由正弦结构图产生的莫尔条纹各影响因素分析
莫尔条纹
莫尔条纹机电科学与工程系电子信息工程莫尔条纹是十八世纪法国研究人员莫尔先生首先发现的一种光学现象。
所谓莫尔条纹,是两条线或两个物体之间以恒定的角度和频率发生干涉的视觉结果,当人眼无法分辨这两条线或两个物体时,只能看到干涉的花纹。
数控方面的莫尔条纹是由光栅固定在机床活动部件上,读数头装在机床固定部件上,并且两者相互平行放置,在光源的照射下形成明暗相见的条纹。
莫尔条纹具有如下特点:变化规律,两片光栅相对移过一个栅距,莫尔条纹移过一个条纹距离。
由于光的衍射与干涉作用,莫尔条纹的变化规律近似正(余)弦函数,变化周期数与光栅相对位移的栅距数同步;放大作用,在两光栅栅线夹角较小的情况下,莫尔条纹宽度W和光栅栅距ω、栅线角θ之间有下列关系(θ的单位为rad,W的单位为mm),由于倾角很小,sinθ很小,则W=ω /θ,若ω=0.01mm,θ=0.01rad,则上式可得W=1,即光栅放大了100倍;均化误差作用,由若干光栅条纹共用形成莫尔条纹,例如每毫米100线的光栅,10mm宽度的莫尔条纹就有1000条线纹,这样栅距之间的相邻误差就被平均化了消除了由于栅距不均匀、断裂等造成的误差。
莫尔条纹现象是由于信号取样频率接近感光器分辨率所致,通常解决方法用一个低通滤镜把高于感光器分辨率的信号挡住,其副作用就是降低成像分辨率。
因此在设计低通滤镜时设计师要在分辨率和莫尔条纹之间做一个妥协选择。
因为D70的CCD前面使用效果比较弱的低通滤镜,所以在提高成像分辨率也造成了莫尔条纹出现几率的增大,此现象也广泛出现于其他DSLR上。
根据莫尔条纹的形成原理制成了光栅尺位移传感器,其工作原理是,当使指示光栅上的线纹与标尺光栅上的线纹成一角度来放置两光栅尺时,必然会造成两光栅尺上的线纹互相交叉。
在光源的照射下,交叉点近旁的小区域内由于黑色线纹重叠,因而遮光面积最小,挡光效应最弱,光的累积作用使得这个区域出现亮带。
相反,距交叉点较远的区域,因两光栅尺不透明的黑色线纹的重叠部分变得越来越少,不透明区域面积逐渐变大,即遮光面积逐渐变大,使得挡光效应变强,只有较少的光线能通过这个区域透过光栅,使这个区域出现暗带。
形成莫尔条纹的光学原理莫尔条纹通常

二、莫尔条纹莫尔条纹是光栅式传感器工作的基础。
(一)形成莫尔条纹的光学原理莫尔条纹通常是由两块光栅叠加形成的,为了避免摩擦,光栅之间留有间隙,对于栅距较大的振幅光栅,可以忽略光的衍射。
图7-25 为两光栅以很近的距离重叠的情况。
在a-a线上,两光栅的栅线透光部分与透光部分叠加,光线透过透光部分形成亮带;在b-b线上,两光栅透光部分分别另一光栅的不透光部分叠加,互相遮挡,光线透不过形成暗带,这种由光栅重叠形成的光学图案称为莫尔条纹。
长光栅莫尔条纹的周期为式中 W1——标尺光栅(也称主光栅)1的光栅常数;W2——指示光栅2的光栅常数;θ——两光栅栅线的夹角。
莫尔条纹有如下重要特性:1.运动对应关系莫尔条纹的移动量和移动方向与两光栅的相对位移量和位移方向有着严格的对应关系。
在图7-25中,当主光栅向右运动一个栅距W1时,莫尔条纹向下移动一个条纹间距B;如果主光栅1向左运动,莫尔条纹则向上移动。
光栅传感器在测量时,可以根据莫尔条纹的移动量和移动方向判定光栅的位移量和位移的方向。
2.位移放大作用由于两光栅的夹角θ很小,若它们的光栅常数相等,设为W,从式(7-19)可得到如下近似关系(7-20)明显看出,莫尔条纹有放大作用,其放大倍数为1/θ。
所以尽管栅距很小,难以观察到,但莫尔条纹却清晰可见。
这非常有利于布置接收莫尔条纹信号的光电器件。
3.误差平均效应莫尔条纹是由光栅的大量栅线(常为数百条)共同形成的,对光栅的刻划误差有平均作用,在很大程度上消除了栅线的局部缺陷和短周期误差的影响,个别栅线的栅距误差或断线及疵病对莫尔条纹的影响很微小,从而提高了光栅传感器的测量精度。
