无位置传感器无刷直流电机的换相方式研究
直流无刷电机无位置传感器控制方法

直流无刷电机无位置传感器控制方法摘要:在直流无刷电机的使用过程中,不能很准确的接收换相信号,因此,就导致该电机无法实现对换相良好的控制,为了解决这类问题的出现,本篇文章将对直流无刷电机中无位置传感器进行研究与分析,并且找到有效的控制方法。
具体的方法是利用电机内部的各种装置之间的联系,来建立出一个直观的电机模型,之后通过电机内部反电势力的不断变化来研究反电势对于换相位置的影响,在经过一定的计算从而能够保证换相信号的准确性,最终实现对其良好的控制。
本篇文章通过具体的试验与测试来对控制的方法进行验证,最终得出,通过上述的方法,能够实现对其换相的控制。
关键词:直流无刷电机;传感器;换相位置;控制效果前言随着经济与技术的共同发展,使得各种工业也得到了快速的发展,由于直流无刷电机在使用的过程中效率非常高且其的构成比较简单,使得直流无刷电机在各个领域中都被广泛地应用,其中包括航天、汽车、家电、工具等等。
与以往的有刷的电机来说,直流无刷电机的组成部分少了电刷这一部分,但是直流无刷电机的作用原理却比有刷的更为复杂。
在直流无刷电机的使用过程中,可以适当地将电机的电路进行调整,从而更好地实现对于换相信号的收集,实现对其的控制,并能够有效地缩小该电机的体积。
一、直流无刷电机的主要构造在直流无刷电机的使用过程中,主要是通过内部的传感器来对换相位置进行检测。
传感器的种类非常多样,最常见的一般为电磁式传感器、光电式传感器以及霍尔式传感器这三种类型,根据需求的不同来选择合适的传感器类型。
与其他的传感器相比,霍尔式传感器的使用成本比较低,且具有较强的性能条件,因此,该类型的传感器被使用得更加广泛。
为了保证直流无刷电机使用的效率,需要对其进行有效地控制,从而提高对于换相信号搜集的准确性。
二、背景介绍随着经济与技术的共同发展,使得人们对于电机的需求越来越大,随之对电机也有了更高的标准。
过去,大多数使用的是直流有刷电机,但这种电机存在诸多缺陷,无法满足需求。
无位置传感器无刷直流电机位置信号相位补偿

2 0年 9 月 01
电力 电 子技 术
Po rElc r n c we e t i s o
Vo .4.N . 1 4 o9 S p e e 01 e tmb r2 0
无位置传感器无刷直流电机位置信号相位补偿
李 自成 , 善 美 程ቤተ መጻሕፍቲ ባይዱ
(. 1 武汉工程大学 , 电气信 息学院,湖北 武 汉 4 0 7 ;2华中科技 大学,湖北 武 汉 30 3 . 407 ) 3 04
i a to i h f q e c W M wi h n o s ,h a d a e f t r g c r uti e e s r o i n lp o e sn n s n i g mp c fh g - e u n y P r s t i g n ie t e h r w r l i ic i s n c s a y f rsg a r c si g i e sn c i en b c a k EMF T e h h s e a fr tr p s in sg a s i e i by p o u e . h h s ea o e s t n meh d f r . h n t e p a e d ly o oo o i o in i n vt l rd c d T e p a e d ly c mp n a i t o o t l a o
Ke wo d : r s ls ie t u r n tr ;p s in s n o l s ;p a e c mp n ai n y r s b u h e s d r c re tmoo s o i o e s r s h s o e s t c t e o
1 引 言 无 刷 直 流 电机 ( L C 是 一 种 用 电 子 换 相 代 B D M) 替机 械 换相 的新 型 电机 , 常采用 永磁 体 转子 , 通 因具 有功 率 密度 高 、 构 简单 、 结 调速 性 能好 等优 点而 得 到 了广 泛应 用【 但 B D M 需 要用 位 置传 感器 检测 转 1 ] 。 LC
无位置传感器直流无刷电机控制关键技术研究
