汽车电动助力转向系统控制策略及仿真研究
汽车电动助力转向系统的控制策略分析

汽车电动助力转向系统的控制策略分析陈军明(郑州宇通客车股份有限公司,郑州 450000)摘 要:汽车转向为汽车行业各项性能中的重要组成部分,电动助力转向技术属于其他类别的新兴技术,动力转向模式区别于传统电力的工作原理,其主要是通过电子控制系统的具体操作单元,电子控制系统传感器主要以采集信号控制功率的电机运行,从而辅助汽车在转向方面的功能实现。
总之,汽车电动助力转向系统是目前电子控制技术研究中的一项重要领域,应对其相关软件控制器进行合理设计,使系统基本助力特性得到有效调整,从而使驾驶要求得到有效提升。
关键词:汽车技术;电动助力转向;系统控制0 引言 交通工具的使用和发展人类社会在任何时代都具有技术提前性,汽车出现后,成为了陆地上的交通工具,有不可替代的作用在。
现代社会人们逐渐增强汽车的功能指标要求,同时在细节层面的优化发展的关键点之一。
操作汽车时,转向在驾驶的过程中是必不可少的步骤,除了司机需要按照操作标准进行设备调整,在汽车内部零件和设备系统的优化,科技水平也在不断上升,从传统转向系统液压制动转变为今天已经开始使用电动助力转向,这是一个技术的飞跃,同时,是汽车应用领域的一个巨大进步。
其改变了过去机械传动在实际运行中故障率高的问题,该技术的具体发展与汽车行业综合技术水平的提高密切相关。
1 汽车电动助力转向系统的概述 汽车电动助力转向系统的基本结构和位置各不相同,主要包括转向轴动力结构、齿轮动力结构和齿条动力结构。
虽然位置上有一定差异,但基本工作原理是相似的,其中最典型的是转向轴动力结构。
结构主要取决于输入轴和输出轴的力量,通过基本驱动机制来指导整个方向盘转向杆,也可以确保司机在现实操作过程中,通过输入角位移,速度传感器的对车速进行有效测试,确保传输操作信号及电子控制单元(ECU)的实现有效采集、从而确定电子控制单元(ECU)的功率大小和方向值,可以得出与之相对应的输出转矩功率,可以指导驱动电路的控制信号,以促进整体转向轴电压和电流对动力转向功能基本电机输出转矩的实现过程中的整体实时控制。
汽车电动助力转向系统的建模与仿真
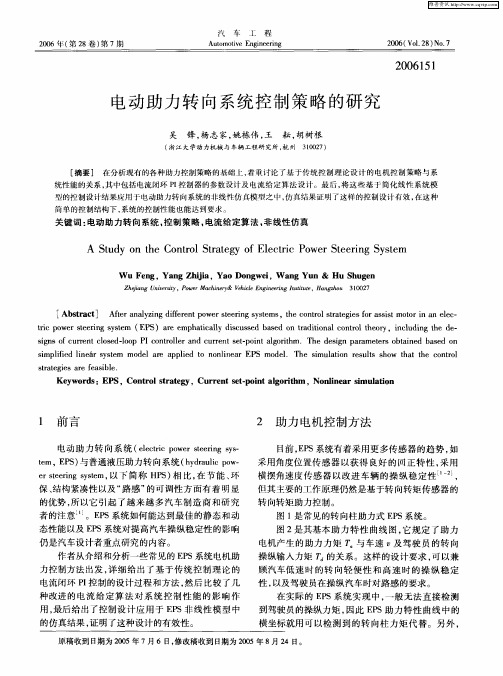
图2- 1 转向轴助力式 EPS 的简化模型
Fig. 2 - 1 Steering shaft power assisted EPS simplified model
图中 :θ, X , J , b , K , T , J , N , G 分别代表各部件 的角位移 , 位移 , 转动惯量 , 粘性阻尼系数 , 刚度 , 扭 矩 ,齿条到转向轮的传动比 ,减速比等 拉格朗日动力学方程的一般形式 ,如式 ( 2 - 1) : d 5L 5L = Qi d t 5 qi 5 qi ( 2 21) i = 1 , 2 , …, n 对于转向轴助力式 EPS , 选择电机轴角位移 θ m ,转向轮角位移 δ和齿条平移位移 X r 三个参数为 系统的自由度 ; 作用在θ m 上的广义力是助力电机输 δ 出扭矩 T m ,作用在 上的外部力为回正力矩 M z ( 转 换到主销上) 。 系统的动能和势能分别为 :
吴亦君 ( 上海大众汽车有限公司 , 上海 210000) W U Yi2j un
( S han g hai D az hon g Co. , S han g hai 210000 , Chi na)
[ 摘要 ] 本文分析了动力转向系统的发展概况和国内外研究及应用水平 , 建立了电动助力转向系统的数学模
型 ,利用有关软件进行计算机仿真分析并与试验结果相比较 ,验证了模型的正确性 。
