航空摄影测量中英文对照外文翻译文献
航空摄影测量的应用

航空摄影测量的应用摘要:航空摄影测量在资源调查、土地利用、城市规划、国土普查、荒漠化监测、等方面起着极其重要作用。
文章阐述航空摄影测量的发展、并结合实际举例阐述其产品在国民经济中的应用。
关键词:航空摄影测量,国民经济,应用abstract:aerophotogrammetry plays an important role in resource investigation, land use, urban planning, territory general investigation and desertification supervision, etc. this paper illustrates the development of aerophotogrammetry, taking an practical use of aerophotogrammetry to state the application of aerophotogrammetry in national economic construction.key words: aerophotogrammetry, national economics, applicatio中图分类号:d993.4文献标识码:a 文章编号:1、前言航空摄影测量指从空中由飞机、卫星等航空器拍摄获得的像片。
为使取得的航空像片能用于航空测量——在专门的仪器上建立立体模型进行量测,摄影时飞机应按设计的航线往返平行飞行进行拍摄,以取得具有一定重叠度的航空像片。
再利用摄影测量学原理及立体测图仪,将像片组成立体模型,以从事各种地图测绘及地物判读工作。
航空摄影测量是量测地物空间关系,如:坐标、高程、距离等,最后可得地形图、平面图、影像图以及三维地面模型。
航空摄影测量一直是我国基本地图成图的主要方式,由于其制图速度快,精度高且均匀,是我们今后数字制图的一个重要发展方向。
全球定位系统 毕业论文外文文献翻译
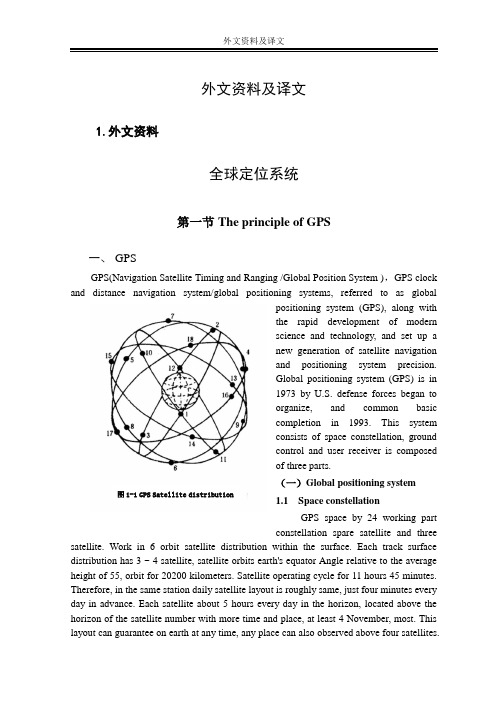
外文资料及译文1.外文资料全球定位系统第一节The principle of GPS一、GPSGPS(Navigation Satellite Timing and Ranging /Global Position System ),GPS clock and distance navigation system/global positioning systems, referred to as globalpositioning system (GPS), along withthe rapid development of modernscience and technology, and set up anew generation of satellite navigationand positioning system precision.Global positioning system (GPS) is in1973 by U.S. defense forces began toorganize, and common basiccompletion in 1993. This systemconsists of space constellation, groundcontrol and user receiver is composedof three parts.(一)Global positioning system 图1-1 GPS Satellite distribution1.1 Space constellationGPS space by 24 working partconstellation spare satellite and three satellite. Work in 6 orbit satellite distribution within the surface. Each track surface distribution has 3 ~ 4 satellite, satellite orbits earth's equator Angle relative to the average height of 55, orbit for 20200 kilometers. Satellite operating cycle for 11 hours 45 minutes. Therefore, in the same station daily satellite layout is roughly same, just four minutes every day in advance. Each satellite about 5 hours every day in the horizon, located above the horizon of the satellite number with more time and place, at least 4 November, most. This layout can guarantee on earth at any time, any place can also observed above four satellites.Satellite signal transmission and reception and the influence, so the GPS is a global, all-weather real-time navigation and positioning for system. After the completion of the global positioning system, its work in the space distribution of satellite 1-1 as shown. GPS satellite zips are installed on the light, microprocessors, message signal emission equipment, storage, and provide power supply by solar cells have little fuel, satellite is used to regulate the satellite orbit and posture, and in the monitor of instruction, start spare satellite.1.2 The ground monitoring systemGPS ground monitoring system in the world by five sites. One master station, 3 injection station. Five monitor are equipped with automatic acquisition, data center, double-frequency GPS receiver, precision clock, environmental data sensors and computing devices, and to master station provides all kinds of observation data. Master station (in Colorado) for system management and data processing center, its main content is the use of this site and other monitor the observation data of the satellite's star calendar calculation and satellite clock and atmospheric delay correction parameter, provide global positioning system, and the time base station, these parameters to adjust sidetracked into orbit, the satellite to enable spare satellite instead of failure satellite, etc. Injection station master station will be calculated and satellite star calendar, clock, satellite navigation message and other control commands into corresponding satellite etc, and storage system into the correctness of monitoring information. Besides, the master station, GPS ground monitoring system, various unattended highly automated and standardized work.1.3 User equipment partsUser equipment including GPS receiver host, antenna, power and data processing software component. The host for the microcomputer, quartz oscillators core, and the corresponding input and output interface, and equipment. In the special software under control, the host for homework, satellite data acquisition, processing and storage of the equipment, the system state inspection, alarm and maintenance, the receiving system of automatic management. Antenna, often used for collecting all from each azimuth, arbitrary nonnegative Angle of satellite signal. Due to the satellite antenna pedestal weak signal in a pre-amplifier, amplification, reoccupy coaxial cable input host. Power supply for host and aerial part, can use through rectifier voltage, the mains, also can use the accumulator.(二)Global positioning system (GPS) signalsGPS satellite launch a coherent wave, the wavelength 1L and frequency respectively 2L :f MHZ,cm f MHZ,cm L L L L 11221575421912276024====..λλ1L and 2L as a carrier with two modulation signal, a kind of navigation signal, another kind is message signal. Navigation signal S Mb 023.1 is divided again, frequency m A C 293=λ for code rate for the coarse yards (C/A code) and the rate SMb 023.1for the essence, the frequency of m p 3.291=λcode (P). Thick yards (C/A code) repeat each signal encoding, can quickly capture signal, according to the design for rough positioning, Pure code (P) yards signal encoding every seven, and repeat each satellite, structure is very complex, not capture, but can be used for accurate positioning. Message signal while the rate s bit 50to the carrier 1L and 2L modulation in, including satellite, the correct star calendar and satellite working state. Through the message signal receiver can choose the best one group of graphics, positioning signals observation data processing..第二节 GPS Positioning method一、 GPS Positioning method classification(一)、 The static and dynamic positioningBy means of static GPS positioning and can be divided into dynamic positioning.1、Static positioningIf you stay in the surrounding relatively fixed protection can not perceive motion, or movement is so slowly that require months or years, namely that can be reflected in the earth for fixed-point relative coordinates is fixed, the determination method for the coordinates of static positioning is called. In the mathematics model of the static localization, the position is constant. Due to the rapid solutions of GPS "unknown" technology of the cycle time of operation, static already shortened to a few minutes, so, in addition to the original geodetic measurement and monitoring of the force applied, rapid static orientation has been widely applied to the common measurement and engineering measurement.2、 Dynamic positioningCars, ships, aircraft and aircraft in motion, people often need to know their real-time position. In these sports carrier mounted on GPS receiver, real-time GPS signals measured antenna location, called the GPS kinematic positioning. If the only measure the real-time position, the carrier of sports also determine the speed, time and location, etc, thus guidingstatus parameters to reserve the object orientation, called the navigation movement. GPS navigation is virtually dynamic positioning.(二)、Absolute positioning and relative locationAccording to determine the GPS receiver in earth coordinate system in different position, can be divided into a single absolute positioning and the relative positioning, such as machine, 2-1.1、Absolute positioning图2-1 Absolute and relative positioningTo determine the absolute positioning is independent coordinate system in the position of the dot. Because single absolute positioning error by satellite reception when the effect, low precision. Mainly used for low precision dynamic positioning, such as ships, aircraft navigation of mineral resources, geological investigation, Marine fishing and determine the relative position of the initial value.2、Relative positioningRelative location is determined simultaneous tracking same GPS signals of several sets of the relative position between the receiver is a kind of method. Since the synchronous observation, the synchronization of many error signal obtained station is identical or similar (such as satellite clock error, error, the signal of the star alex atmospheric transmission error, etc.), can avoid or weaken these errors, obtain high relative position. Relative positioning, signal processing and data than absolute orientation is complex, relative positioning is the synchronization between baseline vector (station), and 3d coordinate need at least a spot for known to the rest of the each point coordinates. The static and dynamic positioning can position by relative positioning, such as earthdeformation measurement, ground control aerial photogrammetry, etc.In the dynamic positioning, often USES "difference", a GPS receiver will be placed on the base coordinate, known as the receiver in sports, all receivers carrier, according to the known synchronous control results, the positioning correct number starting position, in order to improve the real-time to positioning accuracy. This is based on a single point positioning and relative location of positioning mode.