爬壁机器人分类与行走机构
爬壁机器人的组成结构
爬壁机器人的组成结构一、引言爬壁机器人是一种能够在垂直墙面上行走的机器人,它具有很强的适应性和灵活性,被广泛应用于建筑、航空、军事等领域。
本文将介绍爬壁机器人的组成结构,以便读者更好地了解其原理和工作方式。
二、爬壁机器人的主要组成部分1. 机身爬壁机器人的机身是整个系统的核心部分,它包括了所有关键零部件和控制系统。
通常,机身由铝合金或碳纤维材料制成,具有轻量化和高强度的特点。
在机身内部,还配备了电池、电机、传感器等各种设备。
2. 行走模块行走模块是爬壁机器人中最为重要的组成部分之一,它通过运动来实现在墙面上行走。
行走模块通常由几个轮子或履带组成,并且能够自主地调整其形态以适应不同墙面的形状和倾斜角度。
3. 传感器传感器是爬壁机器人中必不可少的组成部分之一,它可以通过感知周围环境来帮助机器人决策。
传感器通常包括激光雷达、红外线传感器、摄像头等,能够精确地测量墙面的倾斜角度和距离。
4. 控制系统控制系统是爬壁机器人中最为关键的组成部分之一,它通过对机身和行走模块的控制来实现在墙面上行走。
控制系统通常由微处理器、电路板等组成,能够自主地调整机身和行走模块的姿态以适应不同墙面的形状和倾斜角度。
三、爬壁机器人的工作原理1. 行走原理爬壁机器人的行走原理是利用吸盘或者磁力来实现在垂直墙面上行走。
吸盘式爬壁机器人通过吸附力将机身固定在墙面上,而磁力式爬壁机器人则是通过电磁铁将自身与墙面产生磁性吸引力。
2. 控制原理爬壁机器人的控制原理是通过传感器不断地获取周围环境信息,并根据这些信息来调整机身和行走模块的姿态,以保证机器人在墙面上行走时的稳定性和安全性。
四、爬壁机器人的应用领域1. 建筑爬壁机器人可以在高楼外墙进行维护和清洁工作,大大提高了工作效率和安全性。
2. 航空爬壁机器人可以在飞机表面进行维护和清洁工作,减少了人力成本和风险。
3. 军事爬壁机器人可以在战场上执行侦察任务,并且能够适应各种地形环境。
五、结论通过本文的介绍,我们了解了爬壁机器人的组成结构、工作原理以及应用领域。
管道攀爬机器人结构设计及行走动力特性分析

管道攀爬机器人结构设计及行走动力特性分析一、结构设计:1.机器人主体结构:管道攀爬机器人的主体结构一般由多个可伸缩的模块组成,每个模块包括一个电机、行走轮和一个伸缩杆。
2.伸缩机构:机器人通过伸缩杆来适应不同管道尺寸。
伸缩杆一般采用多节设计,每个节段之间通过齿轮或链条进行连接,以实现伸缩功能。
3.行走轮和传动机构:机器人采用行走轮来实现在管道内的行走。
行走轮通常由橡胶材料制成,提供良好的摩擦力。
传动机构一般为电机与行走轮的传动装置,通常采用齿轮传动或链条传动。
4.控制系统:机器人的控制系统包括传感器、执行器和控制器。
传感器可以感知机器人的位置、姿态和环境条件等信息,以便进行自主导航和任务执行。
执行器包括电机和伸缩杆等组件,用于控制机器人的运动和伸缩。
控制器负责接收传感器信息,并根据预设的算法控制机器人的运动。
二、行走动力特性分析:1.爬行速度:管道攀爬机器人的爬行速度取决于行走轮的直径、电机的转速和传动机构的设计等因素。
