwap Intvʺ输出文件在特定的周期内替换3.8输出一个输入流作为路径日志,点击按钮,弹出 ʺLog Streamsʺ 对话框,和 ʺOutput Streamsʺ对画框一样路径被关键词替换3.9设置完成后,点击Start按钮。
R9100双频RTK高精度定位接收机数据手册说明书

1R9100双频RTK 高精度定位接收机数据手册Apr, 2020修订记录免责声明本文档提供有关深圳市西博电子有限公司产品的信息。
本文档并未以暗示、禁止反言或其他形式转让本公司或任何第三方的专利、商标、版权或所有权或其下的任何权利或许可。
除西博在其产品的销售条款和条件中声明的责任之外,本公司概不承担任何其它责任,并且,西博对其产品的销售和/或使用不作任何明示或暗示的担保,包括对产品的特定用途适用性、适销性或对任何专利权、版权或其它知识产权的侵权责任等,均不作担保。
若不按手册要求连接或操作产生的问题,本公司免责。
西博可能随时对产品规格及产品描述作出修改,恕不另行通知。
对于本公司产品可能包含某些设计缺陷或错误,一经发现将收入勘误表,并因此可能导致产品与已出版的规格有所差异。
如客户索取,可提供最新的勘误表。
2目录1产品介绍 (4)1.1 概述 (4)1.2 关键指标 (5)2.电气特性 (6)2.1电气极大值 (6)2.2运行条件 (6)3产品功能 (7)3.1 多模卫星星座 (7)3.2 增强系统 (7)3.3 快速在线标定 (8)3.4 自由安装 (9)3.5 导航数据率 (9)3.6 MEMS传感器原始数据输出 (9)4.外形尺寸 (10)5. 传输及接口 (9)6. 订购信息 (10)31产品介绍1.1 概述R9100多模双频高精度GNSS/MEMS 组合导航接收机,是深圳市西博电子有限公司推出的基于六自由度MEMS 传感器与双频RTK 卫星导航紧密结合的组合导航系统,RTK算法与组合导航算法高效运行于片上处理器,是一款低功耗、小体积、高精度、无需接入里程计辅助、具备城市峡谷和长时间隧道,100%导航可用性的厘米级组合导航产品。
R9100采用先进的MEMS 惯性传感器与载波差分(RTK)卫星导航组合导航技术,充分利用了卫星导航的载波相位信息与惯性器件(三轴陀螺与三轴加速度计)的相对角运动与线运动测量功能,使用多维扩展卡尔曼滤波技术及其它特定算法实现了在微小器件上的三维高精度导航测姿功能。
RTKLIB开发文档
软件开发文档软件名称RTKPOST项目组成员王会、刘琦起止日期2017年 6 月20 日至2017年8 月15 日目录1.项目论证························································································- 1 -1.1目标任务················································································- 1 -1.2项目背景及必要性····································································- 1 -1.3计划进展················································································- 2 -2.需求分析························································································- 3 -2.1软件描述················································································- 3 -2.2运行环境及外部接口需求 ··························································- 3 -3.软件设计························································································- 4 -3.1软件体系结构··········································································- 4 -3.2软件解算流程··········································································- 5 -3.3软件设计模块··········································································- 6 -3.4软件功能描述··········································································- 7 -3.5全局数据结构说明····································································- 9 -4.软件操作说明················································································ - 11 -4.1界面介绍·············································································· - 11 -4.2软件安装·············································································· - 12 -4.3软件操作·············································································· - 12 -5.软件测试······················································································ - 16 -5.1测试计划·············································································· - 16 -5.2测试方法及工具····································································· - 16 -5.3测试用例·············································································· - 16 -5.4测试结果·············································································· - 17 -参考文献 ··························································································· - 18 -1.项目论证1.1目标任务根据比赛要求,经过小组讨论,我们选择了RTKLIB进行二次开发。
