基于WinCC和STEP7的PID控制
基于WinCC和STEP7的PID控制

工业控制
基于 WinCC 和 STEP7 的 PID 控制
罗庚兴, 宁玉珊
(广东松山职业技术学院电气系, 广东韶关 512126)
摘要: 介绍了一种基于 WinCC 和 S7-300 PLC 实现 PID 控制的方法, 利用 FB41 功能模块实现 PID 控制, 通过 WinCC 进行 实 时 监
表 示 单 极 性 转 换 。 PQW320
是电流 I/O 格式整型值的输
出通道。
规范化程序如图 5 所示。
3.4 温度的 PID 控制程序
(a) 输入参数的设置
(b) 输出参数的设置
FB41 是 连 续 PID 控 制
图 3 模拟量输入、 输出模块参数的设置
器, 调用时应指定背景数据 块 [2], 这 里 指 定 为 DB2。
外部变量名称 CRT / 本地方式
MAN / QUTO 确定按钮 给定温度 实际温度 手动开度 执行器开度 增益
积分时间常数
数据类型 二进制变量 二进制变量 二进制变量 32 位浮点数 32 位浮点数 32 位浮点数 32 位浮点数 32 位浮点数 有符号 32 位数
通讯参数 DB1.DBX0.0 DB1.DBX0.1 DB1.DBX0.2 DB1.DBD2 DB1.DBD10 DB1.DBD14 DB1.DBD18 DB1.DBD26 DB1.DBD30
实 际 温 度 值 (℃ ) , DBD.DBD14 存
图 2 控制系统组成
放 执 行 器 手 动 开 度 给 定 值 (% ) , DBD.DBD18 存 放 执 行 器 实 际 开 度
2.2 控制系统组成
值 (%), DBD.DBD26 存 放 增 益 给 定 值 。 此 外 , 还 分 配 了
STEP7中PID控制的实现方法

STEP7中PID控制的实现方法作为一家专业的环保公司,依斯倍致力于工业废水处理一站式解决方案,拥有众多污水处理的项目案例。
依斯倍工程师也有多年相关的PID工作经验,遇到过也解决过各式各样的问题。
那么今天依斯倍电气工程师就教大家用STEP 7中的模块实现PID的控制方法。
本文讨论的功能模块(SFB41/FB41,SFB42/FB42,SFB43/FB43)仅仅是使用于S7和C7的CPU中的循环中断程序中。
该功能块,定期计算所需要的数据,保存在指定的DB中。
CONT_C块与PULSEGEN块组合使用,可以获得一个带有比例执行机构脉冲输出的控制器。
控制系统的属性由技术过程和机器条件决定,因此,必须选择最适用的系统控制器。
借助于“PID参数设置”工具,可以很方便的调试功能块SFB41/FB41,SFB42/FB42的参数。
在Windows操作系统中,选择start>SIMATIC>STEP 7>PID Control Parameter Assignment,调用“调试PID参数用户界面”。
在最开始的对话框中,你既可以打开一个已经存在的SFB41/FB41“CONT_C”或者SFB42/FB42“CONT_S”的背景数据块,也可以生成一个新的数据块。
由于SFB43/FB43,“PULSEGEN”没有参数设置的用户界面,必须在STEP 7中设置它的参数。
可以使用控制器作为单独的PID定点控制器或在多循环控制中作为级联控制器、混合控制器和比例控制器使用。
控制器的功能基于带有一个模拟信号的采样控制器的PID控算法,如果必要的话,可以通过脉冲发送器(PULSEGEN)进行扩展,以产生脉冲宽度调制的输出信号,来控制比例执行机构的两个或三个步进控制器。
SFB1/FB1“CONT_C”(连续控制器)用于使用连续的I/O变量在SIMATIC S7控制系统中控制技术过程。
可以通过参数打开或关闭PID控制器,以此来控制系统。
实验五 STEP7和WINCC的联调
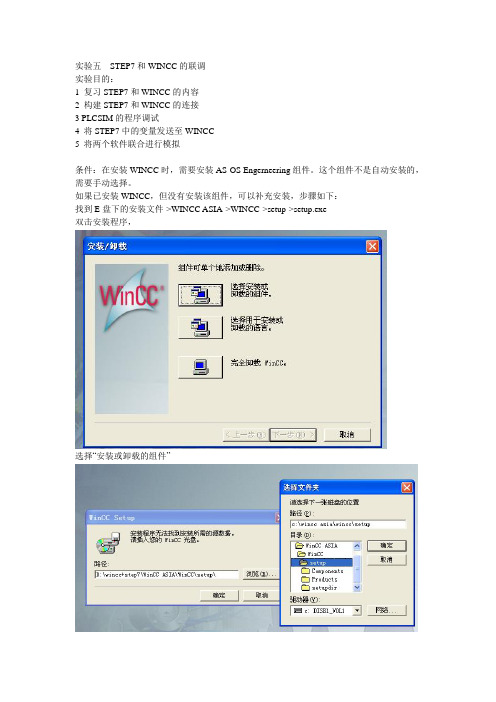
实验五STEP7和WINCC的联调实验目的:1 复习STEP7和WINCC的内容2 构建STEP7和WINCC的连接3 PLCSIM的程序调试4 将STEP7中的变量发送至WINCC5 将两个软件联合进行模拟条件:在安装WINCC时,需要安装AS-OS Engerneering组件。