对于栅距很小(例如W<0.005mm)的光栅,特别是有的相位光栅处处透光,这时莫尔条纹的形成必须用光的衍射理论加以解释。
根据物理光学理论,平行光束透过光栅后,将发生衍射现象,如图7-26所示。
设光栅G1产生了0,±1,±2,…等n级衍射光,光栅G1的衍射光束到达光栅G2时将进一步被衍射,G1的n 级衍射光,其中每一级的衍射光束对光栅G2来说都是一组入射光束,并由光栅G2又衍射成n级衍射光(因为两光栅的W相同,又是单色光),所以从光栅副出射的衍射光束的数目为个。
莫尔条纹演示实验报告(3篇)

第1篇一、实验目的1. 理解莫尔条纹的原理;2. 观察并分析莫尔条纹的特点;3. 掌握莫尔条纹在光学测量中的应用。
二、实验原理莫尔条纹是两条或两条以上等间距的平行线或两个物体之间以恒定角度和频率发生干涉的视觉结果。
当人眼无法分辨这两条线或两个物体时,只能看到干涉的花纹,这种光学现象中的花纹就是莫尔条纹。
莫尔条纹的特点包括:条纹间距的固定性、颜色一致性、方向性等。
三、实验仪器与材料1. 实验仪器:莫尔条纹演示装置、光源、屏幕、尺子、游标卡尺;2. 实验材料:透明薄膜、刻度尺、白纸。
四、实验步骤1. 准备工作:将透明薄膜贴在刻度尺上,使刻度尺与透明薄膜平行;2. 光源照射:将光源照射到透明薄膜上,使光线透过透明薄膜;3. 观察现象:将白纸放在透明薄膜的另一侧,观察并记录莫尔条纹的形状、间距、颜色等特点;4. 测量条纹间距:使用尺子测量莫尔条纹的间距,并记录数据;5. 测量角度:使用游标卡尺测量透明薄膜与刻度尺之间的角度,并记录数据;6. 分析结果:根据实验数据,分析莫尔条纹的特点及其在光学测量中的应用。
五、实验结果与分析1. 实验结果:通过实验观察,发现莫尔条纹呈现出明暗相间的条纹,条纹间距固定,颜色一致,且具有一定的方向性。
2. 分析结果:(1)莫尔条纹的间距固定:根据实验数据,莫尔条纹的间距与透明薄膜的刻度间距一致,说明莫尔条纹的间距是固定的。
(2)莫尔条纹的颜色一致:实验中观察到的莫尔条纹颜色一致,说明在同一颜色范围内,莫尔条纹的颜色是一致的。
(3)莫尔条纹的方向性:通过改变透明薄膜与刻度尺之间的角度,发现莫尔条纹的方向也随之改变,说明莫尔条纹具有方向性。
六、结论1. 通过本实验,成功演示了莫尔条纹的形成过程,掌握了莫尔条纹的特点;2. 莫尔条纹在光学测量中具有广泛的应用,如位移测量、角度测量等;3. 本实验有助于加深对光学现象的理解,提高学生的实践能力。
七、实验拓展1. 尝试使用不同厚度的透明薄膜进行实验,观察莫尔条纹的变化;2. 探究莫尔条纹在光学干涉测量中的应用,如波长测量、相位测量等;3. 研究莫尔条纹在光学器件中的应用,如光栅、全息图等。
莫尔条纹的形成原理

莫尔条纹的形成原理
两块参数相近的透射光栅以小角度叠加, 产生放大的光栅。
莫尔条纹演示
条纹间距的计算
为了便于分析和 计算,将两个光 栅及其叠加结果 绘制成如右图所 示的局部放大示 意图。Leabharlann 由平行四边形ABCD的面积,有
由余弦定理得
利用以上关系可以计算出莫尔条纹的间隔
( 1)
莫尔条纹的应用
(1)检验光栅
用已知光栅常数的标准光栅检验被测光栅的 光栅常数。要求标准光栅的光栅常数与被测光栅 的光栅常数接近但不等,转动标准光栅和被测光 栅之间的角度,使莫尔条纹间距达到最大,此时 θ≈0,代入公式(1),则
( 2)
用这种方法还可以看出被测光栅的间隔是否均 匀,如果不均匀,则莫尔条纹会发生弯曲。
(2)测量微小位移
当两块光栅的光栅常数相等时,根据公式 (1),有
利用三角函数关系
,有
( 3)
当θ非常小时,可以将式(2)进一步简 化为
m≈d/θ
( 4)
以上两块光栅,一块作为定光栅固定不动,另 一块作为动光栅,固定在被测的运动物体上。 若被测物体沿光栅条纹排列方向移动光栅常数d 的距离,则莫尔条纹变化m,所以莫尔条纹将 位移放大了1/θ倍。 莫尔条纹的放大倍率仅取决于两个光栅之间的 角度,在测量中可以根据测量精度的需要任意 调整。
