第六章FX系列PLC程序设计方法
第六章FX系列PLC程序设计方法
第六章FX系列可编程控制器的程序设计方法内容提要:本章主要阐述梯形图的经验设计法、时序控制系统梯形图设计方法、用PLC 改造继电-接触器控制电路、顺序控制设计法,使用起保停电路的编程方法及以转换为中心的编程方法。
课程重点:梯形图的经验设计法、时序控制系统梯形图设计方法、顺序控制设计法。
课程难点:时序控制系统梯形图设计方法、用PLC改造继电-接触器控制电路。
教学目标:重点掌握梯形图的经验设计法、时序控制系统梯形图设计方法、顺序控制设计法,并能熟练地用上述方法编写一些简单程序,初步掌握使用起保停电路的编程方法及以转换为中心的编程方法。
第一节梯形图的经验设计法经验设计法是采用设计继电器电路图的方法来设计比较简单的开关量控制系统的梯形图,即在一些典型电路的基础上,根据被控对象对控制系统的具体要求,不断地修改和完善梯形图。
有时需要多次反复地调试和修改梯形图,增加一些触点或中间编程元件,最后才能得到一个较为满意的结果。
这种方法没有普遍的规律可以遵循,具有很大的试探性和随意性,最后的结果不是唯一的,设计所用的时间、质量与设计者的经验有很大的关系,一般用于较简单的梯形图的设计。
一些电工手册中给出了大量常用的继电器控制电路,在用经验法设计梯形图时可以参考这些电路。
下面先介绍经验设计法中一些常用的基本电路。
一、起、保、停电路图6-1 起保停电路起、保、停电路是起动、保持和停止电路的简称,如图6-1示。
图中的起动信号X1和停止信号X2(例如起动按钮和停止按钮提供的信号)持续为ON 的时间一般都很短,这种信号称为短信号。
起、保、停电路最主要的特点是具有“记忆”功能,当起动信号X1变为ON 时(波形图中用高电平表示),X1的常开触点接通,如果这时X2为OFF ,X2的常闭触点接通,Y1的线圈“通电”,它的常开触点同时接通。
放开起动按钮,X1变为OFF(用低电平表示),其常开触点断开,“能流”经Y1的常开触点和X2的常闭触点流过Y1的线圈,Y1仍为ON ,这就是所谓的“自锁”或“自保持”功能。
电气控制与PLC控制基础理论-第六章

输入
输出
SB1 X1 SB2 X2
红灯L1
Y0
绿灯L2,L3,L4,L5 Y1
黄灯L6,L7,L8,L9 Y2
表6-2 天塔之光控制系统输入/输出端口分配表
天塔之光控制系统设计
2、基于三菱FX2N系列PLC天塔之光控制系统设计 (2)PLC外部接线图设计 PLC外部接线图设计如图6-10所示。
➢ 要考虑电源的输出功率和极性问题。
编制PLC程序并进行模拟调试
编制PLC程序时要注意以下问题: (1)以输出线圈为核心设计梯形图,并画出该线圈的得电条件、失电条件和自锁条件。 (2)如果不能直接使用输入条件逻辑组合成输出线圈的得电和失电条件,则需要使用辅助继电器 建立输出线圈的得电和失电条件。 (3)如果输出线圈的得电和失电条件中需要定时或计数条件时,要注意定时器或计数器得电和失 电条件。 (4)如果输出线圈的得电和失电条件中需要功能指令的执行结果作为条件时,使用功能指令梯级 建立输出线圈的得电和失电条件。 (5)画出各个输出线圈之间的互锁条件。 (6)画保护条件。 根据以上要求绘制好梯形图后,将程序下载到PLC中,通过观察其输出端发光二极管的变化进行模 拟调试,并根据要求进行修改,直到满足系统要求。
图6-16 PLC外部接线图 图6-17 DC24V直流电源接线图
十字交通灯控制系统设计
2、基于三菱FX2N系列PLC十字交通灯控制系统设计 (4)PLC强电电路图 PLC强电电路图如图6-18所示。
图6-18 PLC强电电路图
十字交通灯控制系统设计
