耐波性预报的数值方法
船舶耐波性能实验——阻尼系数测量

船舶耐波性能试验—阻尼系数测量试验学生姓名:学号:学院:船舶与建筑工程学院班级:指导教师:一、船模横摇试验的目的上风浪中航行最易发生横摇,而且横摇的幅度较大,不仅影响船员生活和工作的各个方面,严重的横摇还会危及船舶的安全乃至倾覆失事。
因此,在有关耐波性的研究中,首先关注的是要求设计横摇性能优良的船舶。
由于船舶在波浪中横摇运动的复杂性,理论计算尚未达到可用于实际的程度,因而模型试验是目前预报船舶横摇最可靠的方法。
本教学试验由下列两部分组成,即:1.船模在静水中的横摇衰减试验,目的是确定船的固有周期以及作用在船体上的水动力系数,如附连水惯性矩及阻尼系数等。
据此可根据线性运动方程计算船舶在风浪中的横摇频率响应曲线。
2.船模在规则波中的横摇试验,目的是确定船的横摇频率响应函数,可用于预报船舶在中等海况下的横摇统计特性,对于高海况的预报数值则偏高,这是由于非线性影响的缘故。
二.实验原理通过《船舶原理》课程的学习,我们知道船舶的横摇运动方程可以表示为:式中,表示横摇角、横摇角速度、横摇角加速度;Ixx’表示船舶在水中的横摇惯性矩,等于船舶在空气中的横摇惯性矩Ixx 与船舶在水中的横摇附加惯性矩之和;N为阻尼力矩系数;D为排水重量;h为横稳性高度;αm0为有效波倾;ω为波浪圆频率。
引入横摇衰减系数γ和横摇固有(圆)频率ωФωФ2=Dh/Ixx’横摇运动方程可以写成:静水中自由横摇考虑船舶在初始时刻浮于静水面上,并伴有一个静横倾角φ0,但不受波浪的作用,该船舶随后将作自由横摇运动,其表达式可以写成式中,无因次衰减系数μ和相位超前角β为自由横摇幅值随时间成指数规律衰减,而横摇角随时间成余弦变化规律。
余弦函数的周期为2π,当每增加2π时,横摇完成一个摇摆,对应的时间间隔为自由横摇周期TФ’,即:ωФ’ TФ’=2π或上式中的表示水阻尼对横摇周期的影响,实际上阻尼对周期的影响很小。
若不考虑水的阻尼,则=0,式(6)对应的自由横摇周期即为横摇固有周期。
FPSO耐波性运动与液舱晃荡全耦合数值模拟-欢迎光临万德成教授研究
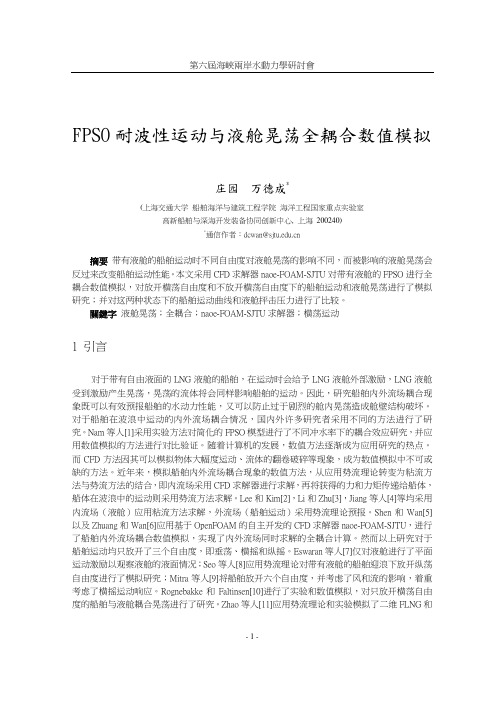
图3
释放横荡自由度下液舱自由面情况
-4-
第六屆海峽兩岸水動力學研討會
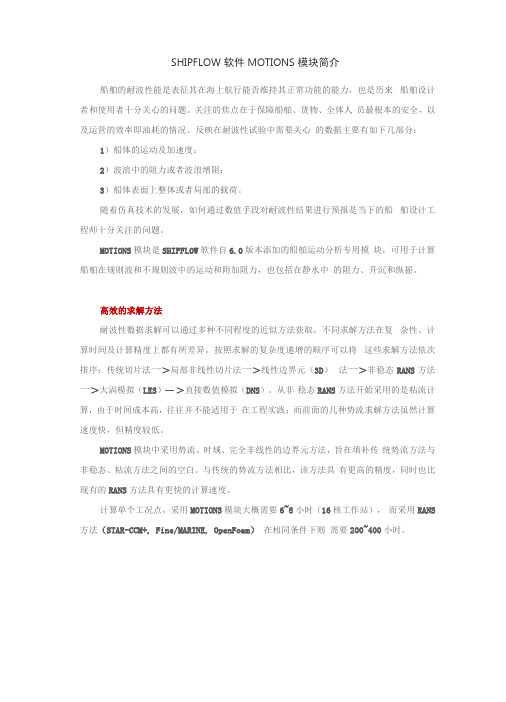
图4
液舱壁抨击压力点布置及压力时历曲线
同时为了分析液舱的减摇效应,我们考虑船舶所受力矩与液舱壁上的压力的时历曲线, 如图 5 右侧所示。图 5 中横摇力矩数值均放大了 50 倍。可以看出,作用在舱壁法向为坐标轴 正向的力出现在力矩使得船舶向坐标轴负向旋转的时刻,因此,在一定程度上使得船舶横摇 的角加速度减小,从而减少了横摇。因为液舱中孔道的存在,液舱内部与船体表面为一个整 体,因此船体所得到的力矩考虑到了液舱内流体对舱壁的压力而产生的力矩。如图 5 左侧所 示,可以看出,零冲水率下的船舶所受的横摇力矩最大,因为没有液舱中流体的存在给予减 摇;其次是放开横荡自由度下的横摇力矩,固定横荡自由度的横摇力矩最小。这也和图 2 中横 摇运动幅值相吻合。 而由图 2 可以看出,放开横荡后船舶横摇幅值增大,因此,我们观察船舶所受横摇力矩 与液舱压力的时历曲线,如图 6 所示。其中横摇力矩数值放大 33 倍。可以看出,在固定横荡 运动时,如图 6 左所示,第二组舱壁抨击压力对横摇力矩有明显的影响作用,且出现在与横摇 力矩方向相反的地方,阻碍横摇进一步增大;而第三组舱壁抨击压力亦出现在与横摇力矩方 向相反的地方,虽然数值没有第二组抨击压力大,但依然有阻碍横摇的作用;而当放开横荡 运动时,如图 6 右所示,第二组和第三组舱壁抨击压力均出现在与横摇力矩方向相同的地方, 即与固定横荡自由度相比,加剧了船体的横摇运动。
