基于AMESim和MATLAB联合仿真的EHA滑模变结构控制分析
基于AMESim和MATLAB/GUI的汽车起重机起升机构可视化联合仿真与分析
( 1 . 中 国矿 业 大 学 机 电工 程 学 院 ,江 苏 徐 州 2 2 1 1 1 6 ;
2 . 浙江大学 流体 动力 与机 电系统国家重点实验室 ,浙江 杭州
3 1 0 0 2 7 )
设计 起重 机 可视化 界 面 , 用 户 难 以观测 参 数 设 置 对 起
重机 的影 响 ; 文献 [ 5 ] 运用 S o l i d D y n a m i c s和 M A T L A B / S i m u l i n k 对S C A R A机器人进行了运 动学建模和
摘
要: 该文 以汽 车起 重机起 升 机 构 为研 究 对 象 , 首 先利 用 A ME S i m 软 件 建 立 了起 升 机 构 液 压 系统模
型, 然后在 MA T L A B / G U I 中设计 了起 升机 构 可视 化界 面 , 并通 过 编程 实现 了 A M E S i m和 M A T L A B / G U I 的联
件, 对 汽 车起重 机进 行联 合仿 真和 分析 , 能够 有效 提 高
行分 析 时 , 可 以通 过 G U I 界 面观 察参 数 设 置 对起 升 机 构运 动 的影 响 , 相 比于使用 单一 仿真 软件 , 联 合仿 真效
率更 高 。
设 计效 率 , 缩短 设计 周期 , 减 少 研发 成 本 l 2 J 。文 献 [ 3 ]
能, 为辅 助用 户设 计和 分析提供 了理论 基础 。
关键词: 汽车起 重机 ; 起 升机构 ; A ME S i m; MA T L A B / G U I ; 联 合仿 真 中图分 类号 : T H1 3 7 文 献标 志码 : B 文 章编 号 : 1 0 0 0 - 4 8 5 8 ( 2 0 1 3 ) 0 5 - 0 0 9 7 - 0 5
AMEsim与Matlab_simulink联合仿真技术
目录摘要 (1)0 引言 (1)1 联合仿真技术 (2)1.1 联合仿真技术的特点与应用 (2)1.2 联合仿真技术的实现途径 (2)2 联合仿真接口技术 (3)2.1 系统环境配置 (3)2.2 系统编译器配置 (3)3 联合仿真应用举例 (5)4 结论 (8)致谢 (8)参考文献 (9)AMESim与Matlab_Simulink联合仿真技术机械电子系0802班李敏M200870228摘要:根据AMESim与Matlab/Simulink软件各自的特点,对两者联合仿真技术进行了研究,解决了联合仿真的接口与实现问题,并把该技术应用于电液位置伺服系统的仿真,取得了良好的效果。
关键词:AMESim;Matlab/Simulink;联合仿真;接口Abstract:United Matlab/Simulink technique with AMESim and Matlab/Simulink was discussed based on their own characteristics. The problem of their interface and realization were solved. As an applied example, Matlab/Simulink of electro hydraulic servo-system was shown. Good results were achieved.Keywords:AMESim;Matlab/Simulink;United simulation;Interface0 引言传统的设计方法往往是通过反复的样品试制和试验来分析该系统是否达到设计要求,结果造成大量的人力和物力投入在样品的试制和试验上。
随着计算机仿真技术的发展,在工程系统的软件设计开发中,大量地采用了数值成型的方法,即通过建立系统的数值模型,利用计算机仿真使得大量的产品设计缺陷在物理成型之前就得到了处理,从而可以使企业在最短的时间、以最低的成本将新产品投放到市场。
基于AMESim-simulink仿真对混合动力汽车感应电机控制系统性能的研究
f 碍 ,+ o 【 , +一jd ’- 0 n
=
.
