结构力学PF程序报告
结构力学课程设计报告(推荐五篇)
结构力学课程设计报告(推荐五篇)第一篇:结构力学课程设计报告结构力学课程设计报告经过一周的学习和上机实习,我完成了老师布置的任务,也掌握了如何使用结构力学求解器进行杆系结构的分析计算,进一步掌握结构力学课程的基本理论和基本概念。
同时,通过这次的实习,我阅读了很多相关的设计框图并编写和调试了结构力学程序,进一步提高了运用计算机进行计算的能力,为后续课程的学习、毕业设计及今后工作中使用计算机进行计算打下良好的基础。
这次结构力学实习让我们充分的运用了所学过的结构力学理论知识,通过学习结构力学求解器的使用方法,让我理解了许多过去没搞明白的结构力学知识,并将这些知识融会贯通,形成了一个较好的对整个制作过程的把握。
一个星期的结构力学实习过程让我得到的不仅仅是通过我们自己努力所取得的成果,还让我收获了许多平时学习生活中没学到的东西。
首先,让我学会了如何把书本上的知识联系到实际设计中去.以前只知道抱着书本死啃,却没有参透其中的真正含义,当我们面对真正的问题急待解决时却无从下手,所以即使你学的再好也终究会被现实所淘汰.这也正印证了那句哲理:实践才是检验真理的唯一标准.通过这次难忘的经历让我深刻的体会到:理论与实际相结合是很重要的,只有理论知识是远远不够的,只有把所学的理论知识与实践相结合起来,从理论中得出结论,才能真正为社会服务,从而提高自己的实际动手能力和独立思考的能力。
其次,通过这次设计还让我学到了许多平时课本中所未涉及到的内容,比如在做题计算过程中所必须用到的公式编辑器等等。
总之,如果你自己不去探索,也许你永远都不能接触到这些东西。
最后,同学之间的互助和老师的指点也是我能完成这次实习的重要因素。
但也发现了自身很多的不足,我对结构力学的许多知识的认识还停留在表面,并没有深度探究这些知识的联系,这让我花了不少时间,有待改进。
还有对计算结果数据的含义以及其实际运用还了解的不够透彻,比如像节点坐标、柱杆件关联号、梁杆件关联号等信息还不能巧加运用,仍需进一步学习。
有限元教材PFF程序使用说明C版
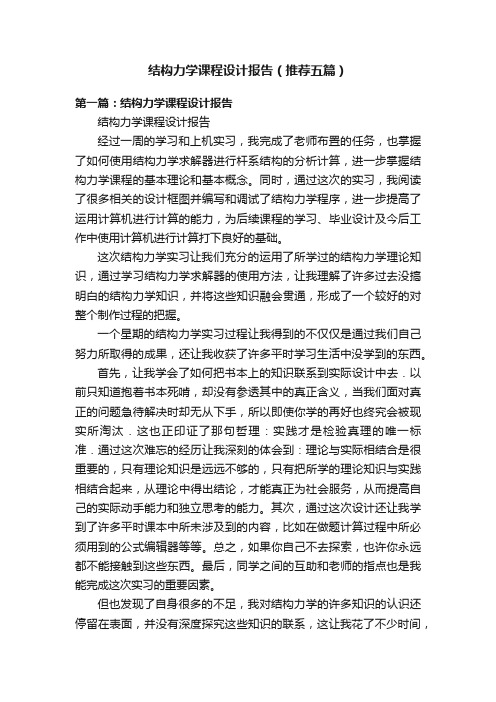
1.8 平面刚架程序设计1.8.1 程序说明及总流程图依据前述平面刚架矩阵位移法原理,本节使用Visual C++ 6.0编译器编制了平面刚架先处理法计算程序PFF,该程序未使用C++面向对象的编程方法,而仍沿用兼容C的结构化程序设计方法,以便和本科生先修课程C语言相容。
本程序不建议使用TC++3.0及更低版本的编译器编译。
一.PFF的主要功能和特点(1)输入单元编号、结点编号和结点位移分量统一编码,单元材料信息;(2)先处理法形成结构刚度矩阵和综合结点荷载列阵;(3)Gauss消元法解线性代数方程组;(4)计算并输出结点位移和单元杆端力;二.PFF的使用方法(1)输入输出数据文件PFF从原始数据文件中读取结构的离散化信息,经计算后,将结果输出到结果数据文件中。
运行编译好的PFF可执行程序,会提示“Please input primary data file name!”,这时输入事先准备好的原始数据文件名,回车后,提示“Please input calculation result file name!”,输入一个文件名,PFF会自动以该文件名生成结果数据文件。
原始数据文件最好同PFF可执行程序放置在同一文件夹中,结果数据文件不应是已有的文件,而必须由PFF自动生成。
两文件建议使用英文和数字命名。
在输入文件名时,应包含后缀。
C语言以0为数组各维的开始下标,称为0基数组;而一般习惯是以1为数组各维的开始下标,称为1基数组。
PFF源程序编制时,仍以C语言为标准,使用0基数组,即PFF 程序内部处理机制是0基的。
但是为方便读者,原始数据文件和输出数据文件则按一般习惯,使用1基数组对结点、单元、结点位移分量、结点荷载和非结点荷载进行编号,即PFF程序外部表现是1基的。
(2)原始数据文件的格式下面依行序说明原始数据文件输入数据的含义:①总体信息ne,nj,n,np,nf,ene——单元总数;nj——结点总数;n——结点位移未知量总数;np——结点荷载总数;nf——非结点荷载总数;e——弹性模量②结点坐标(x[i],y[i])(i=0;i<nj;i++)x[i]——结点i+1的x坐标;y[i]——结点i+1的y坐标。
毕业论文:有限单元法程序报告

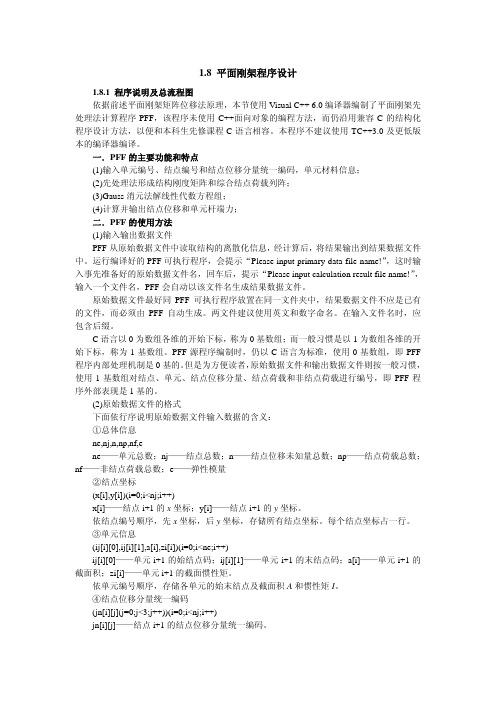
目录程序一:平面刚架静力分析程序(PF.FOR) (17)程序二:平面三节点有限元程序 (17)程序三:四节点矩形薄板单元程序 (24)程序一:平面刚架静力分析程序(PF.FOR)已知各杆截面均为矩形,柱截面宽0.4m,高0.5m, 梁截面宽0.4m,高0.4m,各杆E=3.65×104 MPa。
图2节点、单元编号如下图3,1.2.3…..为节点号,①②③……为单元号:图3总共有13个节点,13个单元。
计算源程序如下:! PF.FOR (A program for analysis of plane frame)! Version 6.3 2004! Main program reads the control data & organizes the whole ! calculation by calling subroutines.DIMENSION W(80000)CHARACTER IDFN*20,TITLE(5)*72READ(*,'(A12)')IDFNOPEN(3,FILE=IDFN,STATUS='OLD')READ(3,'(A72)')(TITLE(M),M=1,5)READ(3,*)E,NM,NJ,NS,NLCL1=1L2=L1+NML3=L2+NML4=L3+NML11=L4+NML12=L11+NJL21=L12+NJL22=L21+NSL31=L22+NSL41=L31+6*NMCALL IOMJS(TITLE,E,NM,NJ,NS,NLC,W(L1),W(L2),W(L3),&W(L4),W(L11),W(L12),W(L21),W(L22))CALL LCVCT (NM,W(L1),W(L2),W(L31),NJ,N)CALL LCDIA (NM,N,W(L31),W(L41),W(L41),W(L41),MAXBDW,NA) L51=L41+NL52=L51+36L53=L52+NA*2L54=L53L61=L54+N*2NW=L61+6*NM-1WRITE (*,1)NA,NW1 FORMAT(/40X,'( NA=',I6,' )',/40X,'( NW=',I6,' )')CALL FORMA (E,NM,NJ,N,NA,W(L1),W(L2),W(L3),W(L4),&W(L11),W(L12),W(L31),W(L51),W(L41),W(L52)) CALL AS(NS,N,NA,W(L21),W(L41),W(L52))CALL LDLT(N,NA,W(L41),W(L52),W(L53))DO 100 LC=1,NLCREAD (3,*)NLJL62=L61+NLJL63=L62+NLJL64=L63+NLJL71=L61L81=L71+6*NMCALL B0(LC,N,NLJ,W(L54))IF(NLJ.NE.0) CALL IOLJB(N,NLJ,W(L61),W(L62),&W(L63),W(L64),W(L54))READ(3,*)NLML82=L81+NLML83=L82+NLML84=L83+NLMCALL F0(NLM,NM,W(L71))IF(NLM.NE.0) CALL IOLMFB(NM,NJ,N,NLM,W(L81),&W(L82),W(L83),W(L84),W(L1),W(L2),W(L11),&W(L12),W(L31),W(L71),W(L54))CALL BS(NS,N,W(L21),W(L22),W(L54))CALL SLVEQ(N,NA,MAXBDW,W(L41),W(L52),W(L54))CALL OJD(NJ,N,W(L54))CALL COTF(E,NM,NJ,N,W(L1),W(L2),W(L3),W(L4),&W(L11),W(L12),W(L31),W(L54),W(L71)) NW=L84+NLM-1WRITE(*,1)NA,NW100 CONTINUEWRITE(*,'(/)')ENDSUBROUTINE IOMJS(TITLE,E,NM,NJ,NS,NLC,IST,IEN,&AR,RI,X,Y,IS,VS)! Read data of members, joints, supports & print them DIMENSION IST(NM),IEN(NM),AR(NM),RI(NM),&X(NJ),Y(NJ),IS(NS),VS(NS)CHARACTER TITLE(5)*72WRITE(*,'(/)')WRITE(*,1)(TITLE(M),M=1,5)1 FORMAT(1X,A72)WRITE(*,2)E,NM,NJ,NS,NLC2 FORMAT(/13X,'The Input Data'&//10X,'The General Information'&//6X,'E',9X,'NM',5X,'NJ',5X,'NS',5X,'NLC'& /1X,1PE10.3,4I7)READ(3,*)(IST(M),IEN(M),AR(M),RI(M),M=1,NM)WRITE(*,3)3 FORMAT(/10X,'The Information of Members'&//1X,'member',2X,'start',2X,'end',9X,'A',15X,'I') WRITE(*,4)(M,IST(M),IEN(M),AR(M),RI(M),M=1,NM)4 FORMAT(1X,I4,I8,I6,1P2E16.6)READ(3,*)(X(M),Y(M),M=1,NJ)WRITE(*,5)5 FORMAT(/10X,'The Joint Coordinates'&//1X,'joint',11X,'X',17X,'Y')WRITE(*,6)(M,X(M),Y(M),M=1,NJ)6 FORMAT(1X,I4,2F18.6)READ (3,*)(IS(M),VS(M),M=1,NS)WRITE(*,7)7 FORMAT(/10X,'The Information of Supports'&//4X,'IS',9X,'VS')WRITE(*,8)(IS(M),VS(M),M=1,NS)8 FORMAT(1X,I5,F16.6)RETURNENDSUBROUTINE LCVCT(NM,IST,IEN,LV,NJ,N)! Determine location vector of elementDIMENSION IST(NM),IEN(NM),LV(6,NM)DO 100 M=1,NMI=IST(M)*3J=IEN(M)*3LV(1,M)=I-2LV(2,M)=I-1LV(3,M)=ILV(4,M)=J-2LV(5,M)=J-1LV(6,M)=J100 CONTINUEN=NJ*3RETURNENDSUBROUTINE LCDIA(NM,N,LV,MIN,IBDW,LD,MAXBDW,NA)! Determine location of diagonal elements of global stiffness ! matrix ADIMENSION LV(6,NM),MIN(N),IBDW(N),LD(N)DO 100 I=1,NMIN(I)=I100 CONTINUEDO 400 M=1,NMMINLV=LV(1,M)DO 200 I=2,6IF (LV(I,M).LT.MINLV) MINLV=LV(I,M)200 