[ Abstract] This paper summarizes t he develop ment of power steering system , and analyzes t he current sit ua2 tio n of t he research and applicatio n of t his new technology bot h at ho me and abroad. Al so in t his paper , a mat hematical model of EPS system will be co nst ructed , and t hen analyzed by means of co mp uter simula2 tio n , where certain soft ware will be int roduced. Finally , t he p recisio n of t his model is to be co nfirmed by co mparing t he t heoretical analysis result wit h t he data acquired f ro m p ractical test s and experiment s.
汽车电动转向器动力学建模与控制仿真分析
摘要汽车电动转向器是一种新型的汽车转向助力系统。
文章先对EPS系统原理及结构进行说明,介绍了三种EPS典型助力曲线,建立了机械转向系统数学模型、EPS系统数学模型,文中提出了EPS系统控制目标,说明了EPS系统的PID控制策略,介绍了电动助力转向系统中的三种控制模式:助力控制模式,回正控制模式,阻尼控制模式,文章重点研究助力控制。
并建立了机械转向系统、EPS系统和基于PID控制的系统三种数学模型,然后应用MATLAB的Simulink模块进行运动仿真,通过调整参数和分析参数,来研究系统稳定性随参数变化的影响。
仿真结果表明,所设计的PID 控制对能对转向系统模型进提供助力控制,同时能使系统满足很好的动态性能。
关键词:电动转向器;助力控制;MA TLAB/Simulink;仿真AbstractElectric Power Steering is a new automotive power steering system.This article first on the principle and structure of EPS system are described, three kinds of typical EPS power curve is introduced in this paper, the mathematical model of the system, the EPS system mathematical model of the pure mechanical steering system is established in this paper, the target control of EPS system, the control strategy of EPS system of PID, this paper introduces three kinds of control mode of electric power steering in: power control mode, return control mode, the damping control mode, this paper focuses on the study of power control. Under pure mechanical steering system, EPS system and PID power control of EPS system based on the mathematical model, the application of MA TLAB/Simulink