基于Simulink进行系统仿真(微分方程、传递函数)
基于simulink汽车速度控制系统的设计与仿真
基于simulink汽车速度控制系统的设计与仿真摘要:目前许多汽车把汽车速度控制系统作为配属设备或选配设备。
汽车装有汽车速度控制系统后,当驾驶员启动这一装置并进行一些简单的设置后,该装置可自动保持某一恒定速度行驶,而不踩油门。
由于电子系统能准确地控制车辆的速度,从而使高速行驶的车辆更加安全、平稳。
在文中,首先对汽车的运动原理进行分析,建立控制系统简化模型,根据研究对象的物理特性建立起汽车速度控制控制系统的微分方程,再将该微分方程进行线性化处理,运用PID控制理论的方法对汽车速度控制控制系统进行分析和控制。
然后对汽车速度控制系统进行设计分析,在已有的模型下,对设计的汽车速度控制系统进行Matlab语言仿真。
关键词:速度控制系统PID控制仿真指导老师签名:Design and Simulation of the vehicle speedcontrol systemStudent name Class:Supervisor:Abstract:At present, many cars make car speed control system as an attachment device or optional equipment. The car is fitted with the motor speed control system, when the driver start the device and make some simple settings, the device can automatically maintain a constant speed, and do not step on the accelerator. Because the electronic system can accurately control the speed of the vehicle, so that the high-speed vehicles more secure, stable.In this paper, the first principle of the movement of automobile is analyzed, establishing control system is simplified model, based on physical characteristics of the research object to establish the vehicle speed control differential equation of the control system, then the differential equation is linearized by using the method of control theory, analyze and control the motor speed control system. Then the design of the vehicle speed control system, the existing model, to design vehicle speed control system simulation language Matlab.Keyword:Speed control system PID control simulationSignature of Supervisor:目录1绪论 (1)1.1选题的依据及课题意义 (1)1.2汽车速度控制研究概况及发展趋势 (1)2速度控制系统的简述 (3)2.1汽车速度控制系统原理 (3)2.2速度控制系统的分类 (3)2.3速度控制系统的基本用途 (4)2.4电子式多功能速度控制系统功能 (4)3系统模型建立及性能分析 (6)3.1汽车受力分析 (6)3.2行驶汽车仿真模型 (7)3.3 动态性能和稳态性能指标 (8)4 PID控制器 (10)4.1 PID控制简述 (10)4.2 PID控制规律 (10)4.3 PID作用分析 (14)5 系统仿真及结果分析 (15)5.1 SIMULINK简介 (15)5.2实验方案选择 (15)5.2.1采用P控制 (15)5.2.2采用PI控制 (20)5.2.3采用PID控制 (22)5.3实验结果分析 (25)总结 (26)参考文献 (27)致谢 (28)1绪论1.1选题的依据及课题意义随着汽车工业和公路运输业的发展,汽车将走进千家万户,驾驶人员非职业化的特点将突出,车辆驾驶的自动化己成为汽车发展的主要趋势。
基于Simulink的控制系统建模与仿真

第27页/共36页
滑艇速度控制系统模型框图
第28页/共36页
然后设置正确的系统模型参数与仿真参数对此 系统进行仿真,其中Step的Final Value值设置为1000 (即滑艇牵引力)、子系统中增益模块Gain的取值 为1/1000(即1/m)、Fcn模块的expression设置为 u^2-u(求取水的阻力)、系统仿真时间为0至100s。
0.02s。 (2)P、I、D增益模块:取值分别为1、0.01、0。
第15页/共36页
汽车动力机构参数:
(1)Gain模块:取值为1/m,即1/1000。 (2)Gain1模块:取值为b/m,即20/1000。 (3)Integrator模块:初始状态为0,即速度初值为0。 系统仿真参数:
(1)仿真时间范围:从0至1000s。 (2)求解器:使用变步长连续求解器。 4.系统仿真与分析
建模: 根据牛顿第二定律,小车受弹簧的弹性力、
阻尼器的阻尼力、加速度力,运动方程如下:
mx fx kx F x 0.2x 0.4x 0.2F u(t) 0.2F x u(t) 0.2x 0.4x
