2010机械原理[附]
机械原理试题(28、B4)

2009 ~2010学年 第 二 学期一 二 三 四 五 六 七 八一、平面机构结构分析(15分)1. 在图1-1所示机构中,凸轮为一圆盘,铰链A 、B 、C共线,AB =BC =BD 。
(1)计算该机构自由度,请明确指出机构中的复合铰链、局部自由度或虚约束;(9分)(2)画出该机构的低副替代机构。
(3分)2. 试画出图1-2所示机构的基本杆组(必须将构件代号标注在基本杆组中),并确定机构的级别。
(3分)二、平面连杆机构分析与设计(30分)1. 确定图2-1所示机构在图示位置的全部瞬心。
若曲柄1的角速度ω1已知,写出计算构件3的角速度ω3的表达式;(8分)2. 画出机构在图示位置的传动角γ;(2分)3. 在图2-2所示机构中,已知1ϕ=45°,1ω=10rad/s ,逆时针方向,l AB =400mm ,封线密15 2 467 38 图1-24C B132ω1A图2-1B DC A J F E ' IG K O H 图1-1 Eγ=60°,试用相对运动图解法求构件2的角速度2ω、构件3的速度v 3和加速度a 3(要求列出矢量方程,画出速度多边形和加速度多边形);(10分)4.给定摇杆长度及两极限位置如图2-3所示,图中,μl =0.002m/mm ,要求机构的行程速比系数K =1.5,机架长度l AD =45mm ,试设计曲柄摇杆机构(直接在图2-3上作图,保留作图线,求出l AB 和l BC 的值)。
(10分)三、凸轮机构分析(10分)1. 试在图3中画出凸轮的理论轮廓曲线、基圆、从动件的最大行程h 、凸轮逆时针转至轮廓线上点A (点A 位于凸轮轮廓线的直线段上)与滚子接触时,从动件位移s 和机构压力角α;(6分)2. 凸轮的推程角Φ =?、回程角Φ'=?(4分)四、齿轮机构参数计算(10分)在图4所示齿轮机构中,己知各直齿圆柱齿轮模数均为2mm ,各轮的齿数分别为:z 1=15,z 2=32,z 2'=20,z 3=30。
机械原理
四、带传动
• 1.带传动的工作原理:依靠带与带轮之间的 摩擦力来传递运动和动力。 • 2.带传动的传动比:两轮角速度之比,也是 两轮直径之比。
四、带传动
• 3. 带传动的特点: • 1) 结构简单,便于维护,适于两轴中 心 距较大的场合; • 2)富有弹性,能缓冲、吸振; • 3)过载打滑,起到安全保护作用; • 4)不能保证准确的传动比; • 5)外廓尺寸大,传动效率低。
七、齿轮传动
• 5.齿轮轮齿的加工方法 • 切削加工齿轮根据齿形形成的原理不同,可以 分为仿型法和展成法两类。 • 1)仿型法 • 仿型法是利用与齿廓曲线相同的成型刀具在 机床上直接切除齿槽加工出齿形的加工方法。通 常在普通铣床上用盘状或指状铣刀辅以分度头进 行加工。 • 优点:不需要专用机床,在普通铣床上就可完成 • 缺点:加工精度不高,主要用于单件修配。
七、齿轮传动
• 1. 齿轮传动的特点 • 1)能保证恒定的瞬时传动比; • 2)传递的功率和速度范围大; • 3)传动效率高; • 4)结构紧凑,工作可靠,使用寿命长; • 5)制造和安装精度要求高; • 6)不能实现无级变速; • 7)不适于中心距较大的场合。
七、齿轮传动
• 2. 齿轮传动的基本要求 • 传动平稳,承载能力大
八、蜗杆传动
2. 蜗杆传动基本参数 1)模数 蜗杆是指蜗杆的轴向模数,蜗轮 的模数是指端面模数。蜗轮的端面模数等 于其配对的蜗杆的轴向模数。 • 2)齿形角 • 3)通常情况下,蜗杆是主动件,蜗轮是从动 件。
机械原理
2010年5月
一、机器的组成