-1-
第六屆海峽兩岸水動力學研討會
液舱晃荡在放开横荡自由度下的液舱的非线性自由面,Nasar 等人[11]采用实验方法将液舱固 定在驳船中,放开横摇垂荡和横荡自由度,观察其耦合现象。这些研究均表明,水平面运动 将会对液舱产生激励,且会使液舱产生剧烈晃荡,并改变船舶运动性能。 本文基于 Zhuang 和 Wan[6]的研究基础上,放开横荡自由度,并与之前所做三自由度运动 情况进行对比,观察横荡与横摇、垂荡和纵摇耦合情况下船舶内外流场的耦合情况。同时检 测了舱内的抨击压力,并与三自由度下的液舱抨击压力进行对比,分析舱内流体晃荡情况。 最后通过比较船舶运动与抨击压力的相位差,分析液舱晃荡对于船舶的减摇作用。
耐波性预报的数值方法

耐波性预报的数值方法随着海洋气象学的发展,耐波性预报成为海洋气象学研究的热点之一,其涵盖的范围广泛,包括海上工程、近岸海域和内陆水域等。
耐波性预报主要用于确定海浪对于结构物的影响,其精度和准确度对于海洋结构物的设计和施工来说至关重要。
本文将介绍一种常用的耐波性预报数值方法:波浪谱法。
波浪谱法是一种通过数学模型预测海浪高度的方法。
它基于统计学原理,将海浪高度看作频率的随机变量,利用矩阵特征值问题将其转化为谱表示,从而通过计算海浪频带的谱成分来预报海浪的高度。
波浪谱法可以分为线性和非线性两种方法。
线性波浪谱法适用于海浪高度比较小的情况,其核心公式为:$S(f) = \frac{4\pi^2}{g^2}f^{-5}e^{-\frac{5}{4}(\frac{f_p}{f})^4}$其中,$S(f)$是波浪谱,$f$是频率,$f_p$是波峰频率,$g$是重力加速度。
该公式基于对于波浪动能的能量守恒假设,即使在一定程度上违反了实际水文情况的非线性效应,但其计算精度较高,在近岸海域和海上工程的预报中得到了广泛应用。
非线性波浪谱法适用于海浪高度较大的情况,其核心公式包括:$S(f) = A(f) \times \delta(f-f_p) + B(f), A(f) =\frac{5}{16}\frac{H_m^2}{f_p^4}\frac{e^{\frac{-5}{4}(\frac{f_p}{f})^4}}{f^5}$其中,$H_m$是波高标准差,$\delta(f-f_p)$是一个峰值函数,$B(f)$是定常波谱。
非线性波浪谱法计算过程较为繁琐,需要考虑多种非线性效应,如波浪不对称性、波浪剧烈变化和能量流失等,但其计算精度更高,能够更准确地预报海浪高度。
波浪谱法还有一种改进方法——时域法。
时域法将波浪谱分解成一系列时间域中的波浪组件,通过求解波浪运动方程确定波浪高度随时间的变化。
时域法计算复杂度较高,但它可以考虑更多的非线性效应和海浪的时变性,能够更准确地预报大浪和风浪耦合下的海浪高度。
SHIPFLOW软件MOTIONS模块简介
SHIPFLOW 软件MOTIONS模块简介船舶的耐波性能是表征其在海上航行能否维持其正常功能的能力,也是历来船舶设计者和使用者十分关心的问题。
关注的焦点在于保障船舶、货物、全体人员最根本的安全,以及运营的效率即油耗的情况。
反映在耐波性试验中需要关心的数据主要有如下几部分:1)船体的运动及加速度;2)波浪中的阻力或者波浪增阻;3)船体表面上整体或者局部的载荷。