例exm1。
第1页/共36页
例2 蹦极跳系统 蹦极跳是一种挑战身体极限的运动,蹦极者系
着一根弹力绳从高处的桥梁或山崖等向下跳。在下 落的过程中,蹦极着几乎处于失重状态。应用 Simulink对蹦极跳系统进行仿真研究。
积分环节: x(n) x(n 1) u(n) 微分环节:d(n) u(n) u(n 1) 系统输出: y(n) Pu(n) Ix(n) Dd(n)
第10页/共36页
汽车动力机构 汽车动力机构是行驶控制系统的执行机构。其
基于Simulink状态空间建模的系统分析方法程序实现
基于Simulink状态空间建模的系统分析方法程序实现荆晓莉(陕西理工学院物电学院电子信息科学与技术1101班,陕西汉中723001)指导老师:龙姝明[摘要] 无论用何种方法求高阶连续系统解析解都是十分棘手的问题。
实际上,科学研究和工程应用中更多地需要系统的数值解。
调用Matlab的Simulink工具包,可以用模块图标方法来编程,并通过运行系统模型文件的方法直接给出连续系统的数值解,而不需要将连续系统转换为离散系统再求解。
对于复杂LTI 系统直接写出微分方程再给出状态空间矩阵很困难,我们获得系统状态空间矩阵的方法是:先将系统映射到s 域,列出解(系统输出)函数的像函数满足的代数方程组,解代数方程组给出系统函数H(s),再调用Matlab的函数[a,b,c,d]=tf2ss(num,den)就得到系统的状态空间矩阵,从而完成系统的描述,再创建系统模型文件,写入状态空间矩阵、输入信号、初值条件及运行相关参数,最后编程调用sim()函数运行模型文件给出连续系统的数值解。
[关键字]连续系统;离散化;Simulink;M文件The implementation of the system analysis method based on Simulink state space modelingJing Xiaoli(Grade11,Class1,Major Electronic Information Science and Technology Department of Physics,ShannxiUniversity of Technology,Hanzhong,723001)Tutor: Long ShumingAbstract It is a difficult problem for the higher order continuous system to solve the problem.In fact,the numerical solution of the system is more needed for scientific research and engineering application.Calling Matlab Simulink toolkit can be programmed by using the method of module icon,and the direct method of operation system model file are given continuous system of numerical solution, without the need to convert the continuous system to discrete system, to be solved. Continuous model, mapped to directly write for complex LTI system differential equations and give the state space matrix is very difficult,we obtain the system state space matrix method is: first the system's domain, a list of solutions (output) function as function satisfies the algebraic equation group, the solution of algebraic equations gives the system function H(s), and then call the Matlab function [A,B,C,D]=tf2ss(num,den) system state space matrix,thus completing the system description, and then create a system file, write the state space matrix, input signal, the initial conditions and operating parameters,programming at last call to sim run the model file is system of numerical solutions.Keywords Continuous system,Discrete,Simulink,M file目录1 状态空间分析方法的概述 (1)2 快速创建LTI连续系统状态空间模型的方法 (2)2.1 创建LTI连续系统传递函数的方法 (2)2.2 构造描述LTI连续系统的状态空间模型矩阵 (3)3 用Simulink状态空间建模求解LTI系统数值解的思路 (4)3.1 LTI连续系统的描述 (4)3.2 创建系统的Simulink状态空间模型 (4)3.3 模块内部参数设置及数据存储 (5)4 利用Simulink状态空间建模求解LTI系统的优缺点 (7)4.1 状态空间建模求解LTI系统的优点 (7)4.2 状态空间建模求解LTI系统的缺点 (7)5 连续系统Simulink状态空间建模分析方法程序设计的思路 (7)5.1 调用模型文件及编程求解系统响应 (7)5.2 分析系统的频谱与相位 (9)6 状态空间分析方法的应用实例 (9)6.1 实际连续系统的描述 (9)6.2 在程序中设置参数 (10)6.3 运行程序,求解系统 (10)结语 (11)附录 (13)最近几年科学不断发展,系统的结构也渐渐复杂。