这个组件不是自动安装的,需要手动选择。
如果已安装WINCC,但没有安装该组件,可以补充安装,步骤如下:找到E盘下的安装文件->WINCC ASIA->WINCC->setup->setup.exe双击安装程序,选择“安装或卸载的组件”选择路径,在出现的“选择组件”对话框中,选择左边的“通讯”,在右边相应组件上打钩。
点击“下一步”即可安装。
安装完毕后,即可实现WINCC和STEP7的联调。
基本原理:通过在STEP7中建立一个OS站,仿真软件PLCSIM能够把WINCC的监控功能连接起来,在PLCSIM中变量的变化,可以再WINCC中显示,这样验证了程序的准确性和增强了可视性。
步骤:1 打开STEP7,建议一个简单程序,名字为qq图1 OB1中程序图程序中包含两个布尔输入k1和k2,一个输出q。
地址如图1所示。
图2 变量表2 PLCSIM仿真先打开仿真再下载程序在PLCSIM中观察程序运行情况。
图3 PLCSIM仿真图3 建立与WINCC的连接①插入一个OS站在STEP7中建立OS站的优点在于STEP7中建立的变量能直接传给WINCC,节省了在WINCC中建立变量的时间,避免了变量的错误。
建立后的图图5 建立好的OS站右击OS(1),对其进行rename,改名为qq。
②修改变量控制属性打开STEP7中已定义的变量符号表,选择要传送给WINCC的变量,右击变量,在快捷菜单上选择Special Object Properties->Operator Control and Monitoring命令。
STEP7中PID仿真实验的实现方法
STEP7中PID仿真实验的实现方法【摘要】PID控制在化工等连续生产行业的控制策略中起着重要的作用,虽然PID控制器参数较少,控制方式较为简单,但是不熟悉P、I、D三个参数所起作用和各参数之间相互联系,相互影响,想要找到一组合适的调节参数也是非常困难的。
使用西门子公司STEP7的程序仿真环境对生产环节的仿真控制来学习PID调节器的使用,对仪控和工艺操作人员,都有着重要的意义。
本文主要介绍了如何通过STEP7和Wincc搭建PID仿真平台来学习PID调节。
【关键词】PID控制;STEP7;Wincc;被控对象仿真一、PID仿真实验在化工行业培训教中的实用性PID控制是在化工生产过程中实用性最强、使用范围最广泛的一种自动控制系统。
在实际生产过程中,DCS或者PLC系统中的PID模块组态简单,使用方便,所需硬件少,所需调节参数少,调节器设定值、输出值和被控变量的实时和历史趋势查看方便,成本及维护费用低等优点,使得DCS或PLC控制系统中的软调节器代替了大部分的PID调节器模块。
在连续生产的化工行业,温度、压力等被控变量控制精度要求较高,不允许较大的波动和超调现象出现。
在实际生产过程中,P、I、D调节参数的投用切除和参数值的修改都会引起调节品质的变化,而且三个参数都对调节品质有影响,所以需要足够的经验才可以将PID调节器参数调至合适。
在实际的生产过程中,被控变量达到调节要求并趋于稳定后,调节参数不能随意修改,即使遇到有调节需要的仪表回路,有可能因为调节参数设置不当,造成被调参数的振荡,导致物料的浪费甚至停车事故,所以在生产过程中工艺及自控人员没有足够多的机会去积累PID调节方便的经验,在停车检修过程中,又没有真实生产过程供工艺及自控人员练习。
西门子STEP7是西门子S7 300\400系列PLC的组态编程环境,其仿真环境PLCSIM可以很好的模拟S7 300\400系列PLC控制器和用户程序的运行。
西门子S7 300\400系列PLC具有强大的PID控制功能,并具有FB41(连续控制器)、FB42(步进控制器)、FB43(脉冲发生器)、用于温度控制的FB58和FB59等PID相关的功能块和相应的系统功能块,并可以通过软件来实现自整定功能。
WinCC与STEP7变量同步修改的问题

WinCC与STEP7变量同步修改的问题
现在遇到两个问题,请指教。