• 机器基本上是由动力部分、工作部分和传 动装置三部分组成。要自动化机器中,还 有自动控制部分。 • 1. 动力部分——是机器动力的来源,常 用的有电动机、内燃机和空气压缩机。
机械原理ppt课件

随着数学、力学等学科的发展,机械 原理开始形成较为完整的理论体系。
02
机构的结构分析
机构组成要素及运动副
机构组成要素
包括构件、运动副和约束等,是 机构的基本组成部分。
运动副
两构件直接接触并能产生一定相对 运动的连接称为运动副。根据接触 形式的不同,运动副可分为低副和 高副两类。
提高机械效率的方法
通过优化机械设计、采用高性能材料、降低摩擦和磨损等方式可 以提高机械效率。
机械的自锁
自锁现象的定义
自锁现象是指机械在某些特定条 件下,无法依靠自身力量进摩 擦系数、负载等因素有关。当机 械处于自锁状态时,无论输入多 大的力,机械都无法产生运动。
挠性转子的平衡方法
挠性转子的特点
与刚性转子相比,挠性转子在旋转过程中会发生弹性变形,导致不平衡量的动态变化。
挠性转子的平衡方法
主要包括影响系数法和模态平衡法。影响系数法通过测量和计算得到各校正平面上的不 平衡量,然后进行加重或去重操作;模态平衡法则针对挠性转子的振动模态进行平衡处
理。
机械速度波动的调节
感谢观看
克服自锁的方法
克服自锁的方法包括改变机械的 几何形状、增加驱动力矩、减小 负载等。在实际应用中,需要根 据具体情况选择合适的克服自锁
的方法。
06
机械的平衡与调速
机械平衡的目的及分类
机械平衡的目的
消除或减小因机械运动而产生的振动、噪音和不必要的动载荷,提高机械运转的平 稳性和可靠性。
机械平衡的分类
解析法的特点
精度高、适用范围广,可以处理复杂 机构的运动分析问题。
机械原理书目(2010-2013)
1、廖汉元,孔建益主编.机械原理(第3版). 北京:机械工业出版社,2013
2、孙恒,陈作模,葛文杰主编.机械原理(第8版). 北京:高等教育出版社,2013
3、张志强,黄小龙主编.机械原理习题集. 北京:机械工业出版社,2013
4、汪建晓,孙传琼主编.机械原理课程设计. 武汉:华中科技大学出版社,2013
5、张伟社主编.机械原理(第3版). 西安:西北工业大学出版社,2013
6、李素有主编.机械原理课程设计. 西安:西北工业大学出版社,2012
7、陈晓华主编.机械原理学习指导. 北京:高等教育出版社,2012
8、师忠秀主编.机械原理. 北京:机械工业出版社,2012
9、张春林,张颖主编.机械原理(英汉双语). 北京:机械工业出版社,2012
10、王德伦,高媛主编.机械原理. 北京:机械工业出版社,2011
11、高中庸等主编.机械原理. 武汉:华中科技大学出版社,2011
12、张策主编.机械原理与机械设计(上、下册). 北京:机械工业出版社,2011
13、王春燕,陆凤仪主编.机械原理. 北京:机械工业出版社,2011
14、裘建新主编.机械原理课程设计. 北京:高等教育出版社,2010
15、叶仲和,蓝兆辉,(英)史密斯著.机械原理. 北京:高等教育出版社,2010
16、黄茂林主编.机械原理(第2版). 北京:机械工业出版社,2010。
南京航空航天大学机械原理2010,2012-2015,2018年考研初试真题

科目代码:851科目名称:机械原理 第1页 共3页 C B A 1 题一图 2 3 4 南京航空航天大学
2018年硕士研究生入学考试初试试题(
A 卷 ) 科目代码:
851 满分: 150 分 科目名称: 机械原理 注意: ①认真阅读答题纸上的注意事项;②所有答案必须写在答题纸上,写在本试题纸或草稿纸上均无
效;③本试题纸须随答题纸一起装入试题袋中交回!
