现代检测技术实例教程5.第五章霍尔与热电偶传感器
传感器与检测技术第05章
d d W e dt dt
W--线圈匝数: Φ--线圈所包围的磁通量。
若线圈相对磁场运动为速度v或角转度ω时,上式可改写为 e=-WBlv 或 e=-WBsω
在传感器中,当结构参数确定后.即B、l、W、s均为定值,
那么感应电势e与线圈相对磁场的运动速度(v或ω)成正比。 根据上述原理。人们设计了两种类型的结构:一种是变
二、积分电路
无源积分电路原理图:
有源积分电路原理图:
有源和无源积分电路的对数渐近幅频特性:
一个实用的有源积分电路图:
三、微分电路
实用有源微分电路 无源微分电路
基本有源微分电路
有源微分电路的幅频特性
5.1.4 磁电感应式传感器应用举例
一、磁电感应式振动速度传感器( CD-1型振动速度传感器)
的一种传感器。
5.2.1 霍尔效应和霍尔元件材料
一、霍尔效应
B
--------
fL fE EH I
b
+++ + ++ +++
l
一块长为 l、宽为b、厚为 d的半导体薄片置于磁感应 强度为B的磁场(磁场垂直于薄片)中,当有电流I流过时, 在垂直于电流和磁场的方向上将产生电动势 UH 。这种现
象称为霍尔效应。
d
物理现象观察
霍尔效应
霍尔效应的输入输出特性为:
UH
IB IB RH k H IB ned d
(当磁场与薄片法线有α 夹角时)
U H k H IB cos
压力、机械振动等
二、霍尔元件材料
霍尔式传感器是由霍尔元件所组成,可测微小位移、
磁通式;另一种是恒定磁通式。
1 变磁通式磁电感应式传感器结构原理图
(a)为开磁路变磁通式传感器:当被测旋转体转动时,线圈中产 生感应电势,其变化频率等于被测转速与测量齿轮上齿数的乘积。
第5章热电偶传感器及应用 自动检测技术课件

定律是参考端温度计算修正法的理论依 据
热电偶中间温度定律示意图
2020/10/29
22
例2
镍铬-镍硅热电偶,工作时其自由端温度 为30℃,测得热电势为39.17mV,求被 测介质的实际温度。
在热电偶回路中接触电动势远远大于温差电动势, 所以温差电动势可以忽略不计
E A B ( T 、 T 0 ) e A B ( T ) e A B ( T 0 ) k e T l n n n A B - k e T 0 l n n n A B k e ( T - Τ 0 ) l n n n A B
2020/10/29
23
解:
由t0=0℃,查镍铬-镍硅热电偶分度表, E(30,0)=1.2mV,又知E(t,30)
=39.17mV
所以E(t,0)= E(30,0)+E(t,
30)=1.2mV+39.17mV=40.37mV。 再用40.37mV反查分度表得977℃,即
被测介质的实际温度。
路,当闭合回路的两个结点分别置于不 同的温度场中时,回路中将产生一个电 势,这种现象称为“热电效应”。 1821年由Seeback发现的,故又称为赛 贝克效应。
2020/10/29
5
热电偶回路原理
2020/10/29
6
热电势由两部分组成
两种导体组成的回路称为“热电偶”, 这两种导体称为“热电极”,产生的电 势则称为“热电势”,热电偶的两个结 点,一个称为测量端(工作端或热端), 另一个称为参考端(自由端或冷端)。
热端指向冷端的静电场,该静电场阻止
电子从热端向冷端移动,最后达到动态
实验05(霍尔式传感器)实验报告