基于Matlab_Simulink数控伺服系统的建模仿真
文章编号:1001-2265(2006)08-0067-03收稿日期:2006-02-27 3基金项目:广东省自然科学基金资助项目(32364);广东省高教厅基金资助项目(Z02067)作者简介:王小东(1981—),男,内蒙古赤峰人,五邑大学机电工程系硕士研究生,研究方向为数控系统及其仿真,(E -mail )wangxiaodong1816@ 。
基于Matlab /Si m ulink 数控伺服系统的建模仿真3王小东,王大承(五邑大学机电工程系,广东 江门 529020)摘要:利用M atlab /Si m ulink 软件,通过对永磁同步电机(P M S M )本体、d /q 坐标系向a /b /c 坐标系转换、三相电流源逆变器等功能模块建立与组合,构建了永磁同步电机控制系统的速度和电流双闭环仿真模型。
根据数控伺服系统的性能要求,进行参数选择及仿真。
仿真结果证明了该系统模型的有效性,为数控伺服控制系统的设计和调试提供了理论基础。
关键词:M atlab /Si m ulink;数控伺服系统;永磁同步电机;仿真中图分类号:TP273 文献标识码:AS i m ul a ti on and M odeli n g of P M S M Ba sed on M a tl abWANG Xiao 2dong,WANG Da 2cheng(Depart m ent of Mechanical and Electrical Engineering,W uyi University,J iang men Guangdong 529020,China )Abstract:I n Matlab /Si m ulink,the bl ocks,such as P MS M bl ock,coordinate transfor mati on f or med q /d t o a /b /c bl ock,three phase current s ource inveter contr oller bl ock,etc .have been modeled .By the organic combi 2nati on of these bl ocks,t w o contr ol l oop s are used .The para meters are chosed by the perf or mance of servo sys 2te m.The reas onability and validity have been testified by si m ulate result and this novel method offers a ne w thought for designing and debugging actual mot or .Key words:Matlab /Si m ulink,NC servo syste m;P MS M ,si m ulati on0 引言数控机床的伺服系统一般由电流环和速度环组成[1]。
simulink建模与仿真
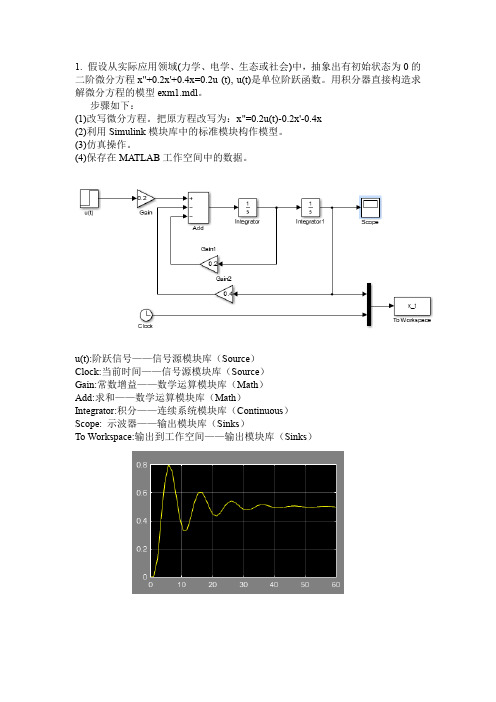
1. 假设从实际应用领域(力学、电学、生态或社会)中,抽象出有初始状态为0的二阶微分方程x"+0.2x'+0.4x=0.2u (t), u(t)是单位阶跃函数。
用积分器直接构造求解微分方程的模型exm1.mdl。
步骤如下:(1)改写微分方程。
把原方程改写为:x"=0.2u(t)-0.2x'-0.4x(2)利用Simulink模块库中的标准模块构作模型。
(3)仿真操作。
(4)保存在MATLAB工作空间中的数据。
u(t):阶跃信号——信号源模块库(Source)Clock:当前时间——信号源模块库(Source)Gain:常数增益——数学运算模块库(Math)Add:求和——数学运算模块库(Math)Integrator:积分——连续系统模块库(Continuous)Scope:示波器——输出模块库(Sinks)To Workspace:输出到工作空间——输出模块库(Sinks)2. 建立二阶系统222)(n n nS S S G ωςωω++=的脉冲响应模型,设ωn=10Hz ,观察当0<ζ<1、ζ=0、ζ=1及ζ>1时系统的响应。
Pulse Generator :脉冲发生器——信号源模块库(Source )Transfer Fun :传递函数——连续系统模块库(Continuous )Scope :示波器——输出模块库(Sinks )ζ=0.2 ζ=0ζ=1 ζ=53.皮球以15米/秒的速度从10米高的地方落下,建立显示球弹跳轨迹的模型。
Gravity:常数——信号源模块库(Source)IC Elasticity:信号的初始值——信号与系统模块库(Signal&Systems)Gain:常数增益——数学运算模块库(Math)Velocity:积分——连续系统模块库(Continuous)Position:有上下边界的有限积分——连续系统模块库(Continuous)Scope:示波器——输出模块库(Sinks)4. 利用使能原理构成一个正弦半波整流器。
第五讲 基于MATLAB-Simulink的建模与仿真
MATLAB软件简介?