(三)、 Pseudorange method and the carrier phase methodGPS satellite positioning, according to the different signal processing, can divide again pseudorange method and the carrier phase method.1、Pseudorange methodThe positioning principle is simple. When positioning, receiver and the oscillation ofA satellite signal the same group (P yards range yards or C/A code), through delay and receiver receive signals, when two groups compared each other completely coincide (related to signal measured signals, namely for the delay in quantity, satellite signal transmission time with A series of modified times the speed of light, satellites and draw the oblique distance antenna phase center. If the four (or above), i.e. the distance can satellite stations calculate intersection method of location and clock error four unknown. Due to the wavelength m p 3.29λrange yards m A C 293=λ. To one percent of the estimated $yards range resolution, length of to 0.3 meters (P) and 3 meters (C/A code) the ranging accuracy. Therefore, the pseudorange accuracy is relatively low.2、The carrier phase methodThe carrier is a measure of carrier signal, measurements, determine the satellite signal and reference signal receiver, calculate the phase difference observation. Then the same principle and pseudorange method, the position of the station clock error, etc. The wavelength modulated symbol cm L 191=λ,cm L 242=λ, than much shorter wavelength of one percent, to $yards range resolution, estimating length reached 1.9 cm (P) and 2.4 L centimeters (C/A code) the ranging accuracy. In the measurement and precision air triangle measuring, high precision, often USES relative positioning method, the carrier phase to eliminate system error.The carrier phase method for measuring the complete phase observation data ϕfrom several parts:ϕϕϕϕφφ=-=+=++S R R N N I n tF 00~()() (2-1)Type: s ϕfor the first phase, the observational S,R ϕ for the position of the receiverobservation R phase, ~ϕfor the actual phase observations,0N for the whole cycle count,also called the whole cycle unknown, ()φInt for the actual observation time t the integer part, first observed 0t for the duration of zero, every moment, observation 0t by continuous accumulated through counter counts, called after the cycle count, ()φR F for the actual observation in the integer part, with high precision measurement.二、GPS positioning operation modeMainly includes GPS real-time GPS navigation positioning, afterwards (with) the dynamic positioning and used to measure the static or dynamic) relative orientation accurate.1 . GPS kinematic positioningGPS real-time navigation) is required (and observation data in the positioning of the moment, its main purpose is to navigation. AS mentioned above, the absolute positioning (single point positioning) by the us government's "SA" (choose usability) and "AS" (the electronic technology, the influence of deception by civil service standard of GPS level position precision of 100 meters. So many users using differential GPS system (CDGPS and WADGPS) to improve the precision. CDGPS pseudorange method and the users of the station standing range within 100 miles, precision for 5 ~ 10 meters. The carrier phase method CDGPS (also called RTK) standing and users in the station within range, 30 kilometers, the accuracy of cm. And WADGPS big scope is to create multiple known coordinates, standing and vice standing vice standing by data from receiving chain of error sources, after three corrections to users, communication WADGPS pseudorange method for positioning accuracy of about 1 ~ 3 meters, CDGPS superior. And stood and vice standing distance can reach over 1000 kilometers.2. Dynamic positioning postprocessingThis is a kind of carrier phase of dynamic positioning technologies. Usually a receiver is placed in the ground, and the other on the known a (or more) receiver in high-speed motion object, jr, afterwards synchronous according to the carrier phase difference between objects in motion relative to determine the location of known. Its characteristic is standing with users need to stand between the transmission of real-time data, the distance between the two is less restricted. But in high-speed motion of the object is how to determine the unknown 0N and the whole week jump problem is the technical difficulties. In recent years, the GPS technology of dynamic initialization OTF (again) greatly improve something comes after the practicability of the dynamic positioning. It can reach thecm-level positioning accuracy. Mainly applicable and low orbit satellite cm-level precision GPS satellite, aerial photogrammetry, airborne gravimetry, magnetic moment of determine the cm-level 3d coordinate of the airborne GPS technology.ed to measure the static(and dynamic) relative positioningStatic relative positioning using two sets of (or above), the GPS receiver respectively in each of the baseline endpoints, synchronous observation above four satellites 0.5 ~ 1 hour, baseline length in 20 kilometers. The baseline netted closed graph, constitute the whole event after adjustment, the precision can reach D5. Applicable to higher+1mm⋅ppmaccuracy of measurement and control of national land earth deformation monitoring, etc.Rapid static relative position in the central area with a base station, GPS receiver continuous tracking all visible satellites, in order to each other a receiver to the above five starting synchronous satellites, each 1 ~ 2 minutes to benchmark station starting at baseline length within 15 kilometers, with the benchmark stood for radiation center. Afterwards the processing precision can reach D+15, but poor reliability. Applicable to smallmm⋅ppmrange of control measure, engineering surveying and cadastration, etc.Accurate dynamic relative position in the zone, a GPS receiver with benchmark for tracking all visible satellites, another a receiver in starting sites for five first above synchronous satellites for 1-2 minutes and then keep track of all of the satellite, under the situation of continuous flow to the observation of the number of seconds, the observatory was starting to stand at the baseline length benchmark within 15 kilometers. Its characteristic is starting to keep each phase lock. In case of loss locks, must extend unlocked site observation time after 1 ~ 2 minutes to determine the unknownN and the0 whole cycle count cycle()φInt. Accurate dynamic relative positioning error in baseline can reach 1 ~ 2 cm long, suitable for engineering measurement circuit measurements and topography measurement, etc.第三节GPS application一、The GPS in engineering applicationIn surveying and mapping, GPS satellite positioning technology field has been used to establish the national geodetic measurement accuracy control network, determination ofthe earth; the dynamic parameters of the global To establish the land and sea, high-precision measurement datum of land and sea islands; measurement of surveying and mapping al Used for monitoring earth plate motion and the crustal deformation, Used for engineering measure, establish a city and the major means of engineering control network, Used for testing the aerospace photography instant camera position, only a very small ground control or no ground control chart, causing rapid aerial geographic information system, the global environment of remote sensing technology revolution.In the survey, using GPS technology to develop international league, establish the control of global network, provide high-precision geocentric coordinate, determination and refining geoid. So, for every Chinese department of surveying and mapping work, establish various measurement control network, provides the high plane and elevation 3d benchmarks.In the engineering survey, the application of static GPS positioning technology, relatively precise control network layont for mining cities, and the subsidence monitoring, oil dam deformation monitoring, high-rise buildings deformation monitoring, tunnel breakthrough measurement precision engineering etc. Encryption, using GPS surveying asbuilts of real-time dynamic positioning technologies (hereinafter referred to as RTK surveying and mapping) of scale topographic map and used in the construction of engineering construction lofting.In aerial photogrammetry, using GPS surveying workers also aerial technology field control measure, aerial electricity GPS navigation, airborne flying into the figure of the electricity, etc.On earth, GPS technology used in dynamic monitoring global and regional plate, plate motion of movement monitoring.The global positioning system (GPS) technology has been used in Marine measurement, underground terrain mapping and, moreover, the military defense, intelligent transportation, post and telecommunications, surveying, coal, oil, building and management of agricultural, meteorology, land, environmental monitoring, finance, public security departments and industry, in aerospace, test, physical detection, etc, also pose measurement are conducted the research and application of GPS technology.二、The GPS in scientific research applicationsThe global positioning system (GPS) used in mobile positioning and economical solutions when we directly transferred to customer service center, the mobile phone to check with customer directly short message (GPS positioning, minutes and seconds data format), if the use of electronic map software, general inter-city direct support of its inputGPS data, minutes and seconds, if use the function orientation LingTu days in Beijing, can use the new 5 special software of GPS positioning master manual input coordinates function orientation, this scheme is suitable for low frequency ZhaChe. Enhanced when customers can purchase special satellite positioning management host, it can not only be receiving many car positioning short message, and stored in computer automatic classification, each vehicle is to build a database of clicking a mouse button, finding a car, as long as all the locating records on target data will automatically switch to electronic map shows the location, click on the progress vehicle or the back button on electronic map can demonstrate in the form of automobile, each vehicle can take different names, facilitate management more cars, very convenient, more frequent query for car. Along with the rapid development of urbanization, urban scale expands unceasingly, to provide convenient and fast traffic intelligent transportation information service system, will be the future trend of development, In addition, navigation and positioning system based on mobile phone service, will become the trend for the people to pursue. In the future, all can move, will depend on the GPS. GPS will like mobile phones, Internet, for our life greatly influence. Therefore, the GPS will form the huge industry value chain, significant social and economic benefits.三、In the emerging field of application of GPSRTK technology is RTK network a milestone in the development of technology. This technique by several stations composed a network, and has a terminal. Each station by telecommunications network (fiber or DDN) will observation data, the central station to station by reference data and the model through a solution within the pressure-difference method is correct and its through GSM/GPRS public Internet user, users send according to the real-time difference correct information can obtain higher precision. Compared with the traditional RTK technology, network RTK distance between the base can be long, sichuan VRS seismological bureau standing space than average system construction of 60 kilometers, is the longest baseline once more than 90 kilometers. So, same area covered only need less station can be achieved, cost can be greatly reduced. At the same time, the concept of network calculation model makes more reliable. Traditional RTK system if a base, the user can occur in the base area in the implementation of homework, covering technology in network RTK nonexistent this problem, because the center will automatically according to the user's position and the operation condition of choosing base stations operations. With modern communication technology, the computer storage technology and the rapid development of space technology, measuring method and mode has achieved great progress. GPS network in the information revolution is RTK arises inthe new space data acquisition method. It combines modern technology of communication and information technology, computer network distributed storage and processing technology of virtual reference, standing technology (VRS) among, and modern geodetic technology. GPS network is more advanced technology of RTK integration, this system for the country's infrastructure provide conveniences. Also for "digital city provides real-time reliable source.2.译文全球定位系统第一节 GPS的原理概述一、全球定位系统GPSGPS(Navigation Satellite Timing and Ranging /Global Position System ),授时与测距导航系统/全球定位系统,简称GPS全球定位系统,是随着现代科学技术的迅速发展而建立起来的新一代卫星导航和精密定位系统。