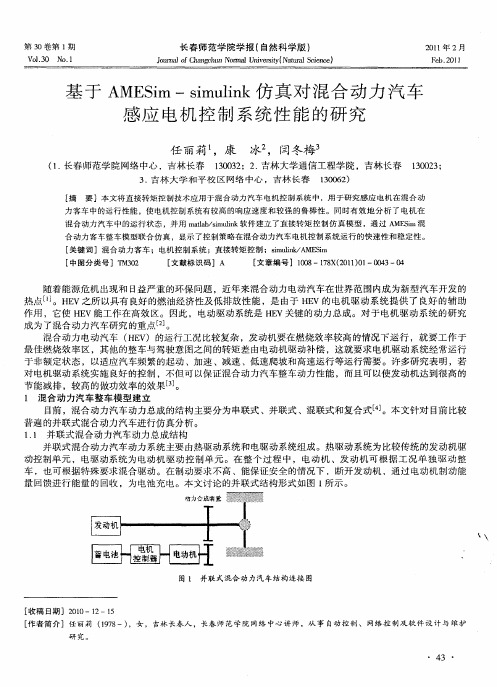
目前 ,混 合动 力汽 车动 力总成 的结 构主要 分为 串联式 、并 联式 、混联 式 和复合式 L。本文 针对 目前 比较 4 ] 普遍 的并联 式 混合 动力 汽车进 行仿 真分 析 。 1 1 并联 式混 合动 力汽 车动力 总成 结构 . 并联式 混 合动力 汽 车动力 系统 主要 由热驱 动系 统和 电驱 动系统组 成 。热驱 动系统 为 比较传 统 的发 动机驱 动控 制单元 ,电驱 动系统 为 电动机 驱 动 控制 单 元 。在 整 个 过程 中 ,电动 机 、发 动 机可 根 据 工 况 单 独 驱 动整 车 ,也可 根据 特殊 要求 ? 合驱 动 。在制 动要求 不高 、能保 证安 全 的情况下 ,断开发 动机 ,通过 电动机制 动能 昆 量 回馈进行 能 量 的 回收 ,为 电池充 电 。本 文讨 论 的并 联式 结构 形式 如 图 l 示 。 所
[ 中图分类号]T 0 M32
[ 文献标识码】A
[ 文章编号]10 —18 (0 10 — 0 3 4 0 8 7 X 2 1)1 04 —0
随着 能源 危机 出现 和 日益 严重 的环保 问题 ,近 年来? 合动 力 电动汽 车在世 界范 围 内成 为新 型汽 车开 发 的 昆 热点 n 。H V之所 以具有 良好 的燃 油经 济性及 低排 放性 能 ,是 由于 H V的 电机 驱 动 系统 提 供 了 良好 的 辅助 ] E E 作 用 ,它使 H V能工 作在 高效 区 。因此 ,电动 驱动 系统是 H V关键 的 动力 总成 。对 于 电机 驱 动 系统 的研 究 E E 成 为 了混合 动 力汽 车研究 的重 点 J 。 混合 动力 电动 汽车 ( E )的运行 工况 比较 复杂 ,发 动机要 在燃烧 效率 较高 的情况 下运 行 ,就 要 工作 于 HV 最佳 燃烧 效率 区 ,其他 的整 车与 驾驶意 图之 间的转 矩差 由 电动机驱 动补偿 ,这 就要求 电机 驱动 系统 经常 运行 于非 额定 状态 ,以适应 汽 车频 繁 的起 动 、加速 、减 速 、低 速爬 坡和 高速运 行等 运行需 要 。许多 研究 表 明 ,若 对 电机驱 动 系统实 施 良好 的控 制 ,不但 可 以保 证混合 动 力汽 车整车 动力性 能 ,而且可 以使 发动 机达 到很 高 的 节能 减排 ,较 高 的做功 效率 的效果 3。 l 混 合动 力汽 车整 车模 型建立
基于AMESim与Matlab/Simulink联合仿真技术的接口与应用研究
开发与设计 D i &Dvo et : ( eg e lmn ! / sn ep
基 于 A 与 Ma b\ ME i S m t l a S l k i mui n
联 合 仿 真 技 术 的 接 口与 应 用 研 究
4 )将 联 合 仿 真 的 许 可 证 文 件 lns.a 制 到 i eedt复 e AME i Sm安装 目录下 的 lns g i ei 文件夹 中。 e m 5 )确认 是 否在 AME i 中选 择 VC作 为编 译 器 。 sm 具体操 作 在 A sm— O i s AME i rf ecs " ME i p n— o Sm Pee ne ̄ r C mp ao/ aa tr 中。在 MAT . o itn P rme s li e L B命令 窗 口中输人 A 命令 Me- tD xs m ,选择 V . e C作 为编译器 。
种模 型,改变仿真参数 ,很有效地解 决仿 真技术 中的问
题。
