施耐德LXM15伺服的CANOPEN控制
Twido与LXM05A的Canopen通讯(点到点、寻原点、JOG)

Twido与LXM05A的Canopen通讯(点到点、寻原点、JOG)Twido与Lexium05A的CANopen通信——CANopen通信控制点到点定位、寻原点、JOG前言施耐德公司的Lexium05A系列伺服驱动器支持Canopen总线技术,可与Twido、Primium、M340 PLC等主站实现Canopen总线通讯,完成点到点定位、寻原点、JOG等功能。
本文以一个解决方案为例,简要介绍Twido PLC与Lexium 05A之间CANopen通信的过程,包括硬件接线、参数设置、硬软件组态、PLC编程等。
OEM PAE 王晓军目录1 设备及方案简述 (3)1.1 设备图 (3)1.2 控制图 (3)2 CANopen硬件连接 (3)2.1 连接说明 (4)2.2 备注: (5)3 伺服的接线 (5)3.1 CANopen接线 (5)3.2 CN1、CN3、及抱闸的接线 (7)4 参数设置(PLC、伺服) (8)4.1 伺服主要参数的设置(工作台Y轴) (8)4.2 伺服主要参数的设置(刀架X轴) (9)4.3 PLC CANopen组态 (10)4.3.1 CANopen 模块配置、EDS文件导入 (10)4.3.2 PDO 组态 (12)5 编程(以Y轴为例) (14)5.1 初始化OK后,伺服加上使能,并保持常通 (14)5.2 寻原点 (14)5.2.1 写寻原点模式 (14)5.2.2 读寻原点模式 (15)5.2.3 确定寻原点模式是否成功写入伺服,若没有则再写 (15)5.2.4 写寻原点方式(本例向负限位) (16)5.2.5 开始寻原点 (16)5.2.6 判断寻原点是否完成 (17)5.3 点到点 (17)5.3.1 写点到点定位模式 (17)5.3.2 读模式 (18)5.3.3 确认点到点定位模式是否成功写入,若没有则再写 (18)5.3.4 将目标位置、移动速度赋给驱动器 (19)5.3.5 延时一定时间,本例为0.5S(否则,定位的移动速度会按照上次的速度运行),触发控制字开始绝对定位 (19)5.3.6 判断定位是否完成 (20)5.4 JOG (20)5.4.1 写点动模式 (20)5.4.2 正、反向点动 (21)5.4.3 点动结束(停止) (21)6 参考文献 (22)1 设备及方案简述1.1 设备图1.2控制图CANopen BUSHMITWDLCAA40DRF+TWDNCO1MLEXIUM05A (刀架)LEXIUM05A (工作台)ATV31(带锯)2 CANopen 硬件连接2.1 连接说明2.2 备注:不同CANopen干线的区分3伺服的接线3.1 CANopen接线Lexium05A伺服驱动器上的CANopen接口共有两个,分别位于CN1和CN4 口上,可选择使用其中一个,如下图。
CANopen手册

33004206 05/2010
5
请注意
电气设备的安装、操作、维修和维护工作仅限于合格人员执行。对于使用本资料所 引发的任何后果, Schneider Electric 概不负责。
专业人员是指掌握与电气设备的制造和操作相关的技能和知识的人员,他们经过安 全培训能够发现和避免相关的危险。
6
33004206 05/2010
不遵守此信息可能导致人身伤害或设备损坏。
软件或认可的软件,则可
? 2010 Schneider Electric 。保留所有权利。
2
33004206 05/2010
目录
安全信息 . . . . . . . . . . . . . . . . . . . . . .
5
关于本书 . . . . . . . . . . . . . . . . . . . . . .
7
章 1 CANopen 介绍 . . . . . . . . . . . . . . . . . . .
9
CANopen 原理 . . . . . . . . . . . . . . . . . . . . . . . . .
9
章 2 CANopen 网络拓扑 . . . . . . . . . . . . . . . . .
37
SUB-D 9 电缆连接器 . . . . . . . . . . . . . . . . . . . . . . .