随着仿真技术的发展,如何通过数值手段对耐波性结果进行预报是当下的船舶设计工程师十分关注的问题。
MOTIONS模块是SHIPFLOW软件自6.0版本添加的船舶运动分析专用模块,可用于计算船舶在规则波和不规则波中的运动和附加阻力,也包括在静水中的阻力、升沉和纵摇。
高效的求解方法耐波性数据求解可以通过多种不同程度的近似方法获取,不同求解方法在复杂性、计算时间及计算精度上都有所差异。
按照求解的复杂度递增的顺序可以将这些求解方法依次排序:传统切片法一>局部非线性切片法一>线性边界元(3D)法一>非稳态RANS方法一>大涡模拟(LES)—>直接数值模拟(DNS)。
从非稳态RANS方法开始采用的是粘流计算,由于时间成本高,往往并不能适用于在工程实践;而前面的几种势流求解方法虽然计算速度快,但精度较低。
MOTIONS模块中采用势流、时域、完全非线性的边界元方法,旨在填补传统势流方法与非稳态、粘流方法之间的空白。
与传统的势流方法相比,该方法具有更高的精度,同时也比现有的RANS方法具有更快的计算速度。
计算单个工况点,采用MOTIONS模块大概需要6~8小时(16核工作站),而采用RANS 方法(STAR-CCM+, Fine/MARINE, OpenFoam)在相同条件下则需要200~400小时。
条件 数值 航速[kn] 15.5 Fn 0.142浪向180°波长[Lambda/Lpp] 0.6, 0.7,…, 2.0 LCC2作为研究对象,对其波浪增阻进行计算,工况如下: 完善的功能MOTIONS 的计算域由一个自由液面及截断它的浮体组成,并具有如下特征: 1)假定计算域是一个更大的计算域的一部分;2)外部计算域是静水状态或是未受干扰的波浪流场状态。
舰船结构的耐波性能分析与优化设计

舰船结构的耐波性能分析与优化设计舰船结构的耐波性能是指舰船在海洋波浪环境下承受波浪载荷时的稳定性和安全性能。
耐波性能的分析与优化设计对于舰船的设计和建造具有重要意义。
本文将就舰船结构的耐波性能进行分析,并提出相应的优化设计方法。
1. 波浪载荷对舰船结构的影响波浪载荷是指充斥在舰船结构表面的波浪力,它对舰船结构的影响可表现为“浪荡力”和“迎浪力”。
浪荡力使得舰船产生横向和纵向的运动,而迎浪力则用于提供推进力。
2. 耐波性能分析方法2.1 线性理论分析线性理论是一种基本的理论模型,它假设波浪载荷与舰船的反应之间是线性关系。
通过线性理论分析,可以获得舰船在不同波浪条件下的波动响应和载荷分布。
2.2 非线性数值模拟非线性数值模拟是一种更加精确的耐波性能分析方法,它考虑了波浪载荷和舰船结构的非线性特性。
利用计算流体力学方法,可以模拟舰船在海上的真实工作环境,获得更准确的结果。
3. 耐波性能优化设计方法3.1 材料选择与强度优化在耐波性能优化设计中,选择合适的材料对于提高舰船结构的强度和刚度至关重要。
通过优化材料的特性,可以降低结构的振动幅值和应力,提高舰船的耐波性能。
3.2 结构形状优化结构形状对于舰船的耐波性能有着直接的影响。
通过优化结构的外形和布局,可以减小舰船与波浪的相互作用,降低波浪载荷和结构响应。
3.3 主动控制技术主动控制技术可以在一定程度上改善舰船的耐波性能。
通过采用合适的控制策略,如自适应控制和反馈控制,可以减小波浪力对舰船的影响,提高舰船的稳定性和操纵性能。
4. 耐波性能分析与优化设计案例以某型舰船为例,通过上述提到的耐波性能分析与优化设计方法,对舰船的结构进行分析和改进。