A Sm作 为 一 个 完 整 的 系 统 工 程 仿 真 平 台, ME i Sm l k作为事实上 的控 制系统设 计 的标 准平 台。点对 i ui n 点的 AME i—ilik 口提供 了一个使用便捷 和行之 S S un 接 m nl 有效的工具用于 A Sm的被控对象模 型和控 制系统模 ME i 型之问的耦合分析 、同时利用 r A Sr 和 Sl lk的 ME i e iui n n 最佳功能 ,避 免了不同平台之间复杂模型 的重建。
i 。 m
法 国 I ai 公 司开发 的 A Sm是 当今领先 的流 mge n ME i
体 ,传动系统 和液 压/ 机械 系统 建模 ,仿真及 动力 学分
析软件。基于 Ma a tl 台的 Sm l k是动 态系统 仿真 lb平 iui n 领域 中著名的仿真集成环境 ,它在众多领域得 到广泛应 用 。S ui i lk借助 Ma m n t Mb的计算功能 ,可方便地建立各
基于AMESim的EHA主动悬架建模与控制研究

基于AMESim的EHA主动悬架建模与控制研究基于AMESim的EHA主动悬架建模与控制研究摘要:本文基于AMESim软件平台,对EHA(Electro-Hydrostatic Actuator)主动悬架进行建模与控制研究。
首先,介绍了EHA主动悬架相关的背景和意义,并详细分析了其工作原理。
然后,通过AMESim进行EHA主动悬架的建模与仿真分析,对其动力学特性进行研究。
接着,提出了一种基于PID控制器的悬架控制策略,并对其控制效果进行评估。
最后,对研究成果进行总结,并对未来研究的方向进行展望。
关键词:AMESim;EHA主动悬架;建模与仿真;PID控制;控制策略1. 引言随着汽车工业的不断发展,人们对悬架系统的需求也越来越多样化和个性化。
传统的被动悬架系统往往无法满足复杂路况下的使用需求,而EHA主动悬架由于其结构简单、响应速度快等特点,成为了悬架系统研究的热点之一。
本文旨在通过AMESim软件平台,对EHA主动悬架进行建模与控制研究,以提高其悬架性能和驾乘舒适度。
2. EHA主动悬架建模与动力学分析2.1 EHA主动悬架的工作原理EHA主动悬架主要由电动机、液压泵、液压缸和控制系统组成。
电动机通过转动液压泵产生液压能,再由液压缸将液压能转化为机械能,从而对悬架系统进行主动控制。
如图1所示为EHA主动悬架的结构示意图。
图1 EHA主动悬架的结构示意图2.2 EHA主动悬架的建模为了研究EHA主动悬架的动力学特性,需要进行合理的建模工作。
本文通过AMESim软件平台对EHA主动悬架进行建模,并通过仿真分析其动力学特性。
建模过程中,考虑了电动机的电磁特性、液压泵的流量特性以及液压缸的动力学特性等因素。
最终建立了EHA主动悬架的运动方程,通过仿真分析获得了悬架系统的响应曲线和动力学特性。
3. EHA主动悬架的控制策略研究为了实现对EHA主动悬架的控制,本文提出了一种基于PID控制器的控制策略。
PID控制器是一种经典的闭环控制方法,通过比较设定值和反馈值之间的误差,计算出控制输出。
AMEsim环境下EHA模型的建立与分析
AMEsim 环境下EHA模型的建立与分析于黎明王占林裘丽华(北京航空航天大学自动化科学与电气工程学院北京 100083)摘要适应大运飞机以及多电飞机的发展要求,传统的飞机飞行作动系统要发生大的变革,由中央液压源提供能量基本节流控制的液压作动系统将被大功率的电源供能的电力作动系统取代。
作为发展的过渡环节,电静液作动器是当前的研究与应用的热点。
本文详细介绍在AMEsim软件环境下EHA的建模与分析。