MATLAB软件的典型应用领域:
❖科学研究; ❖工程技术应用研究 ❖CAI(Computer Aided Instruct) ❖数学实验(Mathematical Experiment) ❖数学建模(Mathematical Modeling)
模型 Transfer-Fcn:线性传递函数模型 Zero-Pole:以零极点表示的传递
函数模型 Memory:存储上一时刻的状态值 Transport Delay:输入信号延时 一个给定时间再输出 Variable Transport Delay:输入 信号延时一个可变时间再输出
✓ 离散模块(Discrete)
For循环不能用For循环内重新赋值循环变
量n来终止。
在For循环中循环控制量的范围可以是任
何有效的MATLAB矩阵。比如
data=[11 9 45 6; 7 16 -1 5];
for n=data
x=n(1)-n(2)
end 这时程序的输出有四个数值,分别是矩阵
data的两列相减的结果
x = 4 x = -7
x = 46 x = 1
For循环可按需要嵌套,即For循环体内的命 令组中可以出现另一个For循环体,这体现了 For循环体也是命令组。比如 for n=1:5
for m=5:-1:1
A(n,m)=n^2+m^2; End
end
MATLAB软件简介?
While-end循环以不定的次数求一组语句的值。 Whil-end 循环的一般形式是: while expression(控制表达式) {commands} end 只要在控制表达式(expression)里的所有元 素为真,就执行While和end语句之间的命令 串({commands})。
SIMULINK_的仿真算法
SIMULINK的仿真算法在SIMULINK的仿真过程中选择合适的算法是很重要的,仿真算法是求常微分方程、传递函数、状态方程解的数值计算方法,这些方法主要有欧拉法(Euler)、阿达姆斯法(Adams)、龙格·库塔法(Rung-Kutta),这些算法都主要建立在泰勒级数的基础上。
欧拉法是最早出现的一种数值计算方法,它是数值计算的基础,它用矩形面积来近似积分计算,欧拉法比较简单,但精度不高,现在已经较少使用。
阿达姆斯法是欧拉法的改进,它用梯形面积近似积分计算,所以也称梯形法,梯形法计算每步都需要经过多次迭代,计算量较大,采用预报-校正后只要迭代一次,计算量减少,但是计算时要用其他算法计算开始的几步。
龙格-库塔法是间接使用泰勒级数展开式的方法,它在积分区间内多预报几个点的斜率,然后进行加权平均,用作计算下一点的依据,从而构造了精度更高的数值积分计算方法。
如果取两个点的斜率就是二阶龙格-库塔法,取四个点的斜率就是四阶龙格-库塔法。
SIMULINK汇集了各种求解常微分方程数值解的方法,这些方法分为两大类,可变步长类算法和固定步长类算法。
7.1可变步长类算法可变步长(Variable-step)类算法是在解算模型(方程)时可以自动调整步长,并通过减小步长来提高计算的精度。
在SIMULINK的算法中可变步长类算法有如下几种:1.Ode45(Dormand-Prince)基于显式Rung-Kutla(4,5)和Dormand-Prince组合的算法,它是一种一步解法,即只要知道前一时间点的解y(tn-1),就可以立即计算当前时间点的方程解y(tn)。
对大多数仿真模型来说,首先使用ode45来解算模型是最佳的选择,所以在SIMULINK的算法选择中将ode45设为默认的算法。
2.ode23(Bogacki-Shampine)基于显式Rung-Kutta(2,3)、Bogacki和Shampine相结合的算法,它也是一种一步算法。
Simulink系统仿真原理
仿真效率取决于计算机性能、模型复杂度和数值算法的优化程度。
03
Simulink模型建立
模型元素
模块
Simulink中的模块是构成模型的基本单元, 每个模块代表一个特定的功能或算法。
连接线
连接线用于将不同模块连接起来,表示数据 流或信号流。
参数设置
每个模块都有一些参数可以设置,用于调整 模块的行为或功能。
性能评估
根据仿真结果,评估系统性能指标,如响应时间、超调量、稳态误 差等。
优化设计
基于仿真结果,对系统参数和结构进行优化设计,提高系统性能和 稳定性。
05
模型优化与改进
参数优化
参数优化
在Simulink模型中,参数的选择和调整对仿真结果的影响非常大。通过调整模型中的 参数,可以优化模型的性能,提高仿真的准确性和效率。
通过点击Simulink界面上的“开 始”按钮或使用命令行指令来启 动仿真。
实时监测
02
03
结果导出
在仿真过程中,可以通过 Simulink界面实时监测系统状态、 变量值和输出结果等。
将仿真结果导出为文本、图像或 数据文件,以便进一步分析或与 其他软件进行交互。
模型性能分析
稳定性分析
通过分析仿真结果,判断系统是否稳定,并找出可能的不稳定因素。
特点
支持图形化建模、交互式仿真、动态 系统分析等,适用于多种领域的系统 建模与仿真。
Simulink的历史与发展
1980年代初
由美国MathWorks公司推出Simulink的早期版 本。
1990年代
随着计算机技术的进步,Simulink的功能不断 扩展,支持更多的系统和算法。
2000年代至今
MATLABSimulink与控制系统仿真实验报告