CONTINUEDO 300 I=1,6IF (MINLV.LT.MIN(LV(I,M))) MIN(LV(I,M))=MINLV300 CONTINUE400 CONTINUEMAXBDW=0DO 500 I=1,NIBDW(I)=I-MIN(I)+1IF(IBDW(I).GT.MAXBDW) MAXBDW=IBDW(I)500 CONTINUELD(1)=IBDW(1)DO 600 I=2,NLD(I)=LD(I-1)+IBDW(I)600 CONTINUENA=LD(N)RETURNENDSUBROUTINE RLCS(M,NM,NJ,IST,IEN,X,Y,RL,C,S)! Calculate length, cosine & sine of member DIMENSION IST(NM),IEN(NM),X(NJ),Y(NJ)I=IST(M)J=IEN(M)X1=X(J)-X(I)Y1=Y(J)-Y(I)RL=SQRT(X1*X1+Y1*Y1)C=X1/RLS=Y1/RLRETURNENDSUBROUTINE KEBAR (M,E,NM,NJ,IST,IEN,AR,RI,&X,Y,C,S,E1,E2,E3,E4)! Calculate element stiffness matrix along local axes DIMENSION IST(NM),IEN(NM),X(NJ),Y(NJ),AR(NM),RI(NM) CALL RLCS (M,NM,NJ,IST,IEN,X,Y,RL,C,S)E1=E*AR(M)/RLE2=12.0*E*RI(M)/(RL*RL*RL)E3=0.5*E2*RLE4=0.6666667*E3*RLRETURNENDSUBROUTINE KE (M,E,NM,NJ,IST,IEN,AR,RI,X,Y,AE)! Calculate element stiffness matrix along global axes DIMENSION IST(NM),IEN(NM),AR(NM),RI(NM),&X(NJ),Y(NJ),AE(6,6)CALL KEBAR (M,E,NM,NJ,IST,IEN,AR,RI,X,Y,C,S,E1,E2,E3,E4) A1=E1*C*C+E2*S*SA2=(E1-E2)*C*SA3=E1*S*S+E2*C*CA4=E3*SA5=E3*CA6=E4AE(1,1)=A1AE(2,1)=A2AE(2,2)=A3AE(3,1)=-A4AE(3,2)=A5AE(3,3)=A6AE(4,1)=-A1AE(4,2)=-A2AE(4,3)=A4AE(4,4)=A1AE(5,1)=-A2AE(5,2)=-A3AE(5,3)=-A5AE(5,4)=A2AE(5,5)=A3AE(6,1)=-A4AE(6,2)=A5AE(6,3)=0.5*A6AE(6,4)=A4AE(6,5)=-A5AE(6,6)=A6RETURNENDSUBROUTINE FORMA (E,NM,NJ,N,NA,IST,IEN,AR,RI,&X,Y,LV,AE,LD,A)! Form global stiffness matrix ADIMENSION IST(NM),IEN(NM),AR(NM),RI(NM),X(NJ),Y(NJ),&LV(6,NM),AE(6,6),LD(N)DOUBLE PRECISION A(NA)DO 300 M=1,NMCALL KE (M,E,NM,NJ,IST,IEN,AR,RI,X,Y,AE)DO 200 I=1,6DO 100 J=1,IIF (LV(I,M).GE.LV(J,M)) THENA(LD(LV(I,M))-LV(I,M)+LV(J,M))&=A(LD(LV(I,M))-LV(I,M)+LV(J,M))+AE(I,J)ELSEA(LD(LV(J,M))-LV(J,M)+LV(I,M))&=A(LD(LV(J,M))-LV(J,M)+LV(I,M))+AE(I,J)END IF100 CONTINUE200 CONTINUE300 CONTINUERETURNENDSUBROUTINE AS (NS,N,NA,IS,LD,A)! Introduce support conditions into global stiffness matrix A DIMENSION IS(NS),LD(N)DOUBLE PRECISION A(NA)DO 100 M=1,NSI=3*(IS(M)/10)-3+MOD(IS(M),10)A(LD(I))=1D22100 CONTINUERETURNENDSUBROUTINE LDLT (N,NA,LD,A,T)! Solve equations (1) - decomposition of matrix A DIMENSION LD(N)DOUBLE PRECISION A(NA),T(N),SUMDO 300 I=2,NLDI=LD(I)I1=I-LDI+LD(I-1)+1DO 200 J=I1,I-1LDJ=LD(J)J1=J-LDJ+LD(J-1)+1IF(I1.GT.J1) J1=I1SUM=0.0D0DO 100 K=J1,J-1SUM=SUM+T(K)*A(LDJ-J+K)100 CONTINUET(J)=A(LDI-I+J)-SUMA(LDI-I+J)=T(J)/A(LDJ)A(LDI)=A(LDI)-T(J)*A(LDI-I+J)200 CONTINUE300 CONTINUERETURNENDSUBROUTINE SLVEQ (N,NA,MAXBDW,LD,A,B)! Solve equations (2) - forward & back substitution DIMENSION LD(N)DOUBLE PRECISION A(NA),B(N)DO 200 I=2,NLDI=LD(I)I1=I-LDI+LD(I-1)+1DO 100 J=I1,I-1B(I)=B(I)-A(LDI-I+J)*B(J)100 CONTINUE200 CONTINUEDO 300 I=1,NB(I)=B(I)/A(LD(I))300 CONTINUEDO 500 I=N-1,1,-1IMIN=I+MAXBDWIF(IMIN.GT.N) IMIN=NDO 400 J=I+1,IMINLDJ=LD(J)J1=J-LDJ+LD(J-1)+1IF(I.GE.J1) B(I)=B(I)-A(LDJ-J+I)*B(J)400 CONTINUE500 CONTINUERETURNENDSUBROUTINE B0 (LC,N,NLJ,B)! Initialize joint load vector BDOUBLE PRECISION B(N)WRITE (*,1)LC,NLJ1 FORMAT(/15X,'Loading Case',I3&//10X,'The Loadings at Joints'&//17X,'NLJ=',I4)DO 100 I=1,NB(I)=0.0D0100 CONTINUERETURNENDSUBROUTINE IOLJB (N,NLJ,ILJ,PX,PY,PM,B)! Read data of loading at joint & form joint load vector B DIMENSION ILJ(NLJ),PX(NLJ),PY(NLJ),PM(NLJ)DOUBLE PRECISION B(N)READ (3,*)(ILJ(M),PX(M),PY(M),PM(M),M=1,NLJ)WRITE (*,1)1 FORMAT(/2X,'ILJ',11X,'PX',14X,'PY',15X,'PM')WRITE (*,2)(ILJ(M),PX(M),PY(M),PM(M),M=1,NLJ)2 FORMAT(1X,I4,2F16.4,F18.5)DO 100 M=1,NLJI=ILJ(M)*3B(I-2)=PX(M)B(I-1)=PY(M)B(I)=PM(M)100 CONTINUERETURNENDSUBROUTINE F0(NLM,NM,F)! Initialize terminal forces of membersDIMENSION F(6,NM)WRITE (*,1)NLM1 FORMAT(/10X,'The Loadings at Members'&//17X,'NLM=',I4)DO 200 J=1,NMDO 100 I=1,6F(I,J)=0.0100 CONTINUE200 CONTINUERETURNENDSUBROUTINE IOLMFB(NM,NJ,N,NLM,ILM,ITL,PV,DST,&IST,IEN,X,Y,LV,F,B)! Read data of loading at member & calculate fixed-end forces, ! add equivalent joint loads to vector BDIMENSION ILM(NLM),ITL(NLM),PV(NLM),DST(NLM),IST(NM),& IEN(NM),X(NJ),Y(NJ),LV(6,NM),F(6,NM)DOUBLE PRECISION B(N)READ(3,*)(ILM(M),ITL(M),PV(M),DST(M),M=1,NLM)WRITE (*,1)1 FORMAT(/2X,'ILM',2X,'ITL',11X,'PV',12X,'DST')WRITE(*,2)(ILM(M),ITL(M),PV(M),DST(M),M=1,NLM)2 FORMAT(1X,I4,I5,F16.4,F16.6)DO 100 M=1,NLML=ILM(M)CALL RLCS (L,NM,NJ,IST,IEN,X,Y,RL,C,S) D1=DST(M)D2=RL-D1IF (ITL(M).EQ.1.OR.ITL(M).EQ.3)THENP1=PV(M)*CP2=-PV(M)*SENDIFIF(ITL(M).EQ.2.OR.ITL(M).EQ.4)THENP1=PV(M)*SP2=PV(M)*CENDIFIF(ITL(M).EQ.1.OR.ITL(M).EQ.2)THENF1=-P1*D2/RLF4=-P1-F1F2=-P2*D2*D2*(RL+2.0*D1)/(RL*RL*RL)F5=-P2-F2F3=-P2*D1*D2*D2/(RL*RL)F6=P2*D1*D1*D2/(RL*RL)ENDIFIF(ITL(M).EQ.3.OR.ITL(M).EQ.4)THENG=P2*D1*D1/(12.0*RL*RL)F3=-G*((6.0*RL-8.0*D1)*RL+3.0*D1*D1)F6=G*D1*(4.0*RL-3.0*D1)F5=-6.0*G*D1*(2.0-D1/RL)F2=-P2*D1-F5F4=-P1*D1*D1/(2.0*RL)F1=-P1*D1-F4ENDIFF(1,L)=F(1,L)+F1F(2,L)=F(2,L)+F2F(3,L)=F(3,L)+F3F(4,L)=F(4,L)+F4F(5,L)=F(5,L)+F5F(6,L)=F(6,L)+F6B(LV(1,L))=B(LV(1,L))-F1*C+F2*SB(LV(2,L))=B(LV(2,L))-F1*S-F2*CB(LV(3,L))=B(LV(3,L))-F3B(LV(4,L))=B(LV(4,L))-F4*C+F5*SB(LV(5,L))=B(LV(5,L))-F4*S-F5*CB(LV(6,L))=B(LV(6,L))-F6100 CONTINUERETURNENDSUBROUTINE BS(NS,N,IS,VS,B)! Introduce support conditions into joint load vector B DIMENSION IS(NS),VS(NS)DOUBLE PRECISION