2、基于三菱FX2N系列PLC十字交通灯控制系统设计 (5)PLC梯形图设计 PLC梯形图设计如图6-19所示。 (6)指令程序的传输 使用GX Developer(或FXGP/WIN-C)编程软件绘 制图6-19所示的PLC梯形图,并进行转换和PLC程序传 输。也可使用FX-20P型手持式编程器进行程序传输, 方法不再赘述。
第六章FX2N系列可编程控制器

1.10
FX2N系列可编程控制器 第6章 FX2N系列可编程控制器 6.1 FX2系列可编程序控制器及其性能 系列可编程序控制器及其性能
PLC内的特殊辅助继电器各自具有特定的功能 PLC内的特殊辅助继电器各自具有特定的功能 : 1)只能利用其触点的特殊辅助继电器,线圈由PLC自 只能利用其触点的特殊辅助继电器,线圈由PLC自 动驱动,用户只利用其触点 动驱动, M8000:运行监控用,PLC运行时 M8000:运行监控用,PLC运行时M8000接通 运行时M8000接通 M8002: M8002:仅在运行开始瞬间接通的初始脉冲特殊辅助继 电器 M8012 :产生100ms时钟脉冲的特殊辅助继电器 产生100ms时钟脉冲的特殊辅助继电器
1.7
FX2N系列可编程控制器 第6章 FX2N系列可编程控制器 6.1 FX2系列可编程序控制器及其性能 系列可编程序控制器及其性能
1.8
FX2N系列可编程控制器 第6章 FX2N系列可编程控制器 6.1 FX2系列可编程序控制器及其性能 ห้องสมุดไป่ตู้列可编程序控制器及其性能
2. 输出继电器 (Y0—Y177):用于将 输出继电器Y( ):用于将 ):用于将PLC的输 的输 出信号传给外部设备,它只能由程序指令驱动, 出信号传给外部设备,它只能由程序指令驱动, 不能由外部信号驱动,见图 不能由外部信号驱动,见图6-1
系列PLC 一、FX2系列 系列 1. 型号命名方式: 型号命名方式:
1.5
FX2N系列可编程控制器 第6章 FX2N系列可编程控制器 6.1 FX2系列可编程序控制器及其性能 系列可编程序控制器及其性能
2. FX2系列 系列PLC及其性能 系列 及其性能 1)结构:基本单元、扩展单元、扩展模块、特殊功能 )结构:基本单元、扩展单元、扩展模块、 单元 2)FX2系列 ) 系列PLC的基本单元与扩展单元或扩展模块可 系列 的基本单元与扩展单元或扩展模块可 构成I/O点数为 构成 点数为16-256点的系统 点数为 点的系统 3)编程设备:手持式编程器FX-20P-E、图形编辑器 )编程设备:手持式编程器 、 GP-80FX-E、编程软件MELSFC-MEDOC 、编程软件
第六章 PL的基本原理及组成
X0
输出负载 输出端子
Date: 2013-8-10
Time:
Page: 11
三、FX2N系列PLC的内部资源
2、输出继电器(Y)
输出继电器采用八进制编号,有内部触点和外部输出触 点(继电器触点、双向可控硅、晶体管等输出元件)之 分,由程序驱动。
在PLC内部,外部输出触点与输出端子相连,向外部负 载输出信号,且一个输出继电器只有一个常开型外部输 出触点。 输出继电器有无数个内部常开和常闭触点,编程时可随 意使用。
Date: 2013-8-10 Time: Page: 18
32位双向计数器
有两种32位加/减计数器,设定值:-2147483648~ +2147483647。 通用计数器:C200~C219共20点 保持计数器:C220~C234共15点 计数方向由特殊辅助继电器M8200~M8234设定。 加减计数方式设定:对于C△△△,当M8△△△△ 接通(置1)时,为减计数器,断开(置0)时,为 加计数器。
Date: 2013-8-10
Time:
