GSB充电桩充电模块CAN通讯协议V1.03
国标充电桩通讯协议(一)

国标充电桩通讯协议(一)国标充电桩通讯协议什么是国标充电桩通讯协议?国标充电桩通讯协议是指符合国家标准的充电桩通讯协议,主要通过定义通讯协议格式、通讯命令和数据交互内容等方式实现充电桩与后台服务器之间的通讯。
国标充电桩通讯协议的作用国标充电桩通讯协议定义了充电桩与后台服务器之间的通讯标准,使得充电桩可与各个品牌的后台服务器进行通讯交互,从而实现智能化充电管理、统计充电数据等功能。
同时,也使得充电桩产品具备了更好的互操作性。
国标充电桩通讯协议的标准目前,我国电动汽车充电基础设施建设采用的通讯标准有两种,分别为GB/T 27930和GB/T 18487.1。
其中,GB/T 27930主要适用于电动汽车充电站及其所提供的交直流充电服务,而GB/T 18487.1则适用于电动汽车直流快速充电设施。
国标充电桩通讯协议的内容国标充电桩通讯协议包含以下内容:•数据格式:定义了通讯数据格式,包括数据位数、校验位、数据类型等;•通讯命令:定义了充电桩与后台服务器之间通讯所使用的数据命令;•数据交互内容:规范了充电桩与后台服务器之间的数据类型、数据内容等。
国标充电桩通讯协议的意义实现国标充电桩通讯协议,可以让不同品牌的充电桩之间实现互通互联,从而推动电动汽车市场的发展。
同时,也使得充电桩与后台服务器之间的通讯更为稳定、高效,提升了电动汽车充电的体验。
国标充电桩通讯协议的未来随着电动汽车市场的发展,国标充电桩通讯协议将继续升级迭代,以适应不断变化的市场需求。
未来,充电桩通讯协议的标准化和普及将成为电动汽车产业发展的关键支撑之一。
国标充电桩通讯协议的优势采用国标充电桩通讯协议的充电桩具有以下优势:•具有更好的通讯稳定性和可靠性,能够避免通讯过程中的数据丢失和错位问题;•具备更高的通讯效率,可以大大降低通讯的响应时间;•能够实现与不同品牌的高兼容性,避免充电桩之间挑选的问题;•方便后期维护和升级,提高产品的可维护性和可扩展性。
电动汽车充电站充电设施CAN总线通讯规范

电动汽车充电站充电设施CAN总线通讯规范(BMS、充电桩、充电机、后台)1、通讯规范数据链路层应遵循的原则总线通讯速率为:250Kbps,根据现场实际情况,可能改成125K。
以250K为主,125K备用数据链路层的规定主要参考CAN2.0B的相关规定。
使用CAN扩展帧的29位标识符并进行了重新定义,以下为29位标识符的分配表:其中,1位PRI 为报文优先级(0:高优先级;1:普通报文);2位Resv 为保留位,填03位DestAddr 为目标地址(1-14表示设备地址,15表示广播地址;0:保留;1:后台监控系统;2:充电柱;3:BMS;4:CCS) 4位SourceAddr 为源地址(1-14表示设备地址,15表示广播地址;0:保留;1:后台监控系统;2:充电柱;3:BMS;4:CCS) 8位FunctionCode 为报文的功能码;(0-255见后续定义)10位InfoCode 为报文的信息码;(0-1023见后续定义)单体FunctionCode表示功能码,指报文内容属于任何种功能类型,定义如下:=0对时报文=1申请读取数据/回答读取数据=2申请写入数据/回答写入数据(不带返校)=3遥控操作/遥控返校=4遥控执行/执行返校=5主动上送数据(广播发送)=6主动上送数据(点对点)……..InfoCode表示信息码,指报文数据区的信息类型,定义如下:=0 保留,当不属于以下定义的信息类型时,可填0=001-400 综合类数据,可由双方约定每种报文帧的数据结构(现未用)=401-600 直流测量值数据401~600=总数据及报警参数;407=每箱电池是否有温度;//最大64箱408~415=上送箱中电池支数;//最大64箱420~519=单体电压;//最多400个单体电压520~535=每箱电池的温度;//最大64个温度,传输每箱电池的最高温度536~551=每箱电池的温度;//最大64个温度,传输每箱电池的最低温度552=车量唯一编号(整车充电时)553-568-=每箱电池唯一编号//最大64个编号,传输每箱电池的唯一编号690=BMS发送广播帧充电参数695=CCS发送数据及状态=701~800 