通过数值模拟和实际试验,获得了舰船在不同波浪条件下的耐波性能数据,并根据数据分析结果进行相应的结构优化设计。
5. 结论舰船结构的耐波性能是保证舰船在海上安全运行的重要因素。
本文通过分析耐波性能的影响因素,并介绍了线性理论分析和非线性数值模拟两种常用的分析方法。
船舶耐波性能及优化设计研究

船舶耐波性能及优化设计研究一、引言船舶耐波性能是衡量一艘船的重要指标之一,也是保障船舶海上安全的关键因素。
船舶在海上航行时,会面临各种波浪环境,船舶的耐波性能好坏决定了其航行的安全性和舒适性。
因此,研究船舶的耐波性能以及优化设计是一个具有重要意义的课题。
二、船舶耐波性能的影响因素船舶的耐波性能是由船体本身的设计和建造质量、船舶在海上的运动状态以及各种环境因素综合影响而形成的。
以下是影响船舶耐波性能的几个主要因素:1、船体结构设计船体结构设计是影响船舶耐波性能的最重要因素之一,它包括船体型面设计、船体尺寸比例、船舶结构强度等。
合理的船体结构设计有利于提高船舶的耐波性能。
2、载货量和船员配备随着船舶的载货量增大,船舶的大、小浪受力情况也会发生变化,会对船舶的耐波性能产生一定的影响。
而船员配备的多少也会影响船舶的艇身均衡状态和灵活性,从而影响船舶的耐波性能。
3、船舶在海上的运动状态船舶在海上的运动状态是受到风、浪、潮流等多种因素的综合影响而形成的,如航向、航速、波浪高度、波浪频率等。
这些因素会影响船舶的耐波性能。
4、波浪环境波浪环境是指船舶在海上遇到的波浪形态,包括波高、波浪频率、波浪周期等。
不同的波浪环境对船舶的耐波性能有不同的影响,需要对波浪环境进行全面的评估和分析。
三、优化船舶耐波性能的设计方法为了提高船舶的耐波性能,需要采取一些有效的优化设计方法。
以下是几种主要的设计方法:1、船体结构优化设计船体结构的优化设计可以通过数值模拟和实验测试两种方法来实现。
数值模拟主要利用计算机仿真技术分析和研究船体结构的力学性能,进行结构优化设计,实验测试则是通过对船舶模型进行真实的模拟试验,获取船体结构的力学特性数据。
2、锚泊安装和操纵策略优化对于大型船舶来说,锚泊安装和操纵策略的优化也是提高船舶的耐波性能的关键因素之一。
优化锚泊安装和操纵策略可以通过数值模拟和实验测试来实现。
3、减轻船舶载重量为了提高船舶的浮力和稳定性能,可以考虑减轻船舶的载重量。
基于数值方法的船舶纵向运动频域预报研究
基于数值方法的船舶纵向运动频域预报研究发表时间:2015-07-06T11:47:07.720Z 来源:《中国科技教育·理论版》2015年第5期供稿作者:潘文良刘可刁世伦[导读] 船舶在波浪中运动的耐波性研究,对船舶在海上的航行安全及武器使用,有着及其重要的作用。
潘文良刘可刁世伦 91550部队 116023 摘要船舶在海上的日常航行,不仅需要极短期的时域预报,也需要短期频域预报,而且还需要两者相结合的预报模式。
本文运用粘性流数值方法对WigleyIII型船模顶浪纵向运动进行了数值仿真,得到了船舶纵向摇荡的时历曲线,依据谱分析理论计算船舶摇荡谱,进而对船舶顶浪纵向运动进行频域预报。
预报结果同势流理论计算结果进行比对,效果良好。
关键词纵向运动频域预报数值仿真摇荡响应谱0引言船舶在波浪中运动的耐波性研究,对船舶在海上的航行安全及武器使用,有着及其重要的作用。
舰船在日常训练及战斗活动中,不仅需要极短期的时域预报,也需要短期频域预报,而且还需要两者相结合的预报模式。
舰船摇荡的频域预报,通常是基于舰船流体力学理论,采用概率统计方法给出预报。
