基于模糊PI控制的无刷直流电机控制系统_傅涛
基于模糊优化的PID直流无刷电机控制
基于模糊优化的PID直流无刷电机控制摘要:PID直流无刷电机与其他电机不同,具备小体积、高效率、性能佳、结构简易等特性,在汽车、航天、机械等领域较为常规件,为发挥其作用价值,应以模糊优化为基础对其进行控制。
本文在综述无刷直流电机和模糊优化的基础上,继而直接提出基于模糊优化,PID直流无刷电机的仿真设计,最后指明几点控制策略,以供参考。
关键词:模糊优化;PID直流无刷电机;控制要点引言:随着电子电气技术的不断发展和稀土等永磁材料的广泛应用,无刷直流电机控制已成为近年来的研究热点之一。
无刷直流电机是一个非线性、多变量、强耦合的系统。
传统PID控制策略的参数不能根据不同的电机环境而改变,这使得PID控制器不能提供良好的控制性能。
PID控制器的性能完全取决于对其增益参数的调节,随时代发展,人们提出运用人工智能控制PID控制器。
模糊PID控制是模糊控制和PID控制的有效结合。
PID控制参数可在线设置,提高控制精度,达到更好的控制效果。
一、直流无刷电机与模糊优化的概述(1)无刷直流电机具有体积小、转矩大、效率高、节能环保、使用寿命长等优点,广泛应用于工业设备、医疗设备和新型工业设备。
无刷直流电机的速度控制系统通常采用传统的PID控制,传统的PID控制器对参数非常敏感。
只有当控制器参数适合受控系统时,才能实现最佳性能。
无刷直流电机是一个多变量非线性系统。
如果系统状态发生变化,传统PID调速系统中的PID设置也会发生变化。
因此,传统PID控制器动态性能差,可能导致电机速度响应慢,控制精度低,难以保证良好的调速效果。
(2)模糊控制的概念最早由L.A提出,国际合作良好。
该算法是一种基于模糊集理论、模糊语言变量理论和模糊逻辑思想的智能控制算法。
模糊控制不需要精确的数学模型,可以方便有效地解决系统的非线性问题,从而提高控制系统的稳定性和灵活性,具有良好的控制效果。
基于无刷直流电机控制系统,提出一种在MATLAB-Simulink环境下的模糊PID控制方案,以替代传统的PID控制器[1]。
模糊PID控制在直流无刷电机控制系统中的应用
模糊PID控制在直流无刷电机控制系统中的应用管于球(中南大学信息科学与工程学院控制工程系,长沙410075)摘要:本文根据直流无刷电机控制系统是多变量、时变和非线性等的复杂系统的特点以及简单PID控制性能的缺点,提出了改进方案,电机控制系统的速度环采用参数自整定模糊PID控制,建立了仿真模型。
将该控制方案的仿真结果与简单PID 控制的仿真结果相比较可得,模糊PID控制在抗负载扰动能力和启动转速超调方面具有明显的优越性,有效地满足了用户对直流无刷电机控制系统高性能的要求。
关键词:直流无刷电机,矢量控制,空间矢量脉宽调制,PID控制,模糊控制中图分类号:TK52 文献标识码:AAbstract: For not only the problem that the brushless direct current motor control system is a complex system with multi-variable, time-variability and non-linear, but also the shortcomings of simple PID control performance, the essay proposes an improved program. Parameter self-tuning fuzzy-PID control method is used for the speed loop of the motor control system, and the results are researched and analyzed deeply. Compared with the simulation result of this control program and that of simple PID, Parameter self-tuning fuzzy-PID