关键词电静液作动器 AMEsim 建模仿真Abstract : Conventional flight actuation systems will change greatly according tothe demands of large transporters and all-electric aircrafts, which employelectrical power supply by replacing central hydraulic power source andrestriction control. Being the development of novel actuaors, Electro-hydrosticactuators attract the research and application on them. Modeling and analysis ofEHA under AMEsim software introduces in this paper.Keywords, Electro-hydrostic actuator, AMEsim, Modeling, Simulation1 引言对大型飞机和全电飞机来说,减轻重量是一个关键的课题。
由此影响到飞机的飞行作动系统适应多电或全电飞机的发展而需要发生变革。
对法国新型的大型运输机A380来说,是首架采用电力能源作为飞控作动系统的第一供能源,取消传统的三套液压回路中的一个,采用2H-2E即双液压能源和双电力能源的能源分布结构。
amesim与matlab联合仿真步骤(自己总结)(精)(2021年整理精品文档)
(完整版)amesim与matlab联合仿真步骤(自己总结)(精)编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望((完整版)amesim与matlab联合仿真步骤(自己总结)(精))的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为(完整版)amesim与matlab联合仿真步骤(自己总结)(精)的全部内容。
Amesim 与 matlab 联合仿真参数设置实验软件平台Matlab2009a , amesimR8a , VC6.0 企业版(英文版步骤:1 将 VC++中的”vcvar32。
bat" 文件从 Microsoft Visual C++目录(通常是。
\Microsoft Visual Studio\VC98\Bin 中拷贝至 AMESim 目录下。
2 设置环境变量:我的电脑—〉属性—〉高级—〉环境变量。
设置AMESim 环境变量:变量名 AME ,值为其安装路径如安装在 C 盘中则值为C:\+amesim 安装路径。
设置 Matlab 环境变量:变量名 MATLAB 值为 D:\MATLAB,此处我安装的 matlab 在 D 盘根目录下。
确认在系统环境变量 PATH 中包含系统安装目录 C:\WINDOWS\system323 在 Matlab 的目录列表里加上 AMESim 与 Matlab 接口文件所在的目录%AME%\matlab\amesim。
File—〉 Set Path—〉 Add Folder 加上需要联合仿真的 amesim 文件目录和 C:\AMEsim\matlab\amesim(注意 R8A 版本是将%AME%\scripting\matlab\amesim 设置到 MATLAB 路径中加入matlab 默认路径中4 将联合仿真的许可证文件 licnese。
基于AMESim的EHPS系统的仿真及试验研究
基于AMESim的EHPS系统的仿真及试验研究
王乔
【期刊名称】《汽车零部件》
【年(卷),期】2015(000)003
【摘要】基于AMESim软件建立了电动液压助力转向(EHPS)系统的仿真模型,制定控制策略、导入样机参数运行仿真,仿真结果证明该EHPS系统可使车辆低速行驶转向时转向轻便以及高速行驶转向时有合适的路感反馈.结合仿真结果,搭建试验台架并进行试验,证明台架试验与仿真结果一致.
【总页数】4页(P29-32)
【作者】王乔
【作者单位】重庆交通大学,重庆400074
【正文语种】中文
【相关文献】
1.基于AMESim的5070TSLF4扫路车行走系统仿真与试验研究 [J], 林初仁
2.基于ADAMS和AMESim的泵送系统联合仿真与试验研究 [J], 贾剑峰;田润利;林涛;丁礼磊
3.基于AMESim的5070TSLF4扫路车行走系统仿真与试验研究 [J], 林初仁
4.基于AMESim工程车辆变速器电液控制系统的仿真与试验研究 [J], 王硕;田晋跃;徐刚
5.基于AMESim的旋耕机自动调平系统仿真分析与试验研究 [J], 吴帆;蒋蘋;胡文武;金生;陈庚
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于AMESim和MATLAB联合仿真的EHA滑模变结构控制分析纪铁铃;齐海涛;滕雅婷【摘要】分析了电动静液作动器(EHA,Electro-Hydrostatic Actuator)系统的结构组成与工作原理,建立了其数学模型,将滑模变结构控制用于控制EHA的位置环,建立了包含滑模变结构位置控制环、PI转速控制环、PI电流控制环的EHA控制器结构,并设计了滑模变结构控制器.最后使用AMESim和MATLAB软件建立了EHA 机械、液压部分的模型和电机、控制器的模型,进行联合仿真,并对仿真结果进行分析.仿真结果表明,滑模变结构用于控制EHA是可行的,并且可以提高系统的频响,使系统获得较大的刚度和较好的稳态精度.【期刊名称】《液压与气动》【年(卷),期】2016(000)003【总页数】6页(P19-24)【关键词】滑模变结构;EHA;AMESim;MATLAB;联合仿真【作者】纪铁铃;齐海涛;滕雅婷【作者单位】北京航空航天大学工程训练中心,北京100191;北京航空航天大学工程训练中心,北京100191;北京航空航天大学机械工程及自动化学院,北京100191【正文语种】中文【中图分类】TH137;V227引言功率电传(PBW,Power-By-Wire)作动器是未来多/全电飞机的关键技术,电动静液作动器(EHA)是功率电传作动器的主要形式,但由于EHA系统存在非线性和参数摄动,用简单的 PID 控制不能满足鲁棒性要求[1,2]。
滑模变结构控制中滑模动态的不变性使被控对象对非线性因素引起的系统不确定性具有理想的鲁棒性。
常规的控制系统通常采用连续性控制,而滑模变结构控制系统的“结构”是一种呈现开关特性的非连续性控制,这种开关特性与时间变化相关。
一般所说的“滑动模态”运动是指在系统的上述开关特性作用下按照预定状态轨迹进行高频小幅的上下运动[3~5]。
将滑模变结构控制应用于EHA控制中,将极大地弥补非线性因素对EHA 系统性能的影响,提升系统的鲁棒性,达到较好的稳态精度。
本研究针对EHA位置控制系统设计了一种合理的滑模变结构控制策略并针对其鲁棒性进行了仿真分析。
AMESim有丰富的模型库,在液压系统的建模和仿真方面有很大的优势。
在MATLAB/Simulink中建立控制系统模型更加准确。
AMESim和Simulink的联合仿真技术的应用不仅可以充分发挥AMESim在建立液压系统方面的优势,也可以充分发挥MATLAB/Simulink强大的数字处理能力来完成仿真[6~8]。
在AMESim中建立液压部分的模型,在MATLAB中建立滑模变结构控制系统模型,通过S-function接口将控制器算法程序写到控制系统中,并进行联合仿真,对结果进行分析。
EHA系统的结构组成和工作原理如图1所示。
EHA系统主要由DSP控制器、功率驱动单元、无刷直流电机、高压高速直轴式轴向柱塞泵、单向阀、蓄能式增压油箱、安全阀、阻尼旁通阀、作动筒、位移传感器等组成。
控制器接收上位机(飞控计算机)的输入指令以及各种反馈信号,通过相应的运算,给出电机的控制信号,并对整个EHA系统进行故障监测和控制。
柱塞泵根据电机转速输出相应的液压流量以控制作动筒。
增压油箱通过两个单向阀为系统进行补油,维持系统最低工作压力,防止气穴和空吸;单向阀使泵的回油和漏油可返回增压油箱,以维持EHA的闭式系统;安全阀用来防止柱塞泵和作动筒所产生的过高压力;阻尼旁通阀在作动器发生故障时开启,泵的输出流量通过旁通阀回到其吸油口,作动筒随动。
EHA系统中的直流无刷电机是实现控制的关键对象,通过电机转速的改变实现对泵流量的控制,其电势平衡方程用式(1)表示:式中: UEHA为直流电机控制电压;CEHA为电机反电势系数;ω为电机转速;REHA为电机电枢电阻;LEHA为电机电枢电感;iEHA为电机电流。
在EHA系统中,由于电机和泵是刚性同轴连接在一起的,其转矩平衡方程用式(2)表示:式中: TEHA为电机输出转矩;BEHA为电机-泵的总负载阻尼系数BEHA=Bmotor+Bpump;JEHA为电机-泵的总转动惯量JEHA=Jmotor+Jpump。
泵的选型是基于EHA系统对速度和负载力的要求,这里考虑双向定量柱塞泵。
电机和泵刚性连接,两者的转角、角速度等完全一致。
不考虑液压油的容积变化,泵的流量方程为:泵的力矩方程:式中: TL为泵的力矩;qb为泵的排量;pf为负载压力。
EHA系统中的作动筒为对称液压缸,其流量连续方程:式中: A为液压缸活塞面积;x为液压缸活塞位移;Ey为等效容积弹性模数;V 为液压缸总容积;Ctg为总泄漏系数。
作动筒的负载力平衡方程为:式中: mEHA为活塞与负载折算到活塞上的总质量;βEHA为活塞与负载运动的黏性阻尼系数;FEHA为外干扰力。
在滑模变结构控制器的设计中,以整个EHA系统作为研究对象,无法满足滑模变结构的控制要求,因此将电机转速作为控制对象来设计滑模变结构控制器,其控制方案框图如图2所示。
外环为总的位置环,接收上位机的输入指令及作动筒位置反馈信号,通过滑模变结构控制器给出直流电机的转速控制信号,再通过电机内部控制器,从而控制泵的转速,达到改变系统流量,对作动器输出位移进行伺服控制的目的。
通过式(3)~式(6)四个方程,将系统转化为三阶系统,设计取三个状态变量:位移、速度和加速度,它们分别是,经过推导可得系统状态方程为:滑模变结构控制器的设计包括两个关键问题,分别是设计合适的切换函数s(x)和变结构控制律u±(x),使其满足滑动模态的三个基本要素,保证滑模运动的顺利实现和良好的运动品质。
无外加负载的情况下,系统的状态空间方程可以写成:取切换函数:s=cx则:解得:构造李普诺夫函数:V=s2/2则:=s[cAx+cB(cB)-1(-cAx-εsgn(s)-ks)]指数趋近律滑模控制满足广义滑模条件,即满足存在性和可达性。
取切换函数:为使滑模面最后趋近稳定,令,解微分方程,取c1=100,c2=20。
采用指数趋紧律slaw=-εsgn(s)-ks,则有:令,将代入,得到控制律u:EHA系统中主要包括液压系统和控制系统两部分。
AMESim在液压系统的仿真方面具有较大优势,因此液压系统的建模在AMESim中完成;而MATLAB在控制系统建模方面功能强大,因此控制系统的建模在MATLAB/Simulink中完成。
根据EHA的结构组成和工作原理,在AMESim中建立如图3所示的模型。
通过S-function可以输出Simulink里的控制信号给电机和旁通阀;液压部分的模型可以返回传感器信号给控制器。
接口模块是由AMESim提供的,模块输入输出信号的数量根据实际系统的需求而定。
此模型将泵和作动筒的泄漏、摩擦等非线性因素考虑进去,加入液压附件(节流阀、单向阀、蓄能器)完善了EHA系统的漏油、补油特性。
设置旁通阀、溢流阀,在紧急情况下旁通作动筒,较好地保证系统的安全。
根据图2所示的EHA控制系统结构,在MATLAB/Simulink中建立控制器模型,如图4所示,其中包括信号采集及处理部分、SMC位置控制器、电机及其控制器、AMESim和MATLAB/Simulink的接口函数S-function。
反馈回来的速度信号和速度的微分信号需要输入到SMC控制器中,为了避免出现尖峰信号,在速度信号与微分信号进入控制器之前引入滤波器,对高频信号进行过滤。
根据可能出现的信号的最高频率,设计了一阶低通滤波器,滤波器传递函数为,使信号具有较好的稳定性。
将滑模变结构控制算法写成.m文件,通过S-fuction引入到控制系统中。
位置环采用滑模变结构控制,而电机的转速环和电流环由PID来控制。
电机控制器的主要目标是追求快速性,而不是转速的跟踪精度,因此可以适当地加大电机PID控制器的P值,提高电机的响应速度。
所研究的EHA系统的主要性能指标:电机供电电压:270 VDC;电机最高转速:10000 r/min;作动器行程:±40 mm;系统工作压力:28 MPa;系统最大流量:10 L/min。
仿真所用详细参数如表1所示。
EHA系统存在动作可靠,输出功率大的优点,但由于系统较为复杂,且存在较多的非线性因素,因此系统频响较低。
提高EHA系统的频响一直以来都是EHA研究的目标,对于推广其应用具有重要的意义。
将滑模变结构算法应用在EHA位置控制器中,将液压缸的位移误差信息转换为电机的给定转速,配合电机内部的转速环和电流环的PID控制,从而实现对液压缸位置的精确控制,旨在提高EHA的响应频率。
运用上述AMESim和MATLAB联合仿真模型,将表1中的参数代入进去,对其进行阶跃响应性能仿真。
设置仿真时间为10 s,在0 s时刻分别给系统施加一个幅值为15 mm的阶跃输入信号,在3 s时刻给系统施加一个幅值为10 kN 的负载力,仿真结果如图5所示。
从图5可以看出,采用滑模变结构控制策略能够很好地实现对EHA系统的控制,对比PID控制策略,二者的上升时间基本一致,这主要是受限于系统的最大流量;到达稳态后误差较小,在受到负载力之后产生微小偏差,但系统不存在突变或振荡,可见滑模变结构控制策略的刚度非常好,稳态精度也高。
采用PID控制的EHA响应频率较小,最多只能达到0.5 Hz,其响应曲线如图6所示。
采用滑模变结构控制对EHA联合仿真模型进行正弦响应性能仿真,设置仿真时间为5 s,在0 s时刻分别给系统施加一个幅值为4 mm,频率为0.5 Hz、1 Hz、2 Hz和3 Hz的正弦输入信号。
为验证系统的稳定性,在3 s时刻给系统施加一个幅值为10 kN的负载力,仿真结果如图7所示。
由图7可以看出,当采用滑模变结构控制策略时,EHA系统的频响最高可以达到2 Hz,3 Hz时由于存在流量饱和,其输出位移衰减为输入信号的50%左右。
但相比于图6,滑模变结构控制的EHA系统的跟踪效果和响应频率明显优于PID控制策略,起到了提高EHA系统频响的作用。
采用滑模变结构控制策略既能满足动静态性能,又可以保证系统的刚度和鲁棒性。
(1) 针对EHA位置控制环所设计的滑模变结构控制器设计合理,能使系统进入滑模面,实现液压缸位置控制;(2) 基于MATLAB/Simulink和AMESim建立的联合仿真模型是验证滑模变结构控制器在EHA中应用的有效手段,可以充分发挥两个软件的特点,有助于对系统性能的分析;(3) 滑模变结构控制策略应用于EHA的控制中,极大地提高了系统的响应频率,保证了系统的刚度和鲁棒性,是一种有效的控制方法。
【相关文献】[1] 齐海涛,付永领,郎燕.大型客机飞控作动系统配置方案设计[J].液压与气动,2014,(4):19-24,27. QI Haitao, FU Yongling, LANG Yan. Configuration Design of Flight Control Actuation Systems for Trunk Line Aircrafts[J]. Chinese Hydraulics & Pneumatics,2014,(4):19-24,27. [2] 王占林.近代电气液压伺服控制[M].北京:北京航空航天大学出版社,2005.WANG Zhanlin. Modern Electrical Hydraulic Servo Control [M]. Beijing: Beihang University Press,2005.[3] 刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.LIU Jinkun. The MATLAB Simulation of Sliding Mode Variable Structure Control[M]. Beijing: Tsinghua University Press,2005.[4] 刘金琨,孙富春.滑模变结构控制理论及其算法研究与进展[J].控制理论与应用,2007,24(3):407-418.LIU Jinkun, SUN Fuchun. Research and Development on Theory and Algorithms of Sliding Mode Control[J]. Control Theory & Applications,2007,24(3):407-418.[5] 穆效江,陈阳舟.滑模变结构控制理论研究综述[J].