本文主要是通过数值方法获取船舶摇荡的时历曲线,根据统计分析原理,对在长峰不规则波中顶浪纵向运动进行频域预报。
拓宽了船舶摇荡频域预报的新途径[1][2]。
1 船舶摇荡时历的获取本文通过粘性流方法对船舶纵向运动进行数值仿真计算的方法来获取船舶摇荡时历曲线,较好地克服了上述两种传统方法的缺点,同时提高了船舶摇荡时历的获取精度[3]。
1.1船模的选择本文选取WigleyIII型标准船模作为CFD数值模拟研究对象。
Wigley系列船模是用数学公式来表述型值的理想化船模。
若采用右手坐标系O,是纵向坐标,是横向坐标,向右舷为正,是垂向坐标,向下为正。
在此坐标系中,O点在船舯静水面上,无因次化的船型表达式为: (1)1.2网格划分粘性流数值水池试验中,网格划分的科学性和网格分布合理性对试验的精度和效率起着至关重要的作用。
基于三维势流理论的耐波性数值预报
基于三维势流理论的耐波性数值预报随着海洋工程事业的发展,对于浪尖高度、移动速度、滞留时间等海浪参数的准确预报愈加重要。
而海浪的复杂性,导致现阶段的描述方法难以满足实际需要。
本文将介绍一种基于三维势流理论的耐波性数值预报方法,并分析其在海洋工程中的应用。
三维势流理论是基于Bernoulli方程的理论,能够描述流体中复杂的运动,包括了流体的速度、压力和密度等参数,进而计算海浪的传播和变形。
在此理论下,我们可以通过求解海洋自由面上的流场,并根据动量守恒方程得到海洋波浪的传播方程。
本文所提供的数值预报方法,基于三维势流理论的基础上,利用有限元方法对其进行数值求解。
该方法具备一定的数值稳定性和精度,能够对复杂的海浪场进行预报,并为海洋工程提供可靠的模拟支持。
在预报过程中,我们可以根据实际需要选择不同的边界条件和初始条件,并通过预设网格使其适应不同的计算环境。
在求解过程中,我们需注意模型设置中的物理参数,包括海水密度、粘度、重力加速度等参数,以及模型中的阻力系数、回波系数等真实参数的设定,以确保预报结果的准确性和可靠性。
最终,基于三维势流理论的耐波性数值预报方法能够为海洋工程提供可靠且准确的波浪参数预报,包括浪高、周期、传播方向、波速等,进而对海洋工程的设计、施工和咨询提供重要参考依据。
预报结果的精度和可靠性,将在海岸防护、海上输油管道、港口码头、海上风电等领域的应用中得到验证。
海洋工程中需要预测的海浪参数包括浪高、周期、传播方向、波速等。
这些参数的准确预报对于海洋工程的设计、施工和咨询非常重要,因此需要通过数值模拟等方法进行计算和预测。
浪高是指波浪顶部相对于海平面的高度。
浪高受到多种因素的影响,包括风速、海洋流速度、水深等因素。
例如,在狂风暴雨的条件下,海浪往往会变得更加剧烈。
在海洋工程中,浪高的预报对于选择结构物的高度、决定摆放平台和绳索、决定船只的运行和供应等都非常重要。
周期是指波浪的时间周期,即相邻波峰和波谷之间的时间间隔。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
因为线性系统具有叠加性,所以系统收到不同 扰动产生的总响应可以用系统受到每个扰动产生的 响应值之和来表示,这样,船体摇荡的随机函数可 表示为
式中:l,=∞2/g=ktanh(kd);r=√(戈一f)2+(y一叼)2; R=√(戈一f)2+(Y一田)2+(z—f)2; R’= ̄/(菇一手)2+(Y一叼)2+(z+2d+f)2;pv为积分的