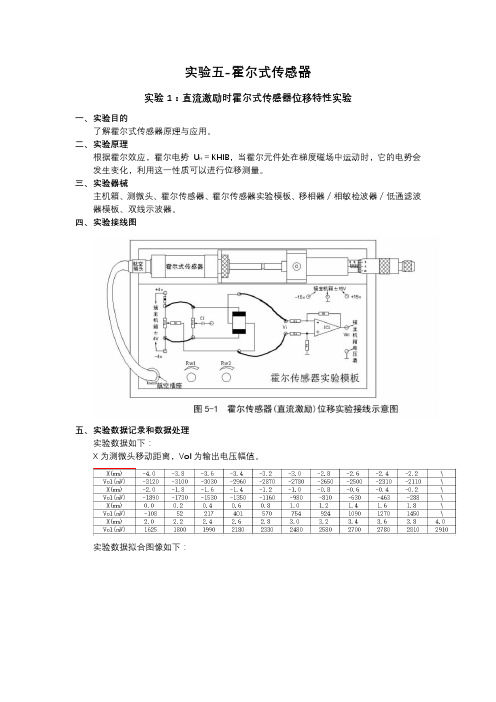
实验五-霍尔式传感器实验1:直流激励时霍尔式传感器位移特性实验一、实验目的了解霍尔式传感器原理与应用。
二、实验原理根据霍尔效应,霍尔电势U H=KHIB,当霍尔元件处在梯度磁场中运动时,它的电势会发生变化,利用这一性质可以进行位移测量。
三、实验器械主机箱、测微头、霍尔传感器、霍尔传感器实验模板、移相器/相敏检波器/低通滤波器模板、双线示波器。
四、实验接线图五、实验数据记录和数据处理实验数据如下:X为测微头移动距离,Vol为输出电压幅值。
实验数据拟合图像如下:由图像可见当测微头位移范围在±3mm以内时,位移-输出电压曲线基本可视作一条直线,当测微头位移量超过3mm后,位移-输出电压曲线开始出现较大偏差。
当测微头位移范围为±2mm时,直线拟合方程为y=875.05x-123.05。
当测微头位移范围为±4mm 时,直线拟合方程为y=835.97x-133.07灵敏度和非线性误差:当测微头总位移量为±2mm时,灵敏度为875.05(V/m),非线性误差为0.542%当测微头总位移量为±4mm时,灵敏度为835.97(V/m),非线性误差为5.919%六、实验思考题本实验中霍尔元件位移的线性度实际上反映的是什么量的变化?实验中霍尔元件位移的线性度反映了系统灵敏度的变化。
当线性度较大时,说明此时系统的灵敏度较之前已经发生较大改变,位移-输出电压曲线的非线性进一步增大实验2:交流激励时霍尔式传感器位移特性实验一、实验目的了解交流激励时霍尔式传感器的特性。
二、实验原理:交流激励时霍尔式传感器与直流激励一样,基本工作原理相同,不同之处是测量电路。
三、实验器械主机箱、测微头、霍尔传感器、霍尔传感器实验模板、移相器/相敏检波器/低通滤波器模板、双线示波器。
四、实验接线图五、实验数据记录和数据处理实验数据如下:X为测微头移动距离,Vol为输出电压幅值。
实验数据拟合图像如下:非线性误差:当测微头总位移量为±2mm时,非线性误差为2.765% 当测微头总位移量为±4mm时,非线性误差为10.849%。
第5章《传感器及其应用》参考答案

第5章《传感器及其应用》第1节 揭开传感器的“面纱”【学习目标】1.了解传感器在生产和生活中的应用。
2.知道非电学量转换成电学量的技术意义。
3.知道传感器的最基本原理及其一般结构。
4.知道敏感元件的作用。
【要点透析】1. 什么是传感器?传感器是把非电学物理量(如位移、速度、压力、温度、湿度、流量、声强、光照度等)按一定规律转换成便于处理和传输电学量(如电压、电流等)的一种元件。
传感器输入的是非电学物理量,输出的是电学量。
将非电学物理量转换成电学量后,测量比较方便,而且能输入到计算机进行处理。
各种传感器是自动控制设备中不可缺少的元件,已经渗透到宇宙开发、环境保护、交通运输以至家庭生活等多种领域。
2.传感器的组成传感器一般由敏感元件、转换元件和测量电路三部分组成,有时还需要加辅助电源。
如图5.1-1所示。
敏感元件(预变换器):将不能够直接变换为电量的非电量转换为可直接变换为电量的非电量元件。
敏感元件是传感器的核心部分,它是利用材料的某种敏感效应(如热敏、光敏、压敏、力敏、湿敏等)制成的。
转换元件:将感受到的非电量直接转换为电量的器件称为转换元件,如压电晶体、热电偶等。
转换电路:将转换元件输出的电量变成便于显示、记录、控制和处理的有用电信号的电路称为测量电路。