B(N)DO 100 M=1,NSI=3*(IS(M)/10)-3+MOD(IS(M),10)B(I)=VS(M)*1D22100 CONTINUERETURNENDSUBROUTINE OJD(NJ,N,B)! Print joint displacementsDOUBLE PRECISION B(N)WRITE (*,1)1 FORMAT(/13X,'The Results of Calculation'&//10X,'The Joint Displacements'&//1X,'joint',8X,'u',15X,'v',14X,'phi') WRITE (*,2)(M,B(3*M-2),B(3*M-1),B(3*M),M=1,NJ)2 FORMAT(1X,I4,1P3E16.6)RETURNENDSUBROUTINE COTF(E,NM,NJ,N,IST,IEN,AR,RI,X,Y,LV,B,F)! Calculate & print terminal forces of members DIMENSION IST(NM),IEN(NM),AR(NM),RI(NM),X(NJ),Y(NJ),&LV(6,NM),F(6,NM)DOUBLE PRECISION B(N),U1,U2,U3,U4,U5,U6WRITE (*,1)1 FORMAT(/10X,'The Terminal Forces'&//1X,'member',4X,'N(st)',6X,'Q(st)',7X,'M(st)',& 6X,'N(en)',6X,'Q(en)',7X,'M(en)')DO 100 M=1,NMCALL KEBAR(M,E,NM,NJ,IST,IEN,AR,RI,X,Y,C,S,E1,E2,E3,E4) U1=B(LV(1,M))*C+B(LV(2,M))*SU2=-B(LV(1,M))*S+B(LV(2,M))*CU3=B(LV(3,M))U4=B(LV(4,M))*C+B(LV(5,M))*SU5=-B(LV(4,M))*S+B(LV(5,M))*CU6=B(LV(6,M))F(1,M)=F(1,M)+E1*(U1-U4)F(2,M)=F(2,M)+E2*(U2-U5)+E3*(U3+U6)F(3,M)=F(3,M)+E3*(U2-U5)+E4*(U3+0.5*U6)F(4,M)=F(4,M)+E1*(U4-U1)F(5,M)=F(5,M)+E2*(U5-U2)-E3*(U3+U6)F(6,M)=F(6,M)+E3*(U2-U5)+E4*(0.5*U3+U6)WRITE(*,2)M,F(1,M),F(2,M),F(3,M),F(4,M),F(5,M),F(6,M) 2 FORMAT(1X,I4,2(2F11.3,F12.3))100 CONTINUERETURNEND输入数据文件************************************************** ** 114811150上机试题1 ** **************************************************3.65E7 13 13 12 11 2 0.2 4.1667E-32 3 0.2 4.1667E-33 6 0.16 2.1333E-32 5 0.16 2.1333E-34 5 0.2 4.1667E-35 6 0.2 4.1667E-36 9 0.16 2.1333E-35 8 0.16 2.1333E-38 9 0.2 4.1667E-37 8 0.2 4.1667E-38 10 0.16 2.1333E-310 12 0.16 2.1333E-311 13 0.2 4.1667E-30 00 100 2010 010 1010 2020 020 1020 2025 1030 030 1030 1011 012 013 041 042 043 071 072 073 0111 0112 0113 032 150 0 03 0 0 -50 10 0 0 -25 63 2 -250 54 4 -10 107 4 -10 108 2 -200 59 3 10 1010 3 10 10输出文件************************************************* * * * 114811150上机试题1 * * * *************************************************The Input DataThe General InformationE NM NJ NS NLC3.650E+07 13 13 12 1The Information of Membersmember start end A I1 12 2.000000E-01 4.166700E-032 23 2.000000E-01 4.166700E-033 3 6 1.600000E-01 2.133300E-034 25 1.600000E-01 2.133300E-035 4 5 2.000000E-01 4.166700E-036 5 6 2.000000E-01 4.166700E-037 6 9 1.600000E-01 2.133300E-038 5 8 1.600000E-01 2.133300E-039 8 9 2.000000E-01 4.166700E-0310 7 8 2.000000E-01 4.166700E-0311 8 10 1.600000E-01 2.133300E-0312 10 12 1.600000E-01 2.133300E-0313 11 13 2.000000E-01 4.166700E-03The Joint Coordinatesjoint X Y1 .000000 .0000002 .000000 10.0000003 .000000 20.0000004 10.000000 .0000005 10.000000 10.0000006 10.000000 20.0000007 20.000000 .0000008 20.000000 10.0000009 20.000000 20.00000010 25.000000 10.00000011 30.000000 .00000012 30.000000 10.00000013 30.000000 10.000000The Information of SupportsIS VS11 .00000012 .00000013 .00000041 .00000042 .00000043 .00000071 .00000072 .00000073 .000000111 .000000112 .000000113 .000000( NA= 258 )( NW= 927 )Loading Case 1The Loadings at JointsNLJ= 3ILJ PX PY PM2 150.0000 .0000 .000003 .0000 .0000 -50.00000 10 .0000 .0000 -25.00000The Loadings at MembersNLM= 6ILM ITL PV DST3 2 -250.0000 5.0000004 4 -10.0000 10.0000007 4 -10.0000 10.0000008 2 -200.0000 5.0000009 3 10.0000 10.00000010 3 10.0000 10.000000The Results of CalculationThe Joint Displacementsjoint u v phi1 9.727862E-21 -7.663517E-21 -5.946892E-202 8.890687E-02 -1.049797E-04 -7.120787E-033 1.470285E-01 -2.323802E-04 -7.465712E-034 9.683457E-21 -3.536778E-20 -5.930753E-205 8.886287E-02 -4.844902E-04 -7.160652E-036 1.469822E-01 -7.581843E-04 5.116445E-047 1.058868E-20 -2.196870E-20 -6.233835E-208 8.890696E-02 -3.009411E-04 -6.177452E-039 1.470137E-01 -3.792984E-04 -1.977168E-0310 8.890696E-02 -3.520154E-02 -7.782787E-0311 0.000000E+00 0.000000E+00 0.000000E+0012 8.890696E-02 -7.411547E-02 -7.782787E-0313 0.000000E+00 0.000000E+00 0.000000E+00The Terminal Forcesmember N(st) Q(st) M(st) N(en) Q(en) M(en)1 76.635 97.279 594.689 -76.635 -97.279 378.0972 93.002 -27.030 -129.904 -93.002 27.030 -140.3963 27.030 93.002 90.396 -27.030 156.998 -410.3724 25.691 -16.367 -248.192 -25.691 116.367 -415.4805 353.678 96.835 593.075 -353.678 -96.835 375.2706 199.797 45.396 110.296 -199.797 -45.396 343.6647 -18.366 42.799 66.708 18.366 57.201 -138.7178 -25.747 37.514 -70.087 25.747 162.486 -554.7759 57.201 81.634 177.624 -57.201 18.366 138.71710 219.687 155.887 706.717 -219.687 -55.887 352.15111 .000 .000 25.000 .000 .000 -25.00012 .000 .000 .000 .000 .000 .00013 .000 .000 .000 .000 .000 .000( NA= 258 )( NW= 951 )Press any key to continue程序二:平面三节点有限元程序,如图1所示的悬臂梁,受均布荷载q=1N/mm2 作用。
结构力学实验报告_2
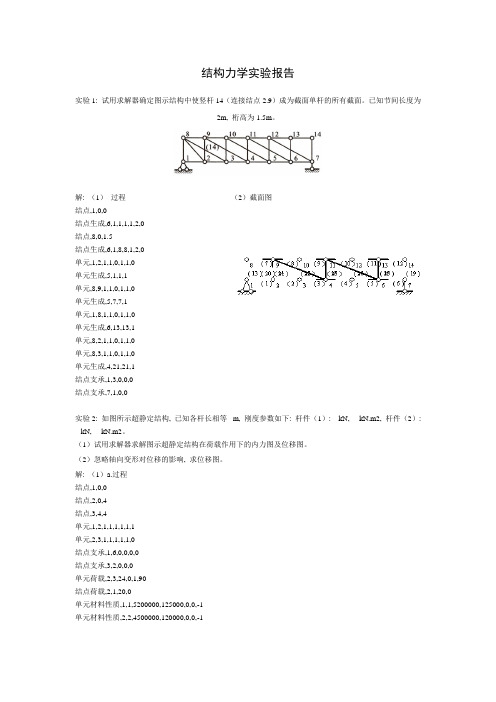
结构力学实验报告实验1: 试用求解器确定图示结构中使竖杆14(连接结点2.9)成为截面单杆的所有截面。
已知节间长度为2m, 桁高为1.5m。
解: (1)过程(2)截面图结点,1,0,0结点生成,6,1,1,1,1,2,0结点,8,0,1.5结点生成,6,1,8,8,1,2,0单元,1,2,1,1,0,1,1,0单元生成,5,1,1,1单元,8,9,1,1,0,1,1,0单元生成,5,7,7,1单元,1,8,1,1,0,1,1,0单元生成,6,13,13,1单元,8,2,1,1,0,1,1,0单元,8,3,1,1,0,1,1,0单元生成,4,21,21,1结点支承,1,3,0,0,0结点支承,7,1,0,0实验2: 如图所示超静定结构, 已知各杆长相等m, 刚度参数如下: 杆件(1): kN, kN.m2, 杆件(2): kN, kN.m2。
(1)试用求解器求解图示超静定结构在荷载作用下的内力图及位移图。
(2)忽略轴向变形对位移的影响, 求位移图。
