两相步进电机驱动器工作原理
两相四线励磁式步进电机的工作原理

两相四线励磁式步进电机的工作原理直接驱动型两相四线励磁式步进电机是一种常用的电机类型,其工作原理主要基于磁场的相互作用和磁力耦合原理。
下面详细介绍两相四线励磁式步进电机的工作原理。
具体来说,两相四线励磁式步进电机的工作原理主要分为两个步骤:1.步进驱动原理:
两相四线步进电机的两个线圈分别接到步进电机驱动器的两个输出相位上,一般为A相和B相。
驱动器根据输入的控制信号产生特定的输出电流,这个电流会在线圈中形成磁场。
以A相和B相线圈的通电情况为例:
-当A相线圈通电时,会在转子上形成一个磁场,此时转子会被磁场吸引,使得转子的一个极向A相线圈移动。
-接着,当A相线圈断电,B相线圈通电时,转子的磁极会向B相线圈靠近,从而使得转子继续移动。
-反复循环A相和B相线圈的通电和断电操作,就可以实现步进电机的转动。
2.电磁耦合原理:
在实际运行中,为了使线圈产生的磁场与转子上的磁场相互作用更加有效,通常会在步进电机系统中加入转子上的永磁体,也可以通过其他方式加入磁场。
当线圈通电时,线圈的磁场将与永磁体形成磁力耦合。
这种耦合作用会产生一个力矩,使得转子受到一个力的作用,从而转动到与线圈磁场相对应的位置。
总结起来,两相四线励磁式步进电机的工作原理主要基于磁场的相互作用和磁力耦合原理。
通过对线圈通电和断电的控制,以及线圈磁场与转子上的磁场之间的相互作用,就可以实现步进电机的旋转运动。
这种步进电机在控制精度、转速范围和扭矩等方面具有较好的性能,广泛应用于工业控制、自动化设备等领域。
2相4线步进电机 驱动原理

2相4线步进电机驱动原理2相4线步进电机是一种常见的步进电机类型,它由两组线圈组成,每组线圈有两根引线。
它具有较高的分辨率和较低的振动噪音,广泛应用于打印机、3D打印机、数控机床等领域。
驱动原理是指如何实现步进电机的精确控制和转动。
1.电路结构:2相4线步进电机的驱动电路通常采用H桥电路。
H桥电路由4个功率晶体管(MOSFET)组成,分为上下两个桥,每个桥由两个晶体管组成。
上桥、下桥分别与步进电机的两个线圈相连。
2.相序控制:步进电机的转动是通过给线圈施加电流来实现的。
相序控制是指按照一定的顺序给线圈施加电流,以使电机按照设定的步进角度转动。
2相4线步进电机的相序控制有两种方式:全步进控制和半步进控制。
全步进控制是指每次给线圈施加一个相位的电流,使得电机转动一个步进角度。
如A相线圈为高电平,B相线圈为低电平,则电机转动一个步进角度。
然后保持两个相位的电平状态不变,电机保持静止。
半步进控制是在全步进控制的基础上,通过改变线圈的电流方向和大小,使电机转动一个半步进角度。
首先给A相线圈施加高电平,电机转动一个步进角度,然后将A相线圈变为低电平,同时给B相线圈施加高电平,电机再转动一个步进角度。
这样,电机将以更小的角度精确转动。
3.驱动方式:步进电机的驱动方式有两种:双极性和单极性。
双极性驱动是指在步进电机的两个线圈中,每个线圈有两个施加电流的方向,即正向和反向。
这种驱动方式可以实现较高的转动力矩。
单极性驱动是指每个线圈只有一个施加电流的方向,另一个方向不施加电流。
这种驱动方式可以简化驱动电路的设计,但转动力矩相对较小。
4.驱动器选择:对于2相4线步进电机,需要选择合适的驱动器。
驱动器是电机与控制信号之间的接口电路,可以根据输入信号控制电机转动。
驱动器通常具有以下功能:-产生恰当的相序控制信号-控制每个线圈的电流-限制电流的峰值和保护电机常见的驱动器有步进电机芯片、步进电机驱动板等。
在选择驱动器时,需要考虑电机的电流和电压要求、控制信号的格式和接口、驱动器的工作温度等因素。
两相步进电机的原理