control has strong ability of anti-load disturbance and provides small location overshoot, basically satisfying the high performance requirement of brushless direct current motor.KEY WORDS:BLDCM, vector control, SVPWM, PID control, fuzzy-control1 引言随着经济的快速发展,人们对汽车的需求不断增加,但是由于能源和环境问题,从而赋予电动汽车广阔的发展空间。
基于自适应模糊PID控制的无刷直流电机调速系统

基于自适应模糊PID控制的无刷直流电机调速系统作者:杜娟郭中华马华杰来源:《电子技术与软件工程》2016年第03期摘要对无刷直流电机的控制技术与调速方法进行了研究,在Matlab7.0/Simulink窗口下,构建了永磁无刷直流电机调速系统仿真模型,设计了自适应模糊PID控制器,对电机的低、中、高速运行状况予以研究,并与常规PID控制器开展对比研究。
结果表明:本文所设计的自适应模糊控制系统,不论是动态、还是静态性能,对比常规控制器更加优越,在负载扰动、系统参数的变动等方面,该系统的适应能力较强,控制效果较好。
【关键词】永磁无刷直流电机自适应模糊PID控制器脉冲宽度调制伴随着性能更高的永磁材料、电力技术的飞速发展,由此出现了一种新型电机,即永磁无刷直流电机。
它既具有直流电机良好的机械特性和调速性能,又具有交流电机结构简单、运行可靠、维护方便、寿命长等特点,并且体积小、速度快、可靠性好。
但是,永磁无刷直流电机调速系统是一个非线性、多变量、时变系统。
采用传统的PID控制方法控制,要想达到良好的控制效果比较困难,和预期效果有一定的差距。
本文以对自适应模糊PID控制器的设计为基础,结合模糊算法对PID参数进行自动整定的方法,将传统PID和模糊控制相结合,应用于无刷直流电动机调速控制系,实现针对该电机的高精度、实时控制目标。
1 无刷直流电机数学模型选取三相永磁无刷直流电机作为具体案例,实现相关动态数学模型的构建。
为了便于探究,假设如下:电机连接为定子绕组星型,且完全对称,空间上互差120度电角度;忽略电枢反应,气隙磁场近似为梯形波;换相、齿槽效应等影响不予考虑,电枢表面导体的分布为均匀且连续;其中的磁路饱和、相关损耗等都不予考虑;参数保持不变;转速、运行相对稳定。
1.1 电压方程将无刷直流电动机每相绕组等效为电阻、电感和反电动势串联。
对于方波电动机,在转子位置变化的同时,其磁阻并不会出现变化,所以不论为互感还是自感,都是常数;如果此时连接为三相星型,且导通方式为120°,中线也不存在,那么在三相对称电机中各相电流代数总和为零,即:(1)定子三相绕组电压方程:(2)上述公式内:定子相绕组电压、电流、反电动势分别为ua、ub、uc;ia、ib、ic以及ea、eb、ec;每相绕组的自感、内阻以及互感分别为L、r以及M。
模糊自适应PID控制器在无刷直流电机控制系统中的应用
模糊自适应PID控制器在无刷直流电机控制系统中的应用孙佃升1白连平2(1.滨州学院自动化系,滨州,256601)(2.北京机械工业学院自动化系北京 100085)摘要:无刷直流电机是一种多变量、非线性的控制系统,采用经典的PID控制难以达到满意的控制效果。
本文将模糊自适应PID控制器应用于无刷直流电机的控制中,运用模糊控制原理对PID参数进行在线调整。
实验结果表明,较之传统的PID控制,采用模糊自适应PID控制的无刷直流电机控制系统具有更好的动态和静态性能,达到了较好的控制效果。