38
开放式电缆连接器 . . . . . . . . . . . . . . . . . . . . . . . .
41
IP67 M12 电缆连接器 . . . . . . . . . . . . . . . . . . . . . .
施耐德_伺服驱动器__伺服电机选型手册

Lexium 23 Plus SET UP 提供强大的示波器功能,可以采用两种模式: b 快速滤波:用于实时检测测量值的变化。 b 精确滤波:用于捕捉应用中的一个非常精确的时刻。此功能在显示信息之前记录 所有的信息,可以用于更精确地调谐。
3
选型指导
Lexium 23 Plus 运动控制
BCH 伺服电机
机器类型 传送装置 包装机械 印刷机械 抓取放置 X-Y 工作台 压铸机 装配机械 PCB 钻孔机 试验机 标签印刷机 横编机、绣花机 物料搬运 特殊机械 收 / 放卷 辊筒驱动
超低惯量
低惯量
中惯量
高惯量
4
选型指导
Lexium 23 Plus 运动控制
BCH 伺服电机和
Lexium 23 Plus 伺服驱动器的组合
0.1
0.037
0.32
0.96
5000
3000
LXM23pU01M3X BCH0401Op2p1C
电机惯量 类型
超低惯量
0.2
0.177
0.64
1.92
5000
3000
LXM23pU02M3X BCH0601Op2p1C 超低惯量
0.3
8.17
2.86
8.59
2000
1000
LXM23pU04M3X BCH1301Mp2p1C 中惯量
v 制动电阻. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 v 电机启动器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
canopen控制伺服原理
canopen控制伺服原理CANopen是一种用于控制伺服系统的通信协议,它基于CAN总线技术,具有高效、可靠的特点。
本文将介绍CANopen控制伺服的原理。
CANopen协议是一种开放的通信协议,它定义了伺服系统中各个设备之间的通信规则和数据格式。
通过CAN总线,伺服控制器可以与伺服驱动器、编码器等设备进行数据交换和控制指令传输。
在CANopen控制伺服系统中,伺服控制器作为主节点,负责发送控制指令和接收反馈数据。
伺服驱动器、编码器等设备作为从节点,负责接收控制指令并执行相应的动作,并将执行结果反馈给主节点。
CANopen协议中定义了一系列的对象字典,用于存储和传输数据。
主节点可以通过读取和写入对象字典中的数据来实现对从节点的控制。
例如,主节点可以向伺服驱动器的对象字典中写入目标位置数据,驱动器接收到数据后会根据指令进行相应的运动。
CANopen协议还定义了一套标准的通信对象,包括PDO(Process Data Object)和SDO(Service Data Object)。
PDO用于实时传输数据,例如位置、速度等实时反馈数据;SDO用于配置和管理设备,例如设置驱动器的参数、读取编码器的分辨率等。
在CANopen控制伺服系统中,主节点通过发送PDO来实现实时控制和数据传输。
主节点可以根据需要配置PDO的传输周期和数据内容,从节点接收到PDO后会根据指令进行相应的动作,并将执行结果通过PDO反馈给主节点。
除了PDO和SDO,CANopen协议还定义了一些其他的通信对象,例如NMT(Network Management)对象用于管理网络中的节点状态,EMCY(Emergency)对象用于传输紧急事件信息等。
总之,CANopen是一种高效、可靠的通信协议,适用于控制伺服系统。
通过CAN总线,主节点可以与从节点进行数据交换和控制指令传输,实现对伺服系统的精确控制。
