步进电机的结构
步进电机结构及工作原理

步进电机结构及工作原理步进电机是一种特殊的电动机,它可以通过电脉冲控制精确地旋转一定角度,并且不需要传统的反馈系统。
步进电机主要由定子、转子和控制电路组成。
1. 定子步进电机的定子通常由两个或多个绕组组成,每个绕组都被连接到一个相位驱动器上。
这些绕组被排列在定子上,并且相互之间呈90度的偏移角度。
当驱动器向一个绕组发送脉冲时,该绕组会产生一个磁场,吸引转子中的磁铁。
2. 转子步进电机的转子通常由磁铁或永磁体构成。
当定子中的绕组被激活时,它们会产生一个磁场,吸引或排斥转子中的磁铁。
这种作用力使得转子沿着旋转方向移动一定角度。
3. 控制电路步进电机的控制电路通常由微处理器、计数器和驱动器构成。
微处理器负责计算出需要发送给驱动器的脉冲序列,并将其发送到计数器中进行计数。
当计数器达到预设值时,它会向驱动器发送一个脉冲,激活定子中的绕组。
工作原理:步进电机的工作原理基于磁场的相互作用。
当定子中的绕组被激活时,它们会产生一个磁场,吸引或排斥转子中的磁铁。
这种作用力使得转子沿着旋转方向移动一定角度。
每次激活定子中的一个绕组都会使得转子旋转一定角度,这个角度通常称为步进角。
步进电机可以通过改变脉冲序列和频率来控制旋转速度和方向。
当需要逆时针旋转时,只需要改变脉冲序列的顺序即可。
此外,步进电机还可以通过微处理器控制来实现精确的位置控制和速度调节。
总结:步进电机是一种特殊的电动机,它可以通过电脉冲控制精确地旋转一定角度,并且不需要传统的反馈系统。
步进电机主要由定子、转子和控制电路组成。
当驱动器向一个绕组发送脉冲时,该绕组会产生一个磁场,吸引或排斥转子中的磁铁。
这种作用力使得转子沿着旋转方向移动一定角度。
步进电机可以通过改变脉冲序列和频率来控制旋转速度和方向,并且可以通过微处理器控制来实现精确的位置控制和速度调节。
步进电机结构及原理

步进电机结构及原理
步进电机是一种将电脉冲信号转变为角位移或线位移的开环控制元件。
它利用电磁学原理,将电能转换为机械能。
其结构通常包括前后端盖、轴承、中心轴、转子铁芯、定子铁芯、定子组件、波纹垫圈和螺钉等部分。
步进电机的工作原理基于电磁感应定律。
当施加在电机线圈上的电脉冲信号产生磁场时,磁场与定子铁芯相互作用产生转矩,驱动转子旋转。
通过控制施加在电机线圈上的电脉冲顺序、频率和数量,可以实现对步进电机的转向、速度和旋转角度的控制。
每接收一个脉冲信号,步进电机就按设定的方向转动一个固定的角度,称为“步距角”,其旋转是以固定的角度一步一步运行的。
步进电机具有一些显著的特点。
首先,它们是开环控制系统的一部分,这意味着它们不依赖于位置反馈来调节运动。
其次,步进电机具有高精度的定位能力,这使得它们在需要精确控制位置的应用中非常有用。
此外,步进电机可以在不同的负载条件下保持恒定的速度,因为电机的转速只取决于脉冲信号的频率,而不受负载变化的影响。
总的来说,步进电机是一种功能强大且适应性强的电机类型,广泛应用于各种需要精确控制位置和速度的场合。
如需了解更多信息,建议咨询电机方面的专家或查阅相关专业书籍。
步进电机和直流无刷电机内部结构
步进电机和直流无刷电机内部结构
步进电机和直流无刷电机是常见的两种电机类型,它们在内部结构上有一些区别。
1. 步进电机的内部结构:
步进电机由定子、转子、磁路和绕组等组成。
定子通常是由磁铁或电磁铁制成,用于产生磁场。
转子通常是由带有磁性材料的齿轮或磁铁制成,围绕着定子旋转。
步进电机中的绕组被连到外部的电源,从而使电机产生磁场并实现旋转。
步进电机的转子以步进的方式运动,每次接收一个控制信号就会迈进一个固定的角度。