测绘英语unit24
Notes to the Text
Unit 24 Short description of photogrammetrical techniques(1)
Notes to the Text
2.They have stable and precisely known internal geometries and very low lens distortions. Therefore, they are very expensive devices. The principal distance is constant, which means, that the lens cannot be sharpened when taking photographs. 译文 :它们具有稳定且精确知道的内部几何参数,并且镜头畸变非 常小。因此它们是非常昂贵的设备。主中是个常数,这意味着 摄影时镜头不能对焦。
Unit 24 Short description of photogrammetrical techniques(1)
New words and Expressions
in principle: 原则上,基本上,一般而言,大体上 speak of: 谈到,论及 commercially available: 市场上可买到的,商购的,可以买到的 at infinity: 在无穷远处 calibration [,kæli'breiʃən] n. 校准,校正,标定,刻度,标度
Unit 24 Short description of photogrammetrical techniques(1)
New words and Expressions
develop [di'veləp] v. 显影 differential rectification: 微分纠正 prerequisite ['pri:'rekwizit] n. 先决条件 raster ['ræstə] n. 栅格,光栅 monoplotting: 单像测图 resection [ri'sekʃən] n. 后方交会(法) reature: 放映 orthophoto [,ɔ:θəu'fəutəu] n. 正射影像 obliquely [ə'bli:kly, -'blai-] aj. 倾斜的,转弯抹角的
测绘工程摄影测量中英文对照外文翻译文献

中英文对照外文翻译(文档含英文原文和中文翻译)基于活动熔岩流可见光和热感影像的倾斜摄影测量手持相机数码图像越来越多地被用于科学目的,特别是在非接触式测量是必需的地方。
然而,他们往往由显著的相机到对象的深度的变化和闭塞的斜视组成,复杂化定量分析。
在这里,我们报告通过斜摄影技术来确定基于地面的热感照相机方位(位置并指出方向),并产生在西西里岛火山的熔岩流场景信息。
从基于大众使用的消费级单反数码相机的多个图像来构造一个基于地面热图像的地形模型和参考。
我们展示在2004-2005年火山爆发期间收集的数据和对于基于像素的热感图像,使用派生曲面模型来查看距离改正(考虑大气衰减)。
对于查看约为100至400米的距离,更正导致在辐射强度系统的变化就值方面高达±3%,其是假设在一个统一的平均图像的观看距离计算而得。
关键词:近景摄影测量,埃特纳(Etna)火山,熔岩流,热感图像引言:为了提高我们了解了熔岩如何流动并最终停止,需要更先进的测量(熔岩)流动的发生和冷却的技术技术(Hidaka,等。
2005年)。
卫星数据经常用于监测活火山,但为获取准确的温度信息,可行的空间分辨率为30 m左右的中红外或近红外区域(陆地卫星TM和ASTER数据)或更大的热红外波段(60m的陆地卫星ETM +和ASTER的90米; Donegan和Flynn 2004; Pieri 和 Abrams 2004)。
这些尺寸都大大高于在熔岩流表面热性结构的空间变异,限制冷却模型从而限制卫星数据的使用。
最近手持式热成像仪的使用提供了一个潜在的解决方案,即通过实现1-103m的距离观看,增加空间分辨率10的一因子(1毫米左右)。
因此,手持式热成像仪获取的图像有潜力提供了丰富达到5的(熔岩)流动模型信息,并提供地面实况'信息用于卫星数据的解释(例如Calvari 等。
2005年)。
不过,关键的缺点,存在于大多数近距离数据集(强烈的斜视角,未知的成像几何关系与传感器的空间位置)通常阻碍地理参考和目前制约定量分析。
测绘学术语中英文对照
测绘学术语中英文对照01.普通测量学02.大地测量学02.001 大地测量 geodetic surveying02.002 几何大地测量学geometric geodesy02.003 椭球面大地测量学ellipsoidal geodesy02.004 大地天文学geodetic astronomy02.005 物理大地测量学(又称“大地重力学”) physical geodesy02.006 空间大地测量学space geodesy02.007 卫星大地测量学satellite geodesy02.008 动力大地测量学dynamic geodesy02.009 海洋大地测量学marine geodesy02.010 月面测量学lunar geodesy,selenodesy02.011 行星测量学planetary geodesy02.012 天文大地网(又称“国家大地网”)astro--geodetic network02.013 参考椭球reference ellipsoid02.014 贝塞尔椭球Bessel ellipsoid02.015 海福德椭球Hayford ellipsoid02.016 克拉索夫斯基椭球Krasovsky ellipsoid02.017 参考椭球定位orientation of reference ellipsoid02.018 大地基准geodetic datum02.019 大地坐标系geodetic coordinate system02.020 弧度测量arc measurement02.021 拉普拉斯方位角Laplace azimuth02.022 拉普拉斯点Laplace point02.023 三角测量triangulation02.024 三角点triangulation point02.025 三角锁triangulation chain02.026 三角网triangulation network02.027 图形权倒数weight reciprocal of figure02.028 菲列罗公式Ferreros formula02.029 施赖伯全组合测角法Schreiber method in all combinations02.030 方向观测法method of direction observation,method by series 02.031 测回observation set02.032 归心元素elements of centring02.033 归心改正correction for centring02.034 水平折光差(又称“旁折光差”) horizontal refraction error 02.035 基线测量base measurement02.036 基线baseline02.037 基线网base network02.038 精密导线测量precise traversing02.039 三角高程测量trigonometric leveling02.040 三角高程网trigonometric leveling network02.041 铅垂线plumb line02.042 天顶距zenith distance02.043 高度角elevation angle, altitude angle02.044 垂直折光差vertical refraction error02.045 垂直折光系数vertical refraction coefficient02.046 国家水准网national leveling network02.047 精密水准测量Precise leveling02.048 水准面level surface02.049 高程height02.050 正高orthometric height02.051 正常高normal height02.052 力高 dynamic height02.053 地球位数geopotential number02.054 水准点benchmark02.055 水准路线leveling line02.056 跨河水准测量river-crossing leveling02.057 椭球长半径major radius of ellipsoid02.058 椭球扁率flattening of ellipsoid02.059 椭球偏心率eccentricity of ellipsoid02.060 子午面meridian plane02.061 子午圈meridian02.062 卯酉圈prime vertical02.063 平行圈parallel circle02.064 法截面normal section02.065 子午圈曲率半径radius of curvature in meridian02.066 卯酉圈曲率半径radius of curvature in prime vertical02.067 平均曲率半径mean radius of curvature02.068 大地线geodesic02.069 大地线微分方程differential equation of geodesic02.070 大地坐标geodetic coordinate02.071 大地经度geodetic longitude02.072 大地纬度geodetic latitude02.073 大地高geodetic height,ellipsoidal height02.074 大地方位角geodetic azimuth02.075 天文大地垂线偏差astro—geodetic deflection of the vertical02.076 垂线偏差改正correction for deflection of the vertical02.077 标高差改正correction for skew normals02.078 截面差改正correction from normal section to geodetic02.079 大地主题正解direct solution of geodetic problem02.080 大地主题反解 inverse solution of geodetic problem02.081 高斯中纬度公式Gauss mid—latitude formula02.082 贝塞尔大地主题解算公式Bessel formula for solution of geodetic problem 02.083 高斯一克吕格投影Gauss-Kruger projection又称“高斯投影”。
测绘类词汇中英文对照(2)
测绘类词汇中英文对照(2)开采沉陷观测mining subsidence observation开采沉陷图map of mining subsidence开窗windowing勘测设计阶段测量survey in reconnaissance and design stage 勘探基线prospecting baseline勘探网测设prospecting network layout勘探线测量prospecting line survey勘探线剖面图prospecting line profile map康索尔海图Consol chart康索尔海图Consol chart抗差估计,*稳健估计robust estimation考古摄影测量archaeological photogrammetry克拉索夫斯基椭球Krasovsky ellipsoid克莱罗定理Clairaut theorem克莱罗定理Clairaut theorem刻绘scribing刻图仪scriber坑道平面图Adit planimetric坑探工程测量Adit prospecting engineering survey空基系统space-based system空间大地测量学space geodesy空间改正free-air correction空间后方交会space resection空间前方交会space intersection空间试验室Spacelab空间数据管理系统spatial database management system空间数据基础设施SDI空间数据基础设施spatial data infrastructure空间数据转换spatial data transfer空间信息可视化visualization of spatial information空间异常free-air anomaly空中导线测量aerophotogonometry空中三角测量aerotriangulation空中水准测量aeroleveling控制测量control survey控制测量control survey控制点control point控制点control point库容测量reservoir storage survey跨河水准测量river-crossing leveling块状图block diagram快门shutter矿产图map of mineral deposits矿场平面图mining yard plan矿区控制测量control survey of mining area矿区控制测量control survey of mining area矿山测量mine survey矿山测量交换图exchanging documents of mining survey 矿山测量图mining map矿山测量学mine surveying矿山经纬仪mining theodolite矿体几何[学] mineral deposits geometry矿体几何制图geometrisation of ore body框标fiducial mark框幅摄影机frame camera拉普拉斯点Laplace point拉普拉斯方位角Laplace azimuth兰勃特投影Lambert projection蓝底图blue key浪花Breaker勒夫数Love's number雷达测高仪radar altimeter雷达覆盖区radar overlay雷达应答器radar responder雷达指向标radar ramark类别视觉感受perceptual groupings类型地图typal map离心力centrifugal force离心力centrifugal force离心力位potential of centrifugal force礼炮号航天站Salyut Space Station理论地图学theoretical cartography理论最低低潮面lowest normal low water理论最高潮面highest normal high water历史地图historic map历元平极mean pole of the epoch立标Beacon立井导入高程测量induction height survey through shaft 立井定向测量shaft orientation survey立井激光指向[法] laser guide of vertical shaft立体测图仪stereoplotter立体地图relief map立体观测stereoscopic observation立体观测模型stereoscopic model立体镜stereoscope立体判读仪stereointerpretoscope立体摄影测量stereophotogrammetry立体摄影机stereocamera立体摄影机stereometric camera立体视觉stereoscopic vision立体像对stereopair立体坐标量测量stereocomparator粒子加速器测量particle accelerator survey 连接点tie point连续调continuous tone连续调continuous tone连续对比successive contrast连续方式continuous mode连续方式continuous mode连续减光板continuous attenuator连续减光板continuous attenuator帘幕式快门,*焦面快门curtain shutter帘幕式快门,*焦面快门curtain shutter帘幕式快门,*焦面快门focal plane shutter 联测比对comparison survey联测比对comparison survey联合平差combined adjustment联合平差combined adjustment联盟号宇宙飞船Soyuz Spacecraft联系测量connection survey联系测量connection survey联系三角形法connection triangle method 联系三角形法connection triangle method 联系数correlate联系数correlate亮度lightness量测摄影机metric camera量底法quantity base method量化quantization量化quantizing裂缝观测fissure observation邻带方里网grid of neighboring zone邻图拼接比对comparison with adjacent chart邻图拼接比对comparison with adjacent chart邻元法neighborhood method邻元法neighborhood method林业测量forest survey林业基本图forest basic map零[位]线改正correction of zero line零[位]线改正correction of zero line零漂改正correction of zero drift零漂改正correction of zero drift零相位效应zero-phase effect领海基线测量territorial sea baseline survey六分仪sextant鲁洛夫斯太阳棱镜Roelofs solar prism陆地卫星Landsat滤光片Filter旅游地图tourist map略最低低潮面,*印度大潮低潮面Indian spring low water 略最低低潮面,*印度大潮低潮面lower low water罗经[校正]标compass adjustment beacon罗经[校正]标compass adjustment beacon罗兰-C定位系统Loran-C positioning system罗兰海图Loran chart罗盘经纬仪compass theodolite罗盘经纬仪compass theodolite罗盘仪compass罗盘仪compass罗盘仪测量compass survey罗盘仪测量compass survey逻辑兼容,*逻辑一致性logical consistency芒塞尔色系Munsell color system锚地Anchorage锚位anchorage berth卯酉面prime vertical plane卯酉圈prime vertical卯酉圈曲率半径radius of curvature in prime vertical 蒙绘mask artwork蒙绘,*透写图tracing蒙片mask面水准测量area leveling面状符号area symbol瞄直法sighting line method名义量表nominal scaling名义量表nominal scaling明礁bare rock模糊分类法fuzzy classifier method模糊影像fuzzy image模拟磁带analog tape模拟地图analog map模拟法测图analog photogrammetric plotting模拟空中三角测量analog aerotriangulation模拟立体测图仪analog stereoplotter模拟摄影测量analog photogrammetry模式识别pattern recognition模型连接bridging of model模型缩放scaling of model模型置平leveling of model莫洛坚斯基公式Molodensky formula莫洛坚斯基理论Molodensky theory墨卡托海图Mercator chart墨卡托投影Mercator projection目标发射器target reflector目标区target area目视判读visual