基于CAN总线的汽车组合仪表
汽车组合仪表的设计与实现

汽车组合仪表的设计与实现汽车组合仪表是汽车驾驶舱内的重要部件,它能够为驾驶员提供车辆行驶、发动机运转、安全系统等各种信息。
本文旨在探讨汽车组合仪表的设计思路、实现方法以及效果评估,并展望未来的发展方向。
在设计汽车组合仪表时,需要考虑到以下几个方面:整体结构:汽车组合仪表一般由转速表、车速表、燃油表、水温表、气压表、里程表等多个仪表组成。
这些仪表需要以方便驾驶员读取的方式布局和设计。
显示方式:汽车组合仪表通常采用LED、LCD、VFD等显示技术,以提供高清晰度、高亮度的数字或图形显示。
一些高端车型还采用了全液晶仪表,以提供更加个性化的显示风格和更多的信息。
数据来源:汽车组合仪表的数据来源于各种传感器和控制系统。
例如,车速表和转速表的数据来自车速传感器和曲轴传感器;燃油表的数据来自油量传感器;水温表的数据来自水温传感器等。
汽车组合仪表的实现方法包括硬件和软件两个方面。
硬件实现:汽车组合仪表的硬件通常包括传感器、控制器、显示屏等。
传感器负责采集各种数据,如车速、转速、油量、水温等;控制器则负责处理这些数据,并输出相应的控制信号,以驱动显示屏显示相应的信息;显示屏则负责将信息呈现给驾驶员。
软件实现:汽车组合仪表的软件部分主要包括数据采集、数据处理、数据显示等模块。
数据采集模块负责从传感器中读取数据;数据处理模块则对采集到的数据进行处理和分析,以便于显示;数据显示模块则负责将处理后的数据在显示屏上显示出来。
对于汽车组合仪表的实际效果评估,主要从以下几个方面进行考虑:显示清晰度:评估汽车组合仪表显示屏的清晰度是否足够高,以便于驾驶员在各种光线条件下都能够清晰地读取信息。
数据准确性:评估汽车组合仪表传感器采集数据的准确性和可靠性,以及控制器处理数据的准确性和实时性。
响应速度:评估汽车组合仪表的响应速度是否足够快,以便于驾驶员在车辆行驶过程中能够及时地获取相关信息。
可读性:评估汽车组合仪表的信息显示是否直观易懂,以便于驾驶员能够快速地理解和掌握车辆的行驶状态信息。
论文排版

中文摘要设计了一款基于CAN总线的汽车仪表控制系统。
该汽车仪表控制系统主要由专用电源芯片、单片机STC89C52、CAN独立控制器SJA1000、CAN收发器PCA82C250、光耦芯片6N137、MAX232电平转换芯片等元器件组成。
专用电源芯片用于为整个系统提供稳定电源,汽车各个目标电气节点可以通过CAN总线将参数传输给单片机STC89C52 ,单片机STC89C52主要负责分析处理数据,并通过液晶显示相关信息。
系统还可通过RS232把单片机系统的相关数据上传给PC机来进一步对数据的分析或对数据的存储。
系统使用CAN总线实现显示信息的传送,共享车上其它模块处理的信息,使车内布线简单、传输及显示信息可靠、仪表体积小、系统扩展能力强、实时性好、精确度高、显示信息全面直观。
英文摘要Abstract:This study was undertaken to design an instrumentation control system based on CANbus.Thecontrol system mainly consists of special power supply module, single-chipcomputer STC89C52,CANindependent controller SJA1000, CAN transceiver PCA82C250, Light-coupler 6N137,and MAX232 level transition chip and soon. Special power supply chip is used for supplying stable power for the whole system, CAN bus is responsible for transmitting data needed by display system tothe Microprocessor STC89C52, STC89C52 is mainly responsible for the analysis of data processing, and through the LCD related information. The whole systemcan upload relevant data ofthe single-chip computer system to the PC which cananalyze the data or the data storagefurtherthrough RS232. The system has realized the share of information of the electric vehicle by the CAN bus, which make the layout of the electric vehicle’s wire become simple, decrease the dependence of instrument to wires, and increase the stability of the electric vehicle.