收稿日期:2012—10—15;修回日期:2012—11—02 作者简介:李宇辰(1988一),男,硕士研究生,研究方向为舰艇操纵理论与方法。
万方数据
第10期
李宇辰,等:耐波性预报的数值方法
・17・
取得了重大突破。从二维理论发展到三维理论, 从频域分析发展到时域分析,从线性假设发展到 非线性处理,船舶耐波性的预报范围不断扩大, 理论日趋成熟,尤其是随着高速化大容量计算机 的出现,三维流体动力的数值计算得到迅速的发 展。目前,用三维水动力理论求解辐射一绕射问 题一般采用自由格林函数法和简单格林函数法 (又称Rankine源方法口。)。该方法是在物面和自 由面上都分布奇点的一种计算方法,与自由面格 林函数方法相比,该方法在分布奇点计算上较为 简单,并可将自由面非线性和定常势的影响考虑 进去。Rankine源方法最先是在研究开尔文波和兴 波阻力时提出,之后Noblesse和Telste‘3-5]在满足 不同边界条件的格林函数的数值问题上,提出了 大量快速的计算方法。目前,基于频域格林函数 的边界元法已成为大型近海结构物设计过程中一 个标准计算工具。本文使用基于三维势流理论的 AQWA软件对方形系数为0.7的系列60船型进行 耐波性预报,并基于STF法的Seakeeper软件计算 结果和该船模型水池试验结果用作对比数据,计 算结果表明,基于AQWA的三维计算方法预报耐 波性精度高,适用性强。
万方数据
第10期
李宇辰,等:耐波性预报的数值方法
・19・
四边形单元,并且注意软件本身对网格质量的 要求:“。 计算时,船体模型的总重量、重心以及对重心 的惯性矩与实船应当一致。考虑到计算的速度和精 度,计算时划分的总网格数为505个,其中三角形 单元为32个,四边形单元为472个,质量点单元为 1个。其具体模型如图1所示。
Xiao・long,HAN Xiao—guang
Yu-chen,WU
Xi,YUAN
(Navy
Abstract:The theory.It is used
is
rare
Arms Commanding Academy,Guangzhou 5 1
0430,China)
was
AQWA,a
a
commercial hydrodynamic software,which
定到定常状态后的速度势,这部分速度势与时间 无关,把它从总速度势中分离出来其余的非定常 部分,记作西,(X,Y,z)。速度势的分解如下式 所示: 中(戈,Y,z)=西s(x,Y,z)+中r(x,Y,z), 式中:多。为定常势;西,为不定常势。 而不定常势西,又可以分解为人射波势、辐射 势和绕射势3部分,这样下面的表达式成立: f中r(戈,Y,z)=①J(戈,Y,z)+中月(x,Y,z)+ 函。(戈,Y,。), (1)
第35卷
不为:
G(Ⅵ,锘,毗)=去+专+
2p吐。面顽万(IX
21Ti
F+v瓦)e-"砑z
p+
(10)
式中:f。为波幅,将式(10)代入式(9)可)cosh弘(z+d)Jo(p7)d
ii‰c。s^尼(z+d)coshk(f+d)厶(kr)。(5)
关键词:
耐波性;AQWA;STF;三维势流理论
U661.32
中图分类号:
文献标识码:
A
文章编号:1672—7649(2013)10—0016—05 Numerical study
LI
doi:10.3404/j.issn.1672—7649.2013.10.004
on
the seakeeping prediction
1
船舶在波浪中的运动理论
基本条件 在波浪中航行时,船舶的运动响应计算广泛采
[孔告圹詈盱o,
.