interpretation目视天顶仪visual zenith telescope内部定向interior orientation能见度visibility能见敏锐度visibility acuity拟稳平差quasi-stable adjustment逆转点法reversal points method年平均海面annual mean sea level鸟瞰图bird's eye view map欧洲遥感卫星ERS欧洲遥感卫星Europe Remote Sensing Satellite 偶然误差accident error偶然误差random error判读,*判释,*解释interpretation判读仪interpretoscope旁向倾角lateral tilt旁向倾角roll旁向重叠lateral overlap旁向重叠side lap旁向重叠side overlap偏角法method of deflection angle偏振光立体观察vectograph method of stereoscopic viewing 频率误差frequency error频偏frequency offset频漂frequency drift平板仪plane-table平板仪测量plane-table survey平板仪导线plane-table traverse平差值adjusted value平衡潮equilibrium tide平极mean pole平均地球椭球mean earth ellipsoid平均海[水]面mean sea level平均海面归算seasonal correction of mean sea level平均曲率半径mean radius of curvature平均误差average error平均运动mean motion平面控制点horizontal control point平面控制网,*水平控制网horizontal control network平面曲线测设plane curve location平面图plane平面坐标horizontal coordinate平时钟mean-time clock平行圈parallel circle平移参数translation parameters平整土地测量survey for land consolidation平整土地测量survey for land smoothing屏幕地图screen map坡度测设grade location坡面经纬仪slope theodolite剖面图Profiles普拉烈系统PRARE普拉烈系统Precise Range and Rangerate Equipment 普通地图general map普通地图集general atlas普通海图general chart曝光exposure气体激光器gas laser气象代表误差meteorological representation error恰可察觉差JND恰可察觉差just noticeable difference千米尺kilometer scale铅垂线plumb line前方交会[forward] intersection钱德勒摆动Chandler wobble钱德勒摆动Chandler wobble浅地层剖面仪sub-bottom profiler浅色调tint浅滩shoal桥墩定位location of pier桥梁测量bridge survey桥梁控制测量bridge construction control survey桥梁轴线测设bridge axis location切线支距法tangent off-set method切向畸变tangential distortion切向畸变tangential lens distortion倾斜观测tilt observation倾斜位移tilt displacement倾斜仪clinometer倾斜仪clinometer清绘fair drawing求积仪planimeter求积仪platometer球面投影stereographic projection球心投影,*大环投影gnomonic projection区划地图regionalization map区域地图集regional atlas区域地质调查regional geological survey区域地质图regional geological map区域网平差block adjustment曲线光滑line smoothing全景畸变panoramic distortion全景摄影panoramic photography全景摄影机panorama camera全景摄影机panoramic camera全能法测图universal method of photogrammetric mapping 全球导航卫星系统Global Navigation Satellite System全球导航卫星系统GLONASS全球定位系统global positioning system全球定位系统GPS全色红外片panchromatic infrared film全色片panchromatic film全息摄影hologram photography全息摄影holography全息摄影测量hologrammetry全组合测角法method in all combinations权weight权函数weight function权矩阵weight matrix权逆阵inverse of weight matrix权系数weight coefficient热辐射thermal radiation热红外线图像thermal infrared imagery热红外线图像thermal IR imagery人工标志[点] artificial target人机交互处理interactive processing人口地图population map人文地图human map人仪差personal and instrumental equation认知制图cognitive mapping认知制图cognitive mapping任意比例尺arbitrary scale任意投影arbitrary projection任意轴子午线arbitrary axis meridian日月引力摄动lunisolar gravitational perturbation 冗余码redundant code冗余信息redundant information儒略日Julian Day三边测量trilateration survey三边网trilateration network三差相位观测triple difference phase observation 三杆分度仪three-arm protractor三角测量triangulation三角点triangulation point三角高程测量trigonometric leveling三角高程导线polygonal height traverse三角高程网trigonometric leveling network三角基座tribrach三角锁triangulation chain三角网triangulation network三脚架tripod三维地景仿真three-dimensional terrain simulation 三维网three-dimensional network扫海测量sweep扫海测量wire drag survey扫海测深仪sweeping sounder扫海具sweeper扫海区swept area扫海深度sweeping depth扫海趟sweeping trains扫雷区mine-sweeping area扫描数字化scan-digitizing扫描仪scanner色彩管理系统color management system色彩管理系统color management system色调tone色环color wheel色环color wheel色盲片achromatic film色相hue森林分布图forest distribution map晒版plate copying晒版printing down闪闭法立体观察blinking method of stereoscopic viewing 扇谐系数coefficient of sectorial harmonics扇谐系数coefficient of sectorial harmonics熵编码entropy coding上下视差vertical parallax上下视差y-parallax摄谱仪spectrograph摄影比例尺photographic scale摄影测量畸变差,*畸变差photogrammetric distortion摄影测量内插photogrammetric interpolation摄影测量学photogrammetry摄影测量仪器photogrammetric instrument摄影测量与遥感学photogrammetry and remote sensing 摄影测量坐标系photogrammetric coordinate system摄影处理photographic processing摄影分区flight block摄影航线flight line of aerial photography摄影机检校camera caliberation摄影机检校camera caliberation摄影机主距principal distance of camera摄影基线air base摄影基线photographic baseline摄影经纬仪camera transit摄影经纬仪camera transit摄影经纬仪photo theodolite摄影学photography摄站camera station摄站camera station摄站exposure station伸缩仪extensometer深度基准sounding datum深度基准面保证率assuring rate of depth datum深色调shade甚长基线干涉测量very long baseline interferometry生物量指标变换biomass index transformation生物医学摄影测量biomedical photogrammetry声呐扫海sonar sweeping声呐图像sonar image声速改正correction of sounding wave velocity声速改正correction of sounding wave velocity声速计velociment声图判读interpretation of echograms声学多普勒海流剖面仪acoustic Doppler current profiler 声学多普勒海流剖面仪ADCP声学水位计acoustic water level失锁loss of lock施工测量construction survey施工测量construction survey施工方格网square control network施工控制网construction control network施工控制网construction control network石英弹簧重力仪quartz spring gravimeter石油勘探测量petroleum exploration survey时号time signal时号改正数correction to time signal时号改正数correction to time signal时钟频率clock frequency时钟频率clock frequency识别码identification code实时处理real-time processing实时摄影测量real-time photogrammetry 实用地图学applied cartography矢量绘图vector plotting矢量数据vector data矢量重力测量vector gravimetry世界地图集world atlas世界时universal time世界时UT市政工程测量public engineering survey 示坡线slope line视差Parallax视场对比simultaneous contrast视地平线apparent horizon视距sighting distance视距乘常数stadia multiplication constant 视距导线stadia traverse视距加常数stadia addition constant视觉变量visual variable视觉层次visual hierarchy视觉对比visual contrast视觉分辨敏锐度resolution acuity视觉立体地图stereoscopic map视觉平衡visual balance视模型perceived model视线高程elevation of sight视准线法collimation line method视准线法collimation line method适淹礁rock awash适应性水平adaptation level收时time receiving手持水准仪hand level首曲线intermediate contour艏向heading输电线路测量power transmission line survey输油管道测量petroleum pipeline survey鼠标[器] mouse竖盘指标差index error of vertical circle竖盘指标差vertical collimation error竖曲线测设vertical curve location竖直摄影vertical photography数量感quantitative perception数学地图学mathematical cartography数值地籍numerical cadastre数值地籍numerical cadastre数字地图产品标准product standard of digital map双标准纬线投影projection with two standard parallels 双介质摄影测量two-medium photogrammetry双曲线导航图hyperbolic navigation chart双曲线定位,*测距差定位hyperbolic positioning双曲线定位系统hyperbolic positioning system双曲线格网hyperbolic positioning grid双色激光测距仪two-color laser ranger双向航道two-way route水尺tide staff水库测量reservoir survey水库淹没线测设setting-out of reservoir flooded line水雷[危险]区mine [dangerous] area水利工程测量hydrographic engineering survey水面水准surface level水平角horizontal angle水平折光差horizontal refraction error水汽辐射仪water vapor radiometer水深soundings水深测量sounding水深测量自动化系统automatic hydrographic survey system 水声定位acoustic positioning水声定位系统acoustic positioning system水声全息系统acoustic holography system水声应答器acoustic responder水铊lead水听器hydrophorce水位water level水位分带改正correction of tidal zoning水位分带改正correction of tidal zoning水位改正correction of water level水位改正correction of water level水位曲线curves of water level水位曲线curves of water level水位遥报仪communication device of water level水位遥报仪communication device of water level水文观测,*水文测验hydrometry水文要素hydrologic features水下摄影测量underwater photogrammetry水下摄影机underwater camera水准测量leveling surveying水准尺leveling staff水准点Benchmark水准路线leveling line水准面level surface水准器Bubble水准网leveling network水准仪,*水准器level水准原点leveling origin瞬间地图twinkling map瞬时极instantaneous pole瞬时视场IFOV瞬时视场instantaneous field of view丝网印刷silk-screen printing斯托克斯公式Stokes formula斯托克斯理论Stokes theory撕膜片peel-coat film四色印刷four color printing似大地水准面quasi-geoid搜索区searching area岁差precession隧道测量tunnel survey穗帽变换tasseled cap transformation缩微地图microfilm map缩微摄影microcopying缩微摄影microphotography缩小仪photoreducer塔尔科特测纬度法Talcott method of latitude determination台链station chain太阳辐射波谱solar radiation spectrum太阳光压摄动solar radiation pressure perturbation太阳同步卫星sun-synchronous satellite态势地图posture map特殊水深special depth特征feature特征编码feature coding特征码feature codes特征码清单feature codes menu特征提取feature extraction特征选择feature selection特种地图particular map体素voxel天波干扰sky-wave interference天波修正sky-wave correction天顶距zenith angle天顶距zenith distance天球坐标系celestial coordinate system天球坐标系celestial coordinate system天文大地垂线偏差astro-geodetic deflection of the vertical 天文大地网astro-geodetic network天文大地网平差Adjustment of astrogeodetic network天文点astronomical point天文定位系统astronomical positioning system天文方位角astronomical azimuth天文经度astronomical longitude天文经纬仪astronomical theodolite天文年历astronomical almanac天文年历astronomical ephemeris天文水准astronomical leveling天文纬度astronomical latitude天文重力水准astro-gravimetric leveling天文坐标测量仪astronomical coordinate measuring instrument 天线高度antenna height田谐系数coefficient of tesseral harmonics田谐系数coefficient of tesseral harmonics条幅[航带]摄影机continuous strip camera条幅[航带]摄影机continuous strip camera条幅[航带]摄影机strip camera条件方程condition equation条件方程condition equation条件平差condition adjustment条件平差condition adjustment铁路工程测量railroad engineering survey通用横墨尔卡投影Universal Transverse Mercator projection 通用极球面投影Universal Polar Stereographic projection通用极球面投影UPS通用墨卡尔投影UTM同步观测simultaneous observation同步验潮tidal synobservation同名光线corresponding image rays同名光线corresponding image rays同名核线corresponding epipolar line同名核线corresponding epipolar line同名像点corresponding image points同名像点corresponding image points同名像点homologous image points统计地图statistic map投影变换projection transformation投影差height displacement投影差relied displacement投影方程projection equation投影器Projector投影器主距principal distance of projector投影晒印projection printing透光率transmittance透明负片transparent negative透明正片transparent positive透明注记stick-up lettering透视截面法perspective traces透视投影perspective projection透视旋转定律,*沙尔定律Chasles theorem透视旋转定律,*沙尔定律Chasles theorem透视旋转定律,*沙尔定律rotation axiom of the perspective 透视旋转定律,*沙尔定律rotational theorem图幅mapsheet图幅编号sheet designation图幅编号sheet number图幅接边edge matching图幅接合表index diagram图幅接合表sheet index图根点mapping control point图根控制mapping control图解纠正graphical rectification图解图根点graphic mapping control point图廓edge of the format图廓map border图历簿mapping recorded file图例legend图面配置map layout图象picture图像编码image coding图像变换image transformation图像处理image processing图像分割image segmentation图像分析image analysis图像复合image overlaying图像几何纠正geometric rectification of imagery 图像几何配准geometric registration of imagery 图像理解image understanding图像描述image description图像识别image recognition图像数字化image digitization图像增强image enhancement图形graphics图形-背景辨别F-G discrimination图形-背景辨别Figure-ground discrimination图形符号graphic symbol图形记号graphic sign图形权倒数weight reciprocal figure图形元素graphic elements土地规划测量land planning survey土地利用现状图present