一般来说,机器人爬行速度应该足够快,以提高任务完成效率。
2.负载能力:机器人承载工具和传感器进行任务执行,因此需要具有较大的负载能力。
负载能力的大小与机器人的结构强度和设计参数有关。
3.自稳定性:机器人在管道内行走时需要具备较好的自稳定性,以应对管道内的复杂环境。
自稳定性主要通过控制系统实现,通过传感器检测机器人的姿态和环境条件,并及时做出调整。
4.能耗与动力供应:管道攀爬机器人通常采用电池供电,因此需要考虑能耗和续航时间。
一般通过优化结构设计和控制算法,减小阻力和能耗,延长电池寿命。
5.适应性:管道攀爬机器人需要适应多种管道的尺寸和形状。
因此,其结构设计应具有一定的自适应性,能够根据管道的不同尺寸进行伸缩和调整。
综上所述,管道攀爬机器人的结构设计和行走动力特性是保证机器人能够在管道内进行任务执行的关键要素。
通过合理的结构设计和动力调节,可以使机器人具有较高的工作效率和可靠性,适应不同尺寸和形状的管道。
机器人机身及行走机构
2.回转与俯仰机身:
机器人手臂的俯仰运动,一般采用活塞 缸与连杆机构实现。手臂俯仰运动用的 活塞缸位于手臂的下方,其活塞杆和手 臂用铰链连接好,缸体采用尾部耳环或 中部销轴等方法与立机器人行走机构
1.行走机构的构成:
机器人行走机构通常由驱动装置、传 动装置、位置检测装置、传感器、电 缆和管路等构成。
构成:
主要由升降缸体、齿条缸、齿轮套筒、固定立柱和升降回 转台等部分构成。
工作原理:
回转运动:
齿条缸的齿条活塞杆直线运动→齿轮套筒6回转运动→齿轮 套筒6 和升降缸体2及升降回转台1固联→升降回转台1 回转
升降运动:
升降缸体2、齿轮套筒6、回转台1整个一起升降运动
齿条活塞缸—升降缸机构图例:
履带式行走机器人图例(1):
履带式行走机器人图例(2):
6.脚踏行走机器人:
脚踏行走机器人即步行机器人,典型特 征是不仅能在平地上,而且能在凹凸不 平的地上步行,能跨越沟壑,上下台阶, 具有广泛的适应性。主要设计难点是机 器人跨步时自动转移重心而保持平衡的 问题。
两足步行机器人图例:
控制特点:
四足机器人步行 时,一只脚抬起, 三只脚支撑自重, 这时有必要移动 身体,让重心落 在三只脚接地点 组成的三角形内。
四足机器人图例(2):
四足机器人图例(3):
7.其它行走机器人:
爬壁机器人: 车轮和脚混合式机器人:
行走机构设计的注意点:
平稳性-静态和动态的平稳 灵活性—转向、越障、爬坡
这种类型的机器人 主体结构的三个自 由度均为回转运动, 构成机器人的回转 运动、俯仰运动和 偏转运动。通常仅 把回转运动归结为 机身。
9、经验显示,市场自己会说话,市场永远是对的,凡是轻视市场能力的人,终究会吃亏的!21.9.1221.9.12Sunday, September 12, 2021
爬壁机器人的行业报告

爬壁机器人的行业报告随着移动机器人的迅速发展,壁面爬行机器人得到了各界的高度重视,并在军事、工业以及民用等领域得到了广泛的应用。
(1)建筑外墙面清洗机器人现阶段高层建筑外墙面的清洁多采用人工高空清洗的方式,工人搭乘吊篮、升降平台或者用安全绳的方式进行清洗,这些方式存在工作效率低,尤其是对工人安全存在很大的隐患。