无位置传感器直流无刷电机控制关键技术研究作者:李娜苏永新来源:《数字技术与应用》2013年第06期摘要:本文结合实际工程项目需求介绍了无位置传感器无刷直流电机控制方法。
首先介绍了无刷直流电机的组成及工作原理,其次介绍了转子位置检测及换相方法,最后介绍了电机启动控制的实现。
实践证明该控制系统具有启动速度快、运行稳定、调速范围广、位置检测精确性高等优点,起到了很好的控制效果,具有广泛的应用价值。
关键词:无位置传感器无刷直流电机反电动势过零比较三段式启动中图分类号:TM33 文献标识码:A 文章编号:1007-9416(2013)06-0017-03传统直流电机具有控制简单、调速范围广及运行效率高等优点,但是由于机械电刷及换向器的存在带来了火花、噪声、电磁干扰等弱点导致直流有刷电机运行可靠性差、维护麻烦从而限制了其应用范围。
直流无刷电机(BLDCM)是在有刷直流电机基础上发展起来的,取消了传统有刷电机利用电刷和机械换向器,利用电子开关逆变线路通过检测转子位置进行换向,具有结构简单、价格低廉、控制方便等优点得到了广泛的应用。
1 直流无刷电机的组成2 直流无刷电机的工作原理3 转子位置检测4 电机的启动控制无位置传感器无刷直流电机的启动是电机控制的难点,在电机空间气隙磁场确定的情况下,无刷直流电机在运行过程中产生的感应反电动式幅值与转子转速成正比。
由于电机在静止及转速较低情况下产生的感应电动势幅值为零或幅值较低,不足以被位置检测电路捕获到反电动式过零点,无法进行自动换向操作。
为了保证无刷直流电机的正常启动需要在启动过程中采取相应措施,目前无刷直流电机最常用的启动方法为“三段式”启动,如图8所示。
由于电机转子位置预定位后转子相对定子绕组仍处于静止状态,在电机绕组中感应电动势为零。
为了使电机转子旋转,需要按一定顺序给各相绕组施加一个切换频率由低到高、绕组内流通电流强度不断增强的他控同步加速信号。
在机壳内部气隙间产生交变的旋转磁场,在该磁场牵引下带动转子跟随旋转。
无位置传感器直流无刷电机控制的研究
护程 序 ,旁路 电阻 R 7主要 用来 对 电路 电流 进行 采
作吉简介:庄乾成 (9 7 17 一) ,男,讲 师,硕士研究生 ,研究方向为智能仪器与测控技术 。 [ 8 第3 卷 91 3 第8 期 2 1— ( ) 01 8下
l
匐 化
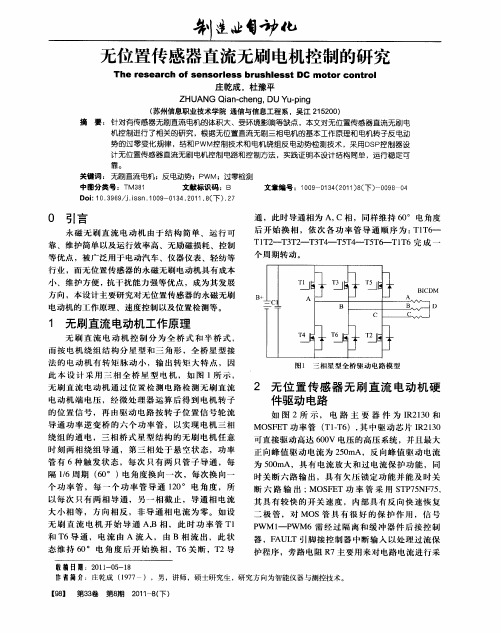
图 2 无刷 直 流 电机 驱 动 电路 示 意 图
个 周期 转动 。
B
1 无刷直流 电动机 工作原理
无 刷 直 流 电动 机 控 制 分 为 全 桥 式 和 半 桥 式 , 而按 电机 绕 组 结 构 分星 型 和三 角形 ,全桥 星型 接 法 的 电动 机 有 转 矩 脉 动 小 ,输 出转 矩 大 特 点 , 因 此 本 设 计 采 用 三 相 全 桥 星 型 电 机 ,如 图 l所 示 ,
为 50 0 mA,具 有 电流 放 大 和过 电流 保 护 功 能 ,同
管 有 6种 触 发 状 态 ,每 次 只 有 两 只 管 子 导通 ,每
隔 1 / 期 (0 6周 6 。)电角度 换 向一 次 ,每 次换 向一
个 功 率 管 ,每 一 个 功 率 管 导 通 10 电 角度 ,所 2。
样 ,阻值 为 4 Q, 转 化为 电压 信 号后 需 经过 放大 8 其
一
无 刷 直 流 电 动机 通 过 位 置 检 测 电 路 检 测无 刷 直 流
图 1 三 相 பைடு நூலகம் 型 全桥 驱动 电路 模 型
电动 机端 电 压 ,经 微 处 理 器 运 算 后得 到 电机 转 子 的 位 置 信 号 ,再 由驱 动 电 路 按 转子 位 置 信 号 轮 流 导 通 功 率逆 变桥 的六 个 功 率 管 ,以实 现 电机 三 相 绕 组 的通 电 ,三 相 桥 式 星 型 结构 的无 刷 电机 任 意 时 刻 两 相 绕 组 导通 ,第 三 相 处 于 悬 空 状 态 ,功 率
无刷直流电机高精度换相控制

控制与应用技术I EMCA电札与披制应用2019,46(10)无刷直流电机高精度换相控制尤钱亮,陆佳琪(江苏科技大学电子信息学院,江苏镇江212003)摘要:针对无刷直流电机(BLDCM)换相期间不导通相续流而产生端电压脉冲的问题,依据反电动势(EMF)过零法原理,分析了端电压脉冲产生的原因及对反电动势过零检测精度的影响,提岀了一种利用软件算法避开端电压脉冲从而实现无位置传感器BLDCM高精度换相的控制方法。