问题一:STEP7中的符号表和DB块,通过操作员监控和S7_m_c=true,再编译OS,就可以在WinCC里面变量管理的SIMATICS7PROTOCOLSUITE出现并调用,这个小弟明白,我的问题是,我在STEP7里面重新更改符号表或者DB块里变量的名称后,再次编译OS,尽管WinCC里变量管理的STEP7变量更新了,但是IO域等连接的变量,名称却没变,怎么同步图形编辑器或其他应用(如报警记录和用户归档之类的),能无论某地址的变量名称如何变化只按照变量的地址连接变量吗?
问题二:在连接变量的时候,会有两个SIMATICS7PROTOCOLSUITE出现,一个在项目名称下,一个在WinCC变量下,两者的区别是什么,各自怎么使用,WinCC变量下的我以为做了修改STEP7会有响应,项目名称下的呢?还有来自STEP7符号数据源的变量,这个数据源又是怎么用的?附图一张。
图片说明:1,问题二对应的对话框
最佳答案
1、变量名称修改后再重新上传,wincc的变量名称随即更新,但是画面窗口使用的变量不会随着其变化,wincc没有这个功能,只能逐一修改。
2、一个是项目的总文件,一个是项目单独变量。
因为在下位机上可以创建多个项目。
使用Step 7编写的PID控制模块

使用Step 7编写的PID控制模块1、说明:程序是用Step 7编写的。
带"_IN"与带"_OUT"的变量,如果前缀是一样的,要求连接同一个变量。
这段程序已经在温度控制上运行通过了。
2、代码如下:FUNCTION FC1 : VOIDV AR_INPUTRun:BOOL; //True-运行,False-停止Auto:BOOL; //True-自动,False-手动ISW:BOOL; //True-积分有效,False-积分无效DSW:BOOL; //True-微分有效,False-微分无效SetMV:REAL; //手动时的开度设定值SVSW:REAL; //当设定值低于SVSW时,开度为零PV:REAL; //测量值SV:REAL; //设定值DeadBand:REAL; //死区大小PBW:REAL; //比例带大小IW:REAL; //积分带大小DW:REAL; //微分带大小dErr_IN:REAL; //误差累积LastPV_IN:REAL; //上一控制周期的测量值END_V ARV AR_OUTPUTMV:REAL; //输出开度dErr_OUT:REAL; //误差累积LastPV_OUT:REAL;//上一控制周期的测量值END_V ARV ARErr:REAL; //误差dErr:REAL; //误差累积PBH:REAL; //比例带上限PBL:REAL; //比例带下限PVC:REAL; //测量值在一个控制周期内的变化率,即测量值变化速率P:REAL; //比例项I:REAL; //积分项D:REAL; //微分项END_V ARIF Run=1 THENIF Auto=1 THENIF SV>=SVSW THENErr:=SV-PV;PBH:=SV+PBW;PBL:=SV-PW;IF PV<PBL THENMV:=1;ELSIF PV>PBH THENMV:=0;ELSEP=(PBH-PV)/(PBH-PBL); //计算比例项//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// //以下为积分项的计算////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////IF ISW=1 THENdErr:=dErr_IN;IF (PV<(SV-DeadBand)) OR (PV>(SV+DeadBand)) THENIF (dErr+Err)<(0-IW) THENdErr:=0-IW;ELSIF (dErr+Err)>IW THENdErr:=IW;ELSEdErr:=dErr+Err;END_IF;END_IF;I:=dErr/IW;dErr_OUT:=dErr;ELSEI:=0;END_IF;//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// //以上为积分项的计算//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// //////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// //以下为微分项的计算////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////IF