而建筑外墙清洗机器人可以替代工人完成外墙清洗工作,其可以分为粗糙表面的外墙清洗机器人和玻璃表面外墙清洗机器人。
(2)造船业应用的机器人我国的船舶制造业在制造领域占有重要的地位,随着海洋运输、深海探测等迅速发展,对船舶制造技术提出了更高的要求,船舶的制造过程主要的加工工序有焊接、除锈、喷涂等操作,由于这些制造过程环境极其恶劣,比如在焊接过程中,工人需要在密闭的空间中承受近60 ℃的高温,近年来国内外积极推动将爬壁机器人应用于船舶制造过程的焊接、涂装、除锈的制造领域。
(3)管道爬壁机器人管道在工业生产中发挥着很重要的作用,比如石油管道、天然气管道、化工行业应用的各种管道、建筑物内的通风管道、城市管网、工业大型锅炉的热交换管道等等。
应用于管道的爬壁机器人通常有管内爬壁机器人和管外爬壁机器人,机器人通常完成的工作任务有焊接、检测。
(4)罐体爬壁机器人在工业生产中,罐体在石化、冶金等领域有广泛的应用,如液化石油气、天然气储罐,是由若干经过预先弯曲成球面的钢板通过焊接而成,存储过程中罐体受到较大的工作压力,一旦金属罐体产生泄露将造成重大的安全生产责任事故,因此对这些压力容器的外壁,严格规定了清理周期为1 年,且其罐内壁检测检验的周期不超过6 年,这些行业对于爬壁机器人的需求也极为迫切。
1 爬壁机器人的吸附方式通常情况下,爬壁机器人需要在陡峭或者垂直的壁面上行走,甚至在大于90°的壁面或者天花板上面行走。
因此爬壁机器人首先需要解决的问题是克服重力的作用,实现机器人的攀爬动作。
而爬壁机器人的攀爬多采用吸附的方式。
爬壁机器人的组成结构
爬壁机器人的组成结构一、爬壁机器人的概述爬壁机器人(Climbing Robot)是一种能够在垂直墙面或倾斜表面上爬行的机器人。
它利用各种机械结构和传动系统,实现由地面到垂直墙面的过渡,并能在墙面上自由移动。
爬壁机器人具有重要的应用价值,可以用于建筑物外墙的清洁、检测以及施工等任务。
二、爬壁机器人的主要组成部分爬壁机器人的组成结构可以大致分为以下几个部分:1. 机械结构爬壁机器人的机械结构是实现其爬行功能的重要部分。
机械结构通常包括车身、爬行模块、传动系统等组成部分。
其中,车身是机器人的主体部分,承载其他的组件和模块。
爬行模块是负责机器人在墙面上爬行的关键部分,它通常由爬行轮、爬壁脚和贴附装置组成。
传动系统是将电动机或液压装置的能量传递给爬行轮,使机器人能够在墙面上前进。
2. 传感器系统传感器系统是爬壁机器人必备的部分,它能够感知机器人所处的环境和墙面的状态,为机器人提供必要的信息和反馈。
传感器系统通常包括视觉传感器、触觉传感器、力传感器等组件。
视觉传感器可以通过摄像头或激光雷达等设备获取墙面的图像和距离信息,以辅助机器人的导航和定位。
触觉传感器和力传感器可以检测机器人与墙面的接触力和压力,以确保机器人的贴附效果和安全性。
3. 控制系统控制系统是爬壁机器人的”大脑”,负责对机器人进行控制、导航和路径规划等操作。
控制系统通常由嵌入式计算机、传感器接口、动力系统等组成。
嵌入式计算机能够接收传感器的数据,并根据预设的算法和程序对机器人进行实时控制。