3.传感器的分类传感器的种类很多,目前尚没有统一的分类方法,一般常采用的分类方法有如下几种:(1)按工作原理分类物理传感器:利用物质的物理性质和物理效应感知并检测出待测对象信息的传感器,如电容传感器、电感传感器、光电传感器、压电传感器等;化学传感器:利用化学反应识别和检测信息的传感器,如气敏传感器、湿敏传感器等; 生物传感器:利用生物化学反应识别和检测信息的传感器,它是由固定生物体材料和适图5.1-1 敏感元件当转换器件组合成的系统。
如组织传感器、细胞传感器、酶传感器等。
(2)按用途分类这种分类方法给使用者提供了方便,容易根据需要测量的对象选择所需要的传感器。
《传感器与检测技术》 5.2 霍尔传感器

5.2.3 霍尔元件的主要特性参数: U H K H BI
(1) 输入电阻和输出电阻
记霍尔常数
UH
记霍尔片的灵敏系数 可见霍尔电势UH与B、I
成正比和导体厚度d成反比.
IB RH d
RH 1 KH d ned
U H K H BI
故霍尔元件常常制成薄片形状,近似1微米。
只能用半导体材料作霍尔元件?
1 N型材料电阻率 ne
1 P型材料电阻率 pe
霍尔电势是磁场方向与霍尔基片法线方向之间夹角的函数。 应用:霍尔式磁罗盘、霍尔式方位传感器、霍尔式转速传感器
End the 5.2
2. 温度误差及其补偿
温度误差产生原因:
霍尔元件的基片是半导体材料,因而对温度的变 化很敏感。其载流子浓度和载流子迁移率、电阻 率和霍尔系数都是温度的函数。 当温度变化时,霍尔元件的一些特性参数,如霍 尔电势、输入电阻和输出电阻等都要发生变化, 从而使霍尔式传感器产生温度误差。
减小霍尔元件的温度误差
1. 不等位电势误差的补偿 2. 温度误差及其补偿
1. 不等位电势误差的补偿
不等位电势是零位误差的主要部分,与霍尔电势有相同的
数量级,有时超过霍尔电势。
可以把霍尔元件视为一个四臂电阻电桥,不等位电势就相
当于电桥的初始不平衡输出电压。
方法:并 联电阻
霍尔元件等效电路
不等位电势的补偿电路
对称电路简单,对温度稳定性要好些
热电偶传感器课件

05
热电偶传感器实验与操作
实验目的和原理
实验目的 掌握热电偶传感器的基本原理和工作特性。
了解热电偶传感器的测量电路和信号处理方法。
实验目的和原理
• 通过实验操作,培养实验技能和动手能力。
实验目的和原理
实验原理
热电偶传感器是一种基于热电效应的测温元件,由两种不同的导体或半导体制成回路,当两 端存在温差时,回路中就会产生热电动势。
热电偶传感器具有测量精度高、测量范围广、稳定性好等优点,被广泛应用于温度测量领域。
实验步骤和注意事项
实验步骤 1. 准备实验器材和热电偶传感器。
2. 搭建测量电路,连接热电偶传感器和测量仪表。
实验步骤和注意事项
3. 对热电偶传感器进 行标定,记录标定数 据。
5. 对测量数据进行处 理和分析,得出实验 结果。
保护套管
用于保护热电极免受被测介质化学腐蚀和机械损伤,同时起到固定和绝 缘的作用。
03
接线盒
用于连接热电偶丝和补偿导线,方便安装和维修。
热电偶分类与特点
分类
根据热电偶的材质、结构和使用环境等不同特点,可将其分 为多种类型,如K型、S型、E型、J型、T型等。
特点
不同类型的热电偶具有不同的测温范围、精度、稳定性等特 点。例如,K型热电偶具有线性度好、热稳定性高、测温范围 广等优点;而S型热电偶则具有精度高、抗氧化性能强等特点 。