DSW=1 THENPVC:=LastPV_IN-PV;D:=PVC/DW;LastPV_OUT:=PV;ELSED:=0;END_IF;//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////以上为微分项的计算////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////IF (P+I+D)>1 THENMV:=1;ELSIF (P+I+D)<0 THENMV:=0;ELSEMV:=P+I+D;END_IF;END_IF;ELSEMV:=0;END_IF;ELSEMV:=SetMV;END_IF;ELSEMV:=0;END_IF;END_FUNCTION。
利用PLCSIM实现STEP7的在线调试并与WICC的连接监控

1引言
在学习西门子的编程软件(SIMATIC STEP7,SIMATICWICC)过程中,如果只用STEP7编程和WINCC做图像的话,会比较枯燥乏味,大家可能都想找这样一个软件,就是能够实现STEP7程序的调试和WINCC的监控功能,下面就详细介绍实现这三个软件互联的方法。
图9选择Compile
图10选择Compile的编译画面1
图11选择Compile的编译画面2
最后会出现一个提示框,问是否需要查看日志,单击No,结束编译。
(4)设置PG/PC Interface
在控制面板中,双击Set PG/PC Interface,设置如图12,在MPI的属性中,设置与PLCSIM(图5的右下角)的MPI地址相同。
图7插入OS
(2)修改变量控制属性
在图3的变量列表中,将View->Columns R,O,M,C,CC选中,然后选中全部的变量,将属性修改为如图8所示。然后单击保存后退出符号编辑器。
图8修改变量控制属性
(3)编译项目
在图7TEST_5上单击右键,选择Compile,如图9,单击Next-Next-Compile,出现如图10与图11所示画面。
图5将运行模式调到RUN
在图5的IB悬浮窗上将地址0和1选上,如图6,就可以看见QB的输出位QB0.0已经接通。
图6选地址
2.3建立与WINCC的连接
(1)插入OS
在图2的项目名称TEST_5上单击右键,在弹出的选项中按Insert New Object->OS(如图7),并将其改名为TEST_5。
设置MPI的参数,右键单击S7$Program(1),选择属性,在弹出对话框中左键单击属性,在连接参数对话框中,设置站地址和PLCSIM,PG/PC Interface的地址相同(图14),编辑好一个画面,在画面上添加三个输入输出域,组态对话框和变量连接,然后激活WINCC,在PLCSIM中打开和关闭IB0.0,IB0.1,就可以看到WINCC画面的输出值与PLCSIM中的变量值一致(如图15)。
基于Step7和WinccFlexible联合仿真教程
基于Step7和WinccFlexible联合仿真教程目录0 项目要求:..................................................................... .............................................. 2 1 项目分析与规划: .................................................................... .................................... 2 2 系统IO口分配:..................................................................... ..................................... 