一、简要回答下列各题(共50分)
1.机构具有确定运动的条件是什么?什么是约束,机构中各构件的约束是如何产生的?(8分)
2.何谓斜齿圆柱齿轮的当量齿轮?对于螺旋角为β、齿数为z 的斜齿圆柱齿轮,试写出其当量齿数的表达式。
(8分)
3.机械平衡的目的是什么?(8分)
4.简述飞轮调速原理。
(8分)
5.行星齿轮传动中各齿轮的齿数及行星轮个数须满足哪4个基本条件?(8分)
6.机构压力角是如何定义的?画出题一图示位置机构的压力角 。
(10分)
二、已知题二图所示的机构,要求:
(1)计算图示机构的自由度;(8分)
(2)画出其高副低代后的机构运动简图;
(6分)
(3)选择适当的原动件,画出组成机构
的杆组,并判断机构的级别。
(10分)
A B C D D E F
G H I 题二图。
机械原理ppt课件

汇报人:
xx年xx月xx日
• 机械原理概述 • 机械系统组成 • 机械运动学与动力学 • 常用机构分析 • 机械系统设计 • 机械系统优化与仿真
目录
01
机械原理概述
机械原理的定义与重要性
定义
机械原理是研究机械系统运动规 律、力的传递和能量转换的一门 学科。
重要性
机械原理是机械工程学科的基础 ,对于机械设计、制造、维修和 性能优化具有重要意义。
01
02
03
汽车工业
汽车中的发动机、变速器 和底盘等关键部件的设计 和制造都涉及到机械原理 的应用。
航空航天
飞机和火箭等航空航天器 的设计和制造进程中,需 要运用机械原理来确保其 稳定性和可靠性。
机器人技术
机器人技术中需要运用机 械原理来设计机器人的运 动机构和控制机构,实现 精确的运动控制。
02
总结词
具有较大的传递力矩的能力。
详细描写
由于连杆机构中的构件之间是接触传递运动和力的,因此 能够承受较大的力矩,适用于传递较大功率的场合。
总结词
可以实现多种复杂的运动轨迹。
详细描写
通过改变连杆机构的构件尺寸、运动副的配置以及输入构 件的运动规律,可以实现多种复杂的运动轨迹,如往复摆 动、连续曲线等。
总结词
适用于高速、中等到重载的传动场合。
详细描写
凸轮机构适用于高速、中等到重载的传动场合,因为凸 轮与从动件之间的接触面积较小,能够承受较大的单位 压力,同时也能实现高速运动。
齿轮机构
总结词
实现回转运动最常用的一种机构。
详细描写
齿轮机构是实现回转运动最常用的机构之一,由两个或多 个齿轮通过齿廓相互啮合来实现回转运动,具有较高的传 动效率和精度。
机械原理 凸轮机构及其设计
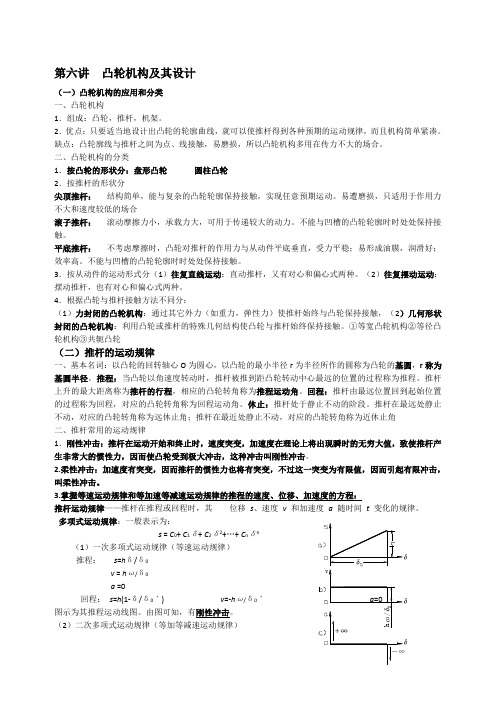
第六讲凸轮机构及其设计(一)凸轮机构的应用和分类一、凸轮机构1.组成:凸轮,推杆,机架。
2.优点:只要适当地设计出凸轮的轮廓曲线,就可以使推杆得到各种预期的运动规律,而且机构简单紧凑。
缺点:凸轮廓线与推杆之间为点、线接触,易磨损,所以凸轮机构多用在传力不大的场合。
二、凸轮机构的分类1.按凸轮的形状分:盘形凸轮圆柱凸轮2.按推杆的形状分尖顶推杆:结构简单,能与复杂的凸轮轮廓保持接触,实现任意预期运动。