工业过程自动化
石油化工
在石油化工行业,热电偶传感器 被用于测量和控制反应釜、分馏 塔等设备的温度,实现生产过程
的自动化和优化。
电力行业
热电偶传感器在电力行业中被广泛 应用于汽轮机、锅炉等设备的温度 监测与控制,提高发电效率和安全 性。
第5章热电偶传感器及其应用

2021/2/21
第5章热电偶传感器及其应用
22
例:已知铂铑30—铂的E(1084.5℃,0℃)=13.937mV, 铂铑6—铂的E(1084.5℃,0℃)=8.354mV,
求:铂铑30—铂铑6在同样温度条件下的热电动势。 解:设A为铂铑30电极,B为铂铑6电极,C为铂电极。
已知:t=1084.5℃,t0=0℃ 根据参考电极定律:
接触面处 形成电场
8
该电场的存在阻碍了电子的继续扩散,当电子扩散
达到动态平衡时,就在接触区形成一个稳定的电位
差,即接触电动势,其大小为:
eABT
kTlnnA e nB
T —— 接触处的绝
对温度;
k ——波尔兹曼常数
(k = 1.38×1023J/K)
e ——电子电荷(e
= 1.6×10-19C)
接触电动势的数值取决于两种导体的性质(n)
2021/2/21
第5章热电偶传感器及其应用
24
§5.2 热电偶的种类和结构
工程上用于热电偶的材料应满足以下条件: 1)热电势变化尽量大; 2)热电势与温度关系尽量接近线性关系; 3)物理、化学性能稳定; 4)易加工, 复现性好, 便于成批生产。 实际上并非所有材料都能满足上述要求。 目前在国际上被公认比较好的热电材料只有几种。
铂铑10—铂热电偶 1300℃ 镍铬—镍硅(镍铬—镍铝 )热电偶 900℃ 镍铬—考铜热电偶 600℃
铂铑30—铂铑6热电偶 1600℃
常用的镍铬一镍硅(K)热电偶的分度表(课本197页 附录D)。(热电偶的热电动势与温度的对照表 )
2021/2/21
第5章热电偶传感器及其应用
31
八种国际通用热电偶:
实际应用中, 热电势与温度之间关系是通过热电偶分度表来 确定的。分度表是在参考端温度为0℃时, 通过实验建立起来 的热电势与工作端温度之间的数值对应关系。
传感器与检测技术-霍尔式传感器及应用

2023/9/5
8
常用的霍尔元件材料
锗、硅、砷化铟、锑化铟等半导体材料。 其中N型锗容易加工制造,其霍尔系数、 温度性能和线性度都较好。N型硅的线 性度最好,其霍尔系数、温度性能同N 型锗相近。锑化铟对温度最敏感,尤其 在低温范围内温度系数大,但在室温时 其霍尔系数较大。砷化铟的霍尔系数较 小,温度系数也较小,输出特性线性度 好。
40
霍尔钳形电流表(交直流两用) 豁口
压舌
2023/9/5
41
1—输入轴 2—转盘 3—小磁铁 4—霍尔传感器
2023/9/5
38
霍尔式接近开关
当磁铁的有效磁 极接近、并达到动作 距离时,霍尔式接近 开关动作。霍尔接近 开关一般还配一块钕 铁硼磁铁。
2023/9/5
39
所实现的多媒体界面: 霍尔电流传感器演示 铁心
线性霍尔IC
EH=KH IB
2023/9/5
2023/9/5
13
7.1.3 霍尔元件主要参数及其误差
1.主要特性参数
(1)乘积灵敏度KH (2)额定控制电流Icm (3)磁灵敏度KB (4)输入电阻Ri、输出电阻R。 (5)不等位电势Uo和不等位电阻Ro (6)寄生直流电势UOD (7)霍尔电势温度系数α
(8)工作温度范围