Page: 12
三、FX2N系列PLC的内部资源
3、辅助继电器(M)
由内部软元件的触点驱动,常开和常闭触点使用次数不 限,但不能直接驱动外部负载,采用十进制编号。
通用辅助继电器M0~M499(500点)
掉电保持辅助继电器M500~M1023(524点)(可更改) 掉电保持辅助继电器M1024~M3071(2048点)
断电保持数据寄存器D200~D511共312点,只要不改 写,原有数据不会丢失。(可通过参数改为一般用) 断电保持数据寄存器D512~D7999共7488点,只要不 改写,原有数据不会丢失。D1000以后可以500点为 单位设置文件寄存器。 特殊数据寄存器D8000~D8195共106点 这些数据寄 存器供监视PLC中各种元件的运行方式用。
第6章 顺序控制梯形图的编程方式
1-6
PLC原理及应用 原理及应用
3、转换条件: 进入初始步的条件:M8002=1;T2=1。 进入初始步的条件:M8002=1;T2=1。 进入4秒步的条件:X0=1。 进入4秒步的条件:X0=1。 进入6秒步的条件:T0=1。 进入6秒步的条件:T0=1。 进入5秒步的条件:T1=1。 进入5秒步的条件:T1=1。 特别注意初始步的激活问题:用M8002的常开触点 特别注意初始步的激活问题:用M8002的常开触点 将初始步的编程元件置位。 4、各步的动作: 初始步的动作:Y0。 初始步的动作:Y0。 4秒步的动作:Y0、T0。 秒步的动作:Y0、T0。 6秒步的动作:Y1、T1。 秒步的动作:Y1、T1。 5秒步的动作:Y1、Y2、T2。 秒步的动作:Y1、Y2、T2。 二、根据分析画出时序图(见图6 所示) 二、根据分析画出时序图(见图6-2所示) 根据分析画出时序图
■
1-17
PLC原理及应用 原理及应用
三、跳步与循环次数的控制
S0
X04
相当 选择 分支
1、跳步(如图6-7所示) 、跳步(如图6 所示) 1)当S0处于活动状态,且X04=1时,将跳 处于活动状态, 04= 过S1步,由步S0进展到S2。称为正向跳步。 由步S 进展到S 称为正向跳步 正向跳步。 2)当S4处于活动状态,且X05=1时,将从 S4处于活动状态 处于活动状态, X05=1时 步S4返回到步S3。称为逆向跳步。 S4返回到步 。称为逆向跳步 返回到步S3 逆向跳步。 显然,跳步属于选择序列的一种特殊情况。 显然,跳步属于选择序列的一种特殊情况。 2、循环次数的控制 在设计梯形图时,经常遇到一些需要多次 重复的操作,此时可借助高级语言循环语句的 思想来设计顺序功能图和梯形图。逆向跳步
第六章3-1传送比较指令及应用资料

一、比较指令 CMP (Compare)
❖ 操作数
[S1]、[S1] : K,H、KnX、KnY、KnM、KnS、T、C、 D、
V,Z
[D]:Y、M、S X0 ❖ 梯形图
[S1] [S2] [D]
CMP K100 C10 M0
M0 K100<C10的当前值时,M0 = ON
M1 K100=C10的当前值时,M1 = ON
T2
X2
十六进制 Y3 Y2 Y1 Y0
0
0000
1
0001
2
0010
3
0011
4
0100
5
0101
6
0110
7
0111
8
1000
9
1001
MOV H03
T1 K50
K1Y0
MOV H01
T2 K60
K1Y0
MOV H05 K1Y0
MOV H00 K1Y0 END
实习操作:电动机Y-△降压启动控制线路与程序
图5.6 Y-△降压启动控制线路
表5.7 Y-△降压启动过程和传送控制数据表
操作元 件 SB2
SB1 KH
状态
形启动 T0延时10s T0延时到 T1延时1s T1延时到 △形运转