易遭磨损,只适用于作用力不大和速度较低的场合滚子推杆:滚动摩擦力小,承载力大,可用于传递较大的动力。
不能与凹槽的凸轮轮廓时时处处保持接触。
平底推杆:不考虑摩擦时,凸轮对推杆的作用力与从动件平底垂直,受力平稳;易形成油膜,润滑好;效率高。
不能与凹槽的凸轮轮廓时时处处保持接触。
3.按从动件的运动形式分(1)往复直线运动:直动推杆,又有对心和偏心式两种。
(2)往复摆动运动:摆动推杆,也有对心和偏心式两种。
4.根据凸轮与推杆接触方法不同分:(1)力封闭的凸轮机构:通过其它外力(如重力,弹性力)使推杆始终与凸轮保持接触,(2)几何形状封闭的凸轮机构:利用凸轮或推杆的特殊几何结构使凸轮与推杆始终保持接触。
①等宽凸轮机构②等径凸轮机构③共轭凸轮(二)推杆的运动规律一、基本名词:以凸轮的回转轴心O为圆心,以凸轮的最小半径r为半径所作的圆称为凸轮的基圆,r称为基圆半径。
推程:当凸轮以角速度转动时,推杆被推到距凸轮转动中心最远的位置的过程称为推程。
推杆上升的最大距离称为推杆的行程,相应的凸轮转角称为推程运动角。
回程:推杆由最远位置回到起始位置的过程称为回程,对应的凸轮转角称为回程运动角。
休止:推杆处于静止不动的阶段。
推杆在最远处静止不动,对应的凸轮转角称为远休止角;推杆在最近处静止不动,对应的凸轮转角称为近休止角二、推杆常用的运动规律1.刚性冲击:推杆在运动开始和终止时,速度突变,加速度在理论上将出现瞬时的无穷大值,致使推杆产生非常大的惯性力,因而使凸轮受到极大冲击,这种冲击叫刚性冲击。
武汉科技大学机械原理2010

机械原理是机械设计专业的一门重要课程,它是研究机械运动和力的学科。
机械原理的研究对象是机械系统,包括机械结构、机械运动和机械力学性质等方面。
本文以武汉科技大学机械原理2010为例,介绍机械原理的相关知识点。
1. 机械结构
机械结构是机械设计中的基本概念,是由零部件组成的机械系统。
机械结构有多种分类方式,如杆件、板件、壳体等。
机械结构的选择应该充分考虑应用场合和使用条件,符合机械设计的要求。
2. 运动学
机械运动是机械原理的核心内容之一,是研
究机械系统运动规律和运动参数的学科。
机
械运动可以按运动路径分为平面运动和空间
运动,按运动轨迹分为直线运动和曲线运动。
机械运动的研究方法包括矢量法、解析法和
综合方法等。
3. 力学
机械力学是研究机械系统在力的作用下受力
情况和运动情况的学科。
机械力学包括静力
学和动力学。
静力学主要研究力对静止物体
的影响,动力学则研究力对运动物体的影响。
机械力学的研究方法包括静力学平衡方程、动力学运动方程和能量方法等。
4. 控制理论
机械系统的运动和力的变化是由控制方式所决定的,控制理论为机械系统的设计和实现提供了科学的数学基础。
控制理论包括控制系统的建立和控制器的设计等方面。
控制器的设计需要考虑多种因素,如机械系统的性能指标、控制的精度要求和控制器的各项参数等。