两相步进电机的原理引言:一、两相步进电机的结构和组成二、两相步进电机的工作原理1.绕组激励原理两相步进电机的定子两相绕组A、B通过电流激励产生磁场。
当两相绕组通电时,A相绕组产生的磁场方向与B相绕组产生的磁场方向相反,从而形成了一个磁场的转向。
根据两相绕组的通电情况不同,可以产生四种不同的磁场组合方式:A相通电,B相通电,A相通电,B相断电,A相断电,B相通电,A相断电,B相断电。
这些不同的磁场组合方式使得电机的转子在不同的位置上产生一定的磁场力矩,以实现转动。
2.转子定位原理3.步进驱动原理两相步进电机的控制需要通过步进驱动器来实现。
步进驱动器根据输入信号进行处理,以控制绕组A、B的通电情况,从而控制转动步进电机。
步进驱动器通常是一个控制器和一个功率放大器的组合。
控制器接收指令信号,根据输入的指令信号生成控制信号,通过控制信号来控制功率放大器的开关状态,从而控制步进电机的转动。
4.步进电机的转动方式两相步进电机通常通过全步进和半步进两种方式来转动。
全步进是指每个电机步进信号引起转子移动一个步进角度,占转子一整个周期。
半步进是指每个电机步进信号引起转子移动半个步进角度,占转子一整个周期。
全步进和半步进的选择取决于具体应用的要求。
5.步进电机的特点(1)步进电机的步距可控,可以实现高精度的位置控制。
(2)步进电机的输出力矩与电机电源和控制信号有关,可调节。
(3)步进电机结构简单,成本低,容易实现自动化控制。
(4)步进电机可单独控制每个步进角度,从而实现多个电机同步工作。
结论:两相步进电机通过电磁力的转换和转子定位原理,实现了电机的转动。
电机通过步进驱动器的控制,可以实现不同步距、输出力矩可调节的特性。
因此,两相步进电机广泛应用于自动化控制领域,为各种机械设备和自动化系统提供了有效的转动驱动。
步进电机驱动器及细分控制原理
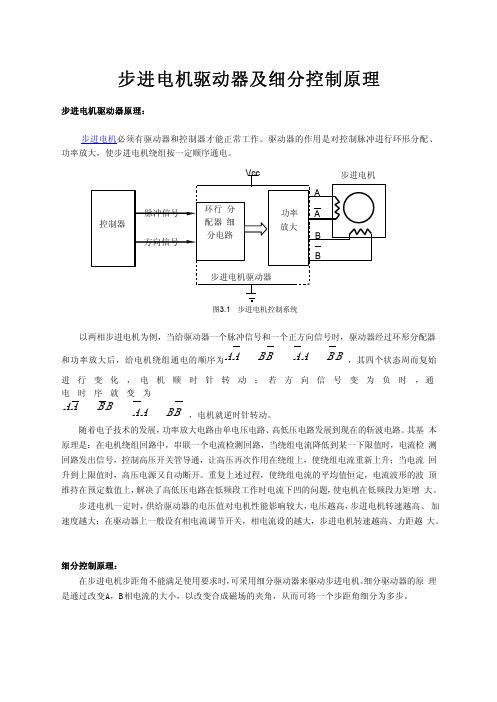
步进电机驱动器及细分控制原理步进电机驱动器原理:步进电机必须有驱动器和控制器才能正常工作。
驱动器的作用是对控制脉冲进行环形分配、功率放大,使步进电机绕组按一定顺序通电。
以两相步进电机为例,当给驱动器一个脉冲信号和一个正方向信号时,驱动器经过环形分配器和功率放大后,给电机绕组通电的顺序为AABB A A B B,其四个状态周而复始进行变化,电机顺时针转动;若方向信号变为负时,通电时序就变为AA B BA A BB,电机就逆时针转动。
随着电子技术的发展,功率放大电路由单电压电路、高低压电路发展到现在的斩波电路。
其基本原理是:在电机绕组回路中,串联一个电流检测回路,当绕组电流降低到某一下限值时,电流检测回路发出信号,控制高压开关管导通,让高压再次作用在绕组上,使绕组电流重新上升;当电流回升到上限值时,高压电源又自动断开。
重复上述过程,使绕组电流的平均值恒定,电流波形的波顶维持在预定数值上,解决了高低压电路在低频段工作时电流下凹的问题,使电机在低频段力矩增大。
步进电机一定时,供给驱动器的电压值对电机性能影响较大,电压越高,步进电机转速越高、加速度越大;在驱动器上一般设有相电流调节开关,相电流设的越大,步进电机转速越高、力距越大。
细分控制原理:在步进电机步距角不能满足使用要求时,可采用细分驱动器来驱动步进电机。
细分驱动器的原理是通过改变A,B相电流的大小,以改变合成磁场的夹角,从而可将一个步距角细分为多步。
定子A转子SNB B BSNA A(a)(b)AS NB B N S BS NA(c)(d)图3.2步进电机细分原理图仍以二相步进电机为例,当A、B相绕组同时通电时,转子将停在A、B相磁极中间,如图3.2。
若通电方向顺序按AA AABB BB BB AA AA AA BB BB BB AA,8个状态周而复始进行变化,电机顺时针转动;电机每转动一步,为45度,8个脉冲电机转一周。