光栅传感器的特点
能把被测的模拟量直接转换成数字量。 与模拟传感器相比,数字式传感器抗 干扰能力强,稳定性强;易于微机接口, 便于信号处理和实现自动化测量。
莫尔条纹原理及应用

光学设计实验莫尔条纹原理及应用学生姓名:指导教师:所在学院:物理学院所学专业:物理学中国·长春2014 年6 月一、中文摘要目前,以莫尔条纹技术为基础的光栅线性位移传感器发展十分迅速,光栅长度测量系统的分辨率达到纳米级,测量精度已达 0.1um,已成为位移测量领域各工业化国家竞争的关键技术。
它的应用非常广泛,几乎渗透到社会科学中的各个领域,如机床行业、计量测试部门、航空航天航海、科研教育以及国防等各个行业部门。
本文首先详细阐述了莫尔条纹的形成机理,当计量光栅为粗光栅时,莫尔条纹形成机理用遮光阴影原理解释,当计量光栅为细光栅时,则用衍射干涉原理解释。
然后系统介绍了基于莫尔条纹技术的光电测量仪器的设计原理,它由光栅读数头和对莫尔条纹信号进行处理的电子学部分组成,光栅读数头包括光栅副,光电接收元件,由光源和准直镜组成的照明系统,以及必要的光阑、接收狭缝、调整机构等。
最后提出了基于光栅莫尔条纹干涉计量技术的一种新的应用,即把光栅线性位移传感器应用在数字读数显微镜上,数字读数显微镜包括光学系统、控制与显示系统、CCD 摄像机与显示器四部分,其中,控制与显示系统是设计的核心模块,是基于 FPGA 技术实现的,它包括倍频鉴相模块、可逆计数模块、显示控制和显示接口模块。
经过大量的理论研究和实践测试工作,我们已经把光栅莫尔条纹技术成功地应用在数字读数显微镜上,实现了对被测物体线性位移的精密测量,测量分辨率达到 0.5um,测量精度达到±1um。
设计中用 CCD 摄像头代替目镜可以避免传统的肉眼观察的不便。
关键词:莫尔条纹,光栅读数头,FPGA,数字读数显微镜二、英文摘要At the present time, grating linear movement sensor based on grating Moiré fringe interferometry technology has developed rapidly.Grating movement measurement system has reached the nanometer level resolution, measuring accuracy than 0.1um.It is widely used, almost penetrated into the social sciences in various fields, such as the machine tool industry,test measurement,aerospace navigation,national defense,education and scientific research in all industry sectors.This paper first described in detail the formation mechanism of Moire fringe,when the measurement grating for coarse grating, the moire fringe formation mechanism of the shadow of the principle of using sunscreen to explain, when the measurement grating for fine grating, then explained by diffraction interference principle. And then systematically introduced the principle of design of