关键词:无刷直流电机;模糊PID;自适应控制;参数自整定The Application of Fuzzy Adaptive PID Controllerfor Control System of BLDCMSUN Dian-sheng 1BAI Lian-ping 2(1.Department of Automatization, Binzhou College, Binzhou,256600,China)(2.Department of Automatization, Beijing Information Science&Technology University,Beijing,100085,China)ABSTRACT: As brushless DC motor (BLDCM) is a multi-variable and non-linear system, using conventional PID control can not obtaion satisfied control effect. This paper introduce the application of fuzzy adaptive PID controller for control system of BLDCM and parameters self-tuning online by employing Fuzzy control principle. The experiments illustrate that excellent static and dynamic performance compared with the conventional PID control.KEY WORDS: Brushless DC Motor(BLDCM); Fuzzy PLD; adaptive control; parameter self-tuning1 引言无刷直流电机既有优良的调速性能,又克服了有刷直流电机机械换向带来的诸多问题,在各个领域获得了广泛的应用。
基于模糊PI参数自整定的无刷直流电机控制
各 相 自感 为 , 感 为 , 相相 电压 分 别 为 “ 、 、 互 三 u , 电流分 别 为 、 , 相 绕 组 反 电动 势 分 别 为 e 、 相 、 三 e、 , e 中性 点 电压 为 。以 三相 电流为 状态 变 量 , 可写 出 三 相 电压 的平 衡方程 式 :
难 以达 到预期效 果 。 模糊 控制是 智 能 控制 中最 常 用 的方 法 之 一 ,它 不要
图1 永磁 无 刷 直 流 电机 控 制 系统
求获 得系 统精 确 数 学 模 型 , 有 速度 快 和鲁 棒 性 强 的特 具
点 。本文通 过建立 无刷 直流 电机 的数 学模 型 , 将模 糊 控制
b naat e uz I ot l r h hajs teP prm t s cod gt bt t r r n evr t rt o tee o,h ytm ya d p v zy n ol i duth I aa e r acri o eer dt aiy a fh r r tess i f P c r ew c e n o hh oa h e e r e
摘要: 文通过建立无刷直流电机的数学模 型, 本 构造 了无刷 直流电机控 制仿真模块 。同时将模糊 P 参数 自整定控 制器 引 I
入无刷直流电机控制 系统 中, 根据 系统输 出误差和误差 变化率 实时整定 P 参数 , I 仿真结果表明 , 系统的动态和静 态性 能优
越。
关 键 词 : 刷 直 流 电机 无
调速 系统优 劣的指标 包括 快速性 、 定性 、 棒性 , 稳 鲁 这些 指
标的 实现都依 赖 于其 控 制系统 。传 统 的 P 控 制方便 简 单 l 精确 , 但需 首先 获得 系统 的 精确 数 学模 型 , 于 无刷 直 流 鉴 电机是 一个多 变量 、 强耦 合 、 非线 性 、 时变 的复 杂系 统 , 其 数 值计算 和特性 表现 要 比直流 电机复杂 许多 ,I P 控制往 往
基于模糊PID算法的直流电机控制系统研究
基于模糊PID算法的直流电机控制系统研究作者:何宝泉刘涛来源:《科技资讯》2014年第19期摘要:直流电机控制系统存在多变量,非线性,强耦合等特点。
传统的PID控制存在其参数难以确定及PID参数对电机参数变化适应能力差等缺点。