与图2.1相比,它的步距角小了一半。
两相四线励磁式步进电机的工作原理

两相四线励磁式步进电机的工作原理
1.基本结构
2.步进电机的原理
步进电机的原理是通过改变定子线圈的磁通链接与转子永磁体之间的磁力,引起转子按固定步距旋转。
3.内置传感器
在步进电机中,通常会安装一种简单的位置传感器,用于检测转子的位置。
这些传感器可以是磁敏传感器,光电传感器等。
它们将转子的旋转角度信息反馈给控制系统,以便控制系统按照预定步距驱动电机。
4.1相序控制
相序控制信号是一种特殊的脉冲信号,通过改变脉冲宽度、时间间隔和相位关系等参数来产生。
相序控制信号的改变会改变线圈中的电流方向和大小,从而改变了电机的运行状态。
4.2运行状态
当相序控制信号与线圈配合时,线圈上的电流变化会产生磁场变化,磁场将影响到转子上的永磁体。
根据电流的大小和方向,转子会以一个步距的角度旋转。
然后,通过改变相序控制信号,线圈中的电流方向和大小发生变化,导致转子再次旋转。
4.3步距角度
步距角度是转子转动的一个固定的角度,它是电机的关键参数之一、步距角度的大小取决于电机的设计和驱动信号的频率。
较小的步距角度一般意味着更高的精度和更大的转矩。
5.应用领域
总的来说,两相四线励磁式步进电机通过电流的改变和控制系统的相序信号来驱动电机的旋转,从而实现精确定位的旋转运动。
它在许多自动化领域中发挥着重要的作用。
两相四线步进电机工作原理
两相四线步进电机工作原理
两相四线步进电机是一种在控制信号的驱动下精确旋转的电机。
它的工作原理涉及到电机的内部结构和驱动电路。
首先,两相四线步进电机由两个独立的线圈组成,每个线圈被连接到一个独立的电源。
线圈中的电流通过控制信号的驱动而改变,从而产生由永磁体产生的磁场。
这些磁场作用在电机的转子上,引起转子的旋转。
其次,步进电机的转子是多极的,通常由永磁材料制成。
每个极对应一个步进角度,也就是电机在一个完整的旋转周期内的运动距离。
然后,步进电机的驱动电路通常是由直流电源和电流控制器组成。
控制器接收来自外部控制信号的输入,并将其转化为适当的电流控制信号,供给到电机的线圈上。
通过控制信号的准确调节,电机可以实现精确的旋转步进。
最后,在工作过程中,控制信号进入驱动电路,由电流控制器将电流传送到线圈上,产生磁场并驱动转子转动。
不断重复这一过程,电机可以以一定的步进角度进行连续准确的旋转。
总之,两相四线步进电机的工作原理涉及到线圈中的电流控制和磁场的生成,通过外部控制信号的调节,实现精确旋转的目的。
两相步进电机的原理
两相步进电机的原理
两相步进电机是一种常见的电动机类型,由两个相位相差90度的电流组成。
它由电机本体、驱动器和控制器组成。
首先,步进电机的电机本体由定子和转子组成。
定子是由一组线圈或绕组组成,而转子则是由磁铁制成。
这些线圈通常被连接成两个相位,也就是两个相位线圈。
其次,驱动器是将控制信号转换为电流的设备。
它接收控制器发送的信号,并根据该信号驱动电机。
驱动器会根据控制信号的频率和电流大小来产生适当的电流,以控制步进电机的旋转速度和方向。
最后,控制器是通过发送脉冲信号来控制电机旋转的设备。
控制器通常根据应用需求生成相应的控制信号,以控制电机旋转的步长、速度和方向。
控制器可以是计算机、单片机或专用的控制电路。
在工作时,控制器会向驱动器发送脉冲信号。
驱动器根据脉冲信号的频率和电流大小生成相应的电流,并通过线圈将电流传递到电机本体。
这些电流会产生磁场作用于转子,引起电机旋转。
通过改变脉冲信号的频率和方向,控制器可以控制步进电机旋转的步长和速度。
例如,增加脉冲信号的频率可以增加电机的转速,而改变脉冲信号的方向可以改变电机的转向。