总结rtklib
RTKlib关于高精度GPS动态定位处理过程第一章引言 (4)1.1调用主函数main(rnx2rtkp.c) (4)1.2调用后处理函数postpos(postpos.c) (4)1.3 处理基站信息execses_b(postpos.c) (4)1.4 处理流动站信息execses_r(postpos.c) (4)1.5执行处理操作execses(postpos.c) (5)1.6函数调用流程图 (5)第二章文件读取 (6)2.1观测文件读取readobsnav (postpos.c) (6)2.1.1 文件头读取redarnxh (rinex.c) (6)2.1.2 文件的记录数据读取readrnxobs (rinex.c) (7)2.2导航电文文件读取 (8)2.2.1 文件头读取 (8)2.2.2 文件的记录数据读取 (8)第三章计算基准站位置和速度 (9)3.1利用导航文件与基准站观测文件求卫星位置、速度和卫星钟钟差satposs(ephemeris.c) (9)3.1.1卫星钟钟差计算ephclk(ephemeris.c) (9)3.1.2 卫星位置计算satpos(ephemeris.c) (10)3.2 码伪距单点定位estpos(pntpos.c) (11)3.3函数调用流程图 (12)第四章动态相对定位求流动站位置 (13)4.1 码伪距单点定位求流动站的近似坐标pntpos (13)4.2 载波相位动态相对定位relpos(rtkpos.c) (13)4.2.1 利用导航文件和流动站观测文件求卫星位置和卫星钟钟差satposs(ephemeris.c) (13)4.2.2 求基准站对应的非差残差项zdres(rtkpos.c) (13)4.2.3 实时状态更新udstate(rtkpos.c) (14)4.2.4 求流动站对应的非差残差项zdres(rtkpos.c) (15)4.2.5 求双差残差项ddres(rtkpos.c) (15)4.2.6 卡尔曼滤波filter(rtkcmn.c) (18)4.2.7 模糊度整数估计resamb_LAMBDA() (19)4.3 函数调用流程图 (21)第五章总结 (22)5.1结果输出 (22)5.2 不足之处 (22)5.3 下一阶段计划与安排 (22)第一章引言精密GPS动态测量采用载波相位差分技术,其标准测量模式为,一台GPS接收机置于已知点,作为基准站来进行静态测量,另一台GPS接收机置于载体上,作为流动站来进行动态测量。
rtklib中文说明(部分)
The following instructions shows the way to utilize the library of RTKLIB in user AP.下面的说明显示在用户rtklib AP利用库的方式(1)Add the following include directive to the source program of user AP.(2)#include ""(3)Set the following compiler option to add RTKLIB source directory path to compiler include paths.(4)-I rtklib_<ver>\src(5)Add the necessary RTKLIB library source files to source programs set for the AP build. Refer Appendix(6)C Library APIs for the library function list and source programs provided by RTKLIB.Appendix A CUI Command ReferencesRTKRCVSYNOPSIS 简介rtkrcv [-s][-p port|-d dev][-o file][-t level]DESCRIPTIONA command line version of the real‐time positioning AP by RTKLIB. To start or stop RTK server, toconfigure options or to print solution/status, login a console and input commands. As default, stdin/stdoutare used for the console. Use ‐p option for network login with telnet protocol. To show the availablecommands, type or help on the console. The initial processing options are loaded from defaultconfiguration file . To change the file, use ‐o option. To configure the processing options, editthe configuration file or use set, load or save command on the console. To shutdown the program, useshutdown command on the console or send the USR2 signal to the process. For configuration file, refer .通过rtklib的实时‐时间定位命令行版本,启动或停止RTK服务器,配置选项或打印解决方案/状态,登录控制台,输入命令。
海星达iRTK系列产品使用说明书
中海达iRTK3智能RTK系统使用说明书A0
◇ 新一代超小型智能RTK,配备全新高效的智能实时内核平台; ◇ 北斗全星座系统,支持BDS、GPS、GLONASS多系统导航定位; ◇ 超小型化零相位天线; ◇ 内置4.0标准长距离双模蓝牙,向下兼容蓝牙2.1标准; ◇ 内置8GB大容量数据存储器; ◇ 配备iHand20 全强固智能手薄或工业级平板电脑; ◇ NFC闪触配对连接接收机并自启动手簿软件; ◇ 采用手簿控制器接收差分; ◇ 专为Android系统开发定制的Hi-Survey智能测量手簿软件; ◇ 一键多功能; ◇ 全新超小型机身,镁铝合金结构,更强固。