grating linear movement sensor based on Grating Moire fringe technology, grating linear movement sensor is composed of grating reading-head and Moire fringe signal processing electronics components.Grating reading-head include Grating pair, the lighting system composed of light source, collimation mirror, the essential diaphragm, received slot and adjusted organization, etc. Finally, a new kind of application based on the Moire fringe interferometry technology is proposed, which apply the grating linear movement sensor to the digital reading microscope. The digital reading microscope includes optical system, control and display system,CCD camera and display four parts, among them, it is the key module that is designed to control with the display system, which is based on FPGA technology and mainly concludes four fold-frequency and direction-judgment module,reversible counter module,displaying control module and displaying interface module.After a lot of theoretical research and practical testing,we have already applied grating Moire fringe technology to the digital reading microscope successfully,which has made the accurate measurement of linear displacement of the testee become true, and the measured resolution has reached 0.5um, the measurement accuracy has reached ± 1um. CCD camera instead of eyepiece can avoid the inconvenience of traditional visual observation.Keywords: Moire Fringe, Grating Reading Head, FPGA, Digital Reading Microscope三、正文1、问题提出光栅莫尔条纹技术是一门既古老又现代的测量技术。
莫尔条纹的形成原理及特点四

返
回
上一页
下一页
辨向电路
正向移动时脉冲数累加,反向移动时,便从累加的脉冲数中 减去反向移动所得到的脉冲数,这样光栅传感器就可辨向。
表5-1莫尔条纹和光栅移动方向与夹角转向之间的关系
标尺光栅相对指示光栅的转 角方向 标尺光栅移动 方向 向左 莫尔条纹移动方向 向上 向下 向下 向上
顺时针方向