2. 直流无刷电机的内部结构:
直流无刷电机由永磁体、定子、转子和电子元件等组成。
永磁体通常由强磁性材料制成,用于产生磁场。
定子是包含绕组的部分,它的绕组被连接到外部电源,使电机产生磁场。
转子通常由带有磁性材料的永磁体制成,并通过与定子磁场的相互作用来旋转。
直流无刷电机的电子元件负责控制定子绕组的电流,以实现转子的旋转控制。
总的来说,步进电机是一种根据控制信号进行精确步进运动的电机,而直流无刷电机则通过电子元件控制定子电流,实现平滑的旋转运动。
这两种电机在不同的应用场景中有着各自的优势和特点。
步进电机结构、原理与设计计算及选型方法
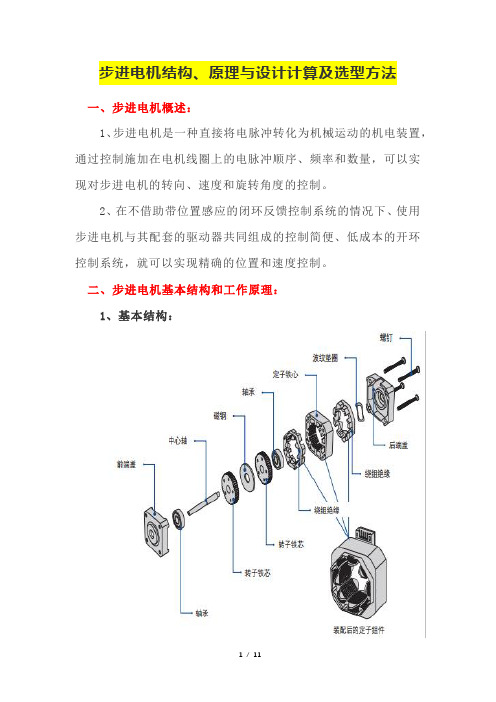
步进电机结构、原理与设计计算及选型方法一、步进电机概述:1、步进电机是一种直接将电脉冲转化为机械运动的机电装置,通过控制施加在电机线圈上的电脉冲顺序、频率和数量,可以实现对步进电机的转向、速度和旋转角度的控制。
2、在不借助带位置感应的闭环反馈控制系统的情况下、使用步进电机与其配套的驱动器共同组成的控制简便、低成本的开环控制系统,就可以实现精确的位置和速度控制。
二、步进电机基本结构和工作原理:1、基本结构:2、工作原理:⑴、步进电机驱动器根据外来的控制脉冲和方向信号,通过其内部的逻辑电路,控制步进电机的绕组以一定的时序正向或反向通电,使得电机正向/反向旋转,或者锁定。
⑵、以1.8度两相步进电机为例:当两相绕组都通电励磁时,电机输出轴将静止并锁定位置。
在额定电流下使电机保持锁定的最大力矩为保持力矩。
如果其中一相绕组的电流发生了变向,则电机将顺着一个既定方向旋转一步(1.8度)。
⑶、如果是另外一项绕组的电流发生了变向,则电机将顺着与前者相反的方向旋转一步(1.8度)。
当通过线圈绕组的电流按顺序依次变向励磁时,则电机会顺着既定的方向实现连续旋转步进,运行精度非常高。
对于1.8度两相步进电机旋转一周需200步。
⑷、两相步进电机有两种绕组形式:双极性和单极性。
双极性电机每相上只有一个绕组线圈,电机连续旋转时电流要在同一线圈内依次变向励磁,驱动电路设计上需要八个电子开关进行顺序切换。
⑸、单极性电机每相上有两个极性相反的绕组线圈,电机连续旋转时只要交替对同一相上的两个绕组线圈进行通电励磁。
驱动电路设计上只需要四个电子开关。
在双极性驱动模式下,因为每相的绕组线圈为100%励磁,所以双极性驱动模式下电机的输出力矩比单极性驱动模式下提高了约40%。
三、负载:1、力矩负载(Tf):Tf=G*r;G表示:负载重量;R表示:半径。
2、惯量负载(TJ):T=J*dw/dtJ=M*(R12+R22)/2(Kg*cm);表示M:负载质量,R1表示:外圈半径,R2表示:内圈半径,dω/dt表示:角加速度。
步进电机结构及工作原理

步进电机结构及工作原理步进电机是一种将电能转化为机械能的电机,其工作原理是通过交替激励电流使电机转动一定角度。
步进电机的结构主要包括转子、定子、驱动电路和传感器。
转子是步进电机的旋转部件,通常采用多个磁极组成。
常见的转子形式包括两相、三相、四相等。
每个磁极上通有一个电线圈,通过控制电流的通断来实现对电机的控制。
定子是一个定位部件,通常由磁铁或磁性材料制成。
定子的作用是提供一个磁场,使转子能够在不同的位置停留。
定子的磁场较为稳定,当转子旋转时,定子的磁场不随其变化。
驱动电路是步进电机的控制部分,负责向电机提供合适的电流信号,控制电机旋转的角度和速度。
驱动电路一般由调速器和功率放大器组成,通过对电流的控制来实现对电机的精确控制。
传感器是一种用于检测电机转动状态的装置,主要用于监控电机的位置和速度。
