船舶航海学汇总
(完整版)航海学基础知识

第三章 航向、方位和距离第一节 航海上常用的度量单位一、长度单位1.海里(nautical mile, n mile)1)定义海里等于地球椭圆子午线上纬度一分所对应的弧长简写为1n mile 或1'。
数学公式:1(1852.259.31cos 2)nmile m ϕ=-赤道最短,1842.9m ,两极最长,1861.6m ;两地最大差值是18.7m 。
2)标准海里英国为1853.18m(6080英尺);我国采用1929年国际水文地理学会议通过的海里标准,1n mile=1852m 。
约在纬度44º14'处1n mile 的长度才等于1852m3)航海实践中产生的误差例:某轮沿着赤道向正东航行,每小时25n mile ,航行一天后航程是2524=600n mile ⨯(按1n mile 等于1852m 计算),如果按赤道1 n mile 的实际长度1842.94m 计算,则船舶一天航行的距离是:1852600603n mile 1842.94⨯≈ 由此可以看出,将1n mile 确定为1852m 后,所产生的误差只有航行距离的0.5%。
若在中纬度海区航行,则所产生的误差将更小。
2.链(cable,cab)1n mile 的十分之一为1链。
链是用来测量较近距离的单位。
1链=185.2m3.米(meter,m)国际上通用的长度度量单位。
航海上用来表示海图里的山高和水深,有时也用来度量距离。
4.拓(fathom)、英尺(foot,ft)和码(yard,yd)旧英版海图上用英尺和拓表示水深;山高以英尺表示。
用海里、码和英尺来度量距离。
1拓=1.829m 或6 ft 、1yd=0.9144m 或3 ft 、1 ft=0.3048m 。
目前英版的拓制海图正被米制海图(metric chart)所代替5.公里(kilometer,km)用于海图上表示两个陆标间较远的距离单位。
1km=1000m。
二、速度单位节(knot,kn):航海上计算航速的单位。
航海学知识点
第一节航向与方位一、方向的确定、划分与换算1. 航海上方向的划分航海上常用的划分方向的方法有下列三种:(1)圆周法以正北为方向基准000°,按顺时针方向计量到正东为090°,正南为180°,正西为270°,再计量到正北方向为360°或000°。
圆周法始终用三位数表示,是航海上最常用的表示方向的方法。
(2)半圆法以正北或正南为方向基准,分别向东或向西计量到正南或正东,计量范围0°到180°。
用半圆法表示某方向时,除度数外,还应标明起算点和计量方向。
如:30°NE,150°SE,30°SW,150°NW。
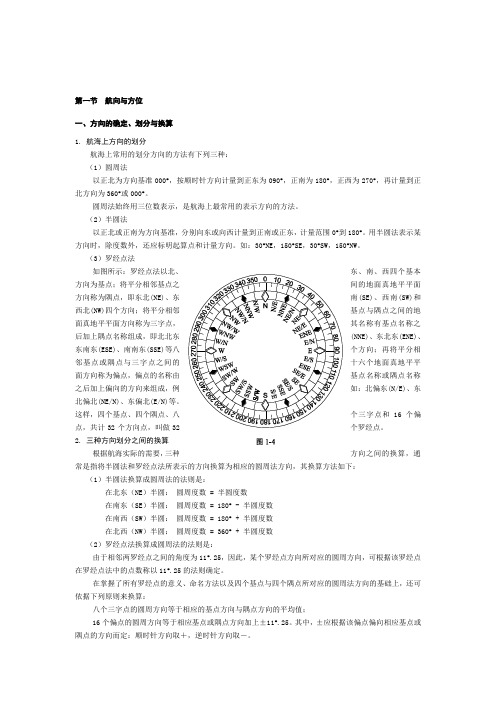
(3)罗经点法如图所示:罗经点法以北、东、南、西四个基本Array方向为基点;将平分相邻基点之间的地面真地平平面方向称为隅点,即东北(NE)、东南(SE)、西南(SW)和西北(NW)四个方向;将平分相邻基点与隅点之间的地面真地平平面方向称为三字点,其名称有基点名称之后加上隅点名称组成,即北北东(NNE)、东北东(ENE)、东南东(ESE)、南南东(SSE)等八个方向;再将平分相邻基点或隅点与三字点之间的十六个地面真地平平面方向称为偏点,偏点的名称由基点名称或隅点名称之后加上偏向的方向来组成,例如:北偏东(N/E)、东北偏北(NE/N)、东偏北(E/N)等。
这样,四个基点、四个隅点、八个三字点和16个偏点,共计32个方向点,叫做32个罗经点。