2 3 系统接线原理图: .................................................................... .................................... 2 4 系统控制方式规划:..................................................................... .. (2)5 系统硬件选择与组态...................................................................... . (3)6 PLC程序设计...................................................................... ........................................ 197 触摸屏通讯设置、画面设计与变量控制.......................................................................25 8 项目仿真测试 ............................................................................................................. 37 9 现场联机调试 ..................................................................... . (42)0 项目要求:(1)有一台三相交流异步电动机,可以用操作站上的按钮控制,也可以用监控站的触摸屏控制;(2)操作站安装有三个按钮SB1、SB2和SB3,其中按钮SB1可以实现电动机的点动控制,按钮SB2控制电动机的连续运行,按钮SB3用来控制电动机的停止。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工业控制
基于 WinCC 和 STEP7 的 PID 控制
罗庚兴, 宁玉珊
(广东松山职业技术学院电气系, 广东韶关 512126)
摘要: 介绍了一种基于 WinCC 和 S7-300 PLC 实现 PID 控制的方法, 利用 FB41 功能模块实现 PID 控制, 通过 WinCC 进行 实 时 监
等 。 进 入 CPU 属 性 窗 口 , 设 置 站 点 的 MPI 地 址 (假 设 为
23)。 打 开 模 拟 量 输 入 模 块 , 设 置 模 拟 量 输 入 参 数 为 : 测
量类型 E, 测量范围 1~5V。 打开模拟量输出模块, 设置模
拟量输出参数 为 : 输 出 类 型 I, 输 出 范 围 4~20mA, 如 图 3
实 际 温 度 值 (℃ ) , DBD.DBD14 存
图 2 控制系统组成
放 执 行 器 手 动 开 度 给 定 值 (% ) , DBD.DBD18 存 放 执 行 器 实 际 开 度
2.2 控制系统组成
值 (%), DBD.DBD26 存 放 增 益 给 定 值 。 此 外 , 还 分 配 了
实现以上控制要求的系统组成如图 2 所示。 该系统是 由 执 行 器 、 换 热 器 、 温 度 变 送 器 、 A / D 转 换 器 、 PID 调 节 器和 D / A 转换器等构成一个单回路温度控制 系 统 。 PID 调 节 器 、 D / A 和 A / D 转 换 器 用 西 门 子 公 司 的 S7 -300 CPU315-2DP 型 PLC 来 实 现 。 上 位 机 PC 中 安 装 了 STEP7 V5.2 编 程 软 件 和 WinCC V6.0 组 态 软 件 。 PC 与 PLC 之 间
温度的给定值和实际值的电压存放形式地址, 分配了执行 器开度给定值和实际值的电流存放形式地址。 上述地址均 采 用 REAL 数 据 类 型 。 DB1.DBD30 用 来 存 放 积 分 时 间 常 数, 数据类型为 TIME。