总而言之,两相步进电机的原理是通过控制器发送脉冲信号,驱动器产生相应的电流,通过线圈作用在电机本体,引起磁场作用于转子,从而实现电机的旋转。
两相步进电机原理
两相步进电机原理
两相步进电机是一种常见的电机类型,它具有简单的结构和精准的步进运动特性,广泛应用于各种自动化设备和精密仪器中。
本文将介绍两相步进电机的原理,包括其工作原理、结构特点和应用领域。
两相步进电机通过交替通电来驱动电机旋转,其原理是利用电磁场的相互作用
产生转矩,从而驱动电机实现步进运动。
两相步进电机的结构包括定子和转子两部分,定子上绕有两组电磁线圈,分别称为A相和B相。
转子上带有磁极,通电时,电流通过A相线圈产生磁场,使得转子磁极受到吸引或排斥,从而实现步进运动。
两相步进电机的工作原理基于磁场的相互作用,当A相线圈通电产生磁场时,转子会受到力矩的作用而转动一定角度,然后A相线圈断电,B相线圈通电,转
子再次转动一定角度。
通过不断交替通电,可以实现电机的连续步进运动。
这种步进运动的特性使得两相步进电机在需要精准位置控制和稳定运动的场合得到广泛应用。
两相步进电机具有结构简单、响应速度快、精度高等特点,因此在各种自动化
设备和精密仪器中得到广泛应用。
例如,在数控机床、印刷设备、纺织机械、医疗设备等领域都可以看到两相步进电机的身影。
由于其精准的步进运动特性,能够满足对位置控制要求较高的场合,因此在工业自动化领域有着重要的应用价值。
总之,两相步进电机是一种结构简单、精准可靠的电机类型,其原理基于电磁
场的相互作用,通过交替通电驱动电机实现步进运动。
在自动化设备和精密仪器中得到广泛应用,发挥着重要的作用。
希望本文的介绍能够帮助读者更好地了解两相步进电机的原理和应用。
步进电机 2相 工作原理
步进电机 2相工作原理
步进电机是一种将输入脉冲转换为角度或位置运动的电机。
它由定子、转子和驱动电路组成。
步进电机根据定子和转子之间的磁场变化来实现运动。
步进电机中常见的类型是2相步进电机。
它有两个相,每一相有一个线圈。
当电流通过其中一个线圈时,它会产生一个磁场,使得转子在特定的角度定位。
当电流通过另一个线圈时,另一组磁场将生成,将转子进一步旋转到下一个位置。
驱动电路为步进电机提供脉冲信号,每个脉冲信号对应转子旋转一定的角度(步进角)。
这些脉冲信号由外部控制器生成,并通过驱动电路转化为适当的电流供给给步进电机的线圈。
步进电机的驱动电路根据输入的脉冲信号来控制电流的频率和方向。
在每个脉冲信号的上升沿或下降沿,驱动电路会反转线圈的电流方向,使得磁场的极性也反转。
这就使得转子能够在不同的位置停留,从而实现旋转和定位。
步进电机的步进角度取决于电机的构造和驱动电路的设计。
通常,步进电机的步进角度可以为1.8度、0.9度甚至更小。
步
进角度越小,电机的运动精度越高。
但是,步进角度越小,所需的脉冲信号也会增加,因此需要更高的控制精度。
总的来说,2相步进电机通过输入脉冲信号来控制线圈的电流
和磁场,从而实现精确的角度或位置运动。
这种电机广泛应用
于打印机、机械设备、数码相机等需要准确控制角度和位置的场合。
两相混合步进电机
两相混合步进电机步进电机是一种电动机,它的特点是能够按照电脉冲信号进行定量控制旋转角度或者转速。
步进电机具有运动平稳、精度高、噪音低等优点,在电子设备领域被广泛应用。
在步进电机中,两相混合步进电机是一种常见的类型。
两相混合步进电机由于其结构简单、制造成本低等特点被广泛使用,尤其在微型化电子设备中得到了广泛应用。
它由步进电机驱动器、步进电机控制器和两相混合步进电机本体等组成。
本文将详细介绍两相混合步进电机的结构、原理、控制方法和应用等。
一、结构两相混合步进电机主要由定子、转子和绕组三个部分组成。
1. 定子两相混合步进电机的定子是由两个磁极和两个齿构成,其中每个齿上都有一个线圈。