2. 三种方向划分之间的换算根据航海实际的需要,三种方向之间的换算,通常是指将半圆法和罗经点法所表示的方向换算为相应的圆周法方向,其换算方法如下:(1)半圆法换算成圆周法的法则是:在北东(NE)半圆:圆周度数 = 半圆度数在南东(SE)半圆:圆周度数 = 180° - 半圆度数在南西(SW)半圆:圆周度数 = 180° + 半圆度数在北西(NW)半圆:圆周度数 = 360° + 半圆度数(2)罗经点法换算成圆周法的法则是:由于相邻两罗经点之间的角度为11°.25,因此,某个罗经点方向所对应的圆周方向,可根据该罗经点在罗经点法中的点数称以11°.25的法则确定。
航海学知识点汇总
航海学知识点汇总航海,是人类探索和征服海洋的历史悠久和辉煌壮丽的篇章,也是人类社会发展史上重要的一页。
航海是指运用船舶等水上交通工具,在海上或者其他水域中进行商业、旅游、科考等活动。
对于航海爱好者来说,了解一些航海学的基本知识是非常重要的。
下面就为大家介绍一些航海学的知识点,让大家更加深入地了解航海学的世界。
一、船舶构造和稳性1、船舶的构造:船身由两部分组成,即上部建筑和船体(即船壳)。
船体包括船头、船底和船侧。
船舶的推进力是由发动机驱动螺旋桨产生的,螺旋桨和推进装置一般安装在船尾。
船舶的掌舵则是通过舵机等机械装置进行的。
2、船舶的稳性:船舶的稳性是指船舶在不同浮动状态下的稳定性能。
稳定性是指船舶在受到外力作用时,能保持稳定的能力。
船舶的稳定性可以通过以下几种参数来衡量:重心高度、艏甲板高度、纵倾周期、横倾周期、稳性保证系数等。
二、导航术中的基本概念1、导航物:导航物是指能够用来导航的信标、灯塔、岛屿、海岸线等。
导航物可以区分无特征和有特征的导航物,无特征的导航物是常见的灯塔或水手以及遥测设备等,而有特征的导航物则是特殊的地貌或者标志,通常用来标记海域的危险区域或边界。
2、航向:航向是指船舶航行时相对于地球表面的方向,以正北方向为基准。
航向可以通过舰桥的船首向标、罗盘读数等方式得到。
3、航迹:航迹是指船舶航行过程中的实际轨迹。
航迹可以通过航线等方式得到。
4、船速:船速是指船舶在航行过程中的速度,可以通过船速表等仪器得到。
三、海洋气象1、气压系统:气压系统是导致气象变化的重要因素,通常由高压系统、低压系统和锋面构成。
高压系统通常代表干燥、晴朗和温暖的气候,而低压系统则代表雨、雪、风暴等天气。
锋面则代表了气压的变化区。
2、风向和风速:风向和风速是指风的方向和力度。
风一般会影响海洋的浪高、波向和潮汐。
风向和风速可以通过气象图、风速仪等形式得到。
3、浪高和周期:浪高和周期是指海浪高度和波动周期,通常由风速、浪向、水深等因素影响。
航海学(一)复习要点
第一篇基础知识第一章坐标、方向和距离1.名词解释:经度、纬度、经差、纬差、磁差、自差、罗经差、陀罗经差、真方位、磁方位、罗方位、陀螺方位、真航向、磁航向、罗航向、陀螺航向、舷角、海里、灯光初显2.地理坐标系采用的基本大圆(地理坐标系是建立在地球椭圆体上的坐标系3.经差、纬差计算和命名方法4.表示地球椭圆体形状和大小的参数有哪一些5.航海中为了简化计算对地球的形状采用圆球体、精确计算时采用椭圆体。