为克服上述缺点,本文根据模糊控制理论设计了基于模糊PID算法的直流电机双闭环调速控制系统;利用MATLAB软件对基于模糊PID控制的直流调速系统性能进行了仿真研究,并和传统PID控制系统进行了比较。
仿真结果表明,和传统PID控制比较,模糊控制系统超调量小、抗扰动能力强、鲁棒性更高,更具适应性,控制性能优越。
关键词:模糊控制直流电机 MATLAB中图分类号:TP273 文献标识码:A 文章编号:1672-3791(2014)07(a)-0109-04直流电动机具有起动转矩大、控制性能较优等特点,在几点产品中应用广泛[1,2]。
目前直流电机多采用传统的PID控制,PID控制是最早发展起来的控制策略之一,由于其具有算法简单、鲁棒性好和可靠性高等优点,被广泛应用于工业过程控制中[3]。
但PID控制适合于可建立精确数学模型的确定性控制系统,但实际的工业过程控制系统中存在很多非线性或时变的不确定因素,使得PID控制器的参数整定过程十分繁琐,控制效果也往往因此而受影响。
近些年来,随着现代控制理论、智能控制和计算机技术的飞速发展,出现了很多新型的控制系统,模糊控制就是其中之一[4,5]。
模糊控制器不需要掌握控制对象的精确数学模型,而是根据人工控制规则组织控制决策表,再由控制规则表决定控制量的大小[6,7]。
这种控制方法对于存在滞后或随机干扰、参数未知等系统具有良好的控制效果[8~10]。
本文将模糊控制应用到直流电动机调速系统中,并通过MATLAB仿真,对基于模糊PID 和传统PID的控制系统作了对比分析研究。
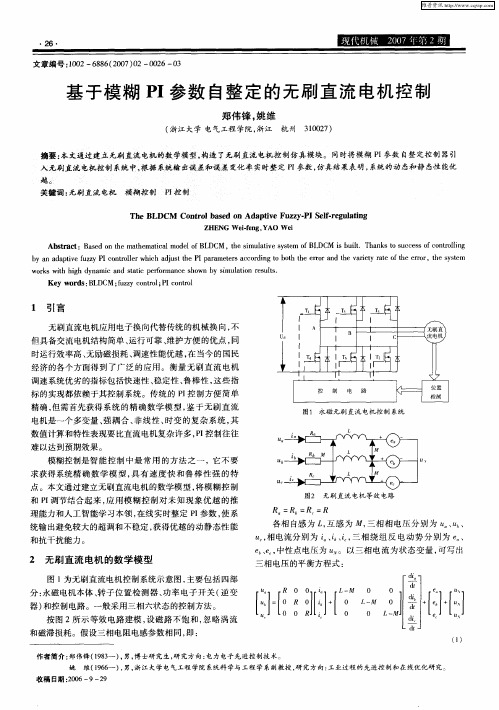
1 控制系统模型1.1 系统结构基于模糊PID的直流电机双环控制系统结构如(图1)所示,主要由模糊控制器、电流PI 控制器、驱动电路、直流电动机及转速、电流反馈装置构成。
基于模糊PI控制的无刷直流电机调速系统

基于模糊PI控制的无刷直流电机调速系统
王霞;朱景伟
【期刊名称】《电气传动》
【年(卷),期】2014(044)001
【摘要】传统无刷直流电机调速系统中的PI调节器要求对控制器参数进行严格整定,但当系统参数变化时,PI控制器的参数不能随之调整.针对这个问题,提出一种可以自整定参数的模糊PI控制方法,详细讨论了无刷直流电机的模糊PI控制原理,并设计了以dsPIC30F4011为核心的无刷直流电动机模糊PI转速控制系统.实验结果表明,基于dsPIC30F4011的无刷直流电动机模糊PI控制系统能实现平滑连续调速.【总页数】5页(P63-67)
【作者】王霞;朱景伟
【作者单位】大连海事大学轮机工程学院,辽宁大连116026;大连海事大学轮机工程学院,辽宁大连116026
【正文语种】中文
【中图分类】TM306
【相关文献】
1.基于模糊PI控制的无刷直流电机转速阶跃响应 [J], 张亚楠;徐向波;张俊梅
2.基于改进模糊PI控制的无位置传感器无刷直流电机调速研究 [J], 付光杰;赵子明
3.基于DSP2812的无刷直流电机模糊PI控制 [J], 裴家祥;刘兴奎
4.基于模糊PI控制的无刷直流电机调速系统仿真 [J], 王凌;刘卫国
5.基于带重叠换相的模糊PI控制系统对无刷直流电机转矩脉动的影响 [J], 温嘉斌;孙祖光;汪奇;杨斌
因版权原因,仅展示原文概要,查看原文内容请购买。
基于模糊自适应PI控制的无刷直流电机无级调速系统

基于模糊自适应PI控制的无刷直流电机无级调速系统李聪;尹文庆;冯学斌;张祎【摘要】针对传统PID控制策略对电机转速控制响应速度慢、控制精度低,以及电机调速系统负载或参数变化时很难达到预期效果等问题,提出了新型模糊自适应PI 控制策略,并对该策略在无刷直流电机调速系统中的应用进行了仿真研究;以TI公司的TMS320F2812为主控芯片,IR2136为驱动芯片搭建了无刷直流电机无级调速系统的硬件平台.试验分析结果表明,模糊自适应PI控制策略能加快电机调速系统的响应速度,具有稳定性好、精度高、鲁棒性强等优点,并得到了良好的控制效果,具有较高的应用价值.