停止 过载保护
输入端
口
Y3/KM3
X2
0
输出端口/负载 Y2/KM2 Y1/KM1
1
1
Y0/HL 1
传送数据 K7
0
0
2.区间比较指令ZCP举例
【例题】 用如图所示的传送带输送工件,数量为20个。连接X0端子的光电传感器对 工件进行计数。当计件数量小于15时,指示灯常亮;当计件数量等于或大于15以上 时,指示灯闪烁;当计件数量为20时,10s后传送带停机,同时指示灯熄灭。设计 PLC控制线路并用区间比较指令ZCP编写程序。
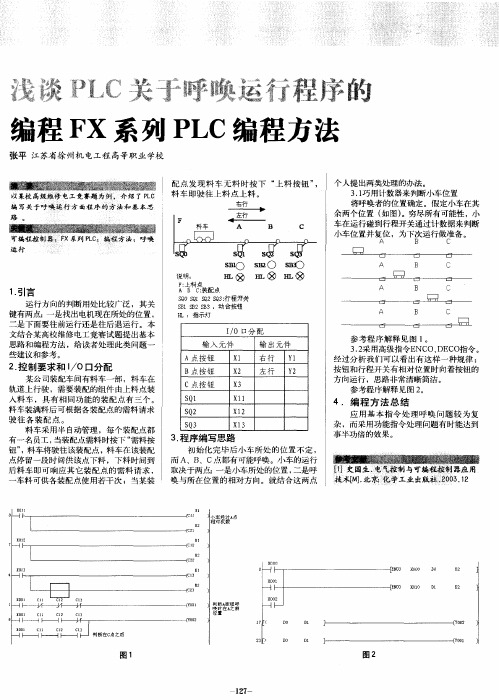
浅谈PLC关于呼唤运行程序的编程FX系列PLC编程方法
输 出元件 右 行 左行 Y 1 Y 2
2控 制 要求 和 io口分 配 . /
某公 司装配车 间有料车一部 ,料车在 轨 道 上 行 驶 ,需 要 装 配 的 组 件 由上 料 点 装 入 料 车 ,具 有 相 同 功 能 的 装 配 点有 三 个 。 料车装满料后 可根据 各装配点的需料 请求 驶往 各 装配 点 。 料车采用半 自动管理 ,每个装配点都 有 一名 员工 , 当装 配点 需 料 时 按 下 “ 料 按 需 钮 ” 料 车 将 驶 往 该 装 配 点 , 车 在 该 装 配 , 料 点停留一 段时 间供 该点下料 ,下料时 间到 后料 车即可 响应其 它装配点 的需料请 求 , 车 料 可 供 各 装 配 点使 用若 干 次 ;当 某 装
浅 谈 P C关 于 呼 唤 运 行程 序 L
编程 F X系列 P C编程方法 L
张平 江苏省徐 州机 电工程 高等职业学校
配 点 发 现 料 车 无 料 时 按 下 “ 料 按 钮 ” 上 , 料车 即驶 往上料 点上料 。 个 人 提 出 两 类 处理 的办 法 。 3 1 用计 数 器 来 判 断小 车 位 置 .巧
一
C点 按 钮
S1 Q S2 Q
S3 Q
X 3
X U Xl 2
Xl 3
参考程序 解释见 图 1 。 32 .采用高级指令E O、 E O指令 。 NC D C 经过分析我们 可以看出有这样一 种规 律 : 按钮 和行 程开 关有相对 位置时向着按钮的 方向运行 ,思路非常清晰简洁 。 参考程序解释见图 2 。
4.编 程方 法 总 结
应 用基 本指 令 处理 呼唤 问题 较 为复 杂 ,而采 用功能指令处理 问题有时能达到 事半功倍的效果。
FX系列PLC基础编程
中级挑战(一)E-2.1 (不同尺寸的 部件分拣)
1. 按下开关(X24), 传送带运行,关 闭开关(X24),传送带停止。 2.按下按钮PB1(X20), 供给指令 (Y0)开始运行,当机器人从出发 点移动的时候,(Y0)停止运行。 3.机器人补给大,中,小部件,大 中部件被放到后面的传送带上而小 部件被放到前面的传送带上。 4.传送带上的部件大小被传感器上 (X1)中(X2)下(X3)检测出 来。
下复位计数器(X1),(C0)被清零。
初级挑战(一)D-1 (餐厅传呼单元)
• 1.按下按钮1(X0),指示灯(Y0)点亮,松开(X0),(Y0)仍然亮; • 2.按下按钮2(X1),指示灯(Y1)点亮,松开(X1),(Y1)仍然亮; • 3.当(Y1)(Y2)都亮的时候,指示灯(Y23)点亮。按下按钮PB1(X20), (Y1)(Y2)(Y23)都熄灭。
初级挑战(一)D-6 (输送带驱动)