交流测量值数据:701:监控后台输出实时电度表值702:直流充电桩输出计算电量=801~899 状态量数据 801=CCS发送控制命令=900 SOE数据=901 BMS控制输出(控制充电机)=902 监控后台控制输出(控制充电机)=903 充电桩控制输出(控制充电机)=904 后台对时报文,充电机、充电桩接受对时=904-999 其它控制输出(后续再定义)=1000-1023 保留报文按帧为单位发送和接收,每帧报文含8字节有效数据,末用的字节填0,根据FunctionCode与InfoCode,分别定义每种帧的数据区内容。
国标充电桩通讯协议

国标充电桩通讯协议
国标充电桩通讯协议是指充电桩与车载 BMS 电池管理系统之间
的通信协议。
根据最新发布的《电动汽车充电接口及通信协议国家标准》(GB/T 32185-2018) 规定,充电桩与车载 BMS 之间的通信采用CAN 通讯方式。
在充电桩与车载 BMS 之间的通信中,充电桩会发送一系列的帧ID,车载 BMS 会对这些帧 ID 进行识别,并根据国标协议对报文内
容进行解析。
具体来说,国标充电桩通讯协议包括以下帧 ID:
- 充电请求帧 ID:用于充电桩向车载 BMS 发送充电请求。
- 充电应答帧 ID:用于车载 BMS 向充电桩发送充电应答。
- 充电状态帧 ID:用于充电桩向车载 BMS 发送充电状态信息。
- 充电完成帧 ID:用于充电桩向车载 BMS 发送充电完成信息。
- 故障帧 ID:用于充电桩向车载 BMS 发送故障信息。
充电桩与车载 BMS 之间的通信协议采用 CAN 通讯方式,充电桩会发送一系列的 CAN 报文,车载 BMS 会对这些报文进行识别和解析,以实现充电桩与车载 BMS 之间的通信。
具体 CAN 报文格式可以参考国标协议。
地面交流充电桩的无线通信技术及通信协议

地面交流充电桩的无线通信技术及通信协议随着电动交通工具的快速发展,地面交流充电桩的无线通信技术及通信协议在充电基础设施的建设和智能化管理中起到了至关重要的作用。
本文将深入探讨地面交流充电桩的无线通信技术及通信协议,以帮助读者更好地了解这一领域的发展和应用。
一、地面交流充电桩的无线通信技术在充电桩的无线通信技术中,近年来最常见的技术包括无线通信模块和远程控制技术。
1. 无线通信模块无线通信模块是实现充电桩和管理系统之间无线通信的关键技术。
目前,主要采用的无线通信技术包括GPRS、CDMA和LTE等。
其中,GPRS是一种广泛应用于数据传输的无线通信技术,其具有覆盖范围广、传输速度快的特点,适用于充电桩和管理系统之间的数据传输。
CDMA是一种基于码分多址的无线通信技术,具有抗干扰能力强和频谱利用率高的特点,适用于密集城区的充电桩通信。
而LTE 是一种第四代移动通信技术,具有高速率、低时延和大容量的特点,适用于大规模充电桩网络的无线通信。
2. 远程控制技术远程控制技术是实现远程监控和管理充电桩的重要手段。
目前,主要采用的远程控制技术包括无线网络技术和蓝牙技术等。
无线网络技术包括Wi-Fi和ZigBee 等,通过无线网络与充电桩进行连接,实现对充电桩的远程监控和控制。
蓝牙技术则可以实现充电桩与用户智能手机之间的无线通信,方便用户远程控制充电桩的状态和参数。
二、地面交流充电桩的通信协议为了实现地面交流充电桩的信息交换和互操作性,制定了一系列通信协议标准。
以下是目前主要采用的通信协议。
1. OCPP (Open Charge Point Protocol)OCPP是一种开放式的充电桩通信协议,旨在实现不同类型充电桩与管理系统之间的兼容性。
OCPP将充电桩分为中心系统(Central System)和充电点(Charge Point),通过交换消息实现两者之间的通信。
该协议具有开放性和兼容性强的特点,被广泛应用于充电桩的远程监控、控制和账单管理等。
交流充电桩和充电机的can总线协议

交流充电桩和充电机的can总线协议
充电桩和充电机之间的CAN总线协议通常被称为CANopen
协议。
CANopen是一种应用层通信协议,用于在CAN总线上
实现设备之间的通信。