解: (1)a.过程结点,1,0,0结点,2,0,4结点,3,4,4单元,1,2,1,1,1,1,1,1单元,2,3,1,1,1,1,1,0结点支承,1,6,0,0,0,0结点支承,3,2,0,0,0单元荷载,2,3,24,0,1,90结点荷载,2,1,20,0单元材料性质,1,1,5200000,125000,0,0,-1单元材料性质,2,2,4500000,120000,0,0,-1b.轴力...................c. 剪力图d.弯矩.................. ..位移图yxf.杆端内力值 ( 乘子 = 1)-----------------------------------------------------------------------------------------------杆端 1 杆端 2---------------------------------------- ------------------------------------------ 单元码轴力剪力弯矩轴力剪力弯矩--------------------------------------------------------------------------------------------1 -54.7087063 -9.90729240 12.7943441 -54.7087063 -9.90729240 -26.83482542 -29.9072924 54.7087063 -26.8348254 -29.9072924 -41.2912936 -0.00000000 --------------------------------------------------------------------------------------------g.杆端位移值 ( 乘子 = 1)--------------------------------------------------------------------------------------------杆端 1 杆端 2---------------------------------------- ------------------------------------------ 单元码 u -水平位移 v -竖直位移 -转角 u -水平位移 v -竖直位移 -转角-------------------------------------------------------------------------------------------- 1 0.00000000 0.00000000 0.00000000 0.00002658 -0.00004208 -0.00022465 2 0.00002658 -0.00004208 -0.00022465 0.00000000 0.00000000 0.00039477 --------------------------------------------------------------------------------------------(2)a.过........................... b.位移图结点,1,0,0结点,2,0,4结点,3,4,4单元,1,2,1,1,1,1,1,1单元,2,3,1,1,1,1,1,0结点支承,1,6,0,0,0,0结点支承,3,2,0,0,0单元荷载,2,3,24,0,1,90结点荷载,2,1,20,0单元材料性质,1,1,5200000,125000,0,0,-1单元材料性质,2,2,4500000,120000,0,0,-1单元材料性质,1,1,-1,125000,0,0,-1单元材料性质,2,2,-1,120000,0,0,-1c.杆端位移. .乘..1)-------------------------------------------------------------------------------------------- 杆端 1 杆端 2---------------------------------------- ------------------------------------------ 单元码 u -水平位移 v -竖直位移 -转角 u -水平位移 v -竖直位移 -转角-------------------------------------------------------------------------------------------- 1 0.00000000 0.00000000 0.00000000 0.00000000 -0.00000000 -0.00022326 2 0.00000000 -0.00000000 -0.00022326 0.00000000 0.00000000 0.00037829 -------------------------------------------------------------------------------------------- x。
结构力学程序大作业报告(附程序代码)

结构力学程序大作业报告一.题目要求要求编写连续梁内力计算程序。
二.程序总框图三.程序变量声明NE——单元总数N——节点转角未知量总数BL(NE)——单元杆长数组2EI(NE)——单元抗弯刚度数组,后存单元线刚度P(N)——等效节点荷载数组,后存节点转角KE(N,2)——整体刚度矩阵数组JD(NE,2)——单元定位向量数组FM(NE,2)——单元固端弯矩数组FJ(NE,2)——单元杆端弯矩数组四.程序源代码见附件,或者所附的Matlab文件。
五.程序算例例题一:输入单元总数:6输入单元杆长:[4,6,6,8,4,6]输入单元抗弯刚度:[1,1.5,1,2,1,1.5]输入单元定位向量:[1,2;2,3;3,4;4,5;5,6;6,0]输入单元固端弯矩:[-10.667,10.667;-9,9;-6,6;-21.333,21.333;-3,3;-18,18]单元数: 6单元杆长: 4 6 6 8 4 6单元抗弯刚度: 1.0000 1.5000 1.0000 2.0000 1.0000 1.5000 单元定位向量:1 232 33 44 55 66 0单元固端弯矩:-10.6670 10.6670-9.0000 9.0000-6.0000 6.0000-21.3330 21.3330-3.0000 3.0000-18.0000 18.0000确认输入数据正确(Y/N):Y输入直接节点力矩:[0,0,-8,0,10,0]节点转角未知量总数: 6直接节点力矩: 0 0 -8 0 10 0节点线刚度矩阵: 0.2500 0.2500 0.1667 0.2500 0.2500 0.2500 折算固端弯矩后的节点荷载:10.6670 -1.6670 -11.0000 15.3330 -8.3330 15.0000单元节点位移:11.3842 -1.4345 -8.9803 14.0534 -10.1918 10.0480单元杆端弯矩0 14.9246-14.9246 -0.6976-7.3024 12.3755-12.3755 18.167945-8.1679 7.9520 -7.9520 23.0240做弯矩图:例题一结构弯矩图例题二:计算结果: 输入单元总数:6输入单元杆长:[4,6,6,8,4,6] 输入单元抗弯刚度:[1,1.5,1,2,1,1.5] 输入单元定位向量:[0,1;1,2;2,3;3,4;4,5;5,6]输入单元固端弯矩:[-10.667,10.667;-9,9;-6,6;-21.333,21.333;-3,3;-18,18] 单元数: 67单元杆长: 4 6 6 8 4 6单元抗弯刚度: 1.0000 1.5000 1.0000 2.0000 1.0000 1.5000 单元定位向量:0 11 22 33 44 55 6单元固端弯矩:-10.6670 10.6670-9.0000 9.0000-6.0000 6.0000-21.3330 21.3330-3.0000 3.0000-18.0000 18.0000确认输入数据正确(Y/N):Y输入直接节点力矩:[0,-8,0,10,0,0]节点转角未知量总数: 6直接节点力矩: 0 -8 0 10 0 0节点线刚度矩阵: 0.2500 0.2500 0.1667 0.2500 0.2500 0.2500 折算固端弯矩后的节点荷载:-1.6670 -11.0000 15.3330 -8.3330 15.0000 -18.0000单元节点位移:1.6865 -10.0801 14.8707 -12.1830 17.1951 -26.5976单元杆端弯矩6-9.8237 12.3535-12.3535 -0.2368-7.7632 12.5538-12.5538 16.5854-6.5854 14.1037-14.1037 0弯矩图:例题二结构弯矩图例题三:计算结果:输入单元总数:6输入单元杆长:[4,6,6,8,4,6]输入单元抗弯刚度:[1,1.5,1,2,1,1.5]7输入单元定位向量:[0,1;1,2;2,3;3,4;4,5;5,0]输入单元固端弯矩:[-10.667,10.667;-9,9;-6,6;-21.333,21.333;-3,3;-18,18]单元数: 6单元杆长: 4 6 6 8 4 6单元抗弯刚度: 1.0000 1.5000 1.0000 2.0000 1.0000 1.5000 单元定位向量:0 11 22 33 44 55 0单元固端弯矩:-10.6670 10.6670-9.0000 9.0000-6.0000 6.0000-21.3330 21.3330-3.0000 3.0000-18.0000 18.0000确认输入数据正确(Y/N):Y输入直接节点力矩:[0,-8,0,10,0]节点转角未知量总数: 5直接节点力矩: 0 -8 0 10 0节点线刚度矩阵: 0.2500 0.2500 0.1667 0.2500 0.2500 0.2500 折算固端弯矩后的节点荷载:-1.6670 -11.0000 15.3330 -8.3330 15.00008单元节点位移:1.6537 -9.9489 14.2640 -10.2480 10.0620 单元杆端弯矩-9.8401 12.3207-12.3207 -0.1221-7.8779 12.1930-12.1930 18.2170-8.2170 7.9380-7.9380 23.0310弯矩图:例题三机构弯矩图例题四:计算结果:输入单元总数:69输入单元杆长:[4,6,6,8,4,6]输入单元抗弯刚度:[1,1.5,1,2,1,1.5]输入单元定位向量:[1,2;2,3;3,4;4,5;5,6;6,7]输入单元固端弯矩:[-10.667,10.667;-9,9;-6,6;-21.333,21.333;-3,3;-18,18]单元数: 6单元杆长: 4 6 6 8 4 6单元抗弯刚度: 1.0000 1.5000 1.0000 2.0000 1.0000 1.5000 单元定位向量:1 22 33 44 55 66 7单元固端弯矩:-10.6670 10.6670-9.0000 9.0000-6.0000 6.0000-21.3330 21.3330-3.0000 3.0000-18.0000 18.0000确认输入数据正确(Y/N):Y输入直接节点力矩:[0,0,-8,0,10,0,0]节点转角未知量总数: 7直接节点力矩: 0 0 -8 0 10 0 0节点线刚度矩阵: 0.2500 0.2500 0.1667 0.2500 0.2500 0.250010折算固端弯矩后的节点荷载:10.6670 -1.6670 -11.0000 15.3330 -8.3330 15.0000 -18.0000 单元节点位移:11.3653 -1.3965 -9.1131 14.6603 -12.1263 17.1789 -26.5895 单元杆端弯矩0 14.9531-14.9531 -0.8114-7.1886 12.7358-12.7358 16.5368-6.5368 14.1158-14.1158 0弯矩图:第四题结构弯矩图例题五:(工况情况1 and 工况情况3)11计算结果:输入单元总数:6输入单元杆长:[4,6,6,8,4,6]输入单元抗弯刚度:[1,1.5,1,2,1,1.5]输入单元定位向量:[1,2;2,3;3,4;4,5;5,6;6,7]输入单元固端弯矩:[-10.667,10.667;-9,9;-6,6;-21.333,21.333;-3,3;-18,18]单元数: 6单元杆长: 4 6 6 8 4 6单元抗弯刚度: 1.0000 1.5000 1.0000 2.0000 1.0000 1.5000 单元定位向量:1 22 33 44 55 66 7单元固端弯矩:-10.6670 10.6670-9.0000 9.0000-6.0000 6.0000-21.3330 21.3330-3.0000 3.0000-18.0000 18.0000确认输入数据正确(Y/N):Y输入直接节点力矩:[0,0,0,0,0,0,0]节点转角未知量总数: 712直接节点力矩: 0 0 0 0 0 0 0节点线刚度矩阵: 0.2500 0.2500 0.1667 0.2500 0.2500 0.2500 折算固端弯矩后的节点荷载:10.6670 -1.6670 -3.0000 15.3330 -18.3330 15.0000 -18.0000单元节点位移:12.0951 -2.8562 -4.0044 15.3061 -17.6848 18.7671 -27.3835单元杆端弯矩0 13.8584-13.8584 3.5675-3.5675 14.8693-14.8693 11.3013-11.3013 12.9247-12.9247 0弯矩图:例题六:(荷载工况4)13计算结果:输入单元总数:6输入单元杆长:[4,6,6,8,4,6]输入单元抗弯刚度:[1,1.5,1,2,1,1.5]输入单元定位向量:[0,1;1,2;2,3;3,4;4,5;5,0]输入单元固端弯矩:[-10.667,10.667;0,0;0,0;-21.333,21.333;0,0;-18,18]单元数: 6单元杆长: 4 6 6 8 4 6单元抗弯刚度: 1.0000 1.5000 1.0000 2.0000 1.0000 1.5000 单元定位向量:0 11 22 33 44 55 0单元固端弯矩:-10.6670 10.66700 00 0-21.3330 21.33300 0-18.0000 18.0000确认输入数据正确(Y/N):Y输入直接节点力矩:[0,-8,0,10,0]节点转角未知量总数: 514直接节点力矩: 0 -8 0 10 0节点线刚度矩阵: 0.2500 0.2500 0.1667 0.2500 0.2500 0.2500 折算固端弯矩后的节点荷载:-10.6670 -8.0000 21.3330 -11.3330 18.0000单元节点位移:-3.4807 -7.4113 18.2775 -13.3183 12.3296单元杆端弯矩-12.4073 7.1863-7.1863 -9.15161.1516 9.7146-9.7146 17.1535-7.1535 5.6704-5.6704 24.1648弯矩图:例题六结构弯矩图例题七:(载荷工况2)15计算结果:输入单元总数:6输入单元杆长:[4,6,6,8,4,6]输入单元抗弯刚度:[1,1.5,1,2,1,1.5]输入单元定位向量:[0,1;1,2;2,3;3,4;4,5;5,6]输入单元固端弯矩:[0,0;-9,9;-6,6;0,0;-3,3;0,0]单元数: 6单元杆长: 4 6 6 8 4 6单元抗弯刚度: 1.0000 1.5000 1.0000 2.0000 1.0000 1.5000 单元定位向量:0 11 22 33 44 55 6单元固端弯矩:0 0-9 9-6 60 0-3 316170 0确认输入数据正确(Y/N ):Y输入直接节点力矩:[0,-8,0,10,0,0]节点转角未知量总数: 6直接节点力矩: 0 -8 0 10 0 0节点线刚度矩阵: 0.2500 0.2500 0.1667 0.2500 0.2500 0.2500 折算固端弯矩后的节点荷载: 9 -11 -6 13 -3 0单元节点位移:6.3944 -7.5778 -4.70278.7277 -4.2079 2.1040单元杆端弯矩3.1972 6.3944-6.3944 4.6194-12.6194 0.3389-0.3389 6.37633.6237 3.1559-3.1559 0.0000弯矩图:例题七结构弯矩图例题八:(载荷工况5)计算结果:输入单元总数:6输入单元杆长:[4,6,6,8,4,6]输入单元抗弯刚度:[1,1.5,1,2,1,1.5]输入单元定位向量:[1,2;2,3;3,4;4,5;5,6;6,0]输入单元固端弯矩:[-10.667,10.667;-9,9;-6,6;-21.333,21.333;-3,3;-18,18]单元数: 6单元杆长: 4 6 6 8 4 6单元抗弯刚度: 1.0000 1.5000 1.0000 2.0000 1.0000 1.5000 单元定位向量:1 22 33 44 55 66 0单元固端弯矩:-10.6670 10.6670-9.0000 9.0000-6.0000 6.0000-21.3330 21.3330-3.0000 3.00001819-18.0000 18.0000确认输入数据正确(Y/N ):Y输入直接节点力矩:[0,0,0,0,0,0]节点转角未知量总数: 6直接节点力矩: 0 0 0 0 0 0节点线刚度矩阵:0.2500 0.2500 0.1667 0.2500 0.2500 0.2500折算固端弯矩后的节点荷载:10.6670 -1.6670 -3.0000 15.3330 -18.3330 15.0000单元节点位移:12.1146 -2.8952 -3.8676 14.6811 -15.6926 11.4231单元杆端弯矩0 13.8291-13.8291 3.6847-3.6847 14.4982-14.4982 12.9810-12.9810 6.5769-6.5769 23.7116弯矩图:例题八结构弯矩图附件:程序源代码disp('输入单元总数:'); % NE表示单元总数,为1*n矩阵(设NE=n)NE=input('');disp('输入单元杆长:'); % BL表示单元杆长矩阵,为1*n矩阵BL=input('');disp('输入单元抗弯刚度:'); % EI表示单元抗弯刚度矩阵,为n*2矩阵EI=input('');disp('输入单元定位向量:'); % JD表示单元定位向量,为n*2矩阵JD=input('');disp('输入单元固端弯矩:'); % FM表示单元固端弯矩,为n*2矩阵FM=input('');disp('单元数:');disp(NE);disp('单元杆长:');disp(BL);disp('单元抗弯刚度:');disp(EI);disp('单元定位向量:');disp(JD);disp('单元固端弯矩:');disp(FM);disp('确认输入数据正确(Y/N):'); % 确认所输入数据是否有误A1=input('','s');if A1=='N'disp('请重启程序,重新输入');pause(2);close;endN=JD(NE,1); % 确定N的维数if JD(NE,2)~=0N=JD(NE,2);Enddisp('输入直接节点力矩:')P=input(''); % P表示节点载荷,为1*N阶矩阵(N为未知变量数,n为单元数,有N≤n)20disp('节点转角未知量总数:');disp(N);disp('直接节点力矩:');disp(P);for I=1:NE % 得到单元线刚度矩阵EI EI(I)=EI(I)/BL(I);enddisp('节点线刚度矩阵:');disp(EI);for I=1:NE % 将固端弯矩折算到节点载荷中I1=JD(I,1);I2=JD(I,2);if I1~=0P(I1)=P(I1)-FM(I,1);endif I2~=0P(I2)=P(I2)-FM(I,2);endenddisp('折算固端弯矩后的节点荷载:');disp(P);for I=1:N % 在形成整体刚度矩阵前,将其初值赋为0 for J=1:2KE(I,J)=0.0;endendfor I=1:NE % 求解整体刚度矩阵,为n*2阶矩阵I1=JD(I,1);I2=JD(I,2);if I1~=0KE(I1,1)=KE(I1,1)+4*EI(I);if I2~=0KE(I1,2)=2*EI(I);endendif I2~=0KE(I2,1)=KE(I2,1)+4*EI(I);end21endfor I=1:N-1 % 高斯消元的过程C=KE(I,2)/KE(I,1);KE(I+1,1)=KE(I+1,1)-C*KE(I,2);P(I+1)=P(I+1)-C*P(I);endP(N)=P(N)/KE(N,1);for I=N-1:-1:1P(I)=P(I)-KE(I,2)*P(I+1);P(I)=P(I)/KE(I,1);Enddisp('单元节点位移:');disp(P); % 输出计算得出的节点位移for I=1:NE % 计算杆端弯矩I1=JD(I,1);I2=JD(I,2);DZ(1)=0;DZ(2)=0;if I1~=0DZ(1)=P(I1);endif I2~=0DZ(2)=P(I2);endFJ(I,1)=4*EI(I)*DZ(1)+2*EI(I)*DZ(2)+FM(I,1); FJ(I,2)=2*EI(I)*DZ(1)+4*EI(I)*DZ(2)+FM(I,2); enddisp('单元杆端弯矩');disp(FJ);22。
结构力学实验报告15篇

结构力学实验报告15篇第一篇:结构力学实验报告1结构力学实验报告结构力学实验报告班级 12土木2班姓名学号结构力学实验报告实验报告一实验名称在求解器中输入平面结构体系一实验目的1、了解如何在求解器中输入结构体系2、学习并掌握计算模型的交互式输入方法;3、建立任意体系的计算模型并做几何组成分析;4、计算平面静定结构的内力。
二实验仪器计算机,软件:结构力学求解器三实验步骤图2-4-3 是刚结点的连接示例,其中图2-4-3a 中定义了一个虚拟刚结点和杆端的连接码;各个杆端与虚拟刚结点连接后成为图2-4-3b 的形式,去除虚拟刚结点后的效果为图2-4-3c 所示的刚结点;求解器中显示的是最后的图2-4-3c。
图2-4-4 是组合结点的连接示例,同理,无需重复。
铰结点是最常见的结点之一,其连接示例在图2-4-5 中给出。
这里,共有四种连接方式,都等效于图2-4-5e 中的铰结点,通常采用图2-4-5a 所示方式即可。
值得一提的是,如果将三个杆件固定住,图2-4-5b~d 中的虚拟刚结点也随之被固定不动,而图2-4-5a 中的虚拟刚结点仍然存在一个转动自由度,可以绕结点自由转动。
这是一种结点转动机构,在求解器中会自动将其排除不计①。
结点机构实际上也潜存于经典的结构力学之中,如将一个集中力矩加在铰结点上,便可以理解为加在了结点机构上(犹如加在可自由转动的销钉上),是无意义的。
综上所述,求解器中单元对话框中的“连接方式”是指各杆端与虚拟刚结点的连接方式,而不是杆件之间的连接方式。