目录中文摘要 (I)英文摘要 ...................................................................................................... I I 目录 ............................................................................................................. I II 图目录 . (V)第1章绪论 (1)1.1课题研究背景及意义 (1)1.2本课题在国内外的研究概况 (1)1.3本课题研究内容 (1)第2章总体方案设计 (2)2.1系统的功能与要求 (2)2.2系统组成及介绍 (2)2.2.1单片机模块 (2)2.2.2串口通信模块 (3)2.2.3 CAN通信模块 (3)第3章车用仪表控制系统的硬件设计 (3)3.1单片机最小系统 (3)3.1.1单片机的时钟电路硬件设计 (3)3.1.2单片机的复位电路硬件设计 (4)3.1.3 MAX232介绍 (4)3.1.4串行通信接口电路 (5)3.2温度传感器及其硬件接口电路设计 (6)3.2.1温度传感器DS18B20简介 (6)3.2.2 DS18B20与单片机的硬件接口设计 (6)第4章车用数字仪表系统的软件设计 (7)4.1开发语言简介 (7)4.2软件总体设计 (7)4.3部分模块程序设计介绍 (7)4.3.1温度传感器DS18B20模块程序设计 (7)4.3.2 CAN节点软件设计 (8)参考文献 (8)附录 (9)图目录图1图2 (4)图 3 (5)图 4 (6)图5图 6 (8)0第1章绪论第1章绪论1.1课题研究背景及意义本课题通过仪表与微处理器,基于CAN总线网络的数字电子器件代替原有的机械机芯表、电气式仪表和模拟电路电子仪表,把各参数的测量数字化,有利于和汽车其它的电子集中控制系统进行数据交换,有利于汽车集中控制系统的发展和实现,此外还使得汽车仪表的功耗、安全性、可靠性、舒适性得到更好的提高。
基于 S9S12HA32的汽车组合仪表设计
基于 S9S12HA32的汽车组合仪表设计刘伟;简林莎;徐海洋;冯谣;郎明华【摘要】针对汽车上电控技术越来越复杂、通信量大等状况,基于 S9S12HA32主控芯片设计一款组合仪表系统,利用 CAN 总线特性进行数据传送,通过步进电机对指针进行精确控制,结合主控芯片的结构特点及功用设计了组合仪表的硬件电路连接,设计了控制软件的具体实施方案。
试验结果表明,基于 S9S12HA32单片机设计的组合仪表稳定性好、精度高、反应快速,满足了用户对组合仪表功能的要求。
【期刊名称】《北京汽车》【年(卷),期】2013(000)003【总页数】3页(P40-42)【关键词】汽车仪表;CAN 总线;S9S12HA32;步进电机【作者】刘伟;简林莎;徐海洋;冯谣;郎明华【作者单位】长安大学汽车学院,陕西西安 710064;长安大学汽车学院,陕西西安 710064;长安大学汽车学院,陕西西安 710064;长安大学汽车学院,陕西西安 710064;潍柴动力股份有限公司,山东潍坊 261069【正文语种】中文【中图分类】U463.7.020 引言近年来,随着汽车工业的快速发展和电子控制技术的不断完善,各种功能的电子器件越来越复杂。
汽车组合仪表成为车辆主要信息的显示单元,驾驶员运用此平台了解汽车的各种状况,能够直观、实时、动态地掌握车辆本身的各项数据。
因此,面对汽车朝节能、低碳、安全和舒适等方面发展,高集成化、高稳定性的步进电机式组合仪表成为科研人员不断努力的研究方向,满足更多复杂信息量处理功能的数字组合式仪表是当今最热的研究内容之一。
CAN总线是控制器局域网络(Controller Area Network, CAN)的简称,由于其串行式总线结构及硬件电路连接简单且便于线束空间布置[1],数据传送具有突出的实时性、可靠性和灵活性,利用CAN总线的特性对各种控制系统在车载控制领域中得到应用。
文中所设计的汽车组合仪表是一种基于飞思卡尔公司生产的S9S12HA32型的主控芯片,以 CAN总线为通讯协议,主要功能实时动态地显示如车速、里程、转速、水温和燃油数据值,以及常用的指示信号和故障警示信号灯。
基于CAN总线的汽车仪表设计-任务书
[3]吴浩珪.汽车电子控制技术和车内局域网[M].北京:电子工业出版社, 2003.
[4]江思敏. PCB和电磁兼容设计[M].北京:机械工业出版社,2006.
[17] SAE J1939 Recommended practice for a serial control andcommunication vehicle network [S]. Society of AutomotiveEngineers,2000.