%In order to solve the problems of slow response, low control precision of the motor speed control, and traditional PID control strategy is difficult to achieve the expected effect when load or parameters of the motor speed system change, a new fuzzy adaptive PI control strategy was investigated, also, the simulation was studied to this strategy in the applications of brushless DC motor speed control system. The TI company s TMS320F2812 was considered as the main control chip, and the IR2136 was taken as the drive chip to design the hardware platform on stepless speed regulation system of brushless DC motor. The experimental results show that the fuzzy adaptive PI control strategy can speed up the response speed of motor speed control system, and it has good stability , high precision, and strong robustness, so it gets a good control effect, has a high application value.【期刊名称】《机电工程》【年(卷),期】2012(029)001【总页数】5页(P49-52,73)【关键词】无刷直流电机;模糊自适应PI控制;数字信号处理器;无级调速系统【作者】李聪;尹文庆;冯学斌;张祎【作者单位】南京农业大学工学院,江苏南京210031;南京农业大学工学院,江苏南京210031;南京农业大学工学院,江苏南京210031;南京农业大学工学院,江苏南京210031【正文语种】中文【中图分类】TH39;TH33;TP272无刷直流电机是随着电机技术的迅速发展而发展起来的新型直流电机,已经在机器人、电动车辆、医疗设备等很多领域取得了广泛的应用[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
参考文献: [1] 怯肇乾. 500kV 变电站站用电系统配置技术规范 [M].北京: 中国电力出版社.2009.09. [2] 段军.浅谈 500kV 变电站继电保护标准化设计在运行实践 中的应用. [J].《中国电力教育》2010(20).21- 23. [3] 贾莜.基于 IEC61850 规约的 500kV 变电站继电保护与故 障信息处理系 [J].《电力信息化》.2010 (5),59- 65. [4] 魏明 任化芝 500kV 变电站继电保护典型配置分析 [J].《贵 州电力信息》.2009(9),70- 77.
【关键词】无刷直流电机;模糊 PI;数字信号处理器
引言
无刷直流电机具有类似直流电机良好的调速、控制和运行特
性,并具有效率高、功率密度高、免维护、可高速运行等许多优点,在
许多场合得到了广泛的应用。
采用传统 PI 控制方式,始终糊控制理论和 PI 控制进行联
图 1 无刷直流电机控制系统框图