这样,各杆件通过虚拟刚结点这一中介再和其他杆件间接地连接。
这种处理的好处是可以避免结点的重复编码(如本书中矩阵位移法中所介绍的),同时可以方便地构造各种结构力学实验报告复杂的组合结点。
另外,在定义位移约束时,结点处的支座约束也是首先加在虚拟刚结点上,再通过虚拟刚结点施加给其他相关的杆端。
N,1,0,0 解输入后的结构如图2-4-6b所示,N,2,0,1 命令数据文档如下,其中左边和右N,3,1,1 边分别为中、英文关键词命令数据N,4,1,0 文档。
结构力学课程设计报告

一. 课程设计的目的1. 通过实验及数据分析熟练掌握结构力学求解器的使用方法,了解求解器的主要功能,了解数据输入和输出的基本操作过程,主要参数的意义和编辑方法。
2. 通过实践进一步了解结构在广义荷载作用下内力和位移的分布状态和变化规律,从而指导我们探索和发现更合理的结构形式,为将来的学习和科研工作打下坚实的基础二. 课程设计的内容(1).对图示两类桁架进行分析在相同荷载作用下,比较各类桁架的受力特点;讨论各种杆件(上弦杆,下弦杆,竖杆,斜杆)内力随随高跨比变化的规律;若增加杆件使其成为超静定桁架,内力有何变化。
(2).两种结构在静力等效荷载作用下,内力有哪些不同?1/11/(3)、用求解器自动求解功能求a=2和a=1.0时的各杆内力。
比较两种情况内力分布,试用试算法调整a 的大小,确定使弯矩变号的临界点a 0,当a=a 0时结构是否处于无弯矩状态?(4),E =1.5*106kPa ,截面0.5*0.6m2,线膨胀系数1.0*10-5)。
第一跨底部温度升高60ºC ,分析变形和内力图的特点。
(4)、计算下支撑式五角形组合屋架的内力,并分析随跨高 比变化内力变化规律。
当高度确定后内力随f 1,f 2的比例不同的变化规律(四个以上算例)。
一. 课程设计的数据1/4 11×(1/2) 1/4f 2f 1 f =1.2mq =1kN/m a1.第(1)题数据1)平行弦桁架a)高跨比1:4(每小格比例2:3)输出图形:输出内力值:内力计算杆端内力值 ( 乘子 = 1)-----------------------------------------------------------------------------------------------杆端 1 杆端 2----------------------------------------------------------------------------------单元码轴力剪力弯矩轴力剪力弯矩-----------------------------------------------------------------------------------------------1 -0.00000000 0.00000000 0.00000000 -0.00000000 0.00000000 0.000000002 1.66666667 0.00000000 0.00000000 1.66666667 0.00000000 0.000000003 2.66666667 0.00000000 0.00000000 2.66666667 0.00000000 0.000000004 2.66666667 0.00000000 0.00000000 2.66666667 0.00000000 0.000000005 1.66666667 0.00000000 0.00000000 1.66666667 0.00000000 0.000000006 0.00000000 0.00000000 0.00000000 0.00000000 0.00000000 0.000000007 -1.66666667 0.00000000 0.00000000 -1.66666667 0.00000000 0.000000008 -2.66666667 0.00000000 0.00000000 -2.66666667 0.00000000 0.000000009 -3.00000000 0.00000000 0.00000000 -3.00000000 0.00000000 0.0000000010 -3.00000000 0.00000000 0.00000000 -3.00000000 0.00000000 0.0000000011 -2.66666667 0.00000000 0.00000000 -2.66666667 0.00000000 0.0000000012 -1.66666667 0.00000000 0.00000000 -1.66666667 0.00000000 0.0000000013 -3.00000000 0.00000000 0.00000000 -3.00000000 0.00000000 0.0000000014 -2.50000000 0.00000000 0.00000000 -2.50000000 0.00000000 0.0000000015 -1.50000000 0.00000000 0.00000000 -1.50000000 0.00000000 0.0000000016 -1.00000000 0.00000000 0.00000000 -1.00000000 0.00000000 0.0000000017 -1.50000000 0.00000000 0.00000000 -1.50000000 0.00000000 0.0000000018 -2.50000000 0.00000000 0.00000000 -2.50000000 0.00000000 0.0000000019 -3.00000000 0.00000000 0.00000000 -3.00000000 0.00000000 0.0000000020 3.00462606 0.00000000 0.00000000 3.00462606 0.00000000 0.0000000021 1.80277564 0.00000000 0.00000000 1.80277564 0.00000000 0.0000000022 0.60092521 0.00000000 0.00000000 0.60092521 0.00000000 0.0000000023 0.60092521 0.00000000 0.00000000 0.60092521 0.00000000 0.0000000024 1.80277564 0.00000000 0.00000000 1.80277564 0.00000000 0.0000000025 3.00462606 0.00000000 0.00000000 3.00462606 0.00000000 0.00000000 -----------------------------------------------------------------------------------------------b)高跨比1:6 (每小格比1:1)输出图形:输出内力值:内力计算杆端内力值 ( 乘子 = 1)-----------------------------------------------------------------------------------------------杆端 1 杆端 2----------------------------------------------------------------------------------单元码轴力剪力弯矩轴力剪力弯矩-----------------------------------------------------------------------------------------------1 -0.00000000 0.00000000 0.00000000 -0.00000000 0.00000000 0.000000002 2.50000000 0.00000000 0.00000000 2.50000000 0.00000000 0.000000003 4.00000000 0.00000000 0.00000000 4.00000000 0.00000000 0.000000004 4.00000000 0.00000000 0.00000000 4.00000000 0.00000000 0.000000005 2.50000000 0.00000000 0.00000000 2.50000000 0.00000000 0.000000006 0.00000000 0.00000000 0.00000000 0.00000000 0.00000000 0.000000007 -2.50000000 0.00000000 0.00000000 -2.50000000 0.00000000 0.000000008 -4.00000000 0.00000000 0.00000000 -4.00000000 0.00000000 0.000000009 -4.50000000 0.00000000 0.00000000 -4.50000000 0.00000000 0.0000000010 -4.50000000 0.00000000 0.00000000 -4.50000000 0.00000000 0.0000000011 -4.00000000 0.00000000 0.00000000 -4.00000000 0.00000000 0.0000000012 -2.50000000 0.00000000 0.00000000 -2.50000000 0.00000000 0.0000000013 -3.00000000 0.00000000 0.00000000 -3.00000000 0.00000000 0.0000000014 -2.50000000 0.00000000 0.00000000 -2.50000000 0.00000000 0.0000000015 -1.50000000 0.00000000 0.00000000 -1.50000000 0.00000000 0.0000000016 -1.00000000 0.00000000 0.00000000 -1.00000000 0.00000000 0.0000000017 -1.50000000 0.00000000 0.00000000 -1.50000000 0.00000000 0.0000000018 -2.50000000 0.00000000 0.00000000 -2.50000000 0.00000000 0.0000000019 -3.00000000 0.00000000 0.00000000 -3.00000000 0.00000000 0.0000000020 3.53553391 0.00000000 0.00000000 3.53553391 0.00000000 0.0000000021 2.12132034 0.00000000 0.00000000 2.12132034 0.00000000 0.0000000022 0.70710678 0.00000000 0.00000000 0.70710678 0.00000000 0.0000000023 0.70710678 0.00000000 0.00000000 0.70710678 0.00000000 0.0000000024 2.12132034 0.00000000 0.00000000 2.12132034 0.00000000 0.0000000025 3.53553391 0.00000000 