首先,利用条件语句及程序运间差避开端电压脉冲;为了提高程序运间差的,提岀一种换相续流间的方法;最后,搭建了无传感器BLDCM试验平台对上述方法试验验证&试验 了所提方法不的&关键词:无刷直流电机;端电压脉冲;反电动势过零;换相续流中图分类号:TM33:TP273文献标志码:2文章编号:1673-6540(2019)10-0046-05High Precision Commutation Control of Brushless DC MotorYOU Qianliang,LU Jiaqi(School of Electronics and Information,Jiangsu University of Science and Technology,Zhenjiang212003,China)Abstract:Aiming ai the problem of terminaO voltage pulse ceused by non-conducting phase continuum during commutation of brushless DC motor,based on the pOncipte of back electromotive force(EMF)zero-crossing,the ceuscs of teiminal veltage pulse and itr influencc on the detection accuocy of back-EMF zero-crossing were analyzed.A controe siategy for high precision commutation of sensorless brushless DC motor by avoiding voltage pulseusing softyaro algorithm was proposed.The conditional statement and prooram run time dmerenco were used i avoid the voltaae pulse.At the same time,in ordeo i improve the fault tolerancc rate of run time dmerencc of the desioned prooram under heavy load,a saategy O s reducc commutation continuum time was proposed.Finally,a sensorless brushless DC motOT experimentat platform was built to veoiy the above sOategy.The experimentat resultr showed the eSectiveness and accuocy of the proposed strateey under dmerent duty cycles and loads.Key worUs:brushless DC motor(BLDCM);terminal voltage pulss;back electromotive force(EMF) zero-crossing;commutation continuum0引言无刷直流电机(BLDCM)具有结构简、运行高,了的应用。
什么是无刷直流电机换向的最有效方法

什么是无刷直流电机换向的最有效方法无刷直流电机(BLDC)是一种具有高效、高功率和高启动扭矩的电动机。
为了实现电机的换向,需要通过外部控制来改变电机的线圈通断状态。
目前常用的无刷直流电机换向方法有电子换向和传感器换向两种。
下面将详细介绍这两种方法的原理和应用。
1.电子换向电子换向是通过电机控制器内部的电子电路来实现换向的方法。
这种方法不需要外部传感器来检测电机的转子位置,而是通过测量电机内部的反电势和电流来判断转子位置。
电子换向的原理是利用电机内部的反电势和电流的变化规律,来判断转子的位置和速度。
通常情况下,电机的每一相都有一个换流器,通过控制各个换流器的开关状态,可以实现电流在不同线圈之间的流动,从而控制电机的转动方向和速度。