6.航海中目前使用的划分方向的方法有哪一些7.圆周法、半圆法、罗经点法换算8.磁差变化与哪一些因素有关9.自差变化与哪一些因素有关10.磁差资料的查取11.向位换算12.1海里的长度计算公式13.求地理能见距和初现距离14.中、英版图注射程15.求计程仪航程、计程仪改正率和到达点计程仪读数的计算16.相对计程仪“计风不计流”的概念17.航速校验线必备的条件18.不同水流条件下测定船速和计程仪改正率的方法第二章海图1.名词解释:恒向线、纬度渐长率、基准比例尺2.墨卡托海图采用的投影方法3.墨卡托海图的特点4.大圆海图的特点和投影方法5.重要海图图式6.中、英版海图上山高、灯高、比高、净空高度、水深采用的基本面7.英版海图上PA、PD、ED的含义8.如何判定海图的可靠程度第二篇船舶定位第一章航迹绘算1.名词解释:东西距2.风压差的大小与哪一些因素有关3.风压差确定正负号的方法4.风压差计算公式5.压差角的测定(重点是最小距离方位和正横方位法)6.中分纬度航法的计算7.海图作业试行规则中对航迹推算的规定(连续不间断,只有通过狭水道、渔区可中断。
水流显著的海区一小时一个船位,其他海区2-4小时一个船位8.无风流情况下,推算船位的误差产生的原因有哪一些?正常情况下,航向误差和航程误差各为多少?概率园的半径是多少?第二章陆标定位1.名词解释:船位差2.航海中常用的船位线有哪几种3.说出3种距离定位时判定双值性的方法4.距离定位时观测物标的顺序5.方位定位时观测物标的顺序和选择物标的原则6.三标方位定位时产生误差三角形的原因及处理方法7.倍角法、四点方位法、特殊角法定位的条件8.方位移线定位注意事项第三篇航行方法第一章大洋航行1.航线有哪几种类型2.大圆航线分段的原则3.选择大圆航线时应避开哪一些航行受限制的区域4.选择大圆航线时应考虑哪一些因素5.空白定位图有哪一些特点第二章沿岸航行1. 选择沿岸航线时应考虑哪一些因素2. 选择沿岸航线时,确定航线离岸距离时应考虑哪一些因素(一般数据)3.选择沿岸航线时,确定航线离危险物距离时应考虑哪一些因素第三章狭水道航行1.确定富裕水深大小时应考虑哪一些因素2.通过浅滩的有利时机高潮前一小时3.判定前方浮标是否有碰撞危险的方法4. 狭水道航行可以采用的导航方法、转向方法、避险方法有哪一些5.试述白天判定浅水礁盘存在的方法6. 试述平行方位转向法7.利用叠标导航修正航向的方法8.利用导标导航修正航向的方法第四章特殊条件下的航行1.雾中航行逐点航法的优缺点2. 雾中航行注意事项3.冰区航行注意事项4.利用雾号回声判定船与海岸距离的方法。
航海学知识点汇总学习资料
航海学知识点汇总航海学知识点汇总第一章航海学基础知识1. 大地球体:大地水准面围成的球体2. 大地球体两个近似体:椭圆体(进行精度较高计算如定义地理坐标和制作墨卡托海图);圆球体(简易计算如大圆航线和简易墨卡托海图)3. 地理坐标:基准线是格林经线、纬线经度:由格林经线向东或向西到该点经线,范围(0 —180);纬度:某点在地球椭圆子午线上的法线与赤道面交角,范围(0—90)4. 经差、纬差(范围都为0 —180);到达点相对于起航点的方向;D© =© 2-0 1 D入=入2-入1 N/E为正号S/W取负号;结果为正为N/E,为负则为S/W;注意如果得出经差大于180,则用360减去其绝对值,然后符号更换。
5. 关于赤道、地轴和球心对称问题(关于地心对称纬度等值反向,经度相差180° )6. 关于不同坐标系修正问题:同名相加、异名相减,结果如果为负名称与原来相反。
GPS坐标系左边原点在地心。
7. 方向的确定:方向是在测者地面真地平平面上确定的。
测者子午圈与测者地面真地平的交线为南北线,测者卯酉圈(东西圈)与测者地面真地平平面交线为东西线。
方向的三种表示法,要会换算。
(圆周、半圆周、罗经点)一个罗经点11.25°。