定子上线圈的两端经过连接电源后会形成一个有规律的磁场。
当极对应的两个线圈分别接通时,就会形成两个北极和两个南极的交替磁场,从而形成有规律的磁场变化。
2. 转子两相混合步进电机的转子是由两个部分组成:一个是磁极,另一个是齿。
磁极分为南、北两极,随着定子上线圈发生变化而转动。
而齿则是由数个齿齿缝组成。
3. 绕组两相混合步进电机的绕组是由两个线圈组成,每个线圈绕制在定子两个相邻齿上,线圈之间隔一个齿缝。
两个线圈相位差90度左右,当电源连接时,两个线圈将会产生90度的相位差异,从而驱动转子转动。
二、工作原理两相混合步进电机的工作原理是将电信号转换成机械运动。
当控制器向步进电机驱动器发送电脉冲信号后,驱动器的电路就会根据电脉冲信号控制电源的开关,使得电机绕组产生磁场的变化。
这时磁场将会影响到转子的位置,使得转子的角度发生改变。
如此重复,电机就会按照电脉冲信号控制的角度或转速旋转。
三、控制方法1. 开环控制开环控制是指不考虑电机实际位置的控制方法,仅通过发送电脉冲信号的方式控制电机的角度或转速,缺点是容易因为负载或摩擦力而出现角度偏差。
闭环控制是指通过检测电机实际位置来进行控制。
通常采用编码器等设备来检测电机的转动位置及速度信息,将检测结果反馈给控制器进行调整控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
两相步进电机驱动器工作原理
1. 步进电机的工作原理
该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图
开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:图2.步进电机工作时序波形图
2.基于AT89C2051的步进电机驱动器系统电路原理
图3 步进电机驱动器系统电路原理图
A T89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。
图中L1为步进电机的一相绕组。
A T89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
图3中的RL1~RL4为绕组内阻,50Ω电阻是一外接电阻,起限流作用,也是一个改善回路时间常数的元件。
D1~D4为续流二极管,使电机绕组产生的反电动势通过续流二极管(D1~D4)而衰减掉,从而保护了功率管TIP122不受损坏。
在50Ω外接电阻上并联一个200μF电容,可以改善注入步进电机绕组的电流脉冲前沿,提高了步进电机的高频性能。
与续流二极管串联的200Ω电阻可减小回路的放电时间常数,使绕组中电流脉冲的后沿变陡,电流下降时间变小,也起到提高高频工作性能的作用。
3.软件设计
该驱动器根据拨码开关KX、KY的不同组合有三种工作方式供选择:
方式1为中断方式:P3.5(INT1)为步进脉冲输入端,P3.7为正反转脉冲输入端。
上位机(PC机或单片机)与驱动器仅以2条线相连。
方式2为串行通讯方式:上位机(PC机或单片机)将控制命令发送给驱动器,驱动器根据控制命令自行完成有关控制过程。
方式3为拨码开关控制方式:通过K1~K5的不同组合,直接控制步进电机。
当上电或按下复位键KR后,AT89C2051先检测拨码开关KX、KY的状态,根据KX、KY 的不同组合,进入不同的工作方式。
以下给出方式1的程序流程框图与源程序。
在程序的编制中,要特别注意步进电机在换向时的处理。
为使步进电机在换向时能平滑过渡,不至于产生错步,应在每一步中设置标志位。
其中20H单元的各位为步进电机正转标志位;21H单元各位为反转标志位。
在正转时,不仅给正转标志位赋值,也同时给反转标志位赋值;在反转时也如此。