2023/9/5
2023/9/5
11
2.霍尔元件的连接
(1)当控制电流为直流输入时,为了得 到较大的霍尔输出,可将几块霍尔元件 的输出串联。但控制电流必须并联,决 不能串联。因为串联起来将有大部分控 制电流被相连的霍尔电势极短接。
2023/9/5
12
(2)当控制电流为交流输入时,可采用 如图连接方式,这样可以增加霍尔输出 电势及功率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图5-1 有刷直流电机模型
1879 年,美国物理学家霍尔经过大量的实验发现:如果让一恒定 电流通过一金属薄片,并将薄片置于强磁场中,在金属薄片的另外两 侧将产生与磁场强度成正比的电动势。这个现象后来被人们称为霍尔 效应,由于这种效应在金属中非常微弱,当时并没有引起人们的重视。 1948 年以后,由于半导体技术迅速发展,人们找到了霍尔效应比较明 显的半导体材料,并制成了锑化铟、硅、砷化镓等材料的霍尔元件。
当叶片遮挡在霍尔IC面前时,PNP型霍尔IC的输出为 霍尔式无触点汽车电子点火装置 (续)
汽车电子点火电路及波形 b)霍尔IC及点火线圈高压侧输出波形
1—点火开关 2—达林顿晶体管功率开关 3—点火线圈低压侧 4—点火线圈铁心 5—点火线圈高压侧 6—分火头 7—火花塞
汽车电子点火装置使用的点火控制器、霍尔传感器及点火总成
磁铁
点火总成
5.2 热电偶传感器应用
导入:在工业生产中,温度是表征对象和过程状态的重要参数之一。 比如,发电厂锅炉的温度必须控制在一定范围内;一些化学反应的工艺 过程必须在适当的温度下才能正常进行;炼油过程中,原油必须在不同 的温度和压力条件下进行分馏才能得到汽油、柴油、煤油等产品。金属 热处理中的退火炉温度是主要被控变量,退火炉温度控制的稳定性直接 影响产品的质量。那么怎样实现温度控制? 热电偶是工业上最常用的一种测温元件,是一种能将温度转换为电动 势的装置,在接触式测温仪表中,具有信号易于传输和变换、测温范围 宽、测温上限高等优点。在机械工作的多数情况下,这种温度传感器主 要用于500~1 500℃范围内的温度测量。
第五章 霍尔传感器和热电偶 传感器典型应用
5.1
霍尔传感器的应用
5.2
热电偶传感器应用
【学习目标】
● 了解霍尔效应、霍尔元件电路符号、基本特性和基本结构。 ● 掌握霍尔位置传感器无刷直流电机的实现。 ● 掌握霍尔元件的典型应用。 ● 掌握热电偶的工作原理、基本定律及温度补偿方法。 ● 掌握热电偶常用的温度补偿方法。 ● 掌握热电偶的典型应用。
低电平,晶体管功率开关处于导通状态,点火线圈低压侧 有较大电流通过,并以磁场能量的形式储存在点火线圈的 铁心中。
当叶片槽口转到 霍尔IC面前时,霍尔 IC输出跳变为高电平, 经反相变为低电平, 达林顿管截止,切断 点火线圈的低压侧电 流。由于没有续流元 件,所以存储在点火 线圈铁心中的磁场能 量在高压侧感应出 30~50kV的高电压。 a)电路
无刷直流电机模型
无刷直流电机转动原理
霍尔式无刷电动机
霍尔式无刷电动机取消了换向器和
刷,而采用霍尔元件来检测转子和定 之间的相对位置,其输出信号经放大、 形后触发电子线路,从而控制电枢电 的换向,维持电动机的正常运转。由 无刷电动机不产生电火花及电刷磨损 问题,所以它在录像机、CD唱机、光
普通直流电动机使用的电刷和换 向器
等家用电器中得到越来越广泛的应用。