传感器可以是光电传感器、霍尔传感器等。
当电机旋转到指定位置时,传感器会发出信号,将信号传输给控制系统。
步进电机的工作原理是利用保持磁场的定子和改变磁场的转子之间的相互作用来实现电机的旋转。
当定子的磁场与转子的磁场相互作用时,转子会发生磁力作用,从而使步进电机旋转。
步进电机根据不同的控制方式可以分为开环步进电机和闭环步进电机。
开环步进电机是通过控制驱动电路向电机提供脉冲信号来控制电机的旋转角度和速度。
当驱动电路接收到一个脉冲信号后,会向电机通入一定电流,使电机转动一个固定的角度。
通过不断输入脉冲信号,可以实现电机的连续旋转。
闭环步进电机是在开环步进电机的基础上增加了位置反馈系统。
闭环步进电机通过传感器检测电机的位置和速度,并将信息返回给驱动电路。
驱动电路根据传感器的反馈信号来调整电流的大小和方向,实现对电机转动的精确控制。
步进电机具有结构简单、控制方便、输出扭矩大等优点,常应用于机床、自动控制系统、印刷设备等领域。
简述步进电机的工作原理
简述步进电机的工作原理步进电机是一种特殊的电动机,其运动是由控制信号驱动的,每次控制信号的到来会使电机向前或向后转动一定的角度。
步进电机的工作原理是通过电磁场的变化来实现转动。
本文将从步进电机的结构、原理、分类及应用等方面进行详细阐述。
一、步进电机的结构步进电机由转子和定子两部分组成。
转子是由一组磁极组成,通常有两种类型:永磁转子和电磁转子。
定子是由一组线圈组成,线圈的数目和磁极数目相等。
当通电时,定子线圈中会产生磁场,与磁极相互作用,从而使转子转动。
二、步进电机的原理步进电机的原理是利用电磁场的变化来实现转动。
当定子线圈通电时,会产生磁场,磁场会与转子的磁极相互作用,从而使转子转动。
通常情况下,步进电机是通过控制信号来控制定子线圈的通断,从而实现电机的转动。
控制信号的波形可以是脉冲信号、方波信号等。
三、步进电机的分类步进电机根据其结构和工作原理的不同,可以分为以下几种类型: 1、永磁式步进电机永磁式步进电机的转子由永磁体组成,定子由线圈组成。
当定子线圈通电时,会产生磁场,与永磁体相互作用,从而使转子转动。
永磁式步进电机具有结构简单、工作可靠、转矩大等优点。
2、单相步进电机单相步进电机是一种简单的步进电机,由一组线圈和一个铁芯组成。
当线圈通电时,会产生磁场,与铁芯相互作用,从而使转子转动。
单相步进电机的结构简单,但转矩较小,通常用于一些低功率的应用。
3、双相步进电机双相步进电机是一种常用的步进电机,由两组线圈和一个铁芯组成。
当两组线圈交替通电时,会产生磁场,与铁芯相互作用,从而使转子转动。
双相步进电机具有转矩大、精度高等优点,广泛应用于一些自动化设备中。
4、混合式步进电机混合式步进电机是一种综合了永磁式和电磁式步进电机的特点的电机。
其转子由永磁体和电磁线圈组成,具有转矩大、精度高等优点,广泛应用于一些高精度的自动化设备中。
四、步进电机的应用步进电机具有结构简单、精度高、转矩大等优点,广泛应用于一些自动化设备中。
步进电机组成
步进电机组成
步进电机是一种特殊的电机,可将自身分隔为若干微小的步骤,每一步骤位置精度高,速度稳定,静态转矩大,具有运行平稳、低速大力矩、无可预知运动轨迹等特点。
步进电
机由驱动电路和执行机构两部分组成。
本文主要介绍步进电机的组成。
1.转子
步进电机的转子是是一种铁心,分为面式和梯级式,其中面式转子分为两种又分别是
单磁极和双磁极。
转子内部装有永磁体或电磁体及驱动器,转子轴两端包承托轴承。
2.定子
步进电机的定子是一种线圈,线圈数目成对数,一般为2、4、6、8等,定子线圈永磁体,通过钢质下盖板进行固定。