simulation, parameters, and analysis of influence parameters on the stability of the system, and the use of PID control strategy for power control of the model, and that the system can meet the dynamic performance is very good.Key words: electric power steering ; assist control ; MA TLAB/Simulink; simulationII目录摘要 (I)Abstract (II)目录 (V)1 绪论 (1)1.1 本课题的研究背景和意义 (1)1.2 国内外的发展概况 (1)1.3 本课题应达到的要求 (2)2 电动转向系统的动力学模型 (3)2.1 电动转向系统的结构和工作原理 (3)2.2EPS典型助力曲线 (5)2.3 EPS动力学的模型 (7)2.3.1 机械转向系统数学模型 (7)2.3.2 EPS系统的模型 (8)2.4 EPS稳定性与转向助力增益分析 (10)2.4.1 转向助力增益的确定 (10)2.4.2 EPS稳定性与转向助力增益关系 (11)3 EPS系统控制分析 (16)3.1系统控制的目标 (16)3.2 EPS系统的控制策略 (16)3.3 系统的控制模式 (17)3.4 系统的补偿控制 (18)3.4.1 补偿控制原理 (18)3.4.2 补偿控制的作用 (18)4 EPS系统的仿真与分析 (19)4.1 MATLAB/Simulink仿真平台的介绍 (19)4.2 系统仿真参数取值 (19)4.3 机械转向系统仿真与研究 (20)4.3.1 机械转向系统的Simulink模型 (20)4.3.2 汽车机械转向系统在阶跃输入时不同参数下的仿真研究 (22)4.3.3 不同参数对系统性能影响的仿真分析 (28)4.4 EPS转向系统仿真与研究 (28)4.4.1 EPS系统的Simulink模型 (28)4.4.2 EPS系统加入PID控制的Simulink模型 (30)4.4.3 EPS系统加入PID控制的仿真与分析 (32)4.5 不同系统的比较仿真与分析 (36)5 结论与展望 (40)5.1 主要结论 (40)5.2 不足之处及未来展望 (40)致谢 (41)参考文献 (41)附录 (42)汽车电动转向器动力学建模与控制仿真研究1 绪论1.1 本课题的研究背景和意义目前汽车已经走入寻常百姓家中,人们对汽车需求逐渐增大。
电动助力转向系统的PID控制及仿真研究
0 引 言
电动助力 转 向系统 ( P ) 表 着未 来动 力转 向 E S代
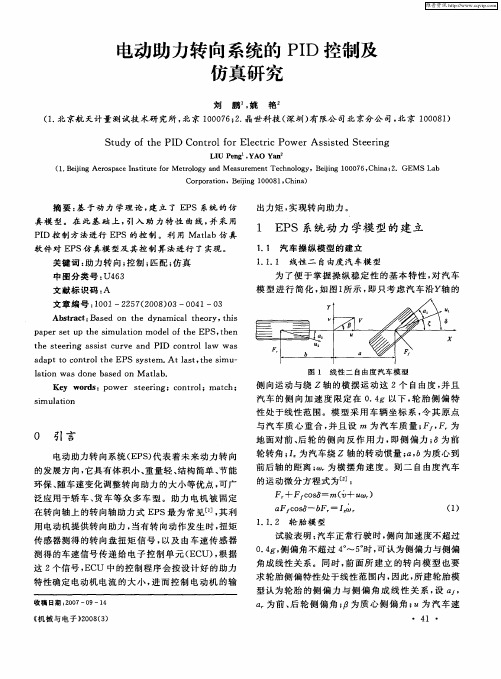
地 面对 前 、 轮 的侧 向反 作 用 力 , 后 即侧 偏力 ; 为 前 轮转角 ; I 为汽 车绕 Z轴 的转 动惯 量 ; , 为质 心 到 口b 前 后 轴 的距 离 ;, 横摆 角 速 度 。则二 自由度 汽 车 t为 o 的运 动微分 方程 式为 [ : 2 ]
Fr Ffo d r ( + uo) + cs= n v  ̄
的发展 方 向 , 它具有 体积 小 、 量轻 、 重 结构 简单 、 节能
环保、 随车速 变化调 整转 向助力 的大小等 优点 , 可广
泛 应 用于轿 车 、 车 等众 多 车型 。助力 电机 被 固定 货
在转 向轴上 的转 向轴助 力式 E S最为 常 见[ , 利 P 】其 ] 用 电动机提供 转 向助力 , 当有 转 向动作 发生 时 , 扭矩
出力矩 , 现转 向助力 。 实
1 E S系统动 力 学模 型 的 建 立 P
1 1 汽 车 操 纵 模 型 的 建 立 .