3.3 系统软件设计 本控制系统软件采用模块化设计,使软件组织灵活有序。首先 初始化 DSP,定义并初始化变量,开启捕获定时器周期中断、CAN 通信中断和外部保护中断。初始化完成之后,主程序就进入了等待 死循环,等待中断产生,执行中断服务子程序。 4. 实验结果 对无刷直流电机控制系统进行了实验,所应用的 BLDCM 的参 数为:额定电压为 160 V;额定转速为 6000 r/min;转动惯量为 0.02kg·m2;极对数为 2 对;定子电阻为 2.6 欧姆;定子电感为 16.22 mH。 进行实验时,通过 CAN 通讯每 10ms 发送一次给定速度给调速 系统,给调速系统发送了一系列的给定速度。实验结果如图 2- 3 所 示。图 2 是无刷直流电机的启动过程,图 3 是无刷直流电机的加减 速过程。速度的单位为 r/min,电流的单位为 mA,时间单位为 10ms。 从图中可以看出,可以看出速度跟踪响应快速且平稳,跟踪效果较 好。 结论 本文在传统 PI 控制方法的基础之上,采用了模糊控制。根据电 机转速和转速变化趋势,对 PI 参数进行在线调整,取得了高精度 的转速控制。实验结果表明,本系统能够提高无刷直流电机调速系
(上接第 231 页)
第二层的灌注,直至灰浆从出口溢出为止,并确保所注入灌浆料溢 出浇注口;
2.11 对于水泥垫块的最初护养而言,这三天内其温度以及模板 温度必须保持在 10- 35℃间。至于浇注口及溢出口上暴露在空气中 的灰浆应采用薄塑料板或者锅锡板进行隔离;
2.12 基架的拆除,根据最初养护的有关要求,灌浆后第三天应 将基架地脚螺栓螺母松开,并将基架吊开;
合运用[1-4]。本文在此基础之上,应用模糊 PI 控制设计调节器, 运用
模糊数学的基本理论和方法,控制系统根据控制对象的实际响应情
况运用模糊推理,自动实现对 PI 参数的最佳调整,提高控制系统对
速度变化的自适应能力。
1. 无刷直流电机的数学模型
为了简化模型的建立和分析,现做如下一些假设:①忽略磁路
作者简介: 杜巍,出生年月:1983 年 4 月;2004 年毕业于东北电力学院;现 就职于东莞供电局,主研方向:电气工程及其自动化。
允许水平偏差在 0.02mm 内,且水平偏差累计值在 0.13mm 内。 结论 实践发现,此汽轮机在某电厂长期运行过程中具有良好的稳定
性,机组的各项指标均达到了优良标准,这表明此安装工艺具有良 好的稳定性,具有一定的推广及应用价值。 电
● 参考文献:
[1] 朱瑞斌.柳州电厂 2×200MW 汽轮发电机组安装中无垫铁 施工新工艺的应用[J]. 广西电力建设科技信息, 1996, (1): 30- 34.
[2] 褚振辉.中小型汽轮发电机组安装技术[J]. 化工建设工程, 2003, 25(6): 25- 26.
[3] 石天祺. 浅谈东芝 600MW 汽轮发电机组无垫铁安装工艺要 点[J]. 西北电建, 2010, (1): 26- 30.
2.13 对已硬化的水泥垫块进行养护,基架拆除后应立即采用湿 布包裹灰浆垫块,而后采用刷子在垫块各侧面漆上养护混合物,应 将溢出的灰浆进行清除。接着采用喷洒水方式确保水泥垫块及混凝 土基础的湿润性,并采用湿布将水泥垫块湿布进行包裹。
2.14 对水泥垫块同基架间的间隙进行检查,可借助红丹接触情 况实现。将基架底面涂好红丹,并就位在水泥垫块上,在允许移动范 围进行移动,以检查底面同水泥垫块之间的接触状况。
b) 隶属函数选择三角形隶属函数。 c) 模糊控制器的设计核心是模糊控制规则。经过大量电机控制 实验经验的积累,得到了模糊控制规则表。 3. 控制方案 3.1 整体方案 系统整体控制设计为转速、电流双闭环的调速系统。本系统设 置了两个调节器,分别调节转速和电流,两者之间实行串联。把转速 调节器的输出作为电流调节器的输入,速度环作为外环,直接决定 伺服控制系统的动、静态性能,也是控制器设计中最关键的部分之 一。因此采用了模糊 PI 控制器,以提高系统的响应速度。 3.2 系统硬件设计 设计了基于 DSP 芯片的无刷直流电机控制系统硬件,如图 1 所示。硬件采用 TMS320F2407 作为控制器,用于处理采集到的数据 和发送控制命令,利用转子霍尔的时间间隔,计算出电机的运行速 度。控制系统根据不同的霍尔位置,改变 PWM 信号的数值和驱动 功率管的导通顺序,实现对电机转速和转动方向的控制。
ea R 0 0 ia L M M ia
Ub = eb + 0 R 0 ib + M L M p ib
(1)
Uc
ec 0 0 R ic M M L ic