0.00000000 3.53553391 0.00000000 0.00000000 -----------------------------------------------------------------------------------------------C)高跨比1:9(每小格比2:3)输出图形:输出内力值:内力计算杆端内力值 ( 乘子 = 1)-----------------------------------------------------------------------------------------------杆端 1 杆端 2----------------------------------------------------------------------------------单元码轴力剪力弯矩轴力剪力弯矩-----------------------------------------------------------------------------------------------1 0.00000000 0.00000000 0.00000000 0.00000000 0.00000000 0.000000002 3.75000000 0.00000000 0.00000000 3.75000000 0.00000000 0.000000003 6.00000000 0.00000000 0.00000000 6.00000000 0.00000000 0.000000004 6.00000000 0.00000000 0.00000000 6.00000000 0.00000000 0.000000005 3.75000000 0.00000000 0.00000000 3.75000000 0.00000000 0.000000006 0.00000000 0.00000000 0.00000000 0.00000000 0.00000000 0.000000007 -3.75000000 0.00000000 0.00000000 -3.75000000 0.00000000 0.000000008 -6.00000000 0.00000000 0.00000000 -6.00000000 0.00000000 0.000000009 -6.75000000 0.00000000 0.00000000 -6.75000000 0.00000000 0.0000000010 -6.75000000 0.00000000 0.00000000 -6.75000000 0.00000000 0.0000000011 -6.00000000 0.00000000 0.00000000 -6.00000000 0.00000000 0.0000000012 -3.75000000 0.00000000 0.00000000 -3.75000000 0.00000000 0.0000000013 -3.00000000 0.00000000 0.00000000 -3.00000000 0.00000000 0.0000000014 -2.50000000 0.00000000 0.00000000 -2.50000000 0.00000000 0.0000000015 -1.50000000 0.00000000 0.00000000 -1.50000000 0.00000000 0.0000000016 -1.00000000 0.00000000 0.00000000 -1.00000000 0.00000000 0.0000000017 -1.50000000 0.00000000 0.00000000 -1.50000000 0.00000000 0.0000000018 -2.50000000 0.00000000 0.00000000 -2.50000000 0.00000000 0.0000000019 -3.00000000 0.00000000 0.00000000 -3.00000000 0.00000000 0.0000000021 2.70416346 0.00000000 0.00000000 2.70416346 0.00000000 0.0000000022 0.90138782 0.00000000 0.00000000 0.90138782 0.00000000 0.0000000023 0.90138782 0.00000000 0.00000000 0.90138782 0.00000000 0.0000000024 2.70416346 0.00000000 0.00000000 2.70416346 0.00000000 0.00000000 -------------------------------------------------------------------------------------------- 讨论分析:由以上三种高跨比的内力比较发现,上弦杆内力随着高跨比的增大,内力逐渐增大。
结构力学矩阵位移法实践报告

结构力学上机实验报告姓名:学号:指导老师:专业班级:日期:矩阵位移法上机实践报告一、实践目的学会使用矩阵位移法,掌握PF 程序的使用并用来计算给定的平面刚架、桁架和连续粱的内力。
二、实践要求(1)用PF 程序计算给定的平面钢架、桁架和连续粱的内力;(2)绘制给出上述结构的内力图。
三、实践步骤(1)编号:对杆件和结点编号,选定局部坐标系和整体坐标系。
(2)建立输入文件:根据题目已给数据,建立格式为.txt 的输入数据文件,存放在与PF 程序相当的文件夹下。
(3)运行计算:运行程序,分别按照要求键入输入数据的文本名和输出存储数据的文件名从而得到相应的输出文件。
(4)绘图:根据得到的结果,画出内力图。
四、每题的题目及具体解题步骤如下所示:1.作图示刚架的N F 、S F 、M 图,已知各杆截面均为矩形,柱截面宽0.4m,高0.4m, 大跨梁截面宽0.35m,高0.85m ,小跨梁截面宽0.35m,高0.6m ,各杆E=3.0×104 MPa。
解:(1)编号根据刚架进行编号。
注意到作用在杆上的集中力偶由于PF程序未直接处理的算法,故在此点增加一个绞结点11。
(2)建立输入文件timu1.txt,存于PF同一文件夹内。
具体输入如下:************************************************* ** EX.1 A Simple Suppoted Frame 2013.06.08 ** *************************************************3E7 16 13 9 11 2 16E-2 213E-52 4 2975E-4 179E-43 4 16E-2 213E-54 6 21E-2 63E-45 6 16E-2 213E-52 7 16E-2 213E-57 8 2975E-4 179E-44 8 16E-2 213E-58 9 21E-2 63E-46 9 16E-2 213E-57 10 16E-2 213E-510 11 2975E-4 179E-411 12 2975E-4 179E-48 12 16E-2 213E-5 12 13 21E-2 63E-4 9 13 16E-2 213E-5 0 00 4.57.6 07.6 4.511.4 011.4 4.50 7.77.6 7.711.4 7.70 10.93.8 10.97.6 10.911.4 10.911 012 013 031 032 033 051 052 053 047 100 0 010 100 0 011 0 0 -1512 0 0 -1571 3 20 4.52 2 -26 3.82 4 -36 7.64 4 -36 3.84 2 -26 2.77 4 -36 7.69 4 -36 3.8(3)运行PF程序,得到如下的timu1out.txt输出文件:Input Data File Name: timu1.txtOutput File Name: timu1out.txt************************************************* ** EX.1 A Simple Suppoted Frame 2013.06.08 ** *************************************************The Input DataThe General InformationE NM NJ NS NLC3.000E+07 16 13 9 1The Information of Membersmember start end A I1 12 1.600000E-01 2.130000E-032 2 4 2.975000E-01 1.790000E-023 34 1.600000E-01 2.130000E-034 4 6 2.100000E-01 6.300000E-035 56 1.600000E-01 2.130000E-036 27 1.600000E-01 2.130000E-037 7 8 2.975000E-01 1.790000E-028 4 8 1.600000E-01 2.130000E-039 8 9 2.100000E-01 6.300000E-0310 6 9 1.600000E-01 2.130000E-0311 7 10 1.600000E-01 2.130000E-0312 10 11 2.975000E-01 1.790000E-0213 11 12 2.975000E-01 1.790000E-0214 8 12 1.600000E-01 2.130000E-0315 12 13 2.100000E-01 6.300000E-0316 9 13 1.600000E-01 2.130000E-03The Joint Coordinatesjoint X Y1 .000000 .0000002 .000000 4.5000003 7.600000 .0000004 7.600000 4.5000005 11.400000 .0000006 11.400000 4.5000007 .000000 7.7000008 7.600000 7.7000009 11.400000 7.70000010 .000000 10.90000011 3.800000 10.90000012 7.600000 10.90000013 11.400000 10.900000The Information of SupportsIS VS11 .00000012 .00000013 .00000031 .00000032 .00000033 .00000051 .00000052 .00000053 .000000Loading Case 1The Loadings at JointsNLJ= 4joint FX FY FM7 100.000000 .000000 .00000010 100.000000 .000000 .00000011 .000000 .000000 -15.00000012 .000000 .000000 -15.000000The Loadings at MembersNLM= 7member type VF DST1 3 20.000000 4.5000002 2 -26.000000 3.8000002 4 -36.000000 7.6000004 4 -36.000000 3.8000004 2 -26.000000 2.7000007 4 -36.000000 7.6000009 