电子换向的优点是结构简单、成本低,可靠性高。
同时,由于不需要外部传感器来检测转子位置,电子换向的电机结构比较简洁,体积小,适用于空间受限的应用。
2.传感器换向传感器换向是通过外部传感器来检测电机转子的位置,然后根据检测结果来控制电机的换向。
目前常用的传感器有霍尔元件、磁编码器和光电开关等。
传感器换向的原理是利用传感器检测转子位置和反馈给控制器,然后控制器根据转子位置来控制电机的换向。
通常情况下,传感器换向需要增加传感器和位置信息的处理电路,增加了电机的复杂性和成本。
传感器换向的优点是准确性高,可以实现更精确的控制。
同时,通过外部传感器检测转子位置,能够实时了解电机的状态,可以更好地控制电机的转动,提高电机的性能。
综上所述,无刷直流电机的换向方法包括电子换向和传感器换向。
电子换向的优点是结构简单、成本低,适用于空间受限的应用;传感器换向的优点是准确性高,可以实现更精确的控制。
根据不同的应用需求和成本要求,可以选择适合的换向方法。
在实际应用中,通常会根据电机的转动要求、效率要求和成本考虑等因素,选择合适的换向方法来实现最优的控制效果。
无刷直流电动机无传感器换相误差自校正方法
r®计分祈a n d a m ls i紙择去机I 2〇l8年第46卷第7期无刷直流电动机无传感器换相误差自校正方法金浩,殷英,苗欣,李言民,梁建英(中车青岛四方机车车辆股份有限公司,青岛266111)摘要:针对无刷直流电动机无位置传感器换相技术存在残留换相误差问题,研究了一种换相误差自校正的 控制方法。
将电机一相绕组端电压与中性点电压作差处理的信号输入至采样电路,在该相绕组导通前后对称位 置,分别对该信号采样,并以前后两次采样电压相等为目标,建立换相误差P I控制回路。
经控制回路对换相误差 的校正,导通前后两次采样的电压最终收敛到相同的电平;与此同时,电机换相点收敛到正确的时刻。
实验表明,该方法仅利用电机一相绕组以及中性点,便能有效对换相误差实现闭环校正,实时补偿外界因素对换相间隔时间 的干扰。
关键词:无刷直流电动机;电机控制;无位置传感器中图分类号:TM351;TM464 文献标志码:A 文章编号:1004-7018( 2018) 07-0044-05Self-Compensation Method for the Commutation Error of Sensorless Control of Brushless DC Motor JIN Hao,YIN Ying,MIAO Xin,LI Yan-min,LIANG Jian-ying(CRRC Qingdao Sifang Co. ,Ltd.,Qingdao266111 ,China)Abstract :T o re d u c e th e co m m u tatio n e rro r of th e sen so rle ss c o n tro l o f b ru sh le ss D C m o to r, a s e lf-c o m p e n s a tio n m e tho d w as p ro p o se d. A t th e p o in t o f o n e p h a se tu rn e d o n a n d o ff, sp e c ia l v oltage o f w as sam p led. A fte r th e tw o v oltag e s u btra c te d ,a c o n tro l loop w as in tro d u c e d to m ak e th e v oltage d iffe re n c e a p p ro a c h zero. T im e p h a se c h a n g e p o in t w as le d to th e a c c u ra te p o sitio n a t th e sam e. Tw o p o in t o f th e b a c k-E M F w as sa m p led d u rin g a n e le c tric a l c y c le to c o m p en satin g co m m uta tio n erro r. T h e e x p e rim e n t v erified th a t th e m eth o d w as sim p le a n d re lia b le.Key words:b ru sh le ss DC m oto r (B L D C M) ;m o to r c o n tro l;p o sitio n sen so rle ss0引言无刷直流电动机(以下简称BLDCM)具有速度 控制精度高、安全、高效等特点,是驱动磁悬浮控制 力矩陀螺高速转子的理想选择[1]。