CANopen协议的对象字典和通信对象提供了丰富的功能,可以满足不同应用场景的需求。
施耐德变频器和第三方控制器的CAN通讯- 廖作军
施耐德变频器和第三方控制器的CAN通讯MC SAE廖作军前言:本文简要讲述了施耐德变频器ATV71/ATV32/ATV312的CANOPEN通信模式以及和第三方支持CAN接口通讯的控制器之间建立CANOPEN通信的基本流程。
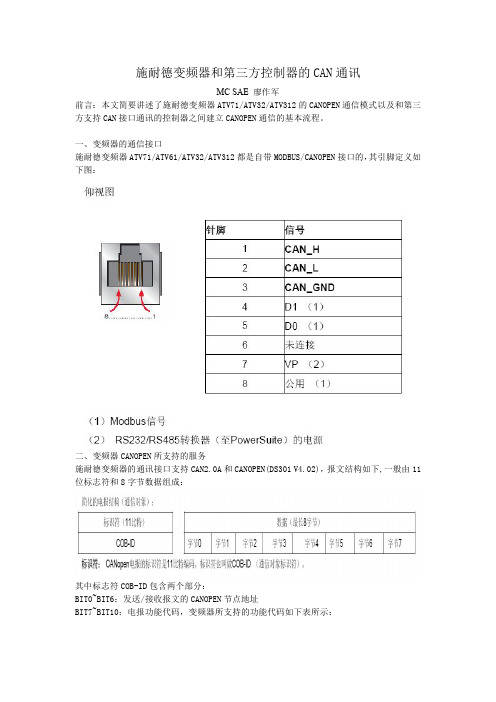
一、变频器的通信接口施耐德变频器ATV71/ATV61/ATV32/ATV312都是自带MODBUS/CANOPEN接口的,其引脚定义如下图:二、变频器CANOPEN所支持的服务施耐德变频器的通讯接口支持CAN2.0A和CANOPEN(DS301V4.02),报文结构如下,一般由11位标志符和8字节数据组成:其中标志符COB-ID包含两个部分:BIT0~BIT6:发送/接收报文的CANOPEN节点地址BIT7~BIT10:电报功能代码,变频器所支持的功能代码如下表所示:由此可以看出,施耐德变频器支持如下服务:1、NMT网络管理服务:提供网络管理(如初始化、启动和停止节点,侦测失效节点)服务。
这种服务是采用主从通讯模式(只有一个NMT主节点)来实现的。
变频器作为从站,可以通过NMT来接收主站的管理信号(如果NMT报文中的Node-ID即从站地址为0,那就是以广播方式发送给网络上的所有变频器)。
NMT报文一般有以下结构:2、BootUp引导消息变频器上电初始化完成后,其CANOPEN会自动进入“预运行”状态。
并向主机发送此引导报文,表明变频器已经上电完成准备好接收主站的NMT指令了。
此报文发送的数据是16#00.3、SYNC同步消息:此报文是由主机发出,用来批准所有的从机进行同步通信模式,但是施耐德变频器PDO数据是不支持同步传输模式的。
4、EMCY紧急对象:当变频器每次出现故障时,会向主机发送此紧急报文,里面包含了由变频器制造商预先定义好的故障代码。
紧急报文的优先权大于其他服务。
5、PDO过程数据对象:PDO包含了预先定义好的需要进行自动循环交换的数据,以异步模式传输,每个PDO最多可传送8个字节的数据。
施耐德LXM 伺服驱动器参数的初步设置
施耐德LXM23伺服驱动器参数的初步设置
1、P2-08特殊参数写入10参数复位(恢复出厂设置、复位
后请重新接通电源)
2、AL013紧急停止(EMGS)异警P2-17数字输入DI8功能
规划(接脚30)021常闭设置为121常开
3、AL015正向极限PL(CCWL)异警P2-16数字输入DI7功
能规划(接脚31)023常闭设置为123常开
4、AL014反向极限NL(CWL)异警P2-15数字输入DI6功
能规划(接脚32)022常闭设置为122常开
5、电子齿轮比分子N1:P1-44电子齿轮比分母M:P1-45
6、P2-10数字输入DI1功能规划(接脚9)101常开SON 接
通时伺服启动(Servo On)
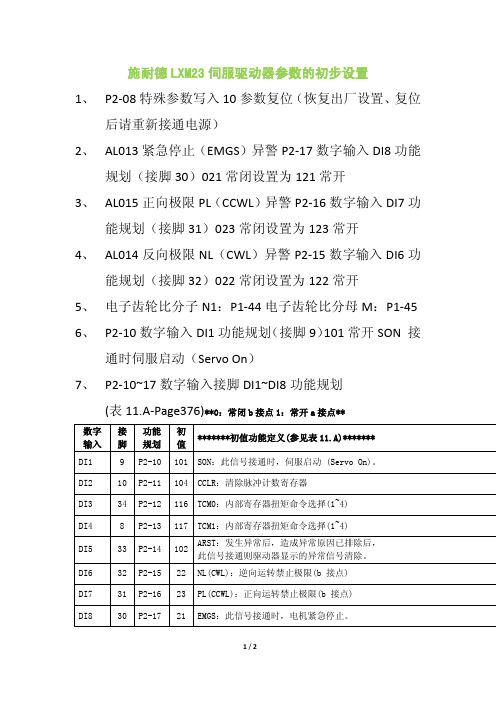
7、P2-10~17数字输入接脚DI1~DI8功能规划
(表11.A-Page376)**0:常闭b接点1:常开a接点**
8、 P 1-00外部脉冲列输入型式设定0002:脉冲模式、
滤波宽度、逻辑型式、脉冲命令来源未使用(默认)
9、 P 1-01控制模式及控制命令输入源设定0100:控
制模式设定/2bit 、扭矩输出方向控制10、 P2-68自动使能和自动限制使能0001
、DIO 设定值控制(默认)。
施耐德及三菱两家品牌的参数比较
施耐德运动控制器与伺服驱动器及伺服电机简述:目前我公司所用施耐德系列的元器件比较广泛,除了低压电器及接近开关、控制部分的有PLC,运动控制器、伺服驱动器、触摸屏系列都有应用。