控制工程,2007,14(S1):1-5.MU Xiaojiang, CHEN Yangzhou. Overview of Sliding Mode Variable Structure control[J]. Control Engineering of China,2007,14(S1):1-5.[6] 纪铁铃,齐海涛,刘子龙.基于AMESim和MATLAB联合仿真的双变量电动静液作动器性能分析[J].液压与气动,2015,(5):51-57.JI Tieling, QI Haitao, LIU Zilong. Performance Analysis Based on AMESim and MATLAB Co-simulation for Dual-variable Electro-hydrostatic Actuator[J]. Chinese Hydraulics & Pneumatics,2015,(5):51-57.[7] FU Yongling, FAN Dianliang, QI Haitao, et al. The Application of Co-simulation Basedon AMESim and MATLAB in Electro-hydraulic Servo System[C]. Electronic and Mechanical Engineering and Information Technology (EMEIT), 2011 International Conference on. IEEE,2011,(7):3547-3550.[8] 齐海涛,付永领.基于AMESim的电动静液作动器的仿真分析[J].机床与液压,2007,35(3):184-186.QI Haitao, FU Yongling. Simulation of Electro-hydrostatic Actuator Based on AMESim[J]. Machine Tool & Hydraulics,2007,35(3):184-186.[9] 齐亮.基于滑模变结构方法的永磁同步电机控制问题研究及应用[D].上海:华东理工大学,2013. QI Liang. Research and Application of Permanent Magnet Synchronous Motor Via Sliding Mode Control Methods[D]. Shanghai: East China University of Science and Technology,2013.[10] 靳宝全.电液位置伺服控制系统的模糊滑模控制方法研究[D].太原:太原理工大学,2010.JIN Baoquan. Study on the Fuzzy Sliding Mode Control Method of Electro-hydraulic Position Servo Control System[D]. Taiyuan: Taiyuan University of Technology,2013. [11] 徐艳翠.四足机器人液压驱动单元模糊滑模变结构控制研究[D].秦皇岛:燕山大学,2013.XU Yancui. Study on the Fuzzy Sliding Mode Control of the Hydraulic Driving Unit of Quadruped Robot[D]. Qinhuangdao: Yanshan University, 2013.[12] SUN Zhonghong, DENG Yigao, WANG Xinyu, et al. Research on the Steady Precision of Sliding Mode Control of a Class of Nonlinear Systems[C]. The Sixth World Congress on Intelligent Control and Automation(WCICA), IEEE,2006,(1):1039-1043.[13] Wai R J. Adaptive Sliding-mode Control for Induction Servomotor Drive[C].IEE Proceedings-Electric Power Applications,2000,147(6):553-562.。