8. 圆周法是以真北为起点顺时针0-360。
,半圆法是以北或南为起点顺时针或逆时针0180 °;换算时最好用作图法比较直观。
9. 理解真航向(真北到航向线);真方位(真北到方位线);舷角(航向线到方位线,两种表示法)所以真方位和相对方位(舷角)只是起算点不同,目的点相同,只是相差了真北到航向线的角度,即真航向。
要会换算:TB=TC+Q 或TB=TC+Q右正左负),具体计算既可以用公式也可以用作图法解决(分别以测者和目标为中心做坐标系,连接测者与目标为方位线,便可一目了然。
10. 罗经向位换算:罗经差:罗航向与真北夹角;陀螺差:陀螺北与真北夹角;磁差:磁北与真北夹角,与时间、地区及地磁异常有关;自差:罗北与磁北夹角,与航向、船磁及磁暴有关;TC/GC/MC/CC之间换算要掌握TC=GC+X G=CC+A C=MC+VAR;MC=CC+DEV 11. 关于磁差:航用海图、小比例尺海图、港泊图分别在罗经花、磁差曲线、和海图标题栏给出。
航海学知识点汇总

航海学知识点汇总一、航海基础知识1、地球形状和地理坐标11 地球的形状和大小12 地理坐标的概念和表示方法13 经纬度的度量和换算2、航向和方位21 航向的定义和表示22 方位的概念和种类(真方位、磁方位、罗方位)23 航向和方位的换算关系3、海图31 海图的种类和用途32 海图比例尺和投影方式33 海图上的符号和注记4、航海仪器41 罗盘(磁罗经和电罗经)42 测深仪43 计程仪44 定位系统(GPS、北斗等)二、航海气象1、气象要素11 气温和气压12 风13 湿度和能见度14 云2、天气系统21 气旋和反气旋22 锋面23 台风(飓风)3、海洋气象预报31 预报的来源和获取途径32 预报内容的解读和应用三、船舶运动性能1、船舶浮性和稳性11 浮性原理12 稳性的分类和影响因素2、船舶阻力和推进21 阻力的种类和计算22 推进装置的工作原理和性能3、船舶操纵性31 操纵性指标32 影响操纵性的因素33 船舶的转向和避让四、航线设计与规划1、航线设计的原则和考虑因素11 安全因素12 经济因素13 气象和海况条件2、航线的拟定方法21 利用海图和航海资料22 参考以往的航行经验3、大圆航线和恒向线航线31 大圆航线的计算和应用32 恒向线航线的特点和使用场景五、船舶定位与导航1、天文定位11 太阳定位12 恒星定位2、陆标定位21 方位定位22 距离定位23 综合定位3、电子导航31 雷达导航32 AIS 系统的应用六、航海安全与法规1、国际海上避碰规则11 各类船舶的避让责任和行动12 号灯、号型和声号的使用2、海上交通安全法规21 船舶的适航要求22 船员的职责和资格3、应急处置31 船舶遇险的信号和报告32 火灾、碰撞等紧急情况的处理措施七、航海通信1、通信设备和方式11 甚高频(VHF)通信12 卫星通信13 莫尔斯电码通信2、通信程序和规范21 遇险通信22 日常通信的礼仪和格式八、海洋环境与保护1、海洋生态系统11 海洋生物多样性12 海洋生态平衡的重要性2、海洋污染防治21 油污、垃圾等污染物的来源和危害22 防止海洋污染的措施和法规以上是航海学的主要知识点汇总,通过对这些知识点的学习和掌握,可以为航海实践提供坚实的理论基础。
航海科普船舶知识点总结

航海科普船舶知识点总结船舶是人类在水上交通工具中最重要的一种,它是连接世界各地的重要交通工具,承担着货物运输、人员转移、海上探测等重要任务。
船舶的种类繁多,形态各异,而且船舶的各项参数和技术性能都各有不同,因此掌握船舶的相关知识对于从事航海行业的人来说是至关重要的。
本文将针对船舶的主要知识点进行总结,希望能够帮助读者加深对船舶的了解。
一、船舶的基本分类船舶根据其用途和建造材料的不同,可以分为多种类型。
根据用途的不同,船舶可以划分为货船、客船、军舰、渔船、科学研究船等等。
根据建造材料的不同,船舶可以分为木质船、钢铁船、铝合金船、玻璃钢船等等。
此外,船舶还可以根据其船型的不同进行分类,主要有平底船、平底船、广泛船等。
二、船舶的主要构造一艘船舶主要由船体、主机、动力系统、船舶装置等部分组成。
船体是船舶的骨架,它由船体骨架、船体外壳、船舱、甲板等部分组成。
主机是船舶的动力装置,它由主机本体、传动系统、改速器、推进装置等部分组成。
动力系统是船舶的能源装置,它由发电机、蓄电池、燃油系统等部分组成。
船舶装置是船舶的各种需要的部分,包括船舶驾驶系统、导航系统、通信系统、船舶辅助设备等。
三、船舶的主要性能参数船舶的主要性能参数包括船舶的吨位、船舶的速度、船舶的排水量、船舶的载重量、船舶的航速等。
船舶的吨位是指船舶的总重量,它是衡量船舶大小的重要参数。
船舶的速度是指船舶在航行状态下的移动速度,它是衡量船舶性能的重要参数。
船舶的排水量是指船舶在水中的排水量,它是衡量船舶浮力的重要参数。
船舶的载重量是指船舶所能承载的最大货物重量,它是衡量船舶运载能力的重要参数。
船舶的航速是指船舶在航行状态下的最高速度,它是衡量船舶行驶能力的重要参数。
四、船舶的驾驶和导航一艘船舶的驾驶和导航是非常复杂的,它需要船员具备丰富的航海知识和丰富的航海经验。
船舶的驾驶和导航主要包括航向控制、速度控制、位置控制、航线规划等。
航向控制是指船舶在航行状态下保持良好的航向,它需要通过船舶的舵机和操纵系统来实现。
航海船舶知识点总结
航海船舶知识点总结航海船舶是指用于航海和海上运输的各类船舶,包括货船、客船、油轮、拖船等。
船舶的航海能力和安全性对于海上运输至关重要,因此航海船舶知识是船舶管理人员和船员们必须具备的基本技能。
本文将分别从船舶类型、航海知识、船舶安全、船舶管理等方面对航海船舶知识点进行总结。
一、船舶类型船舶的类型多种多样,不同类型的船舶有不同的用途和特点。
根据用途和结构特点,船舶可以分为以下几类:1. 货船:主要用于货物运输,包括散货船、集装箱船、油轮等。
2. 客船:主要用于旅客运输,包括客运轮、邮轮等。
3. 拖船:主要用于拖曳其他船舶,帮助船舶进出港口等。
4. 渔船:主要用于捕捞渔获,包括拖网渔船、刺网渔船等。
5. 军舰:主要用于军事用途,包括驱逐舰、航空母舰、潜艇等。
不同类型的船舶有不同的航海要求和特点,船舶管理人员和船员们需要根据具体情况进行相应的航海准备和操作。
二、航海知识航海知识是航海船舶领域的基础知识,包括导航、海图、气象、潮汐等方面的知识。
下面分别介绍这些方面的知识点:1. 导航知识:导航是航海中最基本和重要的技能之一,它包括航向、航速、航程、航线等方面的知识。
船舶的航行需要依赖导航设备和导航仪表来确定航向和航程,并且需要不断修正航向和航程,确保航行安全。
2. 海图知识:海图是航海中必不可少的工具,它包括水深、航道、航标、海岛等海上信息,对于船舶的安全航行至关重要。
船舶管理人员和船员需要掌握海图的使用方法和解读技巧,确保航行的安全和顺利。
3. 气象知识:气象是航海中需要重点关注的因素之一,它包括风速、风向、气压、天气等方面的知识。
船舶管理人员和船员需要根据气象信息来调整航行计划和航行策略,确保航行的安全和顺利。