CANopen协议定义了一系列标准化的对象和通信过程,以便
在充电桩和充电机之间进行数据交换和控制。
充电桩和充电机作为CANopen网络中的节点,通过发送CAN帧进行通信。
在CANopen协议中,充电桩和充电机通过定义的对象字典进
行数据交换。
对象字典包含了一系列对象,每个对象都有唯一的标识符,用于在节点之间进行读取和写入数据。
例如,充电桩可以向充电机发送充电请求消息,并通过读取充电机的状态信息来监控充电过程。
除了数据交换,CANopen协议还定义了一系列的通信过程,
如心跳检测、节点配置和状态转换等。
这些过程确保了充电桩和充电机之间的稳定和可靠的通信。
总而言之,CANopen协议是一种用于充电桩和充电机之间进
行数据交换和控制的通信协议。
它通过定义的对象字典和通信过程来实现节点之间的通信,并确保了稳定和可靠的充电过程。
纯电动车BMS与整车系统CAN通信协议

文件类型:技术类密级:保密正宇纯电动车电池管理系统与整车系统CAN通信协议(GX-ZY-CAN-V1.00)版本记录版本制作者日期说明V1.00 用于永康正宇纯电动车系统姓名日期签名拟定审查核准1 范围本标准规定了电动汽车电池管理系统(Battery Management System ,以下简称BMS)与电机控制器(Vehicle Control Unit ,简称VCU)、智能充电机(Intelligent Charger Unit ,简称ICU)之间的通信协议。
本标准适用于电动汽车电池管理系统与整车系统和充电系统的数据交换。
本标准的CAN 标识符为29位,通信波特率为250kbps 。
本标准数据传输采用低位先发送的格式。
本标准应用于正宇纯电动轿车电池管理系统。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的版本适用于本文件。
凡不是注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 11898-1:2006 道路车辆 控制器局域网络 第1部分:数据链路层和物理信令(Road Vehicles – Controller Area Network (CAN) Part 1:Data Link Layer and Physical Signalling). SAE J1939-11:2006 商用车控制系统局域网络(CAN)通信协议 第11部分:物理层,250Kbps ,屏蔽双绞线(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 11:Physical Layer,250Kbps,Twisted shielded Pair). SAE J1939-21:2006商用车控制系统局域网络(CAN )通信协议 第21部分:数据链路层(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 21:Data Link Layer).3 网络拓扑结构说明电动汽车网络采用CAN 互连结构如下所示,CAN1总线为电池管理系统与电机控制器之间的数据通信总线,CAN2总线为电池管理系统与充电机之间的数据通信总线。
(完整版)(国家电网)电动汽车充电站充电设施CAN总线通讯规范
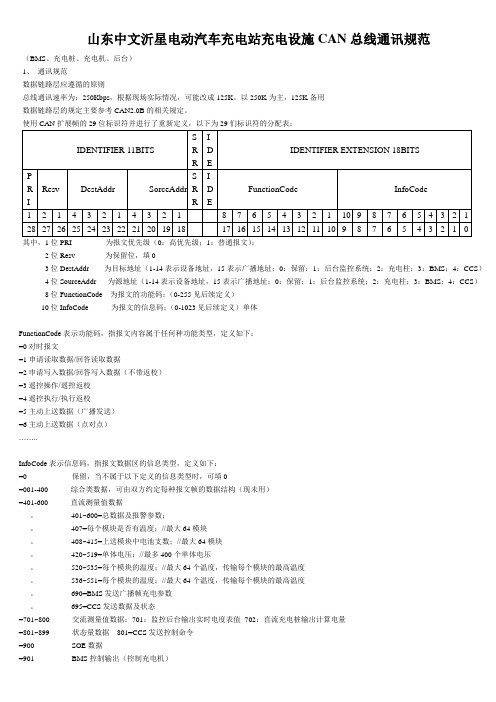
山东中文沂星电动汽车充电站充电设施CAN总线通讯规范(BMS、充电桩、充电机、后台)1、通讯规范数据链路层应遵循的原则总线通讯速率为:250Kbps,根据现场实际情况,可能改成125K。
以250K为主,125K备用数据链路层的规定主要参考CAN2.0B的相关规定。