附表 1 出厂默认参数.............................................................................24
IV
iRTK3 智能 RTK 系统使用说明书
附表 2 关键零部件信息.........................................................................25
2、登陆中海达官方网站:,在“下载中心”→ “用户手册”→“测绘产品”里即可下载该电子版说明书。
您的建议
如果您对我们的产品有什么建议和意见,欢迎您联系我们。您的反馈 信息,我们产品的质量将会有很大的提高。
III
目录
目录
产品简介 ...................................................................................................... 1 引言 .....................................................................................................2 产品特点 .............................................................................................2 注意事项 .............................................................................................2
RTKLIB开发文档
软件开发文档软件名称RTKPOST项目组成员王会、刘琦起止日期2017年6月20日至2017年8月15日目录1.项目论证1.1目标任务根据比赛要求,经过小组讨论,我们选择了RTKLIB进行二次开发。
RKTLIB是全球导航卫星系统GNSS的标准&精密定位开源程序包,RKTLIB由日本东京海洋大学的高须知二开发。
RTKLIB 主要功能有:(1)支持多个GNSS系统的标准和精密定位算法,包括GPS,GLONASS,Beidou,Galileo,QZSS和SBAS。
(2)支持多种GNSS实时和后处理定位模式:单点定位、DGPS/DGNSS,动态RTK、静态RTK、移动基站、PPP。
(3)支持多种GNSS标准格式和协议:RINEX2.10、RINEX2.11、RINEX2.12、RINEX3.00、RINEX3.01、RINEX3.02、RTCM2.3、RTCM3.1、RTCM3.2、BINEX、NTRIP、NMEA0183、SP3、ANTEX1.4、IONEX1.0、NGSPCV、EMS2.0。
(4)支持多种GNSS接收机专有数据协议格式:NovAtel:OEM4/V/6,OEM3,OEMStar、SuperstarII、Hemisphere、Crescent、u‐blox:LEA-4T/5T/6T、SkyTraq、JAVAD、GW10-II/III 和NVS。
(5)支持外部通信:Serial、TCP/IP、NTRIP、本地日志文件(记录和播发)和FTP/HTTP。
(6)提供许多函数库和API(applicationprograminterfaces):卫星和导航系统函数、矩阵和向量函数,时间和字符串函数、坐标的转换,输入和输出函数、调试跟踪函数、平台依赖函数、定位模型、大气模型、天线模型、地球潮汐模型、大地水准面模型、基准转换、RINEX函数、星历和时钟函数、精密星历和时钟、接收机原始数据函数、RTCM函数,解算函数、流数据输入和输出函数、整周模糊度解算、标准定位、精密定位、后处理定位(解算)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.文件目录结构
\app-- APs构建环境 \bin --可执行二进制APs和windows链接库 \data-- APs样本数据 \doc --文档文件
\lib --库生成环境 \src --RTKLIB库的源程序
\test--测试程序和数据 \util-- 实用程序工具
2.\bin\rtklaunch.exe 应用程序启动器
3.RTKNAVI实时定位结算
输入GPS / GNSS接收机原始观测数据,实时进行导航处理。
3.1执行\bin\rtknavi.exe
3.2用RTKNAVI进行实时定位必须输入GPS/GNSS接收机原始观测数据和卫星星历,点击I进入输入流对话框
检查设置Rover、Basestation、Correction三个选项的设置,如果设
置定位模式,只选择一个,基站和校正并不需要。
流类型可有从以下选项中选择
(a)Serial :串口输入数据
(b)TCP Client :连接到一个TCP服务器,通过TCP连接输入数
据
(c)TCP Server :接受一个TCP客户端连接和通过TCP连接的输
入数据
(d)NTRIP Client :连接一个NTRIP caster输入数据
(e)File :日志文件中输入数据。
[.conf]
(f)FTP :通过FTP下载一个文件后输入数据
(g)HTTP :通过(a) HTTP 下载一个文件后输入数据
3.3选择流类型为?Serial?(连续的)点击...按钮设置选项
3.4在流类型中如果你选择了SerialTCP Client或者TCP Server作为类型,你可以通过流设置GPS / GNSS接收机启动和关闭命令,设置命令,按下“Cmd?标签下的…按钮。
在?Serial/TCP Commands?对话框中进行设置,可以加载和保存命令
3.5流类型中设置类型为?File?可以设置文件输入路径,数据为原始数据,还可以设置时间
3.6设置输出流格式,点击O按钮,弹出 ?Output Streams?对话框,设置类型,
3.7类型选择?File?文件路径中的一些关键词将被日期和时间代替,按下按钮可以查看,选择?Swap Intv?输出文件在特定的周期内替换
3.8输出一个输入流作为路径日志,点击按钮,弹出 ?Log Streams? 对话框,和 ?Output Streams?对画框一样路径被关键词替换
3.9设置完成后,点击Start按钮。
完成后灰色代表没有被使用,橙色意味着等待连接,深绿色意味着已连接或正在进行,浅绿色意味着数据活跃,红色意味着
通信错误发生
窗口右侧显示SNR(signal to noise ratio)噪声比信号
又上角标示
GPS(G),GLONASS(R), Galileo(E), QZSS(J), BeiDou(C) SBAS(S).