六、备注
指导教师签字:
年 月 日
教研室主任签字:
年 月 日
设计的实物模型,设计说明书,程序。
四、设计(论文)进度安排
(1)熟悉任务书,了解相关信息,准备资料,填写开题报告:第1~2周(3月1日~3月13日)
(2)掌握CAN总线与汽车仪表的绘制,并提出相应问题:第3~7周(3月14日~4月18日)
(3)对系统的软、硬件进行设计,并利用C语言进行软件编程:第8~11周(4月19日~5月16日)
(二)选题的目的、意义
目的:在CAN总线技术的基础上,研究和设计了一款CAN总线汽车仪表。该仪表通过编程实现数据接收、处理以及显示。该设计利用CAN总线将仪表纳入整个车身网络,通过对CAN总线数据读取、处理和显示,实时反映车辆工况。
意义:将CAN总线技术应用于汽车数字式组合仪表的开发,使仪表所需的发动机转速、车速、水温等主要信号均通过其它车载电控系统的CAN协议接口直接读取,避免现有汽车数字式仪表每个信号均采用传感器到仪表点对点的信号获取与传输方式带来汽车线束多、质量大、故障率高的不足,减少了传感器和汽车线束的数量,降低了仪表成本,提高了系统工作可靠性。
汽车仪表视觉显示设计分析研究

汽车仪表视觉显示设计分析研究随着科技的不断发展,汽车仪表视觉显示设计也在不断演变进步。
汽车仪表作为车辆信息的重要来源,不仅需要满足基本的驾驶需求,还需满足驾驶员的舒适度和安全性需求。
本文将对汽车仪表视觉显示设计进行分析研究,探讨其发展历程、现状和存在的问题,以及未来发展趋势。
早期的汽车仪表多为机械式,以指针式仪表为主。
这些仪表的精度和可靠性都比较差,而且读数也不够直观。
随着电子技术的发展,汽车仪表开始向电子化显示设备演化。
电子仪表的出现,不仅提高了仪表的精度和可靠性,还增加了多种功能,如车速里程、油耗、故障诊断等。
随着信息化时代的到来,汽车仪表视觉显示设计也在不断升级。
汽车HUD(Head-Up Display)技术的出现,将车辆信息投影到驾驶员视线前方,使驾驶员无需低头就能获取所需信息。
近年来,随着智能化的快速发展,汽车仪表视觉显示设计又出现了多种新型态,如全液晶仪表、大尺寸触摸屏等。
目前,汽车仪表视觉显示设计的实际应用中,仍存在以下问题:显示清晰度:虽然液晶仪表已经广泛应用,但是部分产品的显示清晰度仍需提高。
特别是在强烈阳光下,驾驶员可能无法看清仪表显示信息。
视觉效果:部分汽车仪表的界面设计不够直观,驾驶员需要花费较长时间才能理解界面信息。
过多复杂的信息显示也容易让驾驶员感到混乱。
用户体验:不同的驾驶员有不同的使用习惯和需求。
现有的汽车仪表视觉显示设计往往没有充分考虑到用户体验的差异,不能很好地满足不同驾驶员的需求。
针对上述问题,汽车仪表视觉显示设计的研究方法应包括以下几个方面:市场调研:了解当前市场上各种汽车仪表视觉显示设计的优缺点,找出消费者最的需求点。
用户需求分析:通过问卷调查、深度访谈等方式,了解不同类型驾驶员对汽车仪表视觉显示设计的喜好和需求,找出设计中的痛点。
设计实验:根据市场调研和用户需求分析的结果,进行汽车仪表视觉显示设计的实验性研究,不断优化设计方案。
随着科技的不断发展,汽车仪表视觉显示设计的未来发展趋势可以预见。
基于CAN总线技术的汽车组合仪表系统的研究

基于CAN总线技术的汽车组合仪表系统的研究摘要:本论文采用can总线技术,遵循sae j1939网络通信协议,以飞思卡尔公司的16位微控制器(mcu)mc9s12xhz512为中央处理器,设计了can通信接口、lcd显示屏、步进电机驱动等模块,通过 code warrior ide开发工具软件编程并进行了仿真实验.仿真结果表明,该仪表系统能够实时反映车辆的工况。
关键词:can总线 mc9s12xhz512 汽车组合仪表中图分类号:tp273 文献标识码:a 文章编号:1007-9416(2013)01-0100-02汽车仪表是驾驶员与汽车进行信息交流的重要装置,对驾驶员正确判断汽车的运行状态及安全行车起着的作用。
随着现代汽车越来越多地采用电子装置控制,如发动机的定时、注油控制,加速、刹车控制(asc)及复杂的抗锁定刹车系统(abs)等。
这些控制需检测及交换大量数据,以往硬接信号线的方式不仅烦琐、昂贵,而且难以解决问题,采用带can 总线接口的汽车组合仪表系统采集并处理传感器的车速、油量、油压等信号,遵循sae j1939协议读取发动机转速、水温等信息,使问题得到很好地解决.该型仪表系统具有指示精度高、反应灵敏、结构简单、可靠性高等优点,是未来汽车仪表的发展方向。
1 汽车can总线和sae j1939协议1.1 can总线简介can(controller area network)总线全称“控制器局域网”,是iso国际标准化的串行通信协议,是德国bosch公司在80年代为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议。