使用CAN扩展帧的29位标识符并进行了重新定义,以下为29们标识符的分配表:其中,1位PRI 为报文优先级(0:高优先级;1:普通报文);2位Resv 为保留位,填03位DestAddr 为目标地址(1-14表示设备地址,15表示广播地址;0:保留;1:后台监控系统;2:充电柱;3:BMS;4:CCS)4位SourceAddr 为源地址(1-14表示设备地址,15表示广播地址;0:保留;1:后台监控系统;2:充电柱;3:BMS;4:CCS)8位FunctionCode 为报文的功能码;(0-255见后续定义)10位InfoCode 为报文的信息码;(0-1023见后续定义)单体FunctionCode表示功能码,指报文内容属于任何种功能类型,定义如下:=0对时报文=1申请读取数据/回答读取数据=2申请写入数据/回答写入数据(不带返校)=3遥控操作/遥控返校=4遥控执行/执行返校=5主动上送数据(广播发送)=6主动上送数据(点对点)……..InfoCode表示信息码,指报文数据区的信息类型,定义如下:=0 保留,当不属于以下定义的信息类型时,可填0=001-400 综合类数据,可由双方约定每种报文帧的数据结构(现未用)=401-600 直流测量值数据。
401~600=总数据及报警参数;。
407=每个模块是否有温度;//最大64模块。
408~415=上送模块中电池支数;//最大64模块。
420~519=单体电压;//最多400个单体电压。
520~535=每个模块的温度;//最大64个温度,传输每个模块的最高温度。
536~551=每个模块的温度;//最大64个温度,传输每个模块的最高温度。
纯电动车BMS与整车系统CAN通信协议

文件类型:技术类密级:保密正宇纯电动车电池管理系统与整车系统CAN通信协议(GX-ZY-CAN-V1.00)版本记录版本制作者日期说明V1.00 用于永康正宇纯电动车系统姓名日期签名拟定审查核准1 范围本标准规定了电动汽车电池管理系统(Battery Management System ,以下简称BMS)与电机控制器(Vehicle Control Unit ,简称VCU)、智能充电机(Intelligent Charger Unit ,简称ICU)之间的通信协议。
本标准适用于电动汽车电池管理系统与整车系统和充电系统的数据交换。
本标准的CAN 标识符为29位,通信波特率为250kbps 。
本标准数据传输采用低位先发送的格式。
本标准应用于正宇纯电动轿车电池管理系统。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的版本适用于本文件。
凡不是注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 11898-1:2006 道路车辆 控制器局域网络 第1部分:数据链路层和物理信令(Road Vehicles – Controller Area Network (CAN) Part 1:Data Link Layer and Physical Signalling). SAE J1939-11:2006 商用车控制系统局域网络(CAN)通信协议 第11部分:物理层,250Kbps ,屏蔽双绞线(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 11:Physical Layer,250Kbps,Twisted shielded Pair). SAE J1939-21:2006商用车控制系统局域网络(CAN )通信协议 第21部分:数据链路层(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 21:Data Link Layer).3 网络拓扑结构说明电动汽车网络采用CAN 互连结构如下所示,CAN1总线为电池管理系统与电机控制器之间的数据通信总线,CAN2总线为电池管理系统与充电机之间的数据通信总线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 字节 2 字节
4 字节
Byte0
Byte1 Byte2 Byte3
Byte 4 Byte 5 Byte 6 Byte 7
RMP
/
/
按位 均流微调 模块运行时间设置
设置 电压设置 (小时/四字节浮点数)
Byte2 位定义:
Bit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
RMP
设置模块开关机
更改原因
新拟制 更改电流设定范 围和上报精度 增加综合命令 0x00