向右 向左 逆时针方向 向右
2)光学放大作用 由公式B=W/θ可知,当W一定,而θ 较小时,可使θ<<1,则B>>W。
如:长光栅在一毫米内刻线为100条,θ= 10 =0.00029 rad,则:B=0.01/0.00029≈3.44mm, 放大344倍。
放大倍数可通过改变θ角连续变化,从而获得任 意粗细的莫尔条纹,即光栅具有连续变倍的作用。
3)均化误差作用
莫尔条纹是由光栅的大量刻线共同形成,
对光栅的刻线误差有平均作用。
四、莫尔条纹测量位移
光栅每移过一个栅距W,莫尔条纹就移过一 个间距B。通过测量莫尔条纹移过的数目,即可 得出光栅的位移量。
由于光栅的遮光作用,透过光 栅的光强随莫尔条纹的移动而变化, 变化规律接近于一直流信号和一交 流信号的叠加。固定在指示光栅一 侧的光电转换元件的输出,可以用 光栅位移量X的正弦函数表示,如 图5-5-3所示。只要测量波形变化 的周期数N(等于莫尔条纹移动数) 就可知道光栅的位移量X,其数学 图5-5-3 表达式为
图5-5-1光栅传感器的组成
三、莫尔条纹的形成原理及特点
1、莫尔条纹的形成原理
当两块光栅互相靠近且 沿刻线方向保持有一个夹角 θ时,两块光栅的暗条与亮 条重合的地方,使光线透不 过去,形成一条暗带 ;而亮 条与亮条重合的地方,部分 光线得以通过,形成一条亮 带 。这种亮带与暗带形成的 条纹称为莫尔条纹。
莫尔现象及其应用资料
x
1 2
1
cos2
2 x
重叠时,透过率为 1 1 d1 ,
2 1 d2
T
x
T1xT2
x
1 4
1
cos21x
cos2
2x
cos2 1 x cos2
2 x
1 4
1
cos21x
cos2
2x
1 2
cos2
1
2
x
1 2
cos2
1
2
x
1、均匀透过率;2、3 两项原光栅透过率
4、和频; 5差频。
差频项频率低,很容易分离出来,是莫尔现象被 广泛应用的重要原因之一
1 p1
1 p2
r
2N
2. 莫尔条纹的初步分析
选用旋转方向相反且条纹间距相等的螺旋光栅
p1 p2
2 r 2N 2n
p
n 0,1,2, ,2N 1
光准直时 光非准直时
1 1 0 p1 p2
n , N
p p2 p1 p2 p1
n 0,1,2, ,2N 1
7.4 莫尔轮廓术
F1
x,
y,
z
F2
x,
y,
z
q
如初级条纹为两族同心圆
x x
l 2 l 2
y2 y2
m1a2 m2a2
对应等和线及等差线方程分别为
x2 ap 2
y2 ap 2
l2
1
2 2
x2
ap
2
y2
ap
2
l2
1
2 2
等和线为一族同心椭圆,等差线为一族双曲线
两组同心圆叠合所形成的莫尔条纹恩
迈克尔逊实验中的条纹分析
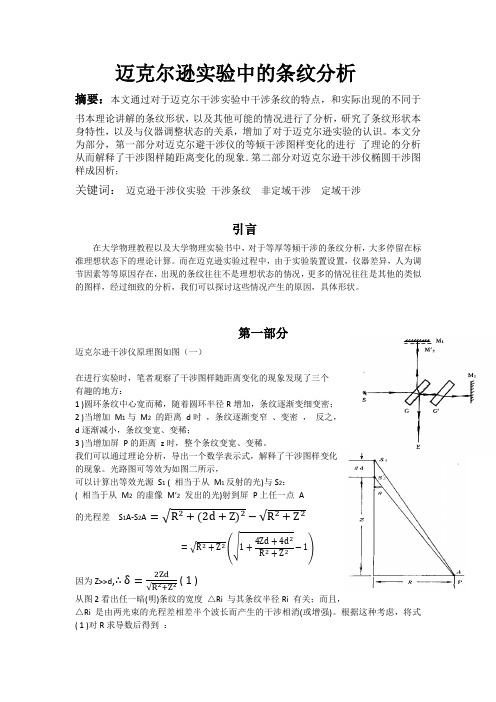
迈克尔逊实验中的条纹分析摘要:本文通过对于迈克尔干涉实验中干涉条纹的特点,和实际出现的不同于书本理论讲解的条纹形状,以及其他可能的情况进行了分析,研究了条纹形状本身特性,以及与仪器调整状态的关系,增加了对于迈克尔逊实验的认识。
本文分为部分,第一部分对迈克尔避干涉仪的等倾干涉图样变化的进行了理论的分析从而解释了干涉图样随距离变化的现象.第二部分对迈克尔逊干涉仪椭圆干涉图样成因析;关键词:迈克逊干涉仪实验干涉条纹非定域干涉定域干涉引言在大学物理教程以及大学物理实验书中,对于等厚等倾干涉的条纹分析,大多停留在标准理想状态下的理论计算。
而在迈克逊实验过程中,由于实验装置设置,仪器差异,人为调节因素等等原因存在,出现的条纹往往不是理想状态的情况,更多的情况往往是其他的类似的图样,经过细致的分析,我们可以探讨这些情况产生的原因,具体形状。
第一部分迈克尔逊干涉仪原理图如图(一)在进行实验时,笔者观察了干涉图样随距离变化的现象发现了三个有趣的地方:1 )圆环条纹中心宽而稀,随着圆环半径R增加,条纹逐渐变细变密;2 )当增加M1与M2的距离d时,条纹逐渐变窄、变密,反之,d逐渐减小,条纹变宽、变稀;3 )当增加屏P的距离z时,整个条纹变宽、变稀。