这样,当步进电机换向时,就可以上一次的位置作为起点反向运动,避免了电机换向时产生错步。
图4 方式1程序框图
方式1源程序:
MOV 20H,#00H ;20H单元置初值,电机正转位置指针
MOV 21H,#00H ;21H单元置初值,电机反转位置指针
MOV P1,#0C0H ;P1口置初值,防止电机上电短路
MOV TMOD,#60H ;T1计数器置初值,开中断
MOV TL1,#0FFH
MOV TH1,#0FFH
SETB ET1
SETB EA
SETB TR1
SJMP $
;***********计数器1中断程序************
IT1P: JB P3.7,FAN ;电机正、反转指针
;*************电机正转*****************
JB 00H,LOOP0
JB 01H,LOOP1
JB 02H,LOOP2
JB 03H,LOOP3
JB 04H,LOOP4
JB 05H,LOOP5
JB 06H,LOOP6
JB 07H,LOOP7
LOOP0: MOV P1,#0D0H
MOV 20H,#02H
MOV 21H,#40H
AJMP QUIT
LOOP1: MOV P1,#090H
MOV 20H,#04H
MOV 21H,#20H
AJMP QUIT
LOOP2: MOV P1,#0B0H
MOV 20H,#08H
MOV 21H,#10H
AJMP QUIT
LOOP3: MOV P1,#030H
MOV 20H,#10H
MOV 21H,#08H
AJMP QUIT
LOOP4: MOV P1
,#070H
MOV 20H,#20H
MOV 21H,#04H
AJMP QUIT
LOOP5: MOV P1,#060H
MOV 20H,#40H
MOV 21H,#02H
AJMP QUIT
LOOP6: MOV P1,#0E0H
MOV 20H,#80H
MOV 21H,#01H
AJMP QUIT
LOOP7: MOV P1,#0C0H
MOV 20H,#01H
MOV 21H,#80H
AJMP QUIT
;***************电机反转***************** FAN: JB 08H,LOOQ0
JB 09H,LOOQ1
JB 0AH,LOOQ2
JB 0BH,LOOQ3
JB 0CH,LOOQ4
JB 0DH,LOOQ5
JB 0EH,LOOQ6
JB 0FH,LOOQ7
LOOQ0: MOV P1,#0A0H
MOV 21H,#02H
MOV 20H,#40H
AJMP QUIT
LOOQ1: MOV P1,#0E0H
MOV 21H,#04H
MOV 20H,#20H
AJMP QUIT
LOOQ2: MOV P1,#0C0H
MOV 21H,#08H
MOV 20H,#10H
AJMP QUIT
LOOQ3: MOV P1,#0D0H
MOV 21H,#10H
MOV 20H,#08H
AJMP QUIT
LOOQ4: MOV P1,#050H
MOV 21H,#20H
MOV 20H,#04H
AJMP QUIT
LOOQ5: MOV P1,#070H
MOV 21H,#40H
MOV 20H,#02H
AJMP QUIT
LOOQ6: MOV P1,#030H
MOV 21H,#80H
MOV 20H,#01H
AJMP QUIT
LOOQ7: MOV P1,#0B0H
MOV 21H,#01H
MOV 20H,#80H
QUIT: RETI
END
4.结论
该驱动器经实验验证能驱动0.5N.m的步进电机。
将驱动部分的电阻、电容及续流二极管的有关参数加以调整,可驱动1.2N.m的步进电机。
该驱动器电路简单可靠,结构紧凑,对于I/O口线与单片机资源紧张的系统来说特别适用。