"OPtions"->"Misc"->"Solution Font"改变字体设置
4.RTKPOST后处理分析操作
RTKPOST输入的是标准的RINEX2.10,2.11,2.12,3.003.01,3.02观测数据,(GPS,GLONASS,Galileo,QZSS,BeiDou and SBAS)导航电文文件,可以进行各种模
、静态的、动态的、精密单点
式的定位分析,主要包括有单点定位、DGPS/DGNSS
静态和精密单点动态定位
4.1执行bin\rtkpost.exe
4.2输入RINEX流动站的观测数据路径点击…
如果是相对定位模式,还要输入基准值接收机观测数据
?Solution?设置输出文件路径
4.3点击Options,进行处理参数设置
4.4点击“Execute”开始数据分析计算,当出现“done”表示处理完成 处理过程中要停止,点击"Abort".
4.5处理完成后点击"view"可以查看数据,plot可以可视化数据。
,点击打开文档。
4.6点击可以打开RTKPLOT
5.RTKCONV转换原始数据为RINEX格式
5.1执行\bin\rtkconv.exe
第一栏原始数据路径,?Output Directory?数据输出文件路径设置,窗口最上端设置开始时间,结束时间, ?Interval?时间间隔、
5.2点击Options,设置RINEX参数,在"RinexName"上打勾,输出文件路径符合RINEX文件名,
5.3在"Options"窗口中,点击"Mask"可以对观测数据类型设置
5.4点击"Convert"开始数据转换,
6.RTKPLOT可视化解算
6.1执行bin\rtkplot.exe
第一个绘画类型选项
Sat vis文星可见数 Skyplot星空图 DOP/NSat精度因子相对误差 SNR/MP/EL 信噪比卫星信号强度/多路径/高度角
第二个质量标志
6.2点击?File?‐?Open Solution1?选择文件
颜色、线条、格网、标签设置可以点击菜单 ?Edit?->?Options?
6.3执行?File?‐?Open Map Image?,可以查看JPEG图像
6.4调整图片点击菜单Edit->Map Image
6.5增加处理文件?File?‐?Open Solution2?,选择工具条上的转换视图
6.6点击菜单 ?Edit? ‐ ?Time Span/Interval?,进行时间设置
6.7执行Edit? ‐ ?Solution Source?,已文本格式查看数据
6.8绘出实时结算执行 ?File?‐?Connection Settings?,在 ?Connection Setting?窗口中设置参数
断开选择?File?‐?Disconnect?
7.RTKPLOT可视化观测数据
7.1执行?File? -->?Open Obs Data? 绘画观测数据
?File? ‐ ?Open Nav Messages?打开导航电文
7.2执行?Edit? ‐ ?Obs Data Source? or ?Obs Data QC?
可以已文本形式查看数据8. RTKGET下载数据
8.1 bin\rtkget.exe
8.2点击Option设置参数
8.3 选择下载数据类型
8.4 选择站名
8.5点击Download开始下载
8.6最后一栏显示下载信息。
? _ ? 表示正在进行,? o ?表示下载完成? . ? 表示跳过,? x ? 表示没有数据下载错误
8.7下载完成后点击Files,可查看下载目录,。