landuse map土地信息系统land information system土地信息系统LIS推荐航线recommended route托帕可斯卫星T/P托帕克斯卫星TOPEX/POSEIDON拖底扫海aground sweeping陀螺定向光电测距导线gyrophic EDM traverse陀螺方位角gyro azimuth陀螺经纬仪gyro theodolite陀螺经纬仪gyroscopic theodolite陀螺仪定向测量gyrostatic orientation survey椭球扁率flattening of ellipsoid椭球长半轴,*地球长半轴semimajor axis of ellipsoid 椭球短半轴,*地球短半轴semiminor axis of ellipsoid 椭球面大地测量学ellipsoidal geodesy椭球偏心率eccentricity of ellipsoid拓扑地图topological map拓扑关系topological relation拓扑检索topological retrieval外部定向exterior orientation网点stipple网格地图grid map网格法grid method网格结构grid structure网屏screen网纹片transparent foil网线ruling危险界限limiting danger line微波测距仪microwave distance measuring instrument 微波辐射microwave radiation微波辐射计microwave radiometer微波图像microwave imagery微波遥感microwave remote sensing微波遥感器microwave remote sensor微重力测量microgravimetry维纳频谱Winer spectrum维宁•曼尼斯公式V ening-Meinesz formula伪彩色图像pseudo-color image伪等值线地图pseudo-isoline map伪距测量pseudo-range measurement卫星测高satellite altimetry卫星大地测量satellite geodesy卫星定位satellite positioning卫星多普勒[频移]测量satellite Doppler shift measurement卫星多普勒定位satellite Doppler positioning卫星高度satellite altitude卫星跟踪卫星技术satellite-to-satellite tracking卫星跟踪卫星技术SST卫星跟踪站satellite tracking station卫星共振分析analysis of satellite resonance卫星构形satellite configuration卫星-惯导组合定位系统satellite-inertial guidance integrated positioning sy卫星轨道改进improvement of satellite orbit卫星激光测距satellite laser ranging卫星激光测距,侧视雷达SLR卫星激光测距仪satellite laser ranger卫星-声学组合定位系统satellite-acoustics integrated positioning system卫星受摄运动perturbed motion of satellite卫星像片图satellite photo map卫星星下点sub-satellite point卫星运动方程equation of satellite motion卫星重力梯度测量satellite gradiometry卫星姿态satellite attitude位置[线交]角intersection angle of LOP位置函数,*坐标函数position function位置精度positional accuracy位置线line of position位置线LOP位置线方程equation of LOP文化地图cultural map文化地图cultural map纹理分析texture analysis纹理增强texture enhancement沃尔什变换Walsh transformation无线电定位radio positioning无线电航行警告radio navigational warning无线电指向标,*电指向radio beacon无线电指向标表list of radio beacon五角棱镜pentaprism物镜分辨力resolving power of lens物理大地测量学,*大地重力学physical geodesy 误差检验error test误差理论theory of errors误差椭圆error ellipse雾[信]号fog signal系列地图series maps系统集成system integration系统误差systematic error弦线支距法Chord off-set method弦线支距法Chord off-set method显微摄影photomicrography现势地图up-to-data map线路平面图route plan线路水准测量route leveling线路中线测量center line survey线路中线测量center line survey线路中线测量location of route线纹米尺,*日内瓦尺standard meter线形锁linear triangulation chain线形网linear triangulation network线性调频脉冲Chirp线性调频脉冲Chirp线阵遥感器linear array sensor线阵遥感器pushbroom sensor线状符号line symbol限差tolerance限航区restricted area乡村规划测量rural planning survey相对定位relative positioning相对定向relative orientation相对定向元素element of relative orientation相对航高relative flying height相对论改正relativistic correction相对误差relative error相对重力测量relative gravity measurement相干声呐测深系统interferometric seabed inspection sonar 相关平差Adjustment of correlated observation相关器correlator相关器correlator相位传递函数phase transfer function相位传递函数PTF相位多值性phase ambiguity相位模糊度解算phase ambiguity resolution相位漂移phase drift相位稳定性phase stability相位周,*巷lane相位周,*巷phase cycle相位周值,*巷宽lane width相位周值,*巷宽phase cycle value镶嵌索引图index mosaic巷道验收测量footage measurement of workings象限仪quadrant象形符号replicative symbol像场角angular field of view像等角点isocenter of photograph像底点photo nadir point像地平线,*合线horizon trace像地平线,*合线image horizon像地平线,*合线vanishing line像幅picture format像空间坐标系image space coordinate system像片photo像片photograph像片比例尺photo scale像片地质判读,*像片地质解译geological interpretation of photograph 像片方位角azimuth of photograph像片方位元素photo orientation elements像片基线photo base像片纠正photo rectification像片内方位元素elements of interior orientation 像片判读photo interpretation像片平面图photoplan像片倾角tilt angle of photograph像片外方位元素elements of exterior orientation 像片镶嵌photo mosaic像片旋角swing angle像片旋角yaw像片主距principal distance of photo像平面坐标系photo coordinate system像移补偿image motion compensation像移补偿IMC像元pixel像主点principal point of photograph像主纵线principal line [of photograph]销钉定位法stud registration小潮升neap rise小潮升neap rise小角度法minor angle method小像幅航空摄影SFAP小像幅航空摄影small format aerial photography 协调世界时coordinate universal time协调世界时coordinate universal time协调世界时UTC协调世界时时号time signal in UTC协方差函数covariance function协方差函数covariance function心象地图mental map新版海图new edition of chart新版海图new edition of chart信号杆signal pole信息量contents of information信息量contents of information信息提取information extraction信息属性information attribute星载遥感器satellite-borne sensor行差run error行星大地测量学planetary geodesy行政区划图administrative map修版retouching虚地图virtual map虚拟地景virtual landscape序惯平差sequential adjustment悬式经纬仪hanging theodolite旋转参数rotation parameters选取限额norm for selection选取限额norm for selection选取指标index for selection选权迭代法iteration method with variable weights寻北器north-finding instrument寻北器north-finding instrument寻北器polar finder压力验潮仪pressure gauge亚太区域地理信息系统基础设施常设委员会PCGIAP亚太区域地理信息系统基础设施常设委员会Permanent Committee on GIS Infrastructure for Asia and the Pacific严密平差rigorous adjustment沿海测量coastwise survey沿海测量coastwise survey颜色空间color space颜色空间color space验潮tidal observation验潮仪tide-meter验潮站tidal station验潮站零点zero point of the tidal阳像positive image遥感remote sensing遥感测深remote sensing sounding遥感模式识别pattern recognition of remote sensing 遥感平台remote sensing platform遥感数据获取remote sensing data acquisition遥感制图remote sensing mapping野外地质图field geological map野外填图field mapping因瓦基线尺invar baseline wire阴像negative image阴像negative image引潮力tide-generating force引潮位tide-generating potential引航图集pilot atlas引力gravitation引力位gravitational potential引水锚地pilot anchorage引张线法method of tension wire alignment印刷版printing plate荧光地图fluorescent map影像image影像imagery影像地质图geological photomap影像分辨力image resolution影像分辨力resolving power of image 影像复原image restoration影像金字塔image pyramid影像匹配image matching影像融合image fusion影像数据库image database影像相关image correlation影像镶嵌image mosaic影像质量image quality游艇用图smallcraft chart游艇用图yacht chart渔礁fishing rock渔堰fishing haven渔业用图fishing chart渔栅fishing stake宇宙制图cosmic mapping宇宙制图cosmic mapping预报地图Prognostic map预打样图pre-press proof预制符号preprinted symbol预制感光板,*PS 版presensitized plate 原子钟atomic clock圆曲线测设circular curve location圆曲线测设circular curve location圆-圆定位,*距离-距离定位range-range positioning圆柱投影cylindrical projection圆柱投影cylindrical projection圆锥投影conic projection圆锥投影conic projection远程定位系统long-range positioning system远海测量pelagic survey月平均海面monthly mean sea level月球轨道飞行器lunar orbiter运动方程分析解analytical solution of motion equation 运动方程数值解numerical solution of motion equation 运动方程数值解numerical solution of motion equation 运动线法Arrowhead method晕滃法hachuring晕渲法hill shading载波相位测量carrier phase measurement载波相位测量carrier phase measurement再分结构subdivisional organization凿井施工测量construction survey for shaft sinking凿井施工测量construction survey for shaft sinking栅格绘图raster plotting栅格数据raster data站心坐标系topocentric coordinate system章动nutation章动nutation照相排字机phototypesetter照相制版镜头printer lens照相制版镜头process lens照准点sighting point照准点归心sighting centring真地平线,*真水平线true horizon真实孔径雷达real-aperture radar真误差true error真子午线true meridian整体大地测量integrated geodesy整体感associative perception整体结构extensional organization正常高normal height正常高normal height正常水椭球,*水准椭球normal level ellipsoid 正常水椭球,*水准椭球normal level ellipsoid 正常引力位normal gravitation potential正常引力位normal gravitation potential正常重力normal gravity正常重力normal gravity正常重力场normal gravity field正常重力场normal gravity field正常重力公式normal gravity formula正常重力公式normal gravity formula正常重力位normal gravity potential正常重力位normal gravity potential正常重力线normal gravity line正常重力线normal gravity line正方形分幅square mapsubdivision正片positive正象right-reading正直摄影normal case photography正直摄影normal case photography正轴投影normal projection正轴投影normal projection郑和航海图Zheng He's Nautical Chart政治地图political map支水准路线spur leveling line直方图规格化histogram specification直方图均衡histogram equalization直角坐标网rectangular grid志田数Shida'a number制图分级cartographic hierarchy制图分级cartographic hierarchy制图简化cartographic simplification制图简化cartographic simplification制图精度mapping accuracy制图夸大cartographic exaggeration制图夸大cartographic exaggeration制图专家系统cartographic expert system制图专家系统cartographic expert system制图资料cartographic document制图资料cartographic document制图资料source material质底法quality base method质量感qualitative perception秩亏平差rank defect adjustment置信度Confidence置信度Confidence中程定位系统medium-range positioning system中国测绘学会Chinese Society of Geodesy, Photogrammetry and Cartog中国测绘学会CSGPC中国测绘学会Chinese Society of Geodesy, Photogrammetry and Cartog中国测绘学会CSGPC中国大地测量星表CGSC中国大地测量星表Chinese Geodetic Stars Catalogue中国大地测量星表CGSC中国大地测量星表Chinese Geodetic Stars Catalogue中华人民共和国测绘法Surveying and Mapping Law of the People's Republic of中天法transit method中误差RMSE中误差root mean square error中心式快门between-the-lens shutter中心式快门lens shutter中星仪transit instrument中性色调,*灰色调middle tone中央子午线central meridian中央子午线central meridian钟偏clock offset钟偏clock offset钟速clock rate钟速clock rate重采样resampling重力gravity重力测量gravity measurement重力场gravity field重力潮汐改正correction of gravity measurement for tide重力潮汐改正correction of gravity measurement for tide 重力垂线偏差gravimetric deflection of the vertical重力垂直梯度vertical gradient of gravity重力点gravimetric point重力固体潮观测gravity observation of Earth tide重力归算gravity reduction重力基线gravimetric baseline重力基准gravity datum重力数据库gravimetric database重力水平梯度horizontal gradient of gravity重力梯度测量gradiometry重力梯度测量gravity gradient measurement重力梯度仪gradiometer重力位gravity potential重力仪gravimeter重力异常gravity anomaly周期误差periodic error周跳cycle slip周跳cycle slip轴颈误差error of pivot主垂面principal plane [of photograph]主垂面principal vertical plane主动式遥感active remote sensing主分量变换Principal component transformation主合点principal vanishing point主核面principal epipolar plane主核线principal epipolar line主检比对main/check comparison主台main station。
全球定位系统 毕业论文外文文献翻译