传感器接口则用于与传感器进行数据交互,动力系统则负责为机器人提供能量。
4. 电源系统电源系统是为爬壁机器人提供能量的部分,它通常包括电池、电源管理模块和充电系统等组件。
电池是机器人的动力源,可以为机器人提供持续的电能供应。
电源管理模块可以对电池进行电能的管理和分配,以确保机器人的稳定运行。
充电系统则是为电池提供充电服务,以维持机器人长时间的工作能力。
三、爬壁机器人的实现原理爬壁机器人的实现原理可以概括为以下几个步骤:1. 贴附墙面爬壁机器人利用贴附装置将自身稳固地贴附到墙面上。
爬壁机器人原理

爬壁机器人原理
爬壁机器人是一种能够在垂直表面上移动的机器人,它通常被设计用于执行检查、维护、清洁等任务,特别是在需要攀爬高楼大厦或其他垂直结构的环境中。
以下是一般爬壁机器人的原理和设计考虑因素:
吸附力或附着力:爬壁机器人通常使用吸盘、气动吸附、磁性或其他附着技术来在垂直表面上产生足够的附着力。
这确保了机器人能够紧密粘附在墙面上,防止它在运动中脱落。
传动系统:为了在垂直表面上移动,爬壁机器人必须具备适当的传动系统。
常见的传动系统包括轮子、履带、腿部或其他可移动的机构。
这些系统需要具备足够的灵活性和稳定性,以适应不同表面的特性。
感知和导航系统:为了在爬行过程中避免障碍物或调整移动路径,爬壁机器人通常配备了各种感知和导航系统。
这可能包括摄像头、激光传感器、超声波传感器等,以帮助机器人感知周围环境并作出相应的决策。
电源和能源:爬壁机器人需要稳定的电源来驱动其各个部件,以及足够的能源供应,以确保在执行任务时具备足够的工作时间。
一些设计中可能包括可充电电池或连接到外部电源的能源系统。
结构和材料:由于爬壁机器人需要在垂直表面上移动,其结构和材料必须具备足够的强度、轻量性和耐久性。
这可能涉及使用高强度的合金材料或先进的复合材料。
安全性考虑:在设计爬壁机器人时,必须考虑到安全性,特别是在高度或危险环境中的应用。
防止机器人脱离表面、防止外部物体受到机器人运动的影响,以及制定应对机器人故障的安全措施都是重要的考虑因素。
这些原理和设计考虑因素使得爬壁机器人能够在垂直表面上安全、高效地执行各种任务。
爬墙机器人综述
爬墙机器人结构设计1爬墙机器人分类1.1 用于检测和维修领域爬墙机器人需满足的要求1)速度和机动性:对爬墙机器人来说速度和机动性是它最重要的两个参数。
由于垂直结构的尺寸要求,即使在竖直方向或者天花板上,在检测区域和一些相似点之间也需要实现快速移动。
其他的要求与系统的操控和定位能力有关,这包括移动轨迹的精确性,因为一些用于检测的传感器要求在表面进行光滑且连续的运动。
也有可能要求机器人横向运动或者旋转360°来满足位置传感器和一些工具的要求。
最后一点,机器人必须解决台阶和突起等越障问题,以此来保证其可以到达建筑物的任何一个角落。
2)负载能力:机器人必须具有携带不同重量的负载的能力。
对于一个表面的检测,携带至少10kg的检测装置负载是必须的,因此,机器人的尺寸、吸附和运动装置都应该满足应用的要求。
3)可靠性和安全性:鲁棒性是机器人一个非常重要的非功能性的性质。
如果爬墙机器人在它的一次任务中失败了,它就不能在实践中投入使用。