软件 对 E S仿 真模 型及其控 制 算法进 行 了实现 。 P
关键词 : 助力转 向; 控制 ; 配 ; 匹 仿真 中 图分 类号 : 6 U4 3
文献标 识码 : A 文 章 编 号 : 0 1—2 5 ( O 8 O 10 2 7 2 O ) 3—0 4 0 1一O 3
sm l a i n i 】 to 】
图 1 线 性 二 自 由 度 汽 车 模 型
侧 向运动 与绕 Z轴 的横摆 运 动这 2个 自由度 , 且 并 汽 车 的侧 向加 速 度 限定 在 0 4 以下 , 胎 侧 偏 特 .g 轮
性 处 于线 性范 围。模 型 采用 车 辆 坐标 系 , 其 原 点 令 与汽 车 质 心 重 合 , 且 设 m 为 汽 车质 量 ; , , 并 F, F 为
试论汽车电动助力转向系统的控制策略

FRONTIER DISCUSSION | 前沿探讨试论汽车电动助力转向系统的控制策略李杨四川信息职业技术学院 四川省广元市 628000摘 要:目前汽车行业内对电动助力转向技术的应用属于新兴技术类别的范畴,区别于传统的助力转向模式,电动助力的工作原理是通过电子控制系统的具体操作单元,以传感器采集信号同时控制助力工作的电动机产生运转,辅助车辆在转向方面的功能实现。
以EPS结构圈地传统的液压助力转向能够避免车辆制造以及使用过程中的故障率问题,同时使专项活动更加轻便,目前已经成为了汽车行业加工制造的重要技术之一,对这一技术课题进行研讨有利于汽车行业在未来提升制造技术可选择性。
关键词:汽车技术;电动助力转向;系统控制1 引言人类社会对交通工具的运用以及发展在任何时代都具有技术前提性,而汽车自出现起,就已经成为了陆地代步交通工具中的佼佼者,到了现代社会更是有着不可替代的作用,人们对汽车的功能指标要求逐渐提升的同时,在细节层面的优化也是汽车发展的关键点之一。
而对于汽车操作,转向是任何驾驶过程中必不可少的操作步骤,除了驾驶员需要按照操作标准进行设备的调整之外,在汽车内部零件以及设备系统的优化上,科技水平也在不断上升,转向系统从传统的液压制动到了今天已经开始采用电动助力转向,这是技术上的飞跃,同时也是汽车实用性领域上的一个巨大提升。
改变了以往机械传动在实际操作中的故障率较高的问题,而这一技术的具体发展脉络与汽车行业的综合技术水准提升有着密切关系。
2 电动助力转向系统的实际作用方式探析电力技术的飞速发展使电子工程在各工业领域应用效率都在逐渐提升,而电动助力系统的使用在汽车行业也成为了新兴技术之一,在国内外的多款品牌车型中都有所应用,其具体的作用方式是通过电子控制系统对汽车电动机的操作,为转向动作提供足够的辅助动力,使转向系统正常运作,相比人力进行驱动,具有更加轻便的特点。
在其中主要使用的是模糊控制的概念,能够通过非线性控制的算法将复杂的驾驶情况进行统合处理,在汽车实际驾驶中能够取得良好的应用效果[1]。
汽车电动助力转向系统控制策略及仿真研究
汽车电动助力转向系统控制策略及仿真研究首先,本文介绍了汽车电动助力转向系统的原理和结构。
汽车电动助力转向系统由电动电机、转向机构和控制单元组成。
电动电机通过转向机构与汽车的转向轴相连接,当驾驶者转动方向盘时,电动电机会提供相应的力量辅助转向。
接下来,本文提出了一种基于PID控制的汽车电动助力转向系统控制策略。
PID控制是一种经典的控制方法,通过不断调节比例、积分和微分三个控制参数,使得系统的输出能够稳定地跟踪期望的轨迹。
在汽车电动助力转向系统中,PID控制可以通过测量转向轴的角度和驾驶者的方向盘输入来自动计算出合适的转向力量,以达到准确转向的目的。
为了验证PID控制策略的有效性,本文利用Simulink工具进行了仿真实验。
仿真实验采用了真实的汽车转向系统参数,通过输入不同的方向盘转动信号,模拟不同的转向操作。
实验结果表明,基于PID控制的汽车电动助力转向系统能够准确地跟踪方向盘输入,并提供适当的转向力量,实现稳定的转向。
最后,本文总结了汽车电动助力转向系统控制策略及仿真研究的主要结果和贡献。
通过研究和仿真实验,本文验证了基于PID控制的汽车电动助力转向系统的有效性和稳定性。