我们可以通过理论分析,导出一个数学表示式,解释了干涉图样变化的现象。
光路图可等效为如图二所示,可以计算出等效光源S1 ( 相当于从M1反射的光)与S2:( 相当于从M2的虚像M’2发出的光)射到屏P上任一点A的光程差S1A-S2A =√R2+(2d+Z)2−√R2+Z2=√R2+Z2(√1+4Zd+4d2R2+Z2−1)因为Z>>d,∴δ=√R2+Z2( 1 )从图2看出任一暗(明)条纹的宽度△Ri 与其条纹半径Ri 有关;而且,△Ri 是由两光束的光程差相差半个波长而产生的干涉相消(或增强)。
根据这种考虑,将式( 1 )对R求导数后得到:dδdR =2Zd[−R(R2+Z2)32]将dδdR改为△δ/△R,移项后得到:△R =(R 2+Z2)322ZRd△ δ ( 2)由于△R是M1移动半个波长距离而产生的暗(明)条纹宽度,以△δ=λ/2代入式( 2 ),同时考虑到Z>> R,则式( 2 )近似为:△R=λz24Rd(3)由式( 3 ),当Z,d不变时,△R反比于R.这就说明了圆环暗(明)条纹宽度△R与条纹半径R的逐渐增加而变窄.因此中心稀而宽,边缘密而窄。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图@ /01" @
相位的影响 234 4554’6 (5 937)4
!"@
直流分量 (背景光强) 的影响 同样不影响问题的一般性, 为方便讨论起见, 设
上面两结构图在加法和 ($ % (# % $ 和! % &。此时, 乘法叠加方式下的结果表达式如下: "( % )& ’( % )# ’( % )& !$ # !# # $ $, # $, # $, [! ( [! ( #’() $] ’() $] "$ # "#) "$ ) "#) (A) ・ ’( " *( $ , % )& ’( %) % )& !$ !# # $ $, # $, ($ + #) [# ( ・ ’() $ ]#($ + #) ! "$ # "#) [# ( (# ’() $ ]# !$ ’() ! "$ ) "#) ! "# $ )# (# ($&) !# ’() ! "$ $ ) 可见两种情况下莫尔图中都增加了相应直流
[P, :] 尔条纹各种因素的研究较少, 而且不全面 。本
涉法、 全息干涉法、 散斑干涉法、 光学探针显微镜、 共
[%] 焦显微镜、 结构光三角测量法、 莫尔测量法 和相位 [!] 测量法 等。这诸多方法各有优缺点。如干涉测量
法测量精度最高, 属非接触全场测量, 且测量速度 快, 但范围小; 结构光三角测量法及其后面的方法属 于光学投影法, 结构光三角测量法中的激光点扫描 和激光线扫描是逐点或逐线测量, 要求激光束和被 测物体间有相对位移, 此方法原理简单、 易于实现、 精度较高, 但速度较慢、 一次不能实现全场测量; 莫 尔测量法、 相位测量法是全场测量, 属中等精度轮廓 测量法, 它们具有全场、 高速度、 非接触等优点, 主要
:
(#) 加法叠加; ($) 减法叠加; ( %) 乘法叠加。相应的 莫尔图也分为三种: (#) 和型莫尔条纹图; ($) 差型莫 尔条纹图; (%) 积型莫尔条纹图。 实际中, 两干涉条纹光场非相干地在一漫反射 屏上叠加, 用胶片或摄像机线性地接收就能实现加 法叠加, 得到和型莫尔图。干涉条纹光场照明光栅 或用非相干光照明两个叠加在一起的光栅就能实现 乘法叠加。实现减法叠加较为困难, 用照相处理或 计算机图像处理才能实现, 由于差型莫尔的性质与 和型莫尔图的性质相差很小, 且在实际中应用不多, 这里也不作讨论。
收稿日期: !""" # "$ # !$ 万方数据
文从生成莫尔条纹的几种方式入手, 分结构间平行 和有一定夹角两种情况, 试图对影响莫尔条纹的各 因素作一较为全面的分析。
!