1.1
(3)
[趴』》_0'z一^,
L
用三维势流理论‘61,其基本条件如下: 1)船体周围的流体是均匀、无粘性、无旋、 不可压缩的理想流体; 2)入射波为微幅规则波,即把入射波的波幅 和船体的运动作为一阶无穷小,在讨论问题时只保 留到一阶无穷小,略去二阶或更高阶的无穷小,寻 求问题的稳态解,此时可应用叠加原理; 3)考虑绕射和辐射的影响; 4)运动已持续了相当长的时间,已达稳态, 可用频域理论进行分析。 1.2三维流场中速度势的分解 根据线性假设,船舶在波浪中运动的流场速 度势可以按叠加原理分为定常势和不定常势2部 分。定常部分不考虑波浪影响,是船在静水中稳
J中,=Re(妒oel“), 1
o
(2)
l中一=Re{∑",e山‘), ”1
【痧D=Re(妒,e1“)。 式中:中,为入射势;中。为辐射势;少。为绕射势; 入射波势妒。为已知的;∞为波浪的遭遇频率;r/i为 第J个运动模式的运动复幅值;9j为第歹个运动模式 单位幅值的摇荡运动的速度势。 1.3速度势与流体力的求解 速度势所满足的条件如下式所示: [£]:V 29,=0,(,=1~7), [|s]:(V妒,一F)・/7,=0,(J=1~7),
a
AQWA
with those by Seakeeper which
based
was
on
those by experiment.As
result,it
indicates that the data of the motion response which
can
calculated by
to
AQWA
reasonablly reflected the seakeeping performance of series 60,SO that it
日l/3=2.00 ̄/moo,
,∞
(15)
(16)
巩。2
J0
Sr(w)doJ。
式中:胃。力为船舶各运动幅值的有义值;m。为响应 谱的0阶谱矩。
[一∞2(M+蝇(∞))-io以(to)+K]X(to)=F(w)。
(7)
2
数值计算方法
下面使用AQWA对方形系数为0.7的系列60
式中:M。为结构质量矩阵;M。为附加质量矩阵; C为线性阻尼矩阵;K为系统刚度矩阵;F(∞)为波 浪力。
(6)
(14)
式中:Is,(∞)为船舶运动的响应密度;l H(09)I 2为
响应幅值算子;S,(09)为波浪谱密度。 通过船舶运动响应谱密度可以求得各运动响应 的有义值:
在求得速度势后,船体表面的压力由线性化的 Bernouli方程表示,积分后可以得到作用于船体的流 体力。 1.4运动方程的建立 在随船平动的坐标系下,利用微幅、线性化的假 设条件,船舶在波浪中的运动响应X(∞)通过下面方程 得到:
第35卷第10期
2013年10月
舰船科学技术
SHIP SCIENCE AND TECHNOLOGY
V01.35,No.10 Oct,2013
耐波性预报的数值方法
李宇辰,吴 唏,袁小龙,韩晓光
(海军兵种指挥学院,广东广州510430) 摘
要: 基于三维势流理论的水动力商业软件AQWA用于多种浮式结构物在波浪上运动的分析。而在国内
妒(x,Y㈡=去Ⅱ祁(Ⅵ一亭mf)邯。(4)
式中:盯为源强;S为入水结构面,(石,Y,彳)为流 场中域点的坐标;(f,7/,g-)为S上源点的坐标;G 为格林函数,并且满足所有边界条件,G可表
万方数据
・18・
舰船科学技术 Y(t)为输出函数。 如果将波浪振荡用复数形式表示为 X(t)=f。e”‘,
V9j_0,z=一∞,
[R]:远离物面的自由面上的波向后传播。 式中:/7,为物面上点的广义法向量; [£]为控制
方程;[|s]为物面条件;[F]为线性化的自由表 面条件;[B]为底部条件;[R]为远方的辐射 条件。 辐射势妒i(,=1~6)和绕射势妒,可以通过三维 源汇分布理论,采用边界元法求解,一般的速度势 可表示为
structures
based
on
3-D potential flow
to
analyse
wide range of floating
moving in the waves.In
domestic,however,it
paper aims to
to
see
people calculating the motion response of ship by
大量事实证明,一艘在静水中航行性能优良的 船舶,在波浪中的航行性能并不一定优良¨j。由于 船舶实际上是经常航行在波涛汹涌的海面上,因此, 研究船舶在波浪上的运动越来越引起人们重视。总 体而言,船舶耐波性的指标包括横摇、纵荡、垂荡、 首摇、横荡、纵荡,以及特殊部位的位移、运动速 度、运动加速度、甲板上浪、首底碰击、螺旋桨出 水次数等运动响应的有义幅值的指标。预报这些指
can
AQWA,therefore,this
discuss
whether
AQWA
be used
to
predict the seakeeping performance of series
60(C6=0.7).At
was
the same STF and
time,compared
the
calculating results by
be applied
wave load
prediction. Key words: