2相四线-四相五线-四相六线步进电机接线及驱动方法
关于步进电机接线说明

关于步进电机接线说明首先,步进电机分为两相步进电机、三相步进电机、五相步进电机,我要说的是两相步进电机的接线,没有电机图子的情况。
两相步进电机分为4线、6线、8线(如图1),主要是电机的引出线不一样。
4线步进电机只能接双极驱动器,而6线和8线步进电机可以连接单级驱动器和双极驱动器。
虽然6线和8线步进电机能灵活适应不同的驱动器,但是也给接线带来不少麻烦。
随着步进电机驱动技术的发展,目前市场上主要还是以双极性的步进电机驱动器为主。
市场上的2MD320、2MD542这些驱动器都是双极驱动器,它们对应电机的接线只有4条线,A+、A-、B+、B-(如图2)。
图1图2对于4线的步进电机接线会比较简单,如果有图纸的话对应图纸把步进电机的A+、A-、B+、B-接到步进电机驱动器的A+、A-、B+、B-这样就可以了。
这里我想说的是没有图纸怎么办?电机因为各种原因(原因太多)到我手上就是没有图纸,如果你有请跳过。
这种情我们可以通过万用表来区别哪两条线是一相(如图3)。
图3图44线步进电机:用万用表的表笔测量任意两条线,如果有阻值(万用表发出“嘀嘀”声),说明这两条线是一相(如图4)A+、A-或B+、B-。
如果没有阻值,换一条线再测,直到有阻值。
确定好一相,剩下的两条线就是另外一相。
6线步进电机:和4线步进电机一样,先找出一相的线。
6线步进电机一相有3条线(如图4)。
所以测量时有三条线是有阻值的A+、NC、A-,(A+NC)+(NC A-)=(A+A-)。
这样就能确好一相。
用同样的方法测出另外一相。
8线步进电机:8线步进电机单用万用表是难以分出相序的,还要有示波器才能分出相序。
8线步进电机里面有4个线圈(如图5),首先我们用用万用表分别找出4个线圈对应的线(如图6),方法和4线步进电机的一样。
图5图6找到4个线圈后,我们就可以通过示波器把A相和B相区分出来。
1、把任意两个线圈接入示波器的表笔(如图7)。
2、转动步进电机的轴,电机产生感应电压。
2相4线步进电机 驱动原理

2相4线步进电机驱动原理2相4线步进电机是一种常见的步进电机类型,它由两组线圈组成,每组线圈有两根引线。
它具有较高的分辨率和较低的振动噪音,广泛应用于打印机、3D打印机、数控机床等领域。
驱动原理是指如何实现步进电机的精确控制和转动。
1.电路结构:2相4线步进电机的驱动电路通常采用H桥电路。
H桥电路由4个功率晶体管(MOSFET)组成,分为上下两个桥,每个桥由两个晶体管组成。
上桥、下桥分别与步进电机的两个线圈相连。
2.相序控制:步进电机的转动是通过给线圈施加电流来实现的。
相序控制是指按照一定的顺序给线圈施加电流,以使电机按照设定的步进角度转动。
2相4线步进电机的相序控制有两种方式:全步进控制和半步进控制。
全步进控制是指每次给线圈施加一个相位的电流,使得电机转动一个步进角度。
如A相线圈为高电平,B相线圈为低电平,则电机转动一个步进角度。
然后保持两个相位的电平状态不变,电机保持静止。
半步进控制是在全步进控制的基础上,通过改变线圈的电流方向和大小,使电机转动一个半步进角度。
首先给A相线圈施加高电平,电机转动一个步进角度,然后将A相线圈变为低电平,同时给B相线圈施加高电平,电机再转动一个步进角度。
这样,电机将以更小的角度精确转动。
3.驱动方式:步进电机的驱动方式有两种:双极性和单极性。
双极性驱动是指在步进电机的两个线圈中,每个线圈有两个施加电流的方向,即正向和反向。
这种驱动方式可以实现较高的转动力矩。
单极性驱动是指每个线圈只有一个施加电流的方向,另一个方向不施加电流。
这种驱动方式可以简化驱动电路的设计,但转动力矩相对较小。
4.驱动器选择:对于2相4线步进电机,需要选择合适的驱动器。
驱动器是电机与控制信号之间的接口电路,可以根据输入信号控制电机转动。
驱动器通常具有以下功能:-产生恰当的相序控制信号-控制每个线圈的电流-限制电流的峰值和保护电机常见的驱动器有步进电机芯片、步进电机驱动板等。
在选择驱动器时,需要考虑电机的电流和电压要求、控制信号的格式和接口、驱动器的工作温度等因素。
步进电机原理接线

2相四线,四相五线,四相六线步进电机接线及驱动方法分类:单片机2010-07-18 09:24 5085人阅读评论(9) 收藏举报步进电机原理按照常理来说,步进电机接线要根据线的颜色来区分接线。
但是不同公司生产的步进电机,线的颜色不一样。
特别是国外的步进电机。
那么,步进电机接线应该用万用表打表。
步进电机内部构造如下图:通过上图可知,A,~A是联通的,B和~B是联通。
那么,A和~A是一组a,B和~B是一组b。
不管是两相四相,四相五线,四相六线步进电机。
内部构造都是如此。
至于究竟是四线,五线,还是六线。
就要看A和~A之间,B和B~之间有没有公共端com抽线。