1. 按下按钮PB1(X20),若机器人在原 点位置(X5),供给指令(Y7)开始执 行。松开(X20)直到机器人回到原点 位置(X5),供给指令(Y7)被锁存。 2.当传感器(X0)检测到一个部件,上 段输送带正转(Y0)运行;当传感器 (X1)检测到一个部件,中端输送带正 转(Y2)运行而(Y0)停止;当传感器 (X2)检测到一个部件,下端输送带正 转(Y4)运行而(Y2)停止。 3.当传感器(X3)检测到一个部件且机 器人回到原点位置(X5),一个新的部 件被供给。
• 1.按下按钮PB1(X20), 指示灯(Y0)亮灯, 松开按钮PB1(X20),指示灯(Y0)仍亮。 • 2. 按下按钮PB2(X21),指示灯(Y0)熄灭。
初级挑战(一)B-3.1(控制优 先程序)
• 1.打开开关SW1(X24) ,红灯(Y0)亮。 • 2.打开开关SW2(X25) ,红灯(Y0)亮,绿灯(Y1)不亮,当红灯(Y0)熄灭时,绿灯(Y1)才
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 LD X1 1 AND X2 2 OR X2 3 OUT Y0
第六章FX系列PLC程序设计方法
3
作者 贺 娟
❖ 有几个并联电路串联时,应该将并联触点多的电路放 在左方。
X1 X2 ANB X4
Y0
不好!
X2
X1
Y0
X4
好!
0 LD X1 1 LD X2 2 OR X4 3 ANB 4 OUT Y0
第六章 FX系列PLC的 程序设计方法
——第一部分 梯形图的分析设计法
6.1 梯形图的设计规则与技巧 6.2 梯形图的典型环节 6.3 梯形图的经验设计例 6.4 梯形图程序的设计步骤和设计举例
第六章FX系列PLC程序设计方法
作者 贺 娟
6.1 梯形图的设计规则与技巧
一、梯形图的设计规则
❖ 触点只能与左母线相连,不能与右母线相连; ❖ 线圈只能与右母线相连,不能直接与左母线相连,右
0 LD X2 1 OR X4 2 AND X1 3 OUT Y0
第六章FX系列PLC程序设计方法
4
作者 贺 娟
❖ 一个触点不能有两个方向的能流流过。 触点应画在水平线上,不能画在垂直分支线上 桥形电路的化简方法:找出每条输出路径进行并联
X1 X2 Y0
X5 X3 X4
错误!
X3 X5 X1 X1 X5 X3
第六章FX系列PLC程序设计方法
11
作者 贺 娟
2、定时器与计数器配合使用
X2
T0
T0 K600
X2 RST C0
X2
60s T0常开触点
1 Hour
T0
Y0
C0 K60
C0 Y0
此电路有无问题? 怎么改?
C0对T0的60s脉冲计数
延时时间=60s60=3600s
第六章FX系列PLC程序设计方法
12
第六章FX系列PLC程序设计方法
13
作者 贺 娟
四、分频电路
2、用置位复位指令 构成二分频电路:
3、用多个辅助继电 器构成二分频电路:
1、用边沿检测触点 构成二分频电路:
X0
Y0
M0
X0
M0
Y0
Y0
第六章FX系列PLC程序设计方法
14
作者 贺 娟
五、单按钮启动、停止电路
用一个按钮来实现启动和停止两种控制。
PLC的Y0输出端口控制电 动机的转动和停止,Y1输 出端口控制电动机的正转 和反转。
X0 X1
M0
停 转 停 转 停 转停 转
Y0
电路中X0为ON后T0开始计时。6s后T0常开触点接通, Y0为ON。X0为OFF后T6开始计时,9S后T6常闭触点断 开,使Y0为OFF,T6亦被复位。
第六章FX系列PLC程序设计方法
9Байду номын сангаас
作者 贺 娟
二、振荡电路
K90
X0 Y0
8s 9s 8s
第六章FX系列PLC程序设计方法
10
作者 贺 娟
三、长延时电路
第六章双FX线系列圈P输LC出程序设计方法
7
作者 贺 娟
❖ 绘图时应注意PLC外部所接“输入信号”的触点状态与
梯形图中所采用内部输入触点(X编号的触点)的关系!
SB1
SB2
SB1 SB2
SB1 SB2
第六章FX系列PLC程序设计方法
8
作者 贺 娟
6.2 梯形图的典型环节
一、延时接通、延时断开电路
FX系列可编程控制器的定时器最长定时时间为3276.7s,要 设定更长的时间,需要用户自己设计长延时电路。
1、定时器“接力”电路
用N个定时器串级“接力”延时,达到长延时的目的,电路总 的延时时间为各个定时器设定值之和,所能达到的最大延时时 间为3276.7×N秒。
X0用于启动延时电 路,M0自保持,经 过 2000s+1600s=36 00s=1h后Y0为ON。
第六章FX系列PLC程序设计方法
6
作者 贺 娟
❖ 双线圈输出的处理
如果在同一个程序中,同一元件的线圈使用了两次或多 次,称为“双线圈输出”。
这时前面的输出无效,最后一次输出才是有效的。
X0
X1
X2
Y0 无效 Y0 有效
输入处理 X1=ON,X2=OFF X1
Y3
Y3 Y4
X2 Y3
输出处理 Y3= OFF,Y4=ON
KM2
T0的作用是设定星形启动延时的时间。T1的作用是设定KM2 Y─△切换的延时,以从软件上确保KM2和KM3不会同时 得电。
KM3
第六章FX系列PLC程序设计方法
19
作者 贺 娟
十、三速异步电动机控制电路
低速6s 中速9s
高速
第六章FX系列PLC程序设计方法
20
作者 贺 娟
十一、洗衣机控制电路
作者 贺 娟
3、计数器串级电路
M8012和C0组成一个 0.1s×4000=400s的定时器。 C1对C0常开触点闭合的次数计 数,累计够81个后C1常开触点 接通,使Y0为ON。 X0为ON后400s×81=32400s =9h输出继电器Y0为ON。
这个电路最长的延时时间为0.1s×32767×32767= 107367628.9s≈1242.68天≈3.4年。
➢ 图(a)为利用计数器实现单按钮控制的电路
➢ 图(b)为利用辅助继电器实现单按钮控制的电路
➢ 图(c)中为利用功能指令中的交替输出指令ALT来实现单按
钮控制启停控制的电路第六。章FX系列PLC程序设计方法
15
作者 贺 娟
六、三相异步电动机启-保-停电路
第六章FX系列PLC程序设计方法
16
作者 贺 娟
X2 Y0
X4
正确!
第六章FX系列PLC程序设计方法
5
作者 贺 娟
❖ 线圈并联电路中,应将单个线圈放在上边。
X1 X2
MPS MPP
Y0
Y1
不好!
X1 Y1
X2 Y0
好!
0 LD X1 1 MPS 2 AND X2 3 OUT Y0 4 MPP 5 OUT Y1
0 LD X1 1 OUT Y1 2 AND X2 3 OUT Y0
七、三相异步电动机正反转控制电路
接触器辅助常 闭触点的互锁
电气互锁
机械互锁
第六章FX系列PLC程序设计方法
17
作者 贺 娟
八、三相异步电动机启动、点动和停止控制电路
SB3 SB1
SB2
(d) 用复合按钮SB2实现启停点控制
第六章FX系列PLC程序设计方法
18
作者 贺 娟
九、三相异步电动机星形—三角形启动控制电路
母线可以省略; ❖ 线圈可以并联,不能串联连接; ❖ 应尽量避免双线圈输出。
第六章FX系列PLC程序设计方法
2
作者 贺 娟
二、梯形图的设计技巧
❖ 有几个串联电路并联时,应该将串联触点多的电路放在 上方。
X4 X1 X2
Y0
ORB
不好!
X1 X2 Y0
X4
好!
0 LD X4 1 LD X1 2 AND X2 3 ORB 4 OUT Y0