MATLAB/Simulink 与控制系统仿真实验报告姓名:喻彬彬学号:K031541725实验1、MATLAB/Simulink 仿真基础及控制系统模型的建立一、实验目的1、掌握MATLAB/Simulink 仿真的基本知识;2、熟练应用MATLAB 软件建立控制系统模型。
二、实验设备电脑一台;MATLAB 仿真软件一个三、实验内容1、熟悉MATLAB/Smulink 仿真软件。
2、一个单位负反馈二阶系统,其开环传递函数为210()3G s s s =+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
3、某控制系统的传递函数为()()()1()Y s G s X s G s =+,其中250()23s G s s s+=+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
4、一闭环系统结构如图所示,其中系统前向通道的传递函数为320.520()0.11220s G s s s s s+=+++g ,而且前向通道有一个[-0.2,0.5]的限幅环节,图中用N 表示,反馈通道的增益为1.5,系统为负反馈,阶跃输入经1.5倍的增益作用到系统。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
四、实验报告要求实验报告撰写应包括实验名称、实验内容、实验要求、实验步骤、实验结果及分析和实验体会。
五、实验思考题总结仿真模型构建及调试过程中的心得体会。
题1、(1)利用Simulink的Library窗口中的【File】→【New】,打开一个新的模型窗口。
(2)分别从信号源库(Sourse)、输出方式库(Sink)、数学运算库(Math)、连续系统库(Continuous)中,用鼠标把阶跃信号发生器(Step)、示波器(Scope)、传递函数(Transfern Fcn)和相加器(Sum)4个标准功能模块选中,并将其拖至模型窗口。
Simulink仿真实例
2014年4月19日星期六
基于MATLAB/SIMULINK的系统建模与 bx 0 M x
构建的模型为
2014年4月19日星期六
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
因有阻尼器存在,故箱子最终会停止运 动。
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
其运动方程式为
M f bx x
拉力作用时间为2s,建构的模型为
2014年4月19日星期六
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
因有摩擦力存在,箱子最终将会停止前 进。
2014年4月19日星期六 基于MATLAB/SIMULINK的系统建模与仿真
2014年4月19日星期六
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
仿真过程中,设绳索长度-30m,起始速 度为0;物体质量为90kg,g为9.8m/s2,弹性 系数k为20,a1和a2均为1.
2014年4月19日星期六
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
仿真曲线为
2014年4月19日星期六
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
假设未伸长时绳索的端部距地面为50m, 为了得到更真实的曲线,将50减去输出位置
2014年4月19日星期六
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2014年4月19日星期六
基于MATLAB/SIMULINK的系统建模与仿真
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验四 基于Simulink 进行系统仿真(微
分方程、传递函数)
一.实验目的
1) 熟悉Simulink 的工作环境;
2) 掌握Simulink 数学工具箱的使用;
3) 掌握在Simulink 的工作环境中建立系统仿真模型。
二.实验内容
系统微分方程:)(10)(10)
(10)
(83322t u t y dt t dy dt t y d =++
系统传递函数:8328
101010)()()(++==s s s U s Y s G
1)(=t u ,)314sin()(t t u =,)90314sin()(o t t u +=
模型
微分方程时的过程
Ut=1时
t
u 时)(t
314
)
sin(
t
t
u+
=时
)(o
)
sin(
90
314
传递函数时的过程
u时
t
)(=
1
t
u=时
)(t
sin(
314
)
t
t
)(o
=时
u+
)
sin(
90
314
结论及感想
从两种种不同方法的仿真结果,我们可以看出分别用微分方程和传递函数在Simulink中,仿真出来的结果没有很明显的区别,说明两种方法的精度都差不多。
但是,不同的电压源得出的仿真结果不一样,阶跃电源开始时震荡,后来幅度逐渐变小,趋近于1;正弦电源,初相不同时,初始时刻的结果也不相同,有初相时开始震荡会更剧烈,但最后都会变为稳态值,即为正弦值。
通过本次实验,我认识到了建模与仿真的一般性方法,收获甚多,也更进一步了解了
Matlab,Matlab不仅仅在平时的编程方面功能强大,在仿真方面也熠熠生辉。