逻 辑 控 制 信 号 , 如 手 动 / 自 动 切 换 , CRT / 本 地 工 作 方 式切换等信号, 也可以在 DB1 中设置。
FC106 用 于 将 模 拟 量 实 型 值 转 换 为 I / O 格 式 的 整 型 值 [ 2] 。 DB1.DBD22 是 执 行
器开度电流形式的实型值。
电 动 执 行 器 的 量 程 上 限 4mA
和 下 限 20mA 分 别 对 应 上 限
值 HI_LIM 和 下 限 值
LO_LIM。 M20.0 默 认 为 0,
图 4 共享数据块 DB1
所示。 安装模拟量输入模块前, 必须根据输入信号种类正 确 设 置 量 程 卡 , 对 于 1~5V 的 模 拟 量 电 压 输 入 , 量 程 卡 选 择为 B 位置。
编译并生成系统数据包。 在硬件组态窗口下载硬件组 态, 在选择节点地址窗口搜寻可访问置方便等优点。
关键词: 实时监控; WinCC 组态; PID; PLC; 编程
中图分类号: TP273
文献标识码: A 文章编号: 1009-9492 (2009) 01-0039-04
1 引言
PID 控 制 器 是 应 用 最 广 泛 的 闭 环 控 制 器 , 由 于 其 结 构 简单, 容易实现, 不需要被控对象的数学模型, 有较强的 灵活性和适应性, 所以现在有 90%以上的 闭 环 控 制 都 采 用 PID 控 制 器 。 STEP7 提 供 丰 富 的 PID 控 制 功 能 模 块 , 可 以 很方便的创建 PID 控制器和处理 设 定 值 、 过 程 反 馈 值 及 对 控制器的输出值进行后处理。 组态软件 WinCC 是数据采集 监控系统 SCADA 的软件平台工具 [1], 利用 WinCC 不仅可 以实现对闭环控制过程的监视, 而且还可以通过 WinCC 的 组态界面实时设置和修改 PID 参数, 避免了在 STEP7 中每 次调试 PID 控制, 都得修改参数并下载程序。
4 WinCC 组态设计
4.1 创建项目及通讯设置
打 开 WinCCExplorer 窗 口 , 创 建 一 个 名 为 “ Temp - Ctrl-23” 的 WinCC 单用户项目。 在变量管理器下添加驱动 “SIMATIC S7 PROTOCOL SUITE”, 如 图 7 所 示 , 在 MPI 下 建 立 名 为 “PLC1” 新 驱 动 程 序 的 连 接 , 设 置 站 地 址 为 23, 机 架 号 为 0, 插 槽 号 为 2。 这 样 就 建 立 WinCC 项 目 与 MPI 地址为 23 的 PLC 站点之间的通讯。
用 PC Adapter 连接。
考虑温度控制属于大滞后系统, 调节器采用 PI 类型。
3 STEP7 程序设计
3.1 硬件组态及参数设置
在 STEP7 中创建一个温度控制系统的项目, 在项目下
生 成 一 个 S7-300 的 站 点 。 进 入 HW Config 界 面 , 按 硬 件
安 装 次 序 和 订 货 号 依 次 插 入 机 架 、 电 源 、 CPU、 I / O 模 块
外部变量名称 CRT / 本地方式
MAN / QUTO 确定按钮 给定温度 实际温度 手动开度 执行器开度 增益
积分时间常数
数据类型 二进制变量 二进制变量 二进制变量 32 位浮点数 32 位浮点数 32 位浮点数 32 位浮点数 32 位浮点数 有符号 32 位数
通讯参数 DB1.DBX0.0 DB1.DBX0.1 DB1.DBX0.2 DB1.DBD2 DB1.DBD10 DB1.DBD14 DB1.DBD18 DB1.DBD26 DB1.DBD30
2 系统组成
我 们 通 过 某 换 热 器 温 度 控 制 模 拟 系 统 来 具 体 讲 解 PID 控制的编程和监控功能的实现过程。
2.1 控制对象组成及控制要求
温度控制系统如图 1 所示。 换热器用于实现蒸汽和介 质 (如水) 之间的热量交换。 蒸汽的流量由电动执行器 (电流型 4~20mA) 控制, 热介质的温度由温度变送器 (电 压 型 1~5V) 采 集 。 冷 介 质 、 热 介 质 、 蒸 汽 出 口 等 的 管 道 阀门均为手动阀。