它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维.通信速率可达1mbps.1993年can成为国际标准iso11898(高速应用)和iso11519(低速应用)。
can的规范从can 1.2规范(标准格式)发展为兼容can 1.2规范的can2.0规范(can2.0a为标准格式,can2.0b为扩展格式),目前应用的can 器件大多符合can2.0规范.can总线通信接口中集成了can协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。
基于单片机技术与CAN总线结合的汽车仪表设计
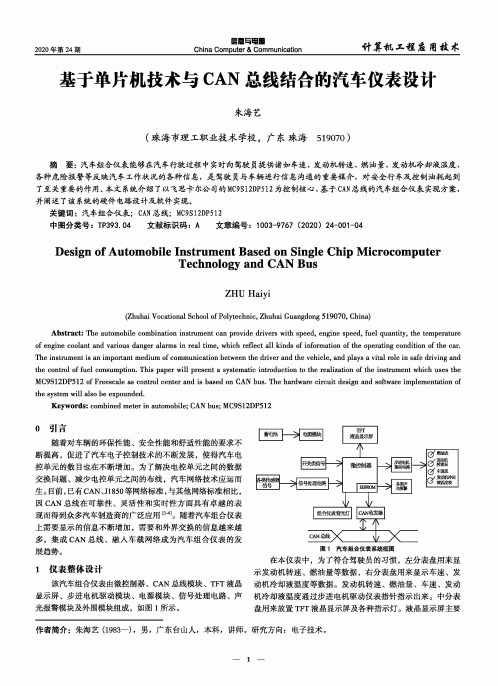
2020年第24期信s与电nChina Computer & Communication针其机工程雇用技术基于单片机技术与CAN总线结合的汽车仪表设计朱海艺(珠海市理工职业技术学校,广东珠海519070)摘要:汽车组合仪表能够在汽车行驶过程中实时向驾驶员提供诸如车速、发动机转速、燃油量、发动机冷却液温度、各种危险报警等反映汽车工作状况的各种信息,是驾驶员与车辆进行信息沟通的重要媒介,对安全行车及控制油耗起到 了至关重要的作用。
本文系统介绍了以飞思卡尔公司的M C9S12DP512为控制核心、基于CAN总线的汽车组合仪表实现方案,并阐述了该系统的硬件电路设计及软件实现。
关键词:汽车组合仪表;CAN总线;M C9S12DP512中图分类号:TP393. 04 文献标识码:A文章编号:1003-9767 (2020) 24-001-04Design of Automobile Instrument Based on Single Chip MicrocomputerTechnology and CAN BusZHU Haiyi(Zhuhai Vocational School of Polytechnic, Zhuhai Guangdong 519070, China)Abstract:The automobile combination instrument can provide drivers with speed, engine speed, fuel quantity, the temperature of engine coolant and various danger alarms in real time, which reflect all kinds of information of the operating condition of the car. The instrument is an important medium of communication between the driver and the vehicle, and plays a vital role in safe driving and the control of fuel consumption. This paper will present a systematic introduction to the realization of the instrument which uses the MG9S12DP512 of Freescale as control center and is based on CAN bus. The hardware circuit design and software implementation of the system will also be expounded.Keywords:combined meter in automobile; CAN bus; MC9S12DP512〇引言随着对车辆的环保性能、安全性能和舒适性能的要求不 断提高,促进了汽车电子控制技术的不断发展,使得汽车电 控单元的数目也在不断增加。
CAN总线在汽车车身控制中的应用

CAN总线在汽车车身控制中的应用引言20世纪80年代以来,随着集成电路和单片机在汽车上的广泛应用,汽车上的电子控制单元越来越多,例如电子燃油喷射装置、防抱死制动装置(ABS)、安全气囊装置、电控门窗装置和主动悬架等等。
在这种情况下,如果仍采用常规的布线方式,即电线一端与开关相接,另一端与用电设备相通,将导致车上电线数目的急剧增加,使得电线的质量占整车质量的4%左右。
另外,电控系统的增加虽然提高了轿车的动力性、经济性和舒适性,但随之增加的复杂电路也降低了汽车的可靠性,增加了维修的难度。