其中,洗瓶机上所有的为小型PLC,烘箱上所使用的为中型PLC,软袋线上所用的为中大型PLC及运动控制器、灌装机上使用的为运动控制器。
洗瓶机,烘干机程序相对来说较简单,机型较稳定,我司已经形成统一的程序;软袋线程序复杂,但研发周期较长,程序非常稳定并得到国外厂商的一致认可;KGS的机型很多,程序版本从09年开始,处于不断完善的过程,目前已按照系列有标准化的程序版本;拉丝灌封机型也较多,去年又重新研发了带扇形结构的新机型;程序版本在11年上半年之前没统一,11年下半年,由我司牵头,施耐德公司配合,将部分带扇形的机型程序按KGS功能块的模式标准化;灌装机所使用的绝大部分为运动控制器,运动控制器的型号为LMC20,伺服驱动器的型号为LXM32系列和LXM05系列,伺服驱动器与伺服电机的连接是通过动力线及编码器线两根线连接,两端的接头均为快接方式,需要电工连接及稳固;从程序开发来讲,我司大部分设计人员已掌握施耐德系统的程序开发,调试及处理常见问题。
从服务部反馈的问题来看,大部分的不稳定的因素,均在于现场的干扰或是线本身的连接问题(主要体现在编码器线报警),对于施耐德品牌来说,因为是欧系的品牌,相对来说,对现场整体的要求比较高,需要正规化的配线和走线工艺流程来控制,而这点恰恰是我们公司所欠缺的。
目前我们部门在这个方面进行改革,我相信,改良后的接线工艺会带来很大的改善;同时需要督促供应商提高对线的连接检测。
控制器的基本参数:扫描周期为1~20ms可调,我们大部分的程序设置为4ms;(由于施耐德系统提供的是整个程序的扫描参数,需要根据具体程序量来核算扫描周期)通讯方式为Canopen方式,通讯速率为1M;伺服系统分辨率为17位,编码器系统为绝对值编码器,断电记忆位置;编程软件平台为Codesys,为欧系品牌的标准运动控制编程环境,编程环境提供中文与英文及其他语言支持,我司研发部门主要采用英文编程环境;编程语言提供多种的编程语言,本人主要采用功能块与梯形图结合的方式,提高程序的可读性;技术支持方面,施耐德比较到位。
施耐德 CANopen自动化解决方案(中文)

6 Advantys OTB IP20 分布式 I/Os ■ 紧凑:在 55 mm 宽度上提供 20 个 I/O 并包括总线连接, ■ 使用 8 到 32 个通道的 I/O 模块进行扩展 (可达 264 个通道), ■ 各个 Twido 可编程控制器都通用的宽范围开关量和模拟量 I/O, ■ 使用插入式螺钉接线端子连接传感器和执行器。
PC 连接工具
IP20 分布 I/Os 输入数量 输出数量 8 (6 个继电器 / 2 个晶体管) 配置软件
总线连接电缆 (1 个 M12 连接器,飞线)
长度 (m)
24VDC 电源连接电缆 (1 个 7/8 连接器,飞线)
长度 (m)
1P67 整体式 I/O 分路器
输入数量
输出数量
外壳类型
塑料
塑料
■ 安装快速并且简单
在 Twidosoft 中声明之后,Twido 和 OTB 模块之间可实 现透明的通信。
Twido 和 Avantys FTB (结合) 的优点
■ 一致且匹配的解决方案
从 PLC 到传感器提供预接线,保证与 Telemecanique Osiprox、Osiris 和 Osisonic 传感器的完美兼容。
I/O 侧的连接器
圆圈中指示订购的型号
变频器 (单相电源 200...240V)
电机功率 (KW)
变频器 (三相电源 380...500V)
电机功率 (KW)
总线分支电缆 (2RJ45 连接器)
长度 (m)
总线电缆 (飞线,飞线)
长度 (m)
分线盒
总线电缆 (飞线,飞线) 长度 (m)
连接器
配置软件
接近开关 Osiprox XS...
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