如果a组和b组各自有一个com端,则该步进电机六线,如果a和b组的公共端连在一起,则是5线的。
所以,要弄清步进电机如何接线,只需把a组和b组分开。
用万用表打。
四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。
所以,用万用表测,不连通的是一组。
五线:由于五线中,a和b组的公共端是连接在一起的。
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。
对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。
六线:a和b组的公共抽线com端是不连通的。
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。
对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机相关概念相数:产生不同对极N、S磁场的激磁线圈对数。
常用m表示。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
四相步进电机驱动电路及驱动程序设计
四相步进电机驱动电路及驱动程序设计我们用一个单片机控制多个步进电机指挥跳舞机器人的双肩、双肘和双脚伴着音乐做出各种协调舒缓充满感情的动作,荣获一等奖。
电路采用74373锁存,74LS244和ULN2003作电压和电流驱动,单片机(Atc52)作脉冲序列信号发生器。
程序设计基于中断服务和总线分时利用方式,实时更新各个电机的速度、方向。
整个舞蹈由运动数据所决定的一截截动作无缝连接而成。
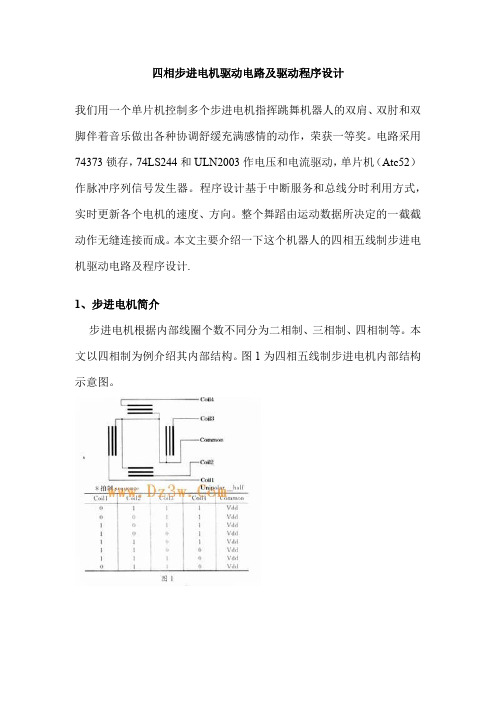
本文主要介绍一下这个机器人的四相五线制步进电机驱动电路及程序设计.1、步进电机简介步进电机根据内部线圈个数不同分为二相制、三相制、四相制等。
本文以四相制为例介绍其内部结构。
图1为四相五线制步进电机内部结构示意图。
2、四相五线制步进电机的驱动电路电路主要由单片机工作外围电路、信号锁存和放大电路组成。
我们利用了单片机的I/O端口,通过74373锁存,由74LS244驱动,ULN2003对信号进行放大。
8个电机共用4bit I/O端口作为数据总线,向电机传送步进脉冲。
每个电机分配1bit的I/O端口用作74373锁存信号,锁存步进电机四相脉冲,经ULN2003放大到12V驱动电机运转。
电路原理图(部分)如图2所示。
(1)Intel 8051系列单片机是一种8位的嵌入式控制器,可寻址64K字节,共有32个可编程双向I/O口,分别称为P0~P3。
该系列单片机上集成8K的ROM,128字节RAM可供使用。
(2)74LS244为三态控制芯片,目的是使单片机足以驱动ULN2003。
ULN2003是常用的达林顿管阵列,工作电压是12V,可以提供足够的电流以驱动步进电机。
关于这些芯片的详细介绍可参见它们各自的数据手册。
(3)74373是电平控制锁存器,它可使多个步进电机共用一组数据总线。
我们用P1.0~P1.7作为8个电机的锁存信号输出端,见表1。
这是一种基于总线分时复用的方式,以动态扫描的方式来发送控制信号,这和高级操作系统里的多任务进程调度的思想一致。
[整理]2相4线步进电机
![[整理]2相4线步进电机](https://img.taocdn.com/s3/m/bb38b10d87c24028915fc3f0.png)
通过上图可知,A,~A是联通的,B和~B是联通。
那么,A和~A是一组a,B和~B是一组b。
不管是两相四相,四相五线,四相六线步进电机。
内部构造都是如此。
至于究竟是四线,五线,还是六线。
就要看A和~A之间,B和B~之间有没有公共端com抽线。
如果a组和b 组各自有一个com端,则该步进电机六线,如果a和b组的公共端连在一起,则是5线的。
所以,要弄清步进电机如何接线,只需把a组和b组分开。
用万用表打。
四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。
所以,用万用表测,不连通的是一组。
五线:由于五线中,a和b组的公共端是连接在一起的。
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。
对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。
六线:a和b组的公共抽线com端是不连通的。
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。
对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机相关概念:相数:产生不同对极N、S磁场的激磁线圈对数。