4. 潮汐知识:潮汐是海洋中不可忽视的因素,它包括潮水的涨落、潮汐的周期和规律等方面的知识。
船舶需要根据潮汐情况来确定靠港时间和潮流方向,确保航行安全和顺利。
航海知识是航海船舶领域的基础知识,船舶管理人员和船员们需要不断学习和积累这些知识,以提高航海水平和保障航行安全。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《航海学》实验指导书孙珽编广东海洋大学航海学院二00七年五月目录《航海学》实验指导书 (1)孙珽编 (1)广东海洋大学航海学院 (1)二00七年五月 (1)目录 (2)实验一海图识读 (3)实验二、航迹绘算 (4)实验三、船舶航行综合定位 (5)实验四、六分仪的结构、使用、读数方法及误差 (7)实验五、利用各种方法测罗经差 (8)实验六、中国沿海《航标表》和英版《灯标表》 (9)实验七、英版《海图及其它水道图书总目录》 (10)实验八、使用航海通告及保持海图有效性 (11)附录:实验报告纸 (13)实验一海图识读一、实验目的海图是以海洋及其毗邻的陆地为描述对象的地图,是航海专用地图。
通过实验,学生了解海图的特点,熟悉海图的编排,熟悉海图图式,能够正确的判断海图中所包含的信息,并能够正确使用海图作图工具。
二、实验设备海图13170、3706,中英版海图图式,航海三角板一套,航海平行尺一副,分规一个,软质铅笔及橡皮等海图作业工具。
三、实验准备学生认真复习《航海学》教材中第44-57页,认真阅读教材中图式,熟悉和掌握主要的符号和缩写的含义。
四、实验内容1.海图作业工具的使用1.1 航海平行尺作用:在进行海图作业时,用于绘画方位线或航向线、量取方位线度数或航向线度数。
使用方法:两只手各持一把尺的炳,交替平行移动。
在移动操作时,一只手适力压住静尺,另一只手推动动尺,两尺交替平行移动,直至要求位置。
交替移动过程中,防止静尺移位。
航海平行尺还可以利用平行尺的20cm刻度作为中心点度量角度。
1.2航海三角板作用:航海三角板的作用与平行尺的作用相同。
使用方法:船上都配有两只同规格的航海三角板。
根据不同情况,可单独使用或两只配合使用。
在应用中,航海三角板比平行尺方便、灵活。
特别是在量取的方位线或航向线度数,但又与海图上的罗经花距离较远时,使用航海三角板量取方位线或航向线的度数就更为方便。
具体操作时,用一只三角板的长边对准所要量取的方位线或航向线,然后与另一只三角板配合,将对准方位线或航向线的长边平行移到就近的经度线上,使圆弧的中心点与经度线相重合,最后从圆弧刻度尺上读取方位或航向度数。
在这种情况下,使用平行尺,则需要平行移动较远的距离才能到罗经花上,操作不慎,静尺容易移位而产生误差。
1.3 分规作用:利用分规在海图上量取距离或航程。
使用方法:海图作业所用的分规,一般都是铜质大分规,两个脚针不宜太尖锋。
尽量不用制图用的分规,可到厂家专门定制。
在量取距离或经纬度时,不宜太用力,分规应与海图平面有一个倾斜角度,轻用力操作,防止脚针剌破海图。
2.海图识读2.1 海图标题栏与海图图廓注记根据教材的内容,对照相应的海图,熟悉海图标题栏与海图图廓注记。
2.2海图图式的识别根据教材的内容,对照相应的海图,熟悉各种海图图式五、实验报告对于海图工具和海图的识读有个全面的了解,能够针对重要的海图图式了解含义。
熟悉海图的编排,了解海图图式,合理使用海图作图工具实验二、航迹绘算一、实验目的航迹绘算法,即海图作业法。