3.齿轮
步进电机齿轮是由定子齿和转子齿组成,定子齿是定子铁芯上端的凹槽,转子齿是转
子铁芯上端的凸起,定子齿和转子齿相互迭合,形成啮合关系,在电磁作用或永磁作用下
转动。
4.导轨
步进电机导轨是由定子铁芯的凸起和转子铁芯组成,通过精密加工形成导轨。
导轨可
使结构更完善,使得步进电机的精度更高。
5.端盖
步进电机的端盖主要是保护电机内部之措施,便于更换零部件,一般分为前端盖和后
端盖,分别固定在电机的前端和后端。
6.电路板
步进电机的电路板主要是控制步进电机的转动,控制器可使用CPLD、FPGA甚至是单片机,驱动元件则可采用酷派电流电压高斯道等电子器件。
电路板是步进电机中重要的组成
部分,可使步进电机快速响应,具有高速、高分辨率的优良性能。
以上即是步进电机的主要组成部分,总的来说步进电机由转子、定子、齿轮、导轨、
端盖、电路板等组成。
每个组成部分都在不同的范畴内发挥着重要的作用,组成了完整的
步进电机。
步进电动机驱动控制原理

步进电机控制步进电动机一、步进电动机的组成和种类二、步进电动机的工作原理2.1.1B'B'C'C'这种工作方式下这种工作方式下,,三个绕组依次通电一次为一个循环周期个循环周期,,一个循环周期包括三个工作脉冲一个循环周期包括三个工作脉冲,,所以称为三相单三拍工作方式以称为三相单三拍工作方式。
按A →B →C →A →……的顺序给三相绕组轮流通电轮流通电,,转子便一步一步转动起来转子便一步一步转动起来。
每一拍转过30°(步距角步距角)),每个通电循环周期每个通电循环周期(3(3(3拍拍)转过90°(一个齿距角一个齿距角))。
2.1 2.1 步进电动机步进电动机步进电动机结构与工作原理结构与工作原理2.1.2 三相六拍按A →AB →B →BC →C →CA 的顺序给三相绕组轮流通电序给三相绕组轮流通电。
这种方式可以获得更精确的控制特性获得更精确的控制特性。
4123齿与A、A' 对齐对齐。
对齐,,又转324齿与B、B´对齐三相反应式步进电动机的一个通电循环周期如下期如下::A →AB →B →BC →C →CA ,每个循环周期分为六拍环周期分为六拍。
每拍转子转过15°(步距角步距角),),),一一个通电循环周期环周期((6拍)转子转过90°(齿距角齿距角))。
与单三拍相比与单三拍相比,,六拍驱动方式的步进角更小,更适用于需要精确定位的控制系统中更适用于需要精确定位的控制系统中。
2.1.3 三相双三拍按AB→BC→CA的顺序给三相绕组轮流通每拍有两相绕组同时通电。
电。
每拍有两相绕组同时通电。
B'C'B'C'B'C'360°电机转动的电机转动的工作原理演示工作原理演示总结总结::错齿是步进电动机旋转的根本原因齿距角是齿距角是99°;定子仍是6个磁极个磁极,,但每个磁极表面加工有五个和转子一样的齿面加工有五个和转子一样的齿。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机的结构
步进电机是一种电机类型,其结构主要由转子、定子、磁极等组成。
其中,转子为四个或更多个磁极的旋转式磁体,定子则为包含同样数量磁极的电磁线圈。
步进电机的转子受到定子磁场的作用而旋转,每当电流改变方向时,转子就会停下来。
这使得步进电机可以非常精确地控制旋转角度和速度。
在步进电机中,磁极数越多,旋转角度就越小。
这使得步进电机非常适合需要精确控制旋转角度和速度的应用领域,例如打印机、激光切割机等。
另外,步进电机的结构还包括一些辅助部件,例如轴承、减速器、编码器等。
这些部件可以进一步提高步进电机的性能和精度,使其更加适合各种应用场景。
- 1 -。