外文资料及译文1.外文资料全球定位系统第一节The principle of GPS一、GPSGPS(Navigation Satellite Timing and Ranging /Global Position System ),GPS clock and distance navigation system/global positioning systems, referred to as globalpositioning system (GPS), along withthe rapid development of modernscience and technology, and set up anew generation of satellite navigationand positioning system precision.Global positioning system (GPS) is in1973 by U.S. defense forces began toorganize, and common basiccompletion in 1993. This systemconsists of space constellation, groundcontrol and user receiver is composedof three parts.(一)Global positioning system 图1-1 GPS Satellite distribution1.1 Space constellationGPS space by 24 working partconstellation spare satellite and three satellite. Work in 6 orbit satellite distribution within the surface. Each track surface distribution has 3 ~ 4 satellite, satellite orbits earth's equator Angle relative to the average height of 55, orbit for 20200 kilometers. Satellite operating cycle for 11 hours 45 minutes. Therefore, in the same station daily satellite layout is roughly same, just four minutes every day in advance. Each satellite about 5 hours every day in the horizon, located above the horizon of the satellite number with more time and place, at least 4 November, most. This layout can guarantee on earth at any time, any place can also observed above four satellites.Satellite signal transmission and reception and the influence, so the GPS is a global, all-weather real-time navigation and positioning for system. After the completion of the global positioning system, its work in the space distribution of satellite 1-1 as shown. GPS satellite zips are installed on the light, microprocessors, message signal emission equipment, storage, and provide power supply by solar cells have little fuel, satellite is used to regulate the satellite orbit and posture, and in the monitor of instruction, start spare satellite.1.2 The ground monitoring systemGPS ground monitoring system in the world by five sites. One master station, 3 injection station. Five monitor are equipped with automatic acquisition, data center, double-frequency GPS receiver, precision clock, environmental data sensors and computing devices, and to master station provides all kinds of observation data. Master station (in Colorado) for system management and data processing center, its main content is the use of this site and other monitor the observation data of the satellite's star calendar calculation and satellite clock and atmospheric delay correction parameter, provide global positioning system, and the time base station, these parameters to adjust sidetracked into orbit, the satellite to enable spare satellite instead of failure satellite, etc. Injection station master station will be calculated and satellite star calendar, clock, satellite navigation message and other control commands into corresponding satellite etc, and storage system into the correctness of monitoring information. Besides, the master station, GPS ground monitoring system, various unattended highly automated and standardized work.1.3 User equipment partsUser equipment including GPS receiver host, antenna, power and data processing software component. The host for the microcomputer, quartz oscillators core, and the corresponding input and output interface, and equipment. In the special software under control, the host for homework, satellite data acquisition, processing and storage of the equipment, the system state inspection, alarm and maintenance, the receiving system of automatic management. Antenna, often used for collecting all from each azimuth, arbitrary nonnegative Angle of satellite signal. Due to the satellite antenna pedestal weak signal in a pre-amplifier, amplification, reoccupy coaxial cable input host. Power supply for host and aerial part, can use through rectifier voltage, the mains, also can use the accumulator.(二)Global positioning system (GPS) signalsGPS satellite launch a coherent wave, the wavelength 1L and frequency respectively 2L :f MHZ,cm f MHZ,cm L L L L 11221575421912276024====..λλ1L and 2L as a carrier with two modulation signal, a kind of navigation signal, another kind is message signal. Navigation signal S Mb 023.1 is divided again, frequency m A C 293=λ for code rate for the coarse yards (C/A code) and the rate SMb 023.1for the essence, the frequency of m p 3.291=λcode (P). Thick yards (C/A code) repeat each signal encoding, can quickly capture signal, according to the design for rough positioning, Pure code (P) yards signal encoding every seven, and repeat each satellite, structure is very complex, not capture, but can be used for accurate positioning. Message signal while the rate s bit 50to the carrier 1L and 2L modulation in, including satellite, the correct star calendar and satellite working state. Through the message signal receiver can choose the best one group of graphics, positioning signals observation data processing..第二节 GPS Positioning method一、 GPS Positioning method classification(一)、 The static and dynamic positioningBy means of static GPS positioning and can be divided into dynamic positioning.1、Static positioningIf you stay in the surrounding relatively fixed protection can not perceive motion, or movement is so slowly that require months or years, namely that can be reflected in the earth for fixed-point relative coordinates is fixed, the determination method for the coordinates of static positioning is called. In the mathematics model of the static localization, the position is constant. Due to the rapid solutions of GPS "unknown" technology of the cycle time of operation, static already shortened to a few minutes, so, in addition to the original geodetic measurement and monitoring of the force applied, rapid static orientation has been widely applied to the common measurement and engineering measurement.2、 Dynamic positioningCars, ships, aircraft and aircraft in motion, people often need to know their real-time position. In these sports carrier mounted on GPS receiver, real-time GPS signals measured antenna location, called the GPS kinematic positioning. If the only measure the real-time position, the carrier of sports also determine the speed, time and location, etc, thus guidingstatus parameters to reserve the object orientation, called the navigation movement. GPS navigation is virtually dynamic positioning.(二)、Absolute positioning and relative locationAccording to determine the GPS receiver in earth coordinate system in different position, can be divided into a single absolute positioning and the relative positioning, such as machine, 2-1.1、Absolute positioning图2-1 Absolute and relative positioningTo determine the absolute positioning is independent coordinate system in the position of the dot. Because single absolute positioning error by satellite reception when the effect, low precision. Mainly used for low precision dynamic positioning, such as ships, aircraft navigation of mineral resources, geological investigation, Marine fishing and determine the relative position of the initial value.2、Relative positioningRelative location is determined simultaneous tracking same GPS signals of several sets of the relative position between the receiver is a kind of method. Since the synchronous observation, the synchronization of many error signal obtained station is identical or similar (such as satellite clock error, error, the signal of the star alex atmospheric transmission error, etc.), can avoid or weaken these errors, obtain high relative position. Relative positioning, signal processing and data than absolute orientation is complex, relative positioning is the synchronization between baseline vector (station), and 3d coordinate need at least a spot for known to the rest of the each point coordinates. The static and dynamic positioning can position by relative positioning, such as earthdeformation measurement, ground control aerial photogrammetry, etc.In the dynamic positioning, often USES "difference", a GPS receiver will be placed on the base coordinate, known as the receiver in sports, all receivers carrier, according to the known synchronous control results, the positioning correct number starting position, in order to improve the real-time to positioning accuracy. This is based on a single point positioning and relative location of positioning mode.(三)、 Pseudorange method and the carrier phase methodGPS satellite positioning, according to the different signal processing, can divide again pseudorange method and the carrier phase method.1、Pseudorange methodThe positioning principle is simple. When positioning, receiver and the oscillation ofA satellite signal the same group (P yards range yards or C/A code), through delay and receiver receive signals, when two groups compared each other completely coincide (related to signal measured signals, namely for the delay in quantity, satellite signal transmission time with A series of modified times the speed of light, satellites and draw the oblique distance antenna phase center. If the four (or above), i.e. the distance can satellite stations calculate intersection method of location and clock error four unknown. Due to the wavelength m p 3.29λrange yards m A C 293=λ. To one percent of the estimated $yards range resolution, length of to 0.3 meters (P) and 3 meters (C/A code) the ranging accuracy. Therefore, the pseudorange accuracy is relatively low.2、The carrier phase methodThe carrier is a measure of carrier signal, measurements, determine the satellite signal and reference signal receiver, calculate the phase difference observation. Then the same principle and pseudorange method, the position of the station clock error, etc. The wavelength modulated symbol cm L 191=λ,cm L 242=λ, than much shorter wavelength of one percent, to $yards range resolution, estimating length reached 1.9 cm (P) and 2.4 L centimeters (C/A code) the ranging accuracy. In the measurement and precision air triangle measuring, high precision, often USES relative positioning method, the carrier phase to eliminate system error.The carrier phase method for measuring the complete phase observation data ϕfrom several parts:ϕϕϕϕφφ=-=+=++S R R N N I n tF 00~()() (2-1)Type: s ϕfor the first phase, the observational S,R ϕ for the position of the receiverobservation R phase, ~ϕfor the actual phase observations,0N for the whole cycle count,also called the whole cycle unknown, ()φInt for the actual observation time t the integer part, first observed 0t for the duration of zero, every moment, observation 0t by continuous accumulated through counter counts, called after the cycle count, ()φR F for the actual observation in the integer part, with high precision measurement.