无刷电动机在电动自行车上的应用
电动自行车
电动自行车
无刷电动机
可充电 电池组
无刷直流电动机的外转子采用高性能钕铁硼稀土 永磁材料;三个霍尔位置传感器产生六个状态编码信 号,控制逆变桥各功率管通断,使三相内定子线圈与 外转子之间产生连续转矩,具有效率高、无火花、可 靠性强等特点。
霍尔元件是 一种四端元件
5.1.1 霍尔传感器的工作原理
霍尔效演示
d
a b c 当磁场垂直于薄片时,电子受到洛仑兹力的 作用,向内侧偏移,在半导体薄片c、d方向的端 面之间建立起霍尔电势。
霍尔元件在工作时,在激励电流端通入电流I,并将薄片置于 磁场中。设该磁场垂直于薄片,磁感应强度为B,这时电子将受 到洛伦磁力FL的作用,向内侧偏移,该侧形成电子的堆积,从 而在薄片的c、d方向产生霍尔电动势。
汽车点火线圈 高压输出接 头
12V低压电源输入 接头
采用霍尔式无触 点电子点火装置能较 好地克服汽车合金触 点点火时间不准确、 触点易烧坏、高速时 动力不足等缺点。
霍尔式无触点汽车电子点火装置工作原 理
采用霍尔式无触点电子点火装置无磨损、点 火时间准确、高速时动力足。
桑塔纳汽车霍尔式分电器示意图
a)带缺口的触发器叶片 b)触发器叶片与永久磁铁及霍尔集成 电路之间的安装关系 c)叶片位置与点火正时的关系 1-触发器叶片 2-槽口 3-分电器转轴 4-永久磁铁 5-霍尔集成电路(PNP型霍尔IC)
5.1 霍尔传感器的应用
导入:直流电机以良好的起动性能、调速性能等优点著称,其模型如图 5-1 所示。有刷直流电机 换向器和电刷在直流电机中扮演着重要的角色,虽然它可以简化电机控制器的结构,但是有刷直 流电机在换向时易产生电火花,长期使用时容易造成换向器与电刷之间的磨损,增加了维护成本; 换向器和电刷之间容易受环境(如灰尘等)影响,降低工作的可靠性。采用霍尔位置传感器实现 用电子换向器取代机械换向器。
EH=KH IBcosq
结论:霍尔电势与输入电流I、磁感应强度B成正 比,且当B的方向改变时,霍尔电势的方向也随之改变。 如果所施加的磁场为交变磁场,则霍尔电势为同频率 的交变电势。
5.1.2 霍尔传感器的特性参数
(1)灵敏度KH。KH=EH /(IB),它的单位为mV(mA· T)。 (2)额定控制电流Icm。霍尔元件将因通过电流而发热。从而 引起霍尔电动势的温漂增大,霍尔元件因型号不同,规定相应 的额定电流数值从几毫安至几十毫安。 (3)最大磁感应强度BM。磁感应强度超过BM时,霍尔电动势 的非线性误差将明显增大,BM的数值一般小于零点几特斯拉 (1T=104GS)。
5.1.4 无刷直流电机电路 霍尔集成电路控制继电器的应用电路
线性型集成电路是将霍尔元件和恒流源、线性差 动放大器等做在一个芯片上,输出电压为伏级,比直 接使用霍尔元件方便得多。较典型的线性型霍尔器件 如UGN3501等。
线性型三端 霍尔集成电路
霍尔集成电路控制继电器的应用电路
无刷直流电机的转动原理
电动自行车的无刷电动机及控制电路
利用 PWM调 速
去速度 控制器
5.1.5 磁补偿式电流传感器——线性型霍尔集成电路
图5-10 磁补偿式电流传感器工作原理图
5.1.6 公共汽车关门指示电路
图5-11 公共汽车关门指示电路
5.1.7 金属计数器电路
图5-12 霍尔接近开关构成的金属计数器电路
霍尔式无触点汽车电子点火装置 5.1.8 霍尔式无触点汽车电子点火电路