控制要求如下: 1) 初始状态 电动执行器阀门关闭, 两手操电位器控制的阀门处于 较小的开度。 2) 本地控制方式 接通启动开关, 系统按监控画面给定的温度, 控制电 动执行器动作, 进行温度的 PI 调节。 断开开关, 电动执行
图 1 温度控制系统示意图
器关闭。 3) 远程控制方式 自动模式下, 系统按给定的温度, 进行 PI 调节; 手动
图 6 FB41 程序
图 7 设置 WinCC 的 MPI 通讯参数
4.2 建立外部过程变量
在 名 称 为 “PLC1” 的 连 接 下 , 按 表 1 建 立 WinCC 的 外部变量与 PLC 的通讯连接。
41
工业控制
机电工程技术 2009 年第 38 卷第 01 期
表 1 WinCC 的外部变量
模式下, 系统按手动给定的电动执行器开度工作, 此开度 由监控画面输入和显示。
本地控制方式和远程控制方式由监控界面切换。 当方 式 信 号=0 时 为 本 地 控 制 方 式 ; 当 方 式 信 号=1 时 为 远 程 控 制方式。
温 度 变 送 器 电 压 1~5V 对 应 的 温 度 范 围 为 0℃~100℃。 电 动 执 行 器 电 流 4~20mA 对 应 的 阀 门 开 度 为 0~100%, 要 求在监控界面上显示的温度和阀门开度的单位分别为℃ 和%。
到 PLC 中。 在 WinCC 启动属性卡中 标 记 “图 形 运 行 系 统 ” 和 “变 量 记 录 运 行 系 统 ”, 激 活 WinCC。 进 入 曲 线 图 , 可 以监控温度、 阀门开度的运行情况。 图 9 中, 设置增益为 8.3, 积分时间常数为 8.3s。 当给定温度从 20℃跃变到 40℃ 时, 阀门开度迅速增加, 温度上升, 经过两个多振荡后,
40
机电工程技术 2009 年第 38 卷第 01 期
工业控制
图 5 模拟量输入输出数据的规范化处理
在 启 动 时 执 行 组 织 块 OB100 中 调 用 FB41, 用 于 实 现
PID 控制器的初始化操作。 程序如下:
S DB2.DBX 0.0 / / 重启动 PID, 复位 PID 内部参数
4.3 组态过程画面和趋势画面
用图形编辑器创建一个名为 “启动主画面” 的温度控 制过程画面。 如图 8 所示, 编辑画面窗口。 添加相应的输 入输出。
图 8 温度控制主画面
在变量记录下, 建立一个过程值归档。 对给定温度、 实际温度和执行器开度 3 个过程变量进行归档。 设置采集 类型为周期-连续, 采样周期为 1s, 归档周期为 2s。
CALL FB41, DB2
/ / 调用 FB41
COM_RST: = DB2.DBX0.0
MAN_ON: =
……
/ / 其它参数不用赋值
R DB2.DBX 0.0
/ / 进入正常运行
在 OB35 中 调 用 连 续 PID 控 制 功 能 块 FB41。 OB35 执
行的时间间隔即 PID 控制器运行的周期, 在 CPU 属性设置
对 话 框 的 循 环 中 断 选 项 卡 中 设 置 , 最 大 为 10000ms, 本 控
制系统中设置为 1s。 OB35 中的程 序 如 图 6 所示。
图 6 中 , Q8.0·Q8.1 表 示 CRT 控 制 方式下的手动操作模式, Q8.0·I24.1 表示 本 地 控 制 方 式 下 , 断 开 I24.1, 关 闭 PID 功 能 。 SP_INT 输 入 DB1.DBD6 中 电 压 形 式 的 温 度 给 定 值 。 PV_IN 输 入 DB1. DBD34 中 电 压 形 式 的 实 际 温 度 值 。 MAN 输 入 DB1.DBD22 中 电 流 形 式 的 实 际 阀 门 开 度 值 。 GAIN 输 入 实 型 增 益 。 TI 输 入 DB1.DBD30 中 TIME 类 型 的 积 分 时 间 常 数 。 TD 微 分 时 间 常 数 取 0。 DEADB_W 设 置 死 区 宽 度 为 0.0002。 LMN_HLM 设 置 控 制 器 输 出 上 限 值 为 20mA。 LMN_LLM 设 置 控 制 器 输 出 下 限 值 为 4mA。 LMN 输 出 电 流 形式的实际阀门开度值存放到 DB1.DBD22 中。