可靠性和安全性要求包括:硬件鲁棒性、最优控制、检测方法、处理危险情况以及自我恢复等。
系统本身要保证吸附的足够安全,因为就算是可控的跌落也是很危险的。
4)易用性:作为一个检测装置,爬墙机器人需要比一般的装置更强大、更有效率、更安全。
这当然也包括机动性和处理问题的多样性。
因此,根据任务要求,它必须能携带各种不同的负载,容易损耗的零件能够快速被替换,与现有的技术相比它的操作必须快且简单,此外,能耗、重量及机器人的尺寸也是很重要的。
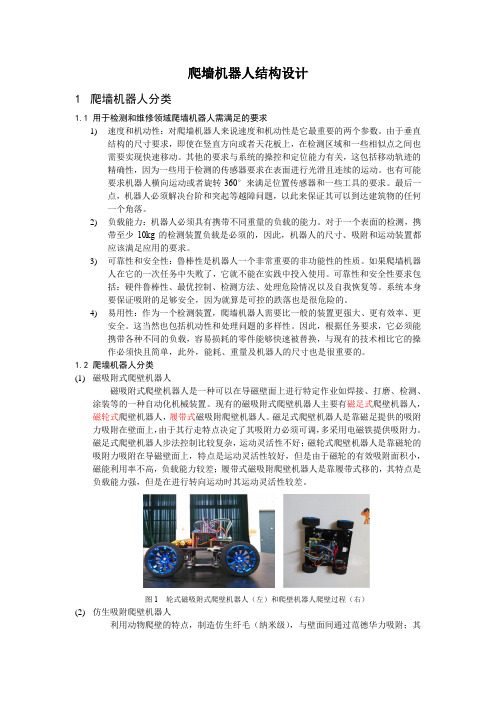
1.2 爬墙机器人分类(1)磁吸附式爬壁机器人磁吸附式爬壁机器人是一种可以在导磁壁面上进行特定作业如焊接、打磨、检测、涂装等的一种自动化机械装置。
现有的磁吸附式爬壁机器人主要有磁足式爬壁机器人,磁轮式爬壁机器人,履带式磁吸附爬壁机器人。
磁足式爬壁机器人是靠磁足提供的吸附力吸附在壁面上,由于其行走特点决定了其吸附力必须可调,多采用电磁铁提供吸附力。
磁足式爬壁机器人步法控制比较复杂,运动灵活性不好;磁轮式爬壁机器人是靠磁轮的吸附力吸附在导磁壁面上,特点是运动灵活性较好,但是由于磁轮的有效吸附面积小,磁能利用率不高,负载能力较差;履带式磁吸附爬壁机器人是靠履带式移的,其特点是负载能力强,但是在进行转向运动时其运动灵活性较差。
爬壁机器人特点

1 传统爬壁机器人的结构、吸附方式、移动方式及其特点爬壁机器人必须具有两个基本功能:在壁面上的吸附功能和移动功能。
传统爬壁机器人按吸附功能可分为真空吸附和磁吸附两种形式:真空吸附法又分为单吸盘和多吸盘两种结构形式,具有不受壁面材料限制的优点,但当壁面凸凹不平时,容易使吸盘漏气,从而使吸附力下降,承载能力降低;磁吸附法可分为电磁体和永磁体两种,电磁体式维持吸附力需要电力,但控制较方便。
永磁体式不受断电的影响,使用中安全可靠,但控制较为麻烦。
磁吸附方式对壁面的凸凹适应性强,且吸附力远大于真空吸附方式,不存在真空漏气的问题,但要求壁面必须是导磁材料,因此严重地限制了爬壁机器人的应用环境。
爬壁机器人按移动功能分主要是吸盘式、车轮式和履带式。
吸盘式能跨越很小的障碍,但移动速度慢;车轮式移动速度快、控制灵活,但维持一定的吸附力较困难;履带式对壁面适应性强,着地面积大,但不易转弯。
而这三种移动方式的跨越障碍能力都很弱。
2 国内外壁面爬行机器人的发展概况自1966年日本的西亮教授研制出第一个爬壁机器人以来,爬壁机器人在日本得到蓬勃发展。
之后, 英国、西班牙、美国、德国和俄罗斯等国也相继研制出多种爬壁机器人样机。
20 世纪80年代以来, 国内许多院校和科研单位也在爬壁机器人领域取得了长足的发展, 研制了多种型号的爬壁机器人。
2.1 国外爬壁机器人发展概况爬壁机器人是一种能够在壁面爬行作业的极限作业机器人,它是集机构学、传感技术、控制和信息技术等为一体的高技术产品,世界机器人大国日本在极限作业机器人研究方面尤为积极。
在过去的几十年里,爬壁机器人技术在世界范围内得到迅速发展,也相继研制出了不同种类的样机,有些已经投入实用。
在这一领域,日本取得的成绩突出,美国、英国、法国、意大利、西班牙、澳大利亚、韩国等国也在不断深入研究。