施耐德LEXIUM15系列伺服的CANOPEN控制施耐德LEXIUM 15 LP 与MP/HP伺服应用笔记目录接线端子硬件接线图 4 接线 ON2.8工具软件配置CANOPEN设备LXM 15 6. . 标配置: 程软件下导入*.CO配置文件 9参数设置 3. MING: . PP点到点模式19 .速度模式velocity profile21一. 概述3 二.LXM15伺服驱动器的硬件4 1. LXM15伺服驱动器外部 2 外部24V控制电源接线5 3. 驱动器与电机的5 4. 外部I/O端子的接线 5 5. 串行通讯接口5 6. X3接口CANOPEN接线6 三 利用SYC 3.1.1. 节点配置,添加PDO字.7 3.1.2PDO字7 3.1.3Object configuration目8 四 在PLC7编 五 LXM15驱动器10 5.1.1. 基本设置 10 5.1.2. 编码器设置 11 5.1.电机选择11 5.1.4. POSITION位置参数 11 六. LXM15运动功能的实现12 6.1.1. LXM15的JOG实现 12 6.1.2. 回原点功能HOM 13 6.1.3. 运动任务TASK的实现 16 6.1.46.1.5一. 概述Lexium 15应用有多种通讯总线和网络连接可用,包括CANopen , Fipio , Modbus lus 和Profibus DP , 都可以集成到分散自动化架构中。
对于多轴应用,您还可以增加:m 15 伺服驱动器的控制性能,适用于需要几轴复杂同步的应用( 凸轮模式,定长切割等)。
PLC OPEN,可以方便与施耐德PLC 通讯,适合高速定位,同步控制,满足复杂机器工艺.CANOPEN 是性价比很高的一种高速控制总线,一个网段下最大64个设备,最大127个设备Lexi 动模式到点模式,运动任务,电子齿轮 速度控制模式:速度调节 扭矩控制模式运动控制卡,通过它可以扩展Lexiu SERCOS 选件卡,用于连接到Premium PLC 上的TSX CSY 运动控制模块,这就意味者Lexium 15 伺服驱动器可以满足复杂应用的性能需求。
其中LXM15集成CANOPEN 通讯接口,符合,很强抗干扰,完善通讯机制.um 15 伺服驱动器具有多种操作模式:传统调整模式:原点回归,手 位置控制模式:点二.LXM15伺服驱动器的硬件接线1.LXM15伺服驱动器外部端子硬件接线图说明:其中X4为控制电源接口,需要外接24V;X0A为动力电源接口;X9为电机接线;X3为I/O接口,伺服驱动器的ENABLE必须短接24VDC. 详细接线图见下图2外部24V控制电源接线3.驱动器与电机的接线4.外部I/O端子的接线5.串行通讯接口RS232接口和CANOPEN接口,利用此接口可以连接PC和驱动器.6.X3接口CANOPEN接线AM02CAN001V000适配器采用施耐德AM02CAN001V000适配器连接CANOPEN总线,CAN电缆TSX CAN CBDD1(2头DB9母头). 可以按照接线图做线,采用双绞线,注意2个终端连接120欧姆电阻.三利用SYCON2.8工具软件配置CANOPEN设备LXM 15利用SYCON2.8工具软件配置文件。