航迹推算,由于受风流等因素的影响,船位精度不如观测船位高,但它是其它定位方法的参照基础。
二、实验设备海图13170、3706,航海三角板一套,航海平行尺一副,分规一个,软质铅笔及橡皮等海图作业工具。
三、实验准备学生认真复习《航海学》教材中第65-70页,认真阅读教材中内容。
认真阅读中华人民共和国交通部《海图作业试行规则》。
四、实验内容1. 根据教材中无风流和有风流下航迹绘算的内容,进行航迹绘算。
2. 船位标注2.1 无论是推算船位,还是观测船位,都要以分数式标出船位的时间和计程仪航程。
时间为分子并用四位数表示,精确度到分;分母为计程仪行程,精确到0.1ˊ;分数线与纬度线平行或横廓线平行,这一分数式标注在船位附近。
2.2 船位标注符号:推算船位标注符号是在航迹线上垂直画一段短线,如+—;陆标定位标注符号为“⊙”;其它方法观测的船位标注符号同样按规范符号进行标注。
3.航向标注3.1 标注位置:把所要求的内容应标注在计划航迹线上。
3.2 标注内容:计划航向CA、陀罗或磁罗经航向,即GC或CC。
括号内应标注陀罗或磁罗经差,即ΔG或ΔC、风压差α、流压差β或风流压差γ。
3.3 标注顺序:①计划航向CA;②陀(磁)罗经航向GC(CC);③小括号内填写内容是:(ΔG或ΔC,α,β或γ)。
如果航向线太短,无法标注时,可在航向线附近画一条与横廓线平行的线上标注相同的内容,然后用箭头指示(箭头不要与航向线相接)3.4 标注内容以缩写代号和度数表示,航向用三位数字标出。
五、实验报告1.某轮航行进入东海,0600推算船位为A:30°51′.0N,122°15′.0E。
计划航向为080°,△G = +1°,计程仪0600读数L为80′.0,计程仪航速V L=12节,△L = +5%,受西风影响,α为5°,受流影响,流向170°,流速3节,求0700推算船位,GC?风流影响不变,过猫山正横处,航向转至010°,计程仪航速V L=13节,求转向时的转向点经纬度以及时间?2.某轮航行,1900推算船位为A:30°55′.0N,122°25′.0E。
此时计程仪读数L为100′.3,△L = +5%,计程仪航速V L=12节,采用GC=041°,△G= —1°,东风5级,α为3°,流180°—4kn,1940此时转向,驶往目的点B:31°08′.0N,122°33′.0E,1940后,东风5级,α为4°,流180°—4kn,转向后计程仪航速V L=13节。
求:1940推算船位;1940后采用的GC;求驶达终点B的时刻?做完以上练习题后,请在实验报告纸上详细的说明实验步骤和实验数据。
实验三、船舶航行综合定位一、实验目的运用所学地文航海理论,掌握在各种条件的船舶定位。
掌握方位定位、距离定位、移线定位等方法的综合使用。
二、实验设备海图13170、3706,航海三角板一套,航海平行尺一副,分规一个,软质铅笔及橡皮等海图作业工具。
三、实验准备学生认真复习《航海学》教材中第65-70页,《航海学》教材中第79-99页,复习上次实验的注意事项,认真阅读教材中内容。
认真阅读中华人民共和国交通部《海图作业试行规则》。
四、实验内容1. 陆标定位方法及注意事项(1)单物标方位移线定位。
(2)单物标方位、距离定位(目前都是用雷达进行方位距离定位)。
(3)两个物标两方位定位。
(4)三个物标三方位定位。
(5)观测物标方位时,应先观测船头或船尾方向,方位角变化较慢的物标,后观测正横方向的物标。
(6)观测角通常在30°<θ<150°为宜。
(7)选择距离较近的物标。