早在1966年,在日本大阪府立大学工学部任讲师的西亮,就利用电风扇进气侧低压空气产生的负压作为吸附力制作了一台垂直壁面移动机器人的原理样机,这被看作是爬壁机器人研究的开端。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二、爬壁机器人移动方式
2.2 车轮式
日本三菱重工两组 永磁铁安装于机器 人腹部能够保证机 器人可靠地吸附于 钢质表面,用于壁 面检测、清洁和喷 漆等作业。
二、爬壁机器人移动方式
2.3 履带式 右图所示,哈尔滨工业大学研
制了永磁铁吸附履带行走式爬壁机 器人,靠两条履带的差速移动来实 现转弯。
在履带一周上安装有数十个永 磁吸附块,其中的一部分紧紧地吸 附在壁面上。
一、爬壁机器人分类
• 吸附原理图
二、爬壁机器人移动方式
• 2.1 腿足式
2004 年,美国密歇根州立大学研制 的两种双足式小型爬壁机器人.
这两款样机均采用欠驱动机构,用 三个电机驱动机器人的五个自由度,减 小了机器人的重量和能量消耗,可以在 光滑无孔的壁面上可靠吸附,例如在墙 壁、天花板上爬行,以及在两个相邻表 面间作过度爬行,也可爬越管道一类的 障碍物。
一、爬壁机器人分类
1.4 机械力抓持吸附式
SpinyBot 的脚上有 极细小的倒钩刺,通过 在粗糙壁面上“扣”住凸 缘实现爬壁,适合在水 泥壁面、砖壁面上作业
一、爬壁机器人分类
1.5 基于范德华力的仿生 壁虎脚掌吸附式(干性粘 剂--人造仿生壁虎脚) 大量的微精细刚毛保 证了壁虎脚掌与接触面 的充分接触,从而产生 强大的黏附力
二、爬壁机器人移动方式
香港城市大学和英国多个 大学的学者在2005年合作开发 出了多足部多吸盘式爬壁机器 人Robug Ⅱs,如右图所示。
该机器人属于吸盘式爬壁 机器人,智能性高,自由度高 ,能够在各种危险和复杂的环 境下工作。它最大的特点是具 有自动寻迹功能和非常灵活的 脚,机器人不仅在墙壁上和地 面上能够自由移动,而且还能 在爬行中实现的从地面到墙壁 转换的自动爬壁。
一、爬壁机器人分类
1.1 真式和多吸盘式
单吸盘式
多吸盘式
一、爬壁机器人分类
• 1.2 磁吸附式
•
磁吸附爬壁机器人是依靠磁力吸附于壁面,适用于导磁性材料构成
的壁面。
一、爬壁机器人分类
• 1.3 旋翼吸附式 使用螺旋泵或者涵道
的风扇产生合适的推力, 从而使机器人能够稳定可 靠地贴附在壁面上
移动时,履带在运动过程中, 可以保持固定数量的永磁吸附块吸 附于壁面,也就保持了一定的吸附 力。
二、爬壁机器人移动方式
2.4 框架式(混合式?) 把真空吸盘和电磁 铁分别安装于框架 上。 特点:移动速度较 慢,机构设计和运 动步态规划比较复 杂,在实际应用中 如果损坏修复麻烦。
爬壁机器人分类和行走机构
主要内容
一、爬壁机器人分类 1.1 真空吸附式 1.2 磁吸附式 1.3 旋翼吸附式 1.4 机械力抓持吸附式 1.5 基于范德华力的仿生壁虎脚掌吸附式
二、爬壁机器人移动方式 2.1 腿足式 2.2 车轮式 2.3 履带式 2.4 框架式
三、爬壁机器人吸附移动方式特点总结 四、主要参考文献