无刷直流电机的无位置传感器控制
无位置传感器控制技术是无刷直流电机研究的热点之一,国内外相关研究已经取得阶段性成果。
在无刷直流电机工作过程中,各相绕组轮流交替导通,绕组表现为断续通电。
在绕组不通电时,由于绕组线圈的蓄能释放,会产生感应电动势,该感应电动势的波形在绕组两端有可能被检测出来。
利用感应电动势的一些特点,可有取代转子上的位置传感器功能,来得到需要的换相信息。
由此,就出现了无位置传感器的无刷直流电动机。
尽管无位置传感器控制方式使得转子位置检测的精确度有所降低,但由于取消了位置传感器,电机的结构更加简单,安装更加方便,成本降低,可靠性进一步提高,在对体积和可靠性有要求的领域以及不适合安装位置传感器的场合,无位置传感器无刷直流电机应用广泛。
无位置传感器控制方式下的无刷直流电机具有可靠性高、抗干扰能力强等优点,同时在一定程度上克服了位置传感器安装不准确引起的换相转矩波动。
无位置传感器技术是从控制的硬件和软件两方面着手,以增加控制的复杂性换取电机结构复杂性的降低。
以采用120o电角度两两导通换相方式的三相桥式Y接无刷直流电机为例,讨论基于现代控制理论和智能算法的无刷直流电机无位置传感器控制方法。
转子位置间接检测法目前无刷直流电机中主要采用电磁式、光电式、磁敏式等多种形式的位置传感器,但位置传感器的存在限制了无刷直流电机在某些特定场合的应用,主要体现在:1、位置传感器可使电机系统的体积增大;2、位置传感器使电机与控制系统之间导线增多,使系统易受外界干扰影响;3、位置传感器在高温、高压和湿度较大等恶劣工况下运行时灵敏度变差,系统运行可靠性降低4、位置传感器对安装精度要求较高,机械安装偏差引起的换相不准确直接影响电机的运行性能。
无位置传感器控制技术越来越受到重视,并得到了迅速发展。
依据检测原理的不同,无刷直流电机无位置传感器控制方法主要包括反电势法、磁链法、电感法及人工智能法等。
反电势法反电势法(感应电动势过零点检测法)目前是技术最成熟、应用最广泛的一种位置检测方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无位置传感器无刷直流电机的换相方式研究
作者:王新坤,杨娜东北大学
引言
永磁无刷直流电机由于其无换向火花、运行可靠、维护方便、结构简单、无励磁损耗等众多优点,自20世纪50年代出现以来,就在很多场合得到越来越广泛的应用。
传统的永磁无刷直流电机均需一个附加的位置传感器,用以向逆变桥提供必要的换向信号。
它的存在给直流无刷电机的应用带来很多不便:首先,位置传感器会增加电机的体积和成本;其次,连线众多的位置传感器会降低电机运行的可靠性,即便是现在应用最为广泛的霍尔传感器,也存在一定程度的磁不敏感区;再次,在某些恶劣的工作环境中,如在密封的空调压缩机中,由于制冷剂的强腐蚀性,常规的位置传感器根本就无法使用;此外,传感器的安装精度还会影响电机的运行性能,增加生产的工艺难度。
针对位置传感器所带来的种种不利影响,近一二十年来,永磁无刷直流电机的无位置传感器控制一直是国内外较为热门的研究课题。
从20世纪70年代末开始,截至目前为止,永磁无刷直流电机的无位置传感器控制已大致经历了3个发展阶段,针对不同的电机性能和应用场合出现了不同的控制理论和实现方法,如反电势法、续流二极管法、电感法等。
所谓的无位置传感器控制,正确的理解应该是无机械的位置传感器控制,在电机运转的过程中,作为逆变桥功率器件换向导通时序的转子位置信号仍然是需要的,只不过这种信号不再由位置传感器来提供,而应该由新的位置信号检测措施来代替,即以提高电路和控制的复杂性来降低电机的复杂性。
所以,目前永磁无刷直流电机无位置传感器控制研究的核心和关键就是架构一转子位置信号检测线路,从软硬件两个方面来间接获得可靠的转子位置信号,借以触发导通相应的功率器件,驱动电机运转。