(8)方位换算:物标真方位TB=陀罗经方位GB+陀罗经差△G。
磁罗经方位CB+磁罗经差△C。
以上定位方法具体方法详见教材2. 物标最小距离方位与正横方位差根据所学理论,物标最小距离方位:右舷物标为+B Dmin=CA±90°左舷物标为—物标的正横方位:右正横为+B⊥═TC±90°左正横为-正确运用以上理论,熟练掌握正横距离和最近距离的区别。
3.根据所学的地文航海的理论,合理利用各种方法进行船舶的综合定位。
五、实验报告1.某轮航行,0800推算船位为A:09°07′.5S,115°38′.0E。
此时计程仪读数L为80′.0,△L = +5%,计程仪航速V L=10节,采用GC=011°,△G= —1°,北风5级,α为3°,流向NW,流速2kn,求0900推算船位?此时船舶测得某岛灯塔灯标(T.sedihing):0900 GB315°,D为6′;0910:GB300°;0920:GB280°.在风流情况不变的情况下,求0900船位差?经船长同意,从0900起,船位改为该时刻观测船位,照此航向继续航行,求到1040的推算船位?2.某轮航行,0900推算船位为A:09°05′.0S,116°04′.0E。
此时计程仪读数L 为120′.0,△L = +5%,计程仪航速V L=10节,采用GC=085°,△G= —3°,南风3级,α为3°,流SE—3kn,求1000推算船位?船舶过灯标(T.Burgkulan)正横GC转向至045°,求转向点时间,位置?转向后,南风3级,α为3°,流135°—3kn,转向后计程仪航速V L=13节。
求距离灯塔(T.Burgkulan)最近时的测得距该灯塔距离和方位以及时间?3.05年12月,海区微风,能见度良好,某船眼高e =7m,吃水8m,△G=2°E,本船计程仪航速V L= 12Kn,0800船位8°41ˊ.0S,115°42ˊ.0E,CA = 022°,流ENE —3Kn。
此时计程仪读数L为80′.0。
求:⑴发现P.Trewangan灯塔(8°21ˊ.0S,116°01ˊ.5E)灯光的最远距离和时刻;⑵P.Trewangan灯塔正横距离、正横时刻;⑶正横改向GC 090°流向000°—3kn,转向后计程仪航速V L=13节,1100船位。
做完以上练习题后,请在实验报告纸上详细的说明实验步骤和实验数据实验四、六分仪的结构、使用、读数方法及误差一、实验目的运用所学理论,掌握六分仪的使用二、实验设备航海六分仪三、实验准备学生认真复习《航海学》教材中第177-182页,熟悉六分仪的结构,熟悉六分仪各部件名称、读数的读取;动镜差、定镜差、指标差的测定;太阳高度观测方法四、实验内容1.熟悉六分仪各部件名称。
2.将六分仪指标杆随意转到一个位置读取读数,并请指导教师检查,同时注意主弧上读数为正;余弧上读数为负,并且分和分的小数读取后应用60来减,其差为负的分和分的小数。
3.六分仪的检查和校正。
详见教材1794.太阳高度观测方法指标杆放在0°,加好滤光片,对准太阳保持垂直。
慢慢外移指标杆,保持太阳在视野中。
接近水天线时(或模拟水线),去掉定镜前滤光片,否则看不见水天线。
轻轻摆动六分仪、可见太阳移动的弧线,同时要稍微改变面对方向使望远镜中心对准圆弧最低点,然后,转动鼓轮,上午应将太阳下边与水线重叠少许,下午则将太阳下边拉到水线上方少许,最后等待相切。
“大摆找切线,小摆找切点,微摆等相切”五、实验报告1.利用太阳测定六分仪指标差2. 观测太阳高度通过以上实测,能够熟练使用六分仪。