下图是在CANOPEN通讯卡TSX CPP 110 下面配置了3台LXM15MPHP和1台LXM15LP.站号分别是2,3,4,5. 如果没有LXM15 EDS文件需要先添加*.EDS文件. EDS-Electronic Data Sheet.LXM15LP_CANopen_files_v1.43.exe, (版本V1.43),LXM15MP_HP_CANopen_files_v6.63.exe(版本V6.63).目前还有更新版本.本案例是用TSX CPP110卡配置3台LXM MP及一台LXM LP.PDO:过程处理数据,实时交换,是系统自动处理,操作模式下才能使用.生产/消费模式3.1.2.PDO字具体配置PDO:QB表示输出字(写)或者(上位->驱动器),IB表示输入字(读)或者(驱动器->上位)地址和长度:PDO有字/双字,长度则为2/4; 上面的配置举例说明:第一个QB配置6040: control word (控制字,单字长度2)第二个QB配置60FF: target velocity(目标速度) 和607A:targey_position (目标位置)总长度8(双字)第三个QB配置6081: profile velocity(轮廓速度) 和 modes of operation(模式)总长度5个字节第一个IB配置6041: Statusword (状态字,单字长度2)第二个IB配置6044: position actual (实际位置)Velocity actual value (速度值),总字长度8)第二个IB配置6061: modes of operation display (模式显示,总字长度2)3.1.3.Object configuration目标配置:注意:1800/2 Transmission type 值设定:16#FF (表示PDO类型非同步),不能设置16#1F,否则位置模式(PP)不能正常使用.目标配置:注意:需要添加2600/2601/2602;2A00/2A01/2A02.添加6083(ACC加速度)6084(DEC减速度),添加6094/01,6094/02速度因子.分别设置为3C和1,这样电机实际速度单位就为RPM.配置完成后保存为*.CO配置文件.四在PLC7编程软件下导入*.CO配置文件打开PL7软件,在硬件配置里面点击select database 选择刚才保存的*.CO文件; 在INPUTS栏目里面输入PDO映射到PLC的%MW字开始地址,字数; 在OUTPUTS栏目里面输入PDO映射到PLC 的%MW字开始地址。
本例表示输入字从%MW0开始24个字,输出字从%MW100开始32个字;根据在SYCON中的配置PDO,QB对应输出字,IB对应输入字:第一个QB配置6040: control word (控制字,单字长度2),对应PLC地址%MW100(单字);第二个QB配置60FF: target velocity(目标速度) 和607A:targey_position (目标位置)总长度8(双字),则分别对应PLC地址%MD101,%MD103;第三个QB配置6081: profile velocity(轮廓速度)(双字)和modes of operation(模式)总长度5个字节 分别对应PLC地址%MD105,%MW107.COM黄色灯长亮表示CANOPEN通讯正常.五LXM15驱动器参数设置利用UNILINK 软件设置驱动器参数.电缆可以自做,见串行通讯接口:接线图.连接成功后就可以设置参数,利用ASCII命令就可以控制驱动器了.5.1.1.基本设置设定LXM15驱动器CANOPEN的地址:2,BUS速度:500K, UNITS(单位):ACC加速度的单位为:MS->VLIM/VCMD 达到目标速度的加速时间VELOCITY速度的单位为:RPM 转/分POSITION位置的单位为:DEG 度 ,也可以选择用户单位COUNTS.5.1.2.编码器设置对于施耐德BSH电机,编码器选择2HIPERFACE,20位绝对值编码器1048576.5.1.3.电机选择如带刹车选WITH,其他不变.5.1.4.POSITION位置参数V_MAX表示速度最大值 resolution=3600/256表示BSH伺服电机转256圈,实际机械转3600度(10圈).