正弦结构生成莫尔信息的几种方式
通常莫尔条纹图可分为相干型莫尔条纹图和非
相干型莫尔条纹图。在激光莫尔度量技术中, 有一 些莫尔图是通过光学滤波获取的, 在这种情况下, 莫
上两式中, 结构 !# 初相位为零, 振幅和直流分量分 别为 ( # 和 &# 。结构 !$ 初相位为 ", 振幅和直流分 量分别为 ($ 和 &$ 。上述表达式中, 两结构图的条 纹线都平行于 $ 轴。 % * # 频率的影响 为方便讨论起见, 设 &# + &$ + ,, (# + ($ + # 和 上面两结构 " + , 是不影响问题的一般性的。此时, 图在加法和乘法叠加方式下的结果表达式如下: (#) 加法叠加 ) ’( # , $ )% "( $ )’ "( $ )% # #, $ #, [! ( [! ( $’() #] ’() # ] (%) !# ’ !$) !# * !$) ($) 乘法叠加 ・ "( ) +( # , $ )% "( $) $ )% # #, $ #, (# , $) [$ ( [$ ( ’() # ]’(# , $) ’() #] ! !# ’ !$) ! !# * !$) 万方数据 (-)
图$ 345* $
频率差较大时的影响
678 8998’: (9 9;8<=8>’? @78> :78 9;8<=8>’? 4) $, 01
第 ## 卷第 $ 期
王学礼等: 由正弦结构图产生的莫尔条纹各影响因素分析
+=
!"#
幅值的影响 在不影响一般性前提下, 为方便讨论, 同样假设
可以看 出, 初相位! 表示莫尔条纹线性平移 量。其中积型莫尔条纹移动 ! 而和型莫尔条纹移 动! ? #。但 在 $ 方 向 移 动 相 同 的 空 间 距 离 "$ & ( ] 。如图 @ 所示 (取"$ % *& -., + # ![ ! "$ ) "#) "# % , 图中和型莫尔的包络线和积型莫尔的中心 ** -.) 线均为正弦包络线, 相移量! % A&B。
%
引言
目前光电三维测量的主要方法有: 普通光学干
用于散射物体的宏观轮廓测量。 莫尔技术由于其特有的优点, 近年来得到国内 外学者的高度重视。它在光电三维面型测量技术中 占有举足轻重的地位。正确理解各种因素对莫尔条 纹 (特别是对莫尔正弦性) 的影响, 对莫尔技术的正 确应用有着重要的指导意义。国内外学者对影响莫
图! /01" ! 幅值的影响
234 4554’6 (5 789:06;<4
项。不同之处在于积型莫尔中还多了两项高频分量 (# (# , 可称为 “残留” 。 “残 !$ ’() ! "# $ )# !# ’() ! "$ $ ) 留” 的存在限制了莫尔的频率范围不得高于或接近 “残留” 频率, 否则难以分离。直流分量影响莫尔的 信噪比和动态范围。
""
半
导
体
光
电
$,,# 年 $ 月
尔条纹实质上已成为双光束相干叠加产生的干涉条 纹, 即条纹由两个波阵面相位差产生, 这里的双光束 都是光栅的衍射光束。这种通过空间滤波系统后获 得的莫尔条纹图称为相干型莫尔条纹图; 而在常用 的莫尔技术中, 更多的莫尔图为非相干莫尔条纹图。 如当非相干光照明两个叠加在一起的振幅型光栅 时, 两个干涉条纹光场非相干叠加在一起, 由照相机 或摄像机等拍摄所得到的莫尔条纹图, 这些莫尔条 纹是由两个周期性结构的强度叠加产生的。由于研 究工作者通常涉及到非相干莫尔条纹图, 因此相干 型莫尔条纹图在这里将不进行详细的讨论。 两幅结构图叠加的方式可分为下列三种