1 传统反电动势检测方法
无刷直流电机中,受定子绕组产生的合成磁场的作用,转子沿着一定的方向转动。
电机定子上放有电枢绕组,因此,转子一旦旋转就会在空间形成导体切割磁力线的情况。
根据电磁感应定律可知,导体切割磁力线会在导体中产生感应电热。
所以,在转子旋转的时候就会在定子绕组中产生感应电势,即运动电势,一般称为反电动势或反电势。
1.1 传统反电动势检测的原理
具有梯形反电动势波形的三相无刷直流电机主电路,对于某一相绕组(假设A相),其导通时刻的基本电路原理图如图1所示。
1.2 反电动势的推导
无刷直流电机的三相端电压方程:
由于采用两相导通三相六拍运行方式,任一瞬间只有两相导通,设A相、B相导通,且A+,B-,则A、B两相电流大小相等,方向相反,C相电流为零。
式(5)即为C相反电动势检测方程。
同理,A和B相反电动势检测方程为:
但是实际上,绕组的反电动势难以直接测取,因此,通常的做法是检测电机端电压信号,进行比较来间接获取绕组反电动势信号的过零点,从而确定转子的位置,故这种方法又称为“端电压法”。
基于端电压的反电动势检测电路如图2所示,将端电压Ua、Ub、Uc分压后,经过滤波得到检测信号Ua、Ub、Uc,检测电路的O点与电源负极相连,因此式(5)~(7)转化为:
根据上述结论,检测到反电动势过零点后,再延迟30°即为无刷直流电动机的换相点。
但实际的位置检测信号是经过阻容滤波后得到的,其零点必然会产生相位偏移,实际应用时必须进行相位补偿。
2 新型检测方式的提出
针对以上现有技术存在的缺点,提出一种电路简单、成本低、恒零相移滤波,无需构建虚拟中性点,无需速度估测器和相移校正,在整个高转速比的范围内都能保持输出准确换相信号。
该换相信号与霍尔传感器输出的换相信号完全一致,无需高速控制IC,可以直接使用与霍尔传感器相配套的低价控制IC。
2.1 电路构成
本设计采用方案包括3个分压电路、3个恒零相移滤波电路和3个线电压比较器,如图3所示。
其特征在于3个分压电路分别由两个电阻R1、R2串联,其R1的一端作为输入端分别无刷直流电机的三相电机线连接,R2接地,R1、R2的连接点作为输出端,分别与相应线电压比较器的正确输入端连接;3个恒相移滤波电路分别由两个电阻R3、R4,两个电容C1、C2和一个集成运放构成。
电容C1并连接于分压电路R2。
电容C2的一端与运放的正输入端连接并与电容C1的一端连接,另一端与运放的负输入端连接。
电阻R4的一端与运放的负输入端连接,另一端接地。
3个线电压比较器的正输入端分别与相应分压电路的输出端连接,而负输入端分别与相邻分压电路的输出端连接。
各线电压比较器的输出分别作为电机的换相信号。
2.2 电路分析
本设计与以往技术相比,由于采用了不随电机转速变化的恒零相移滤波电路,无需相移校正,而送到比较器正负端的电压是两路没有相移的端电压,无需构建虚拟中性点。
比较器检测到的是线电压的过零点,这个过零点正好对应电机的换向点,因此,输出的换相信号与霍尔传感器输出的换相信号完全一致。
在无刷直流电机高转速比的范围内,无需高速控制IC,可以直接使用与霍尔传感器相配套的低价控制IC,电路结构简单,成本低,可以替代霍尔传感器广泛应用在家电、计算机外设和电动车用等无刷直流电机上。
电机三相端电压Va、Vb、Vc经3个分压电路和恒零相移滤波电路后,得到幅值减小的平滑端电压Vao、Vbo、Vco,滤波前后每一相端电压的相移角度φ为:
式中ω为电机运行的角速度。
只要设计,就可以使得滤波前后的相移角度恒为零,确保端电压的过零点滤波前后不会跟随电机速度的变化而移动,无需相移校正。
相邻两相的恒零相移端电压送到比较器后,比较器比较的是两相端电压,实质上就是检测线电压的过零点。
这个过零点正好对应电机的换相点,因此,比较器输出的换相信号与霍尔传感器输出的换相信号完全一致。
2.3 实验验证
Va、Vb、Vc、Vao、Vbo、Vco及各换相信号的波形图略——编者注。
结语
本文利用无刷直流电机端电压设计的换相控制电路,结构简单,运行可靠。
经过实验证实,此电路输出的换相信号与霍尔传感器输
出的换相信号完全一致,从而在一定程度上可以替代霍尔传感器,并可应用于较高温、高压、高辐射等传感器无法胜任的场。
不过由于器件自身的局限性,在一些更加恶劣场合的应用还有待测试和改善。