常用m表示。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。
两相4线步进电机驱动时序

两相4线步进电机驱动时序
无意中间从网上看到两个人的发言,我总结了一下终于把两相4线步进电机脉冲搞定了.
这个图是我自己画的,从图中可以看出来,要实现步进电机的转动,可以用以下两种方式:
(1)8拍的方式
八个状态:1、在A与A-正电压,B与B-不给电悬空;2、在A与A-正电压,B 与B-也给正电压;3、A与A-不给电压悬空,B与B-正电压;4、A与 A-给负电压,B与B-给正电压;5、A与A-给负电压,B与B-不给悬空;6、A与A-给负电压,B与B-给负电压;7、A与A-不
给电悬空,B与B-给负电压;8、A与给正电压,B与B-给负电压;按以上八个状态轮流供电,控制一下脉宽应该就可以了。
四个引脚各一根控制线:A~H表示各线时序
A B C D E F G H
A 1 1 0 0 0 0 0 1
A- 0 0 0 1 1 1 0 0
B 0 1 1 1 0 0 0 0
B- 0 0 0 0 0 1 1 1 .........
(2)4拍的方式
我的方法
一般是电流驱动的。
我下面的a~ 和b~ 表示反向电流。
两相双二拍:
ab - a~b - a~b~ - ab~ 为一个转向。
ab - ab~ - a~b~ - a~b 为反向。
自己的一点体会:偶觉得两相4线电机 和 四相4线电机 差不多.(这从上面我画的图)也可以看出来,只不过物理上绕线的方式不同(这也导致编程上脉冲表的不同),在功能上是一样的.。
2相四线,四相五线,四相六线步进电机接线及驱动方法

2相四线,四相五线,四相六线步进电机接线及驱动方法步进电机原理按照常理来说,步进电机接线要根据线的颜色来区分接线 的步进电机,线的颜色不一样。
特别是国外的步进电机那么,步进电机接线应该用万用表打表。
~B 是一组b o 不管是两相四相,四相五线,四相六线步进电机。
内部构造都是如此。
至于究竟是四线,五线,还是六线。
就要看 A 和~A 之间,B 和B~之间有没有公共端com 抽线。
如果a 组和b 组各自有一个com 端,则该步进电机六线,如果 a 和b 组的公 共端连在一起,则是 5 线的。
但是不同公司生产B 和~B 是联通。
那么, A 和~A 是一组a , B 和通过上图可知,A, ~A 是联通的,步进电机内部构造如下图所以,要弄清步进电机如何接线,只需把 a 组和 b 组分开。
用万用表打。
四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。
所以,用万用表测,不连通的是一组。
五线:由于五线中,a和b组的公共端是连接在一起的。
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。
对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。
六线:a和b组的公共抽线com端是不连通的。
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。
对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机相关概念:相数:产生不同对极N S磁场的激磁线圈对数。
常用m表示。
拍数: 完成一个磁场周期性变化所需脉冲数或导电状态用n 表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD- DA-AB四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用9表示。
B =360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
步进驱动器接线图说明【解析】

很多人对步进驱动器接线可能有些不清楚,德科智控小编下面将从步进电机驱动器原理,步进电机工作原理方面来详细说明驱动器接线图。
步进电机是一种将电脉冲转化为角位移的执行机构。
当步进电机驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步进角)。
您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机的原理:步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,步进电机驱动器就是为步进电机分时供电的,多相时序控制器。