二、GPS positioning operation modeMainly includes GPS real-time GPS navigation positioning, afterwards (with) the dynamic positioning and used to measure the static or dynamic) relative orientation accurate.1 . GPS kinematic positioningGPS real-time navigation) is required (and observation data in the positioning of the moment, its main purpose is to navigation. AS mentioned above, the absolute positioning (single point positioning) by the us government's "SA" (choose usability) and "AS" (the electronic technology, the influence of deception by civil service standard of GPS level position precision of 100 meters. So many users using differential GPS system (CDGPS and WADGPS) to improve the precision. CDGPS pseudorange method and the users of the station standing range within 100 miles, precision for 5 ~ 10 meters. The carrier phase method CDGPS (also called RTK) standing and users in the station within range, 30 kilometers, the accuracy of cm. And WADGPS big scope is to create multiple known coordinates, standing and vice standing vice standing by data from receiving chain of error sources, after three corrections to users, communication WADGPS pseudorange method for positioning accuracy of about 1 ~ 3 meters, CDGPS superior. And stood and vice standing distance can reach over 1000 kilometers.2. Dynamic positioning postprocessingThis is a kind of carrier phase of dynamic positioning technologies. Usually a receiver is placed in the ground, and the other on the known a (or more) receiver in high-speed motion object, jr, afterwards synchronous according to the carrier phase difference between objects in motion relative to determine the location of known. Its characteristic is standing with users need to stand between the transmission of real-time data, the distance between the two is less restricted. But in high-speed motion of the object is how to determine the unknown 0N and the whole week jump problem is the technical difficulties. In recent years, the GPS technology of dynamic initialization OTF (again) greatly improve something comes after the practicability of the dynamic positioning. It can reach thecm-level positioning accuracy. Mainly applicable and low orbit satellite cm-level precision GPS satellite, aerial photogrammetry, airborne gravimetry, magnetic moment of determine the cm-level 3d coordinate of the airborne GPS technology.ed to measure the static(and dynamic) relative positioningStatic relative positioning using two sets of (or above), the GPS receiver respectively in each of the baseline endpoints, synchronous observation above four satellites 0.5 ~ 1 hour, baseline length in 20 kilometers. The baseline netted closed graph, constitute the whole event after adjustment, the precision can reach D5. Applicable to higher+1mm⋅ppmaccuracy of measurement and control of national land earth deformation monitoring, etc.Rapid static relative position in the central area with a base station, GPS receiver continuous tracking all visible satellites, in order to each other a receiver to the above five starting synchronous satellites, each 1 ~ 2 minutes to benchmark station starting at baseline length within 15 kilometers, with the benchmark stood for radiation center. Afterwards the processing precision can reach D+15, but poor reliability. Applicable to smallmm⋅ppmrange of control measure, engineering surveying and cadastration, etc.Accurate dynamic relative position in the zone, a GPS receiver with benchmark for tracking all visible satellites, another a receiver in starting sites for five first above synchronous satellites for 1-2 minutes and then keep track of all of the satellite, under the situation of continuous flow to the observation of the number of seconds, the observatory was starting to stand at the baseline length benchmark within 15 kilometers. Its characteristic is starting to keep each phase lock. In case of loss locks, must extend unlocked site observation time after 1 ~ 2 minutes to determine the unknownN and the0 whole cycle count cycle()φInt. Accurate dynamic relative positioning error in baseline can reach 1 ~ 2 cm long, suitable for engineering measurement circuit measurements and topography measurement, etc.第三节GPS application一、The GPS in engineering applicationIn surveying and mapping, GPS satellite positioning technology field has been used to establish the national geodetic measurement accuracy control network, determination ofthe earth; the dynamic parameters of the global To establish the land and sea, high-precision measurement datum of land and sea islands; measurement of surveying and mapping al Used for monitoring earth plate motion and the crustal deformation, Used for engineering measure, establish a city and the major means of engineering control network, Used for testing the aerospace photography instant camera position, only a very small ground control or no ground control chart, causing rapid aerial geographic information system, the global environment of remote sensing technology revolution.In the survey, using GPS technology to develop international league, establish the control of global network, provide high-precision geocentric coordinate, determination and refining geoid. So, for every Chinese department of surveying and mapping work, establish various measurement control network, provides the high plane and elevation 3d benchmarks.In the engineering survey, the application of static GPS positioning technology, relatively precise control network layont for mining cities, and the subsidence monitoring, oil dam deformation monitoring, high-rise buildings deformation monitoring, tunnel breakthrough measurement precision engineering etc. Encryption, using GPS surveying asbuilts of real-time dynamic positioning technologies (hereinafter referred to as RTK surveying and mapping) of scale topographic map and used in the construction of engineering construction lofting.In aerial photogrammetry, using GPS surveying workers also aerial technology field control measure, aerial electricity GPS navigation, airborne flying into the figure of the electricity, etc.On earth, GPS technology used in dynamic monitoring global and regional plate, plate motion of movement monitoring.The global positioning system (GPS) technology has been used in Marine measurement, underground terrain mapping and, moreover, the military defense, intelligent transportation, post and telecommunications, surveying, coal, oil, building and management of agricultural, meteorology, land, environmental monitoring, finance, public security departments and industry, in aerospace, test, physical detection, etc, also pose measurement are conducted the research and application of GPS technology.二、The GPS in scientific research applicationsThe global positioning system (GPS) used in mobile positioning and economical solutions when we directly transferred to customer service center, the mobile phone to check with customer directly short message (GPS positioning, minutes and seconds data format), if the use of electronic map software, general inter-city direct support of its inputGPS data, minutes and seconds, if use the function orientation LingTu days in Beijing, can use the new 5 special software of GPS positioning master manual input coordinates function orientation, this scheme is suitable for low frequency ZhaChe. Enhanced when customers can purchase special satellite positioning management host, it can not only be receiving many car positioning short message, and stored in computer automatic classification, each vehicle is to build a database of clicking a mouse button, finding a car, as long as all the locating records on target data will automatically switch to electronic map shows the location, click on the progress vehicle or the back button on electronic map can demonstrate in the form of automobile, each vehicle can take different names, facilitate management more cars, very convenient, more frequent query for car. Along with the rapid development of urbanization, urban scale expands unceasingly, to provide convenient and fast traffic intelligent transportation information service system, will be the future trend of development, In addition, navigation and positioning system based on mobile phone service, will become the trend for the people to pursue. In the future, all can move, will depend on the GPS. GPS will like mobile phones, Internet, for our life greatly influence. Therefore, the GPS will form the huge industry value chain, significant social and economic benefits.三、In the emerging field of application of GPSRTK technology is RTK network a milestone in the development of technology. This technique by several stations composed a network, and has a terminal. Each station by telecommunications network (fiber or DDN) will observation data, the central station to station by reference data and the model through a solution within the pressure-difference method is correct and its through GSM/GPRS public Internet user, users send according to the real-time difference correct information can obtain higher precision. Compared with the traditional RTK technology, network RTK distance between the base can be long, sichuan VRS seismological bureau standing space than average system construction of 60 kilometers, is the longest baseline once more than 90 kilometers. So, same area covered only need less station can be achieved, cost can be greatly reduced. At the same time, the concept of network calculation model makes more reliable. Traditional RTK system if a base, the user can occur in the base area in the implementation of homework, covering technology in network RTK nonexistent this problem, because the center will automatically according to the user's position and the operation condition of choosing base stations operations. With modern communication technology, the computer storage technology and the rapid development of space technology, measuring method and mode has achieved great progress. GPS network in the information revolution is RTK arises inthe new space data acquisition method. It combines modern technology of communication and information technology, computer network distributed storage and processing technology of virtual reference, standing technology (VRS) among, and modern geodetic technology. GPS network is more advanced technology of RTK integration, this system for the country's infrastructure provide conveniences. Also for "digital city provides real-time reliable source.2.译文全球定位系统第一节 GPS的原理概述一、全球定位系统GPSGPS(Navigation Satellite Timing and Ranging /Global Position System ),授时与测距导航系统/全球定位系统,简称GPS全球定位系统,是随着现代科学技术的迅速发展而建立起来的新一代卫星导航和精密定位系统。
测量学各章词汇及英文对照