更改说明
第一版 V1.02 V1.03
更改人
更改时间
2016-3-10 2016-9-11 2016-9-12
1、 硬件需求 1). CAN2.0B 协议标准接口
Page 3 of 12
通讯方式:CAN(Controller Area Network)总线 传输速率:125Kbps 数据格式:遵循CAN2.0B 协议标准,CAN 控制器的标志符长度29 位,即支持29 位标识符的扩展格式。 先传高位,再传低位。
2.2.1 ERR 错误位。如果节点接收到的数据包帧格式不符合协议规定,将此位置位传递给源节点。
2.2.2 MSGTYPE 命令信息类型。表示数据信息对应的类型。
2.2.3 ErrType 错误类型。表示数据信息错误原因。
Page 5 of 12
2.2.4 Data information 数据部分。
Byte7
备注 数据 单 格式 位
电压直接转为浮点数,4 个字节
V
电流直接转为浮点数,4 个字节
A
环境温度直接转为浮点数,4 个字节
℃
模块故障/告警状态,4 个字节
*
3.7 设置命令下发:(监控 to 充电模块)
MSGTYPE Byte0
ErrType Byte1
设模块 电压 设模块 限流点
0x03 0x03
2). 建议硬件支持
建议监控支持环境温度采样,然后通信CAN 通信向充电机模块发送此温度值。以便充电机模块根据此 温度值来进行高低温补偿,这样可使得充电机模块在全温度工作范围内都能取得最好的输出电压精度。
3). 建议通信接口
建议监控留出专门的CAN 通信接口,只与充电机模块进行通信,CAN 总线上勿要加入其它设备,以免 影响充电机模块的通信性能。
2.1.4 源地址 SRCADDR
源地址表示该帧是由哪个地址发出。源地址(0x00-0xFE)。
在所有通信类型中,bit3~bit10 用于指示总线上信息源的地址。 在系统中, PRONTO=0x060,整流模块的地址确定在 0x00~0x7F。 上级监控的地址都确定在 0xF0~0xF8。
2.1.5 CNT 后续数据标识。如果 CNT=1,表示数据包含下一帧,而且,它有相同的源地址和协议类型。如果PE ErrType VALUETYPE
VALUE
备注
1 位 7位
1 字节 2 字节
4 字节
Byte0
Byte1 Byte2 Byte3 Byte 4 Byte 5 Byte 6 Byte 7
0x1FD 0x01
0xf0
00
01
00
00
00
00
当 VALUETYPE=0X0001 时,发送
Byte 5
Byte 6
Byte 7
当 VALUETYPE=0X0001 时,回复模块输出电压。根据 VALUETYPE 值,模
块回复数据电压。
3.4 VALUETYPE 数据类型(VALUETYPE)及对应的 VALUE 数值格式:
序号
VALUETYPE
数据功能
1
0x0001
取模块电压
2
0x0002
监控下发数据标识 请求字节数据 模块上传数据标识 应答请求 监控下发数据标识 请求位数据 模块上传数据标识 应答请求 监控下发数据标识 设置数据 模块上传数据标识 应答设置
综合命令 0 按字节读取数据
说明
VALUETYPE:0x01,0x02,0x03,0x04,0x05,0x07, 0x40,0x54,0x58 VALUETYPE:Ox01,0x02,0x03,0x04x,0x05,0x07,0x0 B,0x54,0x58
00H 时,即 S=0,E=129,M=221,则:浮点数值=(1+221×2-23)·2129-127=5.0。如浮点数 60,对应四字节 ascii 码:42,70,
00,00,总线发送顺序为 42,70,00,00。如浮点数 1.2,对应四字节 ascii 码:3f,99,99,9a,总线发送顺序为 3f,99,
PTP 目的地址 DSTADDR (8 bits)
源地址 SRCADDR(8 bits) CNT RES1 RES2
2.1.1 协议号 PROTNO (Protocol No)
协议号描述各高级单元之间通信使用的协议。
Page 4 of 12