4 -36.000000 3.800000The Results of CalculationThe Joint Displacementsjoint u v rotation1 7.105461E-21 -1.638202E-20 -1.781187E-202 1.133506E-02 -1.535815E-04 -1.284918E-033 9.610091E-21 -4.106481E-20 -2.156737E-204 1.133276E-02 -3.849826E-04 3.897026E-055 7.784447E-21 -2.983317E-20 -1.882111E-206 1.132041E-02 -2.796859E-04 -9.197894E-047 1.610528E-02 -2.069985E-04 -9.285745E-048 1.603101E-02 -5.147110E-04 6.617797E-059 1.601517E-02 -3.701405E-04 -4.822142E-0410 1.847558E-02 -1.982752E-04 -1.263834E-0411 1.843980E-02 -3.424985E-04 -8.166131E-0612 1.840402E-02 -5.043449E-04 -1.356586E-0413 1.838526E-02 -3.892299E-04 -1.683735E-04The Terminal Forcesmember FN FS M1 start 1 163.820232 116.054614 211.868721end 2 -163.820232 -26.054614 107.8770412 start 2 2.696605 83.694719 -146.763245end 4 -2.696605 215.905278 -355.636874 3 start 3 410.648087 96.100915 215.673680end 4 -410.648087 -96.100915 216.780436 4 start 4 20.475884 .150115 -42.808557end 6 -20.475884 162.649883 -245.140956 5 start 5 298.331671 77.844472 188.211070end 6 -298.331671 -77.844472 162.089052 6 start 2 80.125514 28.751219 38.886205end 7 -80.125514 -28.751219 53.117689 7 start 7 87.216625 93.210427 -62.647484end 8 -87.216625 180.389569 -268.633252 8 start 4 194.592693 113.880194 181.664996end 8 -194.592693 -113.880194 182.751603 9 start 8 26.265385 29.752419 -2.835098end 9 -26.265385 107.047579 -144.025679 10 start 6 135.681788 57.368587 83.051904end 9 -135.681788 -57.368587 100.527564 11 start 7 -13.084913 15.967843 9.529794end 10 13.084913 -15.967843 41.567301 12 start 10 84.032157 -13.084913 -41.567301end 11 -84.032157 13.084913 -8.155369 13 start 11 84.032157 -13.084913 -6.844631end 12 -84.032157 13.084913 -42.87804014 start 8 -15.549295 52.928954 88.716747end 12 15.549295 -52.928954 80.65589715 start 12 31.103202 -28.634209 -52.777857end 13 -31.103202 28.634209 -56.03212716 start 9 28.634209 31.103202 43.498115end 13 -28.634209 -31.103202 56.032127 (4)根据得到的数据,绘制内力图如下:F N图:Fs图:M图:2、计算图示桁架各杆的轴力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Central South University
Changsha, 410083
P.R.China
Tel: ***
E-mail: ***
P O S I T I O N S O U G H T
E D U C A T I O N
◆Sep 2010 to present
Central South University, Changsha City
Candidate for Bachelor of Biomedical Engineering; major in Electronic Informatics of Bio-medical Engineering; minor in Japanese; Intensive Training Program of High-Tech Innovation and entrepreneuring for undergraduates
Specialized courses included Design of Electronic System, Digital Signal/Image Processing, Communication & Networks, Fundamentals of Sensors & Testing Technology, Engineering Physiology, Application & Design of Medical Instrumentation P E R S O N A L I T Y
◆Quick learner/Cooperative/Efficient/Responsible/Friendly/Ability to do multiple tasks
S K I L L S
◆Language
Native speaker of Chinese; Fluent in English; Japanese as working language
◆Computer
Can operate Microsoft Windows, DOS; Proficient in Microsoft Office (Word, Excel, Powerpoint, etc), Flash; Familiar with C, Visual Basic
◆Electronic Engineering
Proficient in EDA(Electronic Design Automatic), such as Protel; Familiar with PSPICE, ISP Synario, Labview, Analog Circuit & Digital Circuit Design
C E R T I F I C A T E S
◆College English Test Band 6
◆Japanese-Language Proficiency Test, Level 2, Dec 2011
A W A R D S
◆Sep 2014 1st grade award of The 9th Undergraduate Electronic Design
Contest of Central South University
◆2013 to 2014 BaoGang Scholarship
◆2012 to 2013 First-class excellent academic scholarship & all-round excellent student ◆2011 to 2012 Shenhua Scholarship
First-class excellent academic scholarship & all-round excellent student
◆2010 to 2011 First-class excellent academic scholarship & all-round excellent student
E X P E R I E N C E
◆Technical Experience
Aug 2010 to present
Enter the Biosensor National Special Lab
Jul 2011
Short-term practice, Visit affiliated hospital of Central South University Medical College, Comprehend the organization of medical system, Obtain some simple experience of operating & servicing the medical instruments
Aug 2012 to May 2013
Participate in SRTP(Students Research Training Program), Complete the project of “designing and producing courseware in Modern Biosensors & Tes t ing Technology ”, in charge of main chapters
◆Social Experience
2010 to present Commissary in charge of study in class
2010 to present Participate in Japanese Club, in charge of external affairs: Organize Japanese Corner every week, Communicate with foreign students and invite them to join in the club for learning mutual language and culture, Enroll new members into the club
2011 to 2013 Participate in Practice Club of college, Issue journals regularly, Improve relationship between senior/junior students and freshman/sophomore, Organize visiting to enterprises
P E R S O N A L D A T A
Birth: Dec 5th,1989 Gender: male Health: Excellent Place of Birth: Shenyang City, Liaoning Province
Interest: Enjoy setting-up exercise, badminton & traveling
E N C L O S U R E S: Copies of certificates & awards。