式中,Ua、Ub、Uc 为定子绕组相电压;ia、ib、ic 为定子绕组相电流;
ea、eb、ec 为定子绕组相电动势;L 为每相绕组自感;M 为每相绕组间
的互感;p 为微分算子,p=d/dt。
电磁转矩:
T= eaia+ebib+ecic ω
(2)
电机运动方程:
J dω dt
=Te-TL-Bω
(3)
式中,Te 为电磁转矩;TL 负载转矩;B 为阻尼系数;ω 为电机机 械转速,J 为电机转动惯量。
2. 模糊 P I 控制策略
2.1 模糊控制系统原理
模糊控制是近代控制理论中建立在模糊集合论基础上的一种
饱和,不计涡流和磁滞损耗;②忽略齿槽效应,绕组均匀分布于光滑
定子的内表面;③不考虑电枢反应,气隙磁场分布近似梯形波,平顶
宽度近似 120 电角度;④转子上没有阻尼绕组,永磁体不起阻尼作
用;⑤电机三相绕组对称,忽略转子磁阻,三相定子绕组自感和互感
相等。得到如下方程:
[ ] [ ] [ ][ ] [ ] [ ] Ua
2.15 基架水平的调整,待接触面积满足要求规定后,应采用螺 栓将基架进行固定,并通过合像水平仪对基架水平进行调整,要求
(上接第 230 页)
统的响应速度,提高控制系统的鲁棒性,取得较为满意的控制效果。
的智力了。而影响二次回路上的电磁主要体现在控制开关场的磁 场,我们可以禁止工作人员使用步话机,也可以将开关场进行磁场 隔离,这些都是很好的办法,相信只要我们想得到,一切问题都可 以找到解决的方法。电
(下转第 233 页)
230
◇机电设备◇
2013 年第 05 期
③从外部引入到变电所装置设备的空触电,而且要采用光电 隔离。
④CPU 的插件总线不能往外引,避免产生感应电流。 ⑤模拟量不使用插件。 ⑥背板采用抗干扰设置。 3.5 在二次回路上采取的另外一些抗干扰措施 ①强电流和弱电流不采用同一根电缆,否则强电流和弱电流 相遇会产生极其严重的后果。 ②保护电缆和电缆不采用同一层铺设路径。 ③保护电缆应尽可能远离高电流设备,最好是垂直铺设而不 是平行铺设。 ④由同一设备引出的电缆必须设立在同一个开关场,这样便 于管理和操作。 结语: 继电保护装置在各种大型发电站都有应用,因此进行良好的 抗干扰是非常有用的,我们应该不仅在源头上进行抗干扰措施,同 时应该在二次回路上进行电磁抗干扰,这就要求设备本身具有抗 干扰能力,而要在二次回路上进行抗干扰这就要求我们具有一定
[4] 张剑辉. 浅谈 660MW 汽轮机无垫铁安装工艺[J]. 中国新技 术新产品, 2012, (20): 132- 133.
参考文献: [1] 王群京,姜卫东,倪有源,赵涛.无刷直流电机的自适应Fuzzy- PI 控制器的仿真[J]. 电气传动, 2004,(03). [2] 乔维德.基于微粒群算法的模糊控制在 BLDCM 中的应用[J]. 微电机, 2008,(06). [3] 李晓斌,张辉,刘建平. 利用 DSP 实现无刷直流电机的位置控 制[J]. 机电工程, 2005,(03). [4] 王永益,王家军,庞全.无刷直流电动机的模糊积分变结构控 制[J]. 机电工程,2008,(06).
图 2 电机启动过程
图 3 电机加减速过程
233
出变量作为电流环给定信号的二维模糊控制器。模糊控制器选用二
维模糊控制器,下面是模糊控制器的设计步骤:
a) 取 7 个语言变量:{负大,负中,负小,零,正小,正中,正大} ,
输入输出变量的模糊子集均为: {NB,NM,MS,ZO,PS,PM,PB} ,论
域均为:{- 3 ,- 2 ,- 1 ,0,1 ,2,3}。
2013 年第 05 期
◇机电设备◇
基于模糊 PI 控制的无刷直流电机控制系统
傅涛 (北京经纬纺机新技术有限公司 北京 100176)
【摘 要】本文采用了一种基于模糊 PI 控制的无刷直流电机控制系统,设计了模糊 PI 控制器,应用模糊算法在线自动整定 PI 参数。 在 此基础上应用数字信号处理器搭建了调速系统的硬件,编写了系统的软件。仿真和实验结果表明,此调速系统响应快、超调小、稳定性强,具 有较强的鲁棒性和令人满意的性能。
基于语言规则与模糊推理的控制理论,它是智能控制的一个重要分