0x060 RMP Rectifier Monitor Protocol 监控模块与整流模块标识符
模块的运行时间,模块开机后,监控单元读出模块保存在 eeprom 中的该数据,同时每隔一小时,对该数据加一。模块接收该
数据并刷新保存至 eeprom 中。
浮点数发送顺序: 浮点数的存储格式为四个字节,转换为 HEX-ASCII 码后传输,发送时按阶码及符号位、尾数高位、尾数中
位和尾数低位的先后顺序发送四个字节。浮点数采用 IEEE32 位标准浮点数格式(标准 C 语言浮点数格式),长度为 32bits,格
设 置 模 块 过 设置模块 模 块 风 扇 模 块 通 信 过压脱离继电 CAN
压复位
是
否 是否全速 绿灯闪烁 器动作
初始化
WALK-IN
0
0:正常
0:禁止 0:自动 0:正常 0:正常
0:正常
1:复位
1:使能 1:全速 1:闪烁 1:脱离
1:复位
Byte3 定义:
Bit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
Bit0 交流过压 保护允许
0:允许 1:禁止
Page 6 of 12
RMP
均流微调电压设置,针对整流模块而言,无符号字节型数据,128 代表电压不做调整,增大或减小代表
输出电压升高或减小,步进 1 代表模块调整输出电压的最小给定步进。
Byte4,Byte5,Byte6,Byte7 定义:
回复模 块输出 电压 回复模 块输出 电流 回复环 境温度 回复当 前告警/ 状态
0x41 0x41 0x41 0x42
0xf0 0xf0 0xf0 0xf0
0x0001 0x0002 0x000B 0x0040
00
00
00
00
A
00
00
00
00
℃
00
00
00
00
*
Byte4
Data Info Byte5 Byte6
取模块电流真实值
3
0x0003
取模块限流点
4
0x0004
取模块散热器温度
5
0x0005
取模块输入 AC 综合相电压
6
0x0007
取模块电流显示值
7
0x000B
读取环境温度
数据格式
格式说明
4 bytes 浮 点 数 4 bytes 浮 点 数 4 bytes 浮 点 数 4 bytes 浮 点 数 4 bytes 浮 点 数 4 bytes 浮 点 数 4 bytes 浮 点 数
ErrType 0xf0 0xf1 0xf2 0xf3 0xf4
意义 无错误,正常响应 节点地址无效 命令无效 数据校验错误 地址识别过程中
3.协议命令说明
3.1 MSGTYPE 命令信息类型。表示数据信息对应的类型。
MSGTYPE 意义
0x00
监控下发数据标识 请求数据
监控上传数据标识
0x01 0x41 0x02 0x42 0x03 0x43
2.1.2 PTP 点对点位。PTP=0,表示该帧为广播信息。PTP=1 时,表示该帧为点对点信息。例如,在对所有的节点广播命令时,PTP=0
时,目的地址设置为 0xFF。
2.1.3 目的地址 DSTADDR
目标地址表示该帧发往哪个地址。目的地址(0x00-0xFE)。
如果 PTP=1,bit11~bit18 被作为点对点通信的目的地址。
应用范围:用于监控模块和充电模块之间的 CAN 通讯,以及充电模块之间的 CAN 通讯。
2、 帧格式
帧是传送信息的基本单元。CAN2.0B 帧格式如下表所示:
说明 代码 帧起始符 sof(1bit) 仲裁域 标识符(11bit)
SRR IDE 标识符(18bit) RTR 控制码 reseal(2 bits) Data Len(4 bits) 数据域 数据(8bytes) 校验码 CRC(2bits) 结束符 (7bits)
请求数据命令,读取模块输出
电压
模块上传(回复监控)数据帧格式:
PROTNO ERR MSGTYPE ErrType VALUETYPE
VALUE
Page 7 of 12
0x1FD
1 7位 位 Byte0 0x41
1 字节 2 字节
4 字节
Byte1 0xf0
Byte2 00
Byte3 01
Byte 4
V
Page 8 of 12
块输出
电压
读取模
块 输 出 0x01
0xf0