虽然步进电机已被广泛地应用,但步进电机并不能像普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进驱动器接口功能说明1、控制信号接口2、功率端口3、状态指示绿色LED 为电源指示灯,当驱动器接通电源时,该LED 常亮;当驱动器切断电源时,该LED 熄灭。
红色LED 为故障指示灯,当出现故障时,该指示灯根据故障类型,以0.2秒循环闪烁设定的次数.然后以1秒间隔继续重复以0.2秒循环闪烁设定的次数。
直到故障被用户清除,红色LED常灭。
故障类型对应的闪烁次数如下表:控制信号接线:1. 控制信号采用单端接线方式时,接线图如下图所示:注意:VCC为5V时,R短路;VCC为12V时,R为1K,大于0.125W电阻;VCC为24V时,R为2K,大于0.125W电阻;电阻必须接在控制信号端。
2.控制信号采用差分接线方式时,接线图如下图所示:差分接线方式(控制器差分输出)控制信号时序图注释1)T0: ENA(使能信号)应提前DIR 至少5mS,确定为高。
通常ENA+和ENA-悬空。
2)T1:DIR 至少提前PUL 下降沿3μs。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2相四线,四相五线,四相六线步进电机接线及驱动方法
步进电机工作原理:
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
按照常理来说,步进电机接线要根据线的颜色来区分接线。
但是不同公司生产的步进电机,线的颜色不一样。
特别是国外的步进电机。
那么,步进电机接线应该用万用表打表。
步进电机内部构造如下图:
通过上图可知,A,~A是联通的,B和~B是联通。
那么,A和~A是一组a,B和~B是一组b。
不管是两相四相,四相五线,四相六线步进电机。
内部构造都是如此。
至于究竟是四线,五线,还是六线。
就要看A和~A之间,B和B~之间有没有公共端com抽线。
如果a组和b组各自有一个com端,则该步进电机六线,如果a和b组的公共端连在一起,则是5线的。
所以,要弄清步进电机如何接线,只需把a组和b组分开。
用万用表打。
四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。
所以,用万用表测,不连通的是一组。
五线:由于五线中,a和b组的公共端是连接在一起的。
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。
对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。
六线:a和b组的公共抽线com端是不连通的。
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。
对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机相关概念:
相数:产生不同对极N、S磁场的激磁线圈对数。
常用m表示。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A.
步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)
静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。
此力矩是衡量电机体积(几何尺寸)的标准,与驱动电压及驱动电源等无关。
步进电机驱动
驱动步进电机,无非是给电机a和b组先轮流给连续的脉冲,步进电机就可以驱动了。
步进电机驱动码:
从图中可以看出来,要实现步进电机的转动,可以用以下两种方式:
(1)8拍的方式
八个状态:1、在A与A-正电压,B与B-不给电悬空;2、在A与A-正电压,B与B-也给正电压;3、A与A-不给电压悬空,B与B-正电压;4、A与A-给负电压,B与B-给正电压;5、A与A-给负电压,B与B-不给悬空;6、A与A-给负电压,B与B-给负电压;7、A与A-不给电悬空,B与B-给负电压;8、A与给正电压,B与B-给负电压;按以上八个状态轮流供电,控制一下脉宽应该就可以了。
四个引脚各一根控制线:A~H表示各线时序
A B C D E F G H
A 1 1 0 0 0 0 0 1
A- 0 0 0 1 1 1 0 0
B 0 1 1 1 0 0 0 0
B- 0 0 0 0 0 1 1 1 .........
(2)4拍的方式
我的方法
一般是电流驱动的。
我下面的a~ 和b~ 表示反向电流。
两相双二拍:
ab - a~b - a~b~ - ab~ 为一个转向。
ab - ab~ - a~b~ - a~b 为反向。
自己的一点体会:偶觉得两相4线电机和四相4线电机差不多.(这从上面我画的图)也可以看出来,只不过物理上绕线的方式不同(这也导致编程上脉冲表的不同),在功能上是一样的.。