&D*01(/0: M+)0N /’*L,)F.’ 23GO4 G, )(2+0/G,/ 2G0/ ), +2/+ # ’3’*/0+,)* PQ (’G4.0’(’,/ 7 E/ )4 +R J0’G/ )(2+0/G,*’ /+ *+(20’L’,- /L’ ’RR’*/ +R SG0)+.4 RG*/+04 +, M+)0N ),R+0(G/)+, 7 =L’ G0/)*3’ G,G3O4’4 4+(’ )(2+0C /G,/ RG*/+04 4.*L G4 R0’F.’,*O,2LG4’,6G*TJ0+.,- 3)JL/,G(23)/.-’ G,- /L’ G,J3’ 6’/U’’, /L’ /U+ 4/0.*/.0’4 7 &+(’ .4’R.3 *+,*3.4)+, G0’ +6/G),’- 6G4’- +, G6+S’ G,G3O4)4 7 E.) B"1F*: PQ (’G4.0’(’,/;M+)0N /’*L,)F.’;4),’ 4/0.*/.0’
图# 345* #
频率差较小时的影响
678 8998’: (9 9;8<=8>’? @78> :78 9;8<=8>’? A4998;8>’8 4) ! 01
% 两频率不同而结构线间夹角为零的 情况
设两平行正弦结构 !# , !$ 的空间频率分别为 , , 。两结构图可由下面两方程表达: & !# !$ !$ !# ($ "( $ )% &# ’ (# ’() ! !# # ) # #, ($ "( $ )% &$ ’ ($ ’() ! !$ # ’ ") $ #, (#) ($)
(% 7 西安交通大学 激光与红外研究所, 陕西 西安 ;%"":<;! 7 西北工业大学, 陕西 西安 ;%"";!)
摘
要: 莫尔技术以其特有的优点在光电三维面型测量中占有举足轻重的地位。正确理解
各种影响因素对莫尔条纹的影响, 对莫尔技术的正确应用有着重要的指导意义。分析了由正弦结 构形成莫尔信息的几种方式, 详细地研究了影响此种莫尔信息的几种因素— — —频率、 相位、 幅值、 背 景光强、 结构间夹角等。得出了一些有意义的结论, 给出了正确应用莫尔信息的一般原则。 关键词: 三维测量;莫尔技术;正弦结构 中图分类号: =>!:; 文献标识码: ?
!$ % !# % & 和! % &,则和型莫尔与积型莫尔的表达 式如下: " #( $ , % )& ’( % )# ’( % )& $ $, # $, [ ( [ ( # ($ ’() $] ’() $ ]# ! "$ # "#) ! "$ ) "#) ( (# ) ($) (# (*) ’() ! "# $ ) ・ ’( ・ " *( $ , % )& ’( %) % )&( ($ (# + #) $ $, # $, [# ( ・ ’() $ ]#( ($ (# + #) ! "$ # "#) [# ( (+) ’() $] ! "$ ) "#) 由式 (+) 可见, 积型莫尔分析同前。而由式 (*) 可知, 当 ( $ ! ( # 时, 和型莫尔产生了新的组成 ( (# , ($ ) (# , 它破坏了包络函数的正弦性。如图 ! ’() ! "# $ ) 所示 (取 ($ % $, , 图 ( # % $ " *, "$ % *& -., "# % ** -.) 中和型莫尔的包络线和积型莫尔的中心线均为正弦 包络线。由图中可以明显看出, 包络线的正弦性很 差。这就要求: ( $) 在和型莫尔图中, 即便原光场为 正弦分布, 但两者光强不等时会产生非正弦莫尔分 布。这种非正弦性会给求解带来误差; (#) 同时也说 明和型莫尔必须进行光强匹配, 即调整光强使两者 匹配。