1 / 4第一章测绘Surveying测定survey测设layout setting-out survey普通测量学general survey大地测量学geodetic survey摄影测量与遥感学photogrammetry and remote sensing海洋测绘学marine surveying工程测量学engineering surveying制图学cartography测量基准面datum plane大地水准面geodetic surface; geiod铅垂线plumb-line水准面level plane参考椭球面reference ellipsoid旋转椭球rotating ellipsoid大地坐标系Geodetic coordinate system大地经度earth longitude (B)大地纬度earth latitude (L)空间直角坐标系spatial rectangular coordinates独立平面直角坐标系independent plane rectangular coordinate system 高斯平面直角坐标系Gauss plane rectangular coordinate system高斯投影Gaussian projection高程系统height system高程原点height datum曲率curvity/curvature平面控制测量The plane control survey 高程控制测量Elevation control survey第二章水准测量Leveling Surveying水平视线horizontal sight高程elevation:height高差Difference of height后视backsight前视foresight水准尺Leveling rod水准仪The Level(instrument)水准点Bench Mark尺垫turning point plate微倾式水准仪slightly leaning level (instrument)望远镜telescope水准气泡bubble管水准器tube level bubble圆水准器round level bubble基座base物镜objectives目镜eyepieces聚焦透镜the focus lens十字丝分划板the cross partition board 目镜调焦螺旋eyepiece optical screw 物镜调焦螺旋objectives optical screw 管水准器tube level bubble圆水准器round level bubble三脚架The tripod视差parallax视准轴Collimation axis水准点Bench mark水准路线Leveling line闭合水准路线Alosed level route:A loop level route附合水准路线 A line level route:Annexed level route,支水准路线An open-ended level route:Spur level route.转点Turning point闭合差misclosures闭合差允许误差:Misclosure allowable error检核check校正Calibration自动安平水准仪Autometic level补偿器compensator铟瓦水准尺Invar rod电子水准仪Electronic level条码尺Barcode rod误差:error仪器结构部件中英文对照:1. Slightly sloping spiral:微倾螺旋2. Partition board shield:分划板护罩2 / 43. Eyepiece:目镜4. The objective convergence spiral:物镜对光螺旋5. Braking spiral:制动螺旋6. Fine-tune the spiral:微动螺旋7.Base:底板8. Triangle linking piece:三角压板9.Feet spiral: 脚螺旋10. Spring cap:弹簧冒11. The telescope:望远镜12 . Objective :物镜13. Tube level:管水准器14 .Round level manometers:圆水准器15. Connections small screws: 连接小螺丝16. Shaft block: 轴座第三章角度测量Angles surveying水平角Horizontal angle(HA)竖直角The vertical angle(VA)光学经纬仪optical theodolite(transit) 照准部Collimation device望远镜Telescope,竖直度盘vertical dish, vertical circle水准管Level bubble读数设备Readings equipment水平度盘Horizontal dish测微尺Micro-distance measuring sensor垂球Plumb bob对中centering整平level光学对中器optical centering device侧回法Observation set method方向观测法direction observation method竖直角指标误差Index error of vertical angle竖轴The vertical axis VV水平轴The horizontal axis HH望远镜视准轴The telescope collimation CC 对中误差Plummet error目标偏心差Target eccentric error电子经纬仪Electronic theodolite第四章距离测量Distance surveying直线定向line orientation钢尺Steel tape定线Fixing line视距测量Stadia measurement电磁波测距仪Electromagnetic rangefinder微波测距仪Microwave rangefinder光电测距仪Photoelectric rangefinder 激光测距仪Laser rangefinder红外测距仪Infrared rangefinder相位测距仪Phase type rangefinder脉冲式测距仪Pulsed rangefinder全反射棱镜Total reflecting prisms真北方向True north direction磁北方向Magnetic north direction坐标北方向Coordinates north direction 方位角Azimuth真方位角True azimuth (A)磁方位角Magnetic azimuth(Am)坐标方位角Grid azimuth(α)磁偏角Magnetic declination子午线收敛角meridian convergence罗盘compass第五章全站仪TOTAL STATION水平制动、微动螺旋Horizontal motion clamp, Horizontal tangent screw光学对中器Optical plummet telescope 粗瞄镜Sighting collimator物镜Objective lens整平脚螺旋Leveling screw竖直制动、微动螺旋Vertical motion clamp, Vertical tangent screw目镜Telescope eyepiece管水准器Plate level圆水准器Circle level单棱镜组Single prism system超站仪(Smart station) Automatic total station , ultra station instrument交会测量Resection measurement放样测量Setting-out survey对边测量Missing Line Measurement (MLM)悬高测量Remote Elevation Measurement (REM)第六章测量平差:Surveying Adjustment测量误差:surveying errors系统误差:Systematic error偶然误差:random error;accidental error最或是值:The most probable value多余观测:Redundant observation算术平均值:arithmetic average ;Arithmetic means精度指标:Accuracy index中误差:Root mean square error (RMSE)允许误差:Allowable error相对误差:Relative error观测值改正数:Observation correction value误差传播定律:Law of errors propagation全微分:Total differential权:Weight加权平均值:The weighted average (mean)权倒数传播定律:Weight reciprocal propagation law第七章控制测量:Control surveying碎部测量:detailed surveying平面控制网:Plane control network高程控制网:Elevation control network 小区域控制网:Small area control network控制点:control points国家控制网:State Control netGPS测量:GPS surveying导线测量:traverse surveying三角测量:trigonometric survey三边测量:trilateral surveying光电测距仪:photoelectric rangefinder 闭合导线:Closed traverse;附和导线:Connecting traverse;支导线:Open traverse.野外勘察:Field reconnaissance坐标方位角:Coordinates azimuth交会定点:Intersection fixed-point测边交会:Side-surveying intersection第八章大比例尺地形图测绘:Topographic Surveying and Mapping in Large Scale 地形:Terrain地物:Ground feature地貌:Landscape比例尺:Scale依比例符号:Proportional symbols非比例符号:Disproportional symbols 半比例尺符号(线性符号):Semi- Disproportional symbols (Linear symbols )地形图图式:map schemata地貌符号:Landscape symbols等高线:Contour line注记符号:Note symbols等高距:contour interval等高线平距:contour horizontal distance 山头:Peak洼地:depressions示坡线:slope line山脊:Ridge与山谷: valley合水线:Close waterline分水线:watershed line鞍部(垭口):Saddle陡坡:Steep悬崖:cliff首曲线(又称基本等高线):intermediate contour计曲线(又称加粗等高线):index contour 间曲线(又称半距等高线):half-interval contour地形图分幅与编号:Subdivision and index梯形分幅与编号:Trapezoid subdivision and index平板仪及其使用:Plane table视距丝:Stadia silk竖直角的竖盘:Perpendicular plate地形图的拼接:splice地形图的整饰:trim第九章图号、图名和接图表:map number, map name, adjacent map chart图廓:Map border比例尺:Scale坡度比例尺:Slope scale横断面:transverse section纵断面: Longitudinal section, Vertical section, Longitudinal profile汇水面积:catchment area土方量估算:Earthwork estimating Highway route selection:高速路选线数字地面模型:Digital terrain model (DTM)第十章工程测量:construction surveying测设(放样)Setting out (layout, position):Layout putout setout 第十一章交点Intersection point路线转角Course turning angle (route turning angle)里程Mileage里程桩Mileage pile转点Turning point导线点Route point圆曲线起点Begin circle圆曲线中点Middle circle圆曲线终点End circle复曲线公切点Point圆曲线Circular curve圆曲线测设元素Circular Curve Surveying Elements切线长Tangent length曲线长Curve length外距Outside distance圆曲线详细测设detailed layout of circular curve切线支距法Tangent offset method偏角法:deflection-method缓和曲线Transition curve曲率curvature curvity平曲线Horizontal curve (plane curve) 极坐标法(Polar coordinating method圆外基线法(External circular baseline method)复曲线mixed curve Compound Curve 回头曲线Hair-pin Curve第十二章纵断面Longitudinal profile surveying 横断面latitude profile surveying基平测量control leveling。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中英文资料外文翻译(文档含英文原文和中文翻译)航空摄影测量中的立体模型重建摘要本文描述的是现代航空摄影测量的操作问题和基本的技术需要。
当立体模型重建时,利用航空摄影测量中的外方位元素决定摄影测量点的精度和在对应的模型点中的Y-视差分析。
真正的航空摄影,在图像的比例,由1:2 500至1:6 0000,与DGPS/IMU的数据来源于各种地形,在中国由我们的POS-支持的大型区域网平差计划WuCAPS处理。
实证结果证实来源于大型区域网平差的外方位元素的精度符合地形勘测规范的要求。
然而,通过POS确定的外方位元素的精度不能满足地形勘测规范的要求。
关键词空中三角测量(AT);GPS(全球定位系统);POS(定位和定向系统);立体模型重建;地面控制点(GCPs);精度导言航空摄影测量是从空中影像获得关于地球表面的三维空间信息的科学和技术。
摄影点的决定,其中通过使用图像找出地面对象,是依据识别物体的遥感。
并且问题的关键是迅速和准确地确定图像的位置和行为上的即时影像。
通过基于分布式地面控制点的空中三角测量满足这一目标。
随着空间定位技术的发展,遥感技术和计算机科学,以及空中三角测量的演变和发展走向没有地面控制点的数字化勘测。
早在1950年,摄影科学家就开始研究如何利用各种辅助数据,以减少地面控制点的需要。
然而,由于技术的局限性,方法没有变成现实。
直到20世纪70年代,出现了美国的全球定位系统(GPS),在航空摄影过程中人们仅得到通过载波相位差分全球定位系统(DGPS)技术来确定曝光驻地的位置(即航摄照片的三个线性元素),用于执行空中三角测量(简称GPS-支持AT)可以减少摄影对地面控制点的依赖,缩短测绘周期;并降低生产成本,在摄影测量的领域触发革命。
然而,GPS-支持AT在空中摄影测量的操作是有利的,主要是在浩大和困难的区域,在中小型的比例尺,而不是带状区域和城市大比例尺测图。
在20世纪90年代,人们开始探讨采用GPS/lNS集成系统(也称POS)获取照片的位置和姿态(即利用GPS获得曝光驻地的位置,由IMU获得图像姿态元素),目的是照片的定向,最终目标是取代区域空中。
三角测量程序。
现代数字摄影测量学在4D产品(DEM,DOM,DLG,DRG)的自动化的生产和空间数据库的更新中将扮演一个重要角色。
本文将介绍航空摄影测量学和相关的技术需要在当前的操作应用,特别是,摄影信息链的几何定位精度可从照片方向到立体模型重建获得,旨在探讨4D产品生产的可实行性。
人民希望这项研究的研究结果可以在国土普查,地图测绘和基础地理信息采集方面为航空摄影测量的操作提供指导。
1 现代航空摄影测量的模式现今,航空摄影测量主要有三种模式,即标准的航空摄影测量、GPS-支持航空摄影测量和POS-支持航空摄影测量。
它们主要程序如图1所示。
从图1,我们可以了解到,区别这三种模式的方法主要是如何获取的航摄照片以及照片的方向。
对于标准空中三角测量,它是通过区域空中三角测量的大量地面控制点获得模型定向点的坐标来完成图像的定向。
对于GPS-支持AT,在航空照片获得的过程中,动态GPS定位是用来代替地面控制点以确定曝光中心的位置和获得该模型定向点的坐标,然后用于纠正图像的方向。
对于POS-支持AT,图像和它们对应的方位元素(图像的六个外方位元素)都是已获取的,用于了解在曝光时刻几何反演摄影存储的空间位置和姿态。
2 相关技术要求2.1 空中摄影在现代航空摄影,为了提高获得的图像质量,除了新增飞行控制系统到空中摄影机以外(例如ASCOT,CCNS4,空中跟踪系统),当采取GPS空中摄影和在照相机上安置POS系统进行DGPS/IMU空中摄影时,方法还包括牢固黏附与照相机的一台GPS接收器。
根据空中摄影的不同的模式,我们可以制定一个负责计划如图2所示。
2.2 地面控制计划在数字摄影测量工作站,空中三角测量进行了理论上的最严格的大型区域网平差,但为了获得照片最佳的传输点的坐标和方向的外方位元素,地面控制计划的设计应如图3所示,即不同模式的空中摄影。
2.3 数字映射从理论上说,在得到准确的内外方位元素的图像之后,可衡量的立体模型可利用模型重建恢复,其中我们可以做地形的测绘以及物体的自动运行。
然而,目→立体像对的相对定向→单一前的四维产品的生产工艺是:单张照片的内定向→立体模型的测绘。
该方法的模型只有通过POS-支持的航空摄模型的绝对定向影测量直接地理参考恢复。
3 实验和分析航摄定位有两种方法。
其中之一被称作区域空中三角测量,关于图像点的坐标,地面控制点的坐标和(或)图像的外方位元素加权观测值,并结合大型区域网平差来解决图像定向参数和目标点的空间坐标,来作为方向控制点的立体模型绘图和做高度精确的几何定位的应用。
为不同尺度和地形类型的航空摄影测量,航摄照片办公室操作的地形图规格定义了各自空中三角测量方法,地面控制计划,以及传输点精度的具体标准。
这种方法已被建立并得到了广泛的应用。
另一种是所谓的直接地理参考,假定高精确的图像外方位元素是可以得到的,在立体像对中通过使用图像坐标系统的同名像点的坐标,利用空间交会计算出对应的目标点物体的空间坐标。
这种方法直接地确定对象的位置,因此4D产品可以被生产。
然后本文将主要讨论当利用各种方式获得图像的外方位元素时,如何定位精度可以完成立体模型的Y视差。
3.1 数据如表1所示,来自不同领域的4个组的实际图像的实验被实施。
所有的底片被扫描,其分辨率为21米,为了得到连接点,POS-支持的大型区域网平差软件WuCAPS被用于图像的测试1,测试2和测试4,自制的JX- 4数字摄影测量工作站用于图像的测试3。
根据相对定向的结果与由WuCAPS去除严重错误的功能,地面控制点全部在立体镜方式下手动地被测量,并且所有图像点的统计精度(RMS)均优于±6.0米。
在那以后,我们使用Applanix POS/AV系统的后处理软件POSPac做测试场校准和DGPS和IMU数据的整合,然后通过应用坐标系变换和系统误差改正每个图像的六个外方位元素,这是由POS系统规定的,可以获得。
表1 实验计划中的图像参数测试1 测试2 测试3 测试4 时间2004.11 2005.1 2005.9 2005.10飞机Yun-12 Yun-12 Yun-8 Aviation-Ⅱ照相机Leica RC-30 Leica RC-30 Leica RC-30 Leica RC-30 班次控制系统航空轨道航空轨道CCNS 4 CCNS 4 POS系统POS AV 510 POS AV 510 POS AV 510 POS AV 510 GPS接收机Astech Trimble 5 700 Trimble 5 700 Trimble 5 700 底片Kodak 2 444 Kodak 2 044 Kodak 2 402 Kodak 2 402 距离原则/mm 153.84 303.64 154.06 153.53框架/cm×cm 23×23 23×23 23×23 23×23 相片比例1:2 500 1:3 000 1:32 000 1:60 000前部重叠度/% 61 63 64 64边缘重叠度/% 32 33 33 30航带数量9 10 9 4控制带 2 2 2 0相片255 377 244 48GCPs 73 160 34 29密集点 3 631 5 442 2 951 712 区域/km×km 4×5 5×8 47×52 40×57最大地带波动/m38.6(平坦地区)181.6(山地)729.3(高山地区)109.3(低地)GPS更新比率/s 2 0.5 1 1 GPS时间设定/min10 10 5 5 静态GPS/min 5 5 5 5人工GPS/m 0.303,0.110,-2.029 0.303,-0.110,-2.002-2.015,-0.030,3.1022.034,-0.520,1.320人工IMU/m 0.000,0.200,-0.559 0.000,0.200,-0.7100.000,-0.201,0.427-0.006,-0.202,0.4303.2 外方位元素的性能为了得到通过不同的方法分析外方位元素的性能,标准AT与边缘密集地面控制点和GPS-支持AT与四组完全地面控制点在基础领域被首先执行,可以获得每幅图像的六个外方位元素,并且它们的理论精度可以估计。
然后我们假设标准的结果作为“真理”并估计通过POS提供的外方位元素的性能。
结果如表2所示。
从表1我们看到的图像的测试1,测试2可用于生产规模为1:500〜1:2 000的四维产品,图像的测试4可用于生产规模为1:5000〜1:10 000的四维产品。
在空中摄影测量办公运行的地形图规格原则中,测试1,测试2,测试3和测试4分别属于平坦的土地,山地,高山区的土地和低地。
如表2的结果,一些结论可归纳如下。
表2 不同方法的外方位元素精度的确定图像方法σ/mμGCPs 控制 Pts 控制pts残差的RMS EO的理论精度水平垂直水平垂直X Y XY Z mXs/mYs/mZs/)(/''ϕ)(/''ω)(/''k测试1 Std.5.7 23 39 49 33 0.09 0.06 0.1040.0790.0280.0300.01912.1 13.1 4.4GPS 7.0 4 4 67 67 0.10 0.09 0.1370.1050.0300.0340.0299.2 11.9 5.9POS 0.1230.1120.09362.8 40.7 32.4测试2 Std.4.9 39 69 116 86 0.06 0.06 0.0870.1280.0970.1040.03922.6 24.4 4.1 GPS 6.7 4 4 151 151 0.10 0.10 0.1430.1530.0800.1380.06821.3 25.8 12.1 POS 0.2240.2940.16553.2 43.9 45.1测试3 GPS 7.6 4 4 30 30 0.74 0.76 1.0610.5030.2030.2400.2329.7 10.9 9.9POS 1.0641.4141.78135.9 31.8 31.9测试4 Std.7.6 15 19 10 14 1.30 1.29 1.8301.4540.9200.9460.67518.8 18.5 6.9GPS 7.0 4 4 25 25 1.55 2.33 2.7981.2750.8780.9880.65817.9 19.6 6.5POS 1.3242.8492.81761.8 57.1 67.3 注:1)Std.,GPS和POS取于通过边缘密集GCPs标准的方法获得的外方位元素,各自的GPS-支持与四种正式的基础GCPs和POS系统(与下表相同)。