为此,改革汽车电气技术的呼声日益高涨。
因此,一种新的概念——车用控制器局域网络CAN 应运而生。
CAN是控制器局域网络(Controller Area Network)的简称,它是由德国Bosch公司及几个半导体生产商开发出来的,CAN总线是一种串行多主站控制器局域网总线。
它具有很高的网络安全性、通讯可靠性和实时性,而且简单实用,网络成本低。
特别适用于汽车计算机控制系统和环境温度恶劣、电磁辐射强和振动大的工业环境。
CAN总线的技术特点CAN总线可有效支持分布式控制或实时控制。
该总线的通信介质可以是双绞线、同轴电缆或光纤,其主要特点如下:◆CAN总线为多主站总线,各节点可在任意时刻向网络上的其他节点发送信息,且不分主从:◆CAN总线采用独特的非破坏性总线仲裁技术,高优先级节点优先传送数据,故实时性好;◆CAN总线具有点对点、一点对多点及全局广播传送数据的功能;◆CAN总线采用短帧结构,每帧有效字节数最多为8个,数据传输时间短,并有CRC及其它校验措施,数据出错率极低;◆CAN总线上某一节点出现严重错误时,可自动脱离总线,而总线上的其他操作不受影响;◆CAN总线系统扩充时,可直接将新节点挂在总线上,因而走线少,系统扩充容易,改型灵活;◆CAN总线的最大传输速率可达1Mb/s,直接通信距离最远可达到10km(速率在5kbps以下);◆CAN总线上的节点数取决于总线驱动电路。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CAN总线及其特点简介
CAN网络即控制器局域网(Controller Area Network),是德国BOSCH公司为解决现代汽车众多的控制单元、测试仪器之间的实时数据交换而开发的一种串行数据通讯协议,是一种支持分布式、实时控制的串行通讯中线网络。
其最大传输速率可以达到
1Mbps(40m),与一般通讯总线相比,CAN总线的数据通讯具有突出的可靠性、实时性和灵活性,是目前使用最广泛的一种汽车网络。
MC9S12H256芯片介绍
属于MOTOROLA旗下HC9S12系列16位控制芯片的一种,基本结构包括:HCS12中央处理器(CPU);两个独立的MSCAN控制器-兼容CAN2.0A/B协议;8通道16位可软件编程控制的定时器;24通道电机控制模块,串行通信接口(SCI)以及32 x 4的LCD控制驱动模块等。
这些丰富的资源足以满足作为汽车仪表的ECU对各种数据的处理,CAN报文的接收和发送,以及仪表的驱动等。
其内部结构的框架图如图1所示。
图1 MC9S12H256结构图
仪表系统设计
本设计中采用了CAN总线来实现仪表和汽车上其他电子系统信息交流。
仪表所需的所有信息均由CAN总线传递,降低了设计的复杂性和布线难度。
同时,仪表和整个车身CAN网络连接,形成了一个完整的汽车一体化网络控制系统。
硬件设计
本设计的硬件部分主要包括CAN模块,仪表指针模块,LCD显示模块以及指示灯模块,硬件电路的原理框架如图2所示。
图2 组合仪表硬件部分电路图
CAN通信模块硬件设计
CAN通信模块由MC9S12H256微控制器内置的MSCAN控制器和独立的CAN收发器PCA82C50构成,PCA82C50是Philips公司生产的高速CAN收发器,能适应不同的CAN总线传输速率。
CAN通信模块的硬件结构如图3所示。
图3 CAN模块结构图
仪表指针模块硬件设计
与一般的仪表采用专用驱动芯片来驱动步进电机不同,本设计中对步进电机的驱动采用的是由MC9S12H256的电机控制模块直接驱动步进电机完成,将原本由专用驱动完成的功能用软件来实现。
设计中采用的是VID29-05P两相式步进马达,其工作电压为5-10V,最大消耗电流为20mA,内置1/180减速比的齿轮系,输出轴的步距角最小为1/12度,其一个整步的步距角为180度,每个整步分为3个分步,其微步的工作方式为将每一分步再细分成4步走完,即将电机每相绕组的电流分为四个台阶投入或切断。
每个微步的步距角为15度,绕组的电流波形为正弦阶梯波。
电机控制模块采用双全桥模式(Dual Full H-bridge Mode)每四个通道一组组成一个控制端输出动态的PWM系列驱动一个步进电机运行,通过控制PWM信号的占空比的变化来控制电流有效值的变化,实现电机的微步驱动。
其他模块硬件设计
LCD显示模块由MC9S12H256的LCD控制驱动模块直接驱动10位7段制LCD显示屏以数字形式显示。
指示灯模块由微控制器的I/O引脚输出控制信号控制不同的发光二极管。
软件设计
软件部分的主要功能是初始化各功能模块,控制接收CAN报文,计算相关的参数,驱动仪表指针、LCD、指示灯的显示等。
软件整体流程图如图4所示:
图4 软件流程图。