此机器装置减速比为1:256.六.LXM15运动功能的实现6.1.1.LXM15的JOG实现JOG功能常常用在需要手动点动设备低速移动到机台需要的位置.有3种方式可以点动.方式1 :ASCII命令在UNILINK 软件连接到驱动器,在线时候在终端窗口下:输入命令:EN(使能) 再输入VJOG XX(XX是JOG的速度) 输入命令MJOG(开始JOG)或者PC按键F4.方式2 外部端子+SDO方式. SDO服务数据对象,它采用客户端/服务器机制,1个SDO最大4个字节,需要通过编程去读写数据.本例采用LXM15伺服驱动器的外部端子LI1功能设置为20:START_JOG V=X , (开始JOG功能) 硬件上将LI1接到PLC的输出点=1的时候开始JOG.JOG的速度(CANOPEN地址3563/1)用SDO写入驱动器. 操作模式设置为16#F8.方式3 采用SDO方式用SDO写3621/1(VJOG的速度),用SDO写3591/1(MJOG开始=1)点动开始. 操作模式设置为16#F8.LI1输入点INITRIG地址3563/1,IN1TRIG(读写,双字)方式2 JOG,PLC程序的实现: 驱动器先使能和设置模式,再给定JOG速度(采用SDO方式写入驱动器).然后利用IN1输入点做JOG.程序说明:%M34=1使能驱动器(发送0F),操作模式=F8(点动模式);%MD700:JOG 的速度,如果是负数表示反向点动,负数在PLC软件平台下需要用2的补码;M20=1点动,M20=0停止点动.6.1.2.回原点功能HOMMING:机器经常需要有原始位置,LXM15回零的方式有很多种; 本例是设定驱动器LXM15把当前点直接为原点, 强制当前位置直接为原点. 操作模式OPMODE=06回原点模式. 控制字=16#001F.状态字的说明:LXM 15MP/HP 状态字(STA) LXM 15LP 状态字(STA) 命令字(使能) 16#0F 16#0427/16#0527 16#0637命令字(复位) 16#80 16#0440 16#0640命令字(停止) 16#06 16#0421 16#0631命令字 16#07 16#0423 16#0633上电后 16#0421 16#0631位置到达后 16#1427/16#1527 16#1637注意:LP驱动器使能必须走流程控制,即先06再/16#0F.LXM15 MP/HP驱动器的使能和模式给定:直接发命令字16#0F.MODE=06.对于LXM15 LP驱动器的使能:命令字先发06再0F,必须按照流程走.MODE=06.判断原点到达标志:状态字的第12位=1或者电机实际位置=06.1.3.运动任务TASK的实现LXM15驱动器里面可以存储运动参数序列,驱动器可以按照该序列进行运动,成为运动任务.LXM15 LP EEPROM存储180个任务,RAM存储75个;LXM15 MP/HP EEPROM存储200个任务,RAM存储100个;TASK参数设置:进入MOTION TASK TABLE:表中一行为一个任务.该任务组有8个任务.举例说明第一个任务:X_CMD:-450 目标位置为-450度,V_CMD:200 速度200 RPMNEXT MOTION TASK :NEXT NUMBER为2表示 下一任务为2,2#任务是回到0位置.PLC程序的实现:采用CANOPEN总线方式,先使能驱动器和设置操作模式,再启动任务(写入任务号)就能启动TASK任务.首先驱动器使能.命令字=16#0F;设置驱动器操作模式=FF,TASK模式任务号的写入:CANOPEN地址(3642/1)管理字%MW678:X0=1是SDO写入成功标志. 相关参数地址表:任务位置到达标志:LXM MP/HP状态字=16#0427再16#0527表示位置到达。