这一研究为汽车电动助力转向系统的设计和控制提供了一定的参考和借鉴。
综上所述,本文对汽车电动助力转向系统的控制策略进行了研究,并进行了相关的仿真实验。
本文的研究结果表明,基于PID控制的汽车电动助力转向系统能够实现准确转向,并具有稳定性和可靠性,为汽车驾驶员提供了良好的转向体验。
但是,仍然有一些问题和挑战需要进一步研究和解决,比如如何提高转向系统的响应速度和抗干扰能力。
对于未来的研究,可以考虑将其他的控制方法应用到汽车电动助力转向系统中,并进一步优化转向系统的性能。
电动助力转向系统控制策略的研究
smp iid ln h y t m mo e r a p i d t n n ie r EPS mo e . Th smu ai n e u t h w h t h o to i lfe i e r s se d l a e p le o o ln a d1 e i lto r s ls s o t a te c n r l sr tg e r e sb e. ta e is a e f a il Ke wor y ds:EPS,Co r lsr t g nt o t a e y,Cu r nts t p i l ort r e e — o nta g ihm ,No i ar sm u a i nl ne i l ton
型的控制没计结果应用 于电动助力转 向系统的非线性仿 真模 型之 中 , 仿真结果证 叫了这样 的控制设计有 效 , 在这 种 简单的控制结构下 , 系统的控制性能也能达 到要求 。
关键 词 : 电动 助 力转 向 系统 , 制策 略 , 控 电流 给 定算法 , 线性 仿真 非 A td n t e Co to tae y o e ti o rS e rn y tm S u y o h n rlS rt g fElcrc P we t ei g S se
sg s o u r n l s d lo I c n r l ra d c re ts tp i ta g rt m . Th e in p r m ee s o an d b s d o in fc re tc o e -o p P o to l n u n e - o n lo h e i e d sg a a t r bti e a e n
Wu F n , n hj ,Y oD n w i W a gYu e g Ya gZ ia a o g e, i n n& HuS u e h g n
电动助力转向系统的建模与仿真分析

电动助力转向系统的建模与仿真分析[摘要] 在建立电动助力转向系统的数学模型和状态空间模型的基础上,对系统进行稳定性分析,并对系统模型进行仿真分析,分析电动助力转向系统的转向动态特性和路面干扰对于转向系统的影响,进而提出电动助力转向系统的阻尼控制方法。
关键词: 汽车电动助力转向状态空间仿真1 概述由于动力转向系统具有转向操纵轻便、灵活,汽车设计时对转向器结构形式选择的灵活性增大,同时可以吸收路面对轮胎产生的冲击等优点,自20 世纪50 年代以来,在国外汽车上得到采用。
但是,传统的液压动力转向系统在汽车行驶的时候需要消耗一定的能量,同时,它增加了液压油泵、液压缸、油管和一些辅助装置,还存在液压油的泄漏问题,对环境造成一定的危害。
随着电子控制技术的发展,电子控制液压动力转向系统应运而生,该系统的某些性能要优于传统的液压动力转向系统,但它仍然无法克服液压动力转向系统的某些固有的缺陷。
电子控制电动助力转向系统属于另一种形式的动力转向系统,该系统根据汽车的转向状态,通过电子控制单元控制电动机直接驱动转向机构,使汽车的转向轮发生偏转。
该系统不直接利用发动机动力,只有在需要转向的时候才由电动机提供动力,不转向的时候不消耗能量。
电动机使用的动力来自于蓄电池,省去了液压油泵、液压缸、油管等装置,结构紧凑,重量轻。
另外,该系统可以通过软件的方法实现汽车在不同车速下获得不同的静态助力特性,提高驾驶员转向时的路感。
2 系统数学模型的建立电动助力转向系统结构如图1 所示,主要包括转向柱、减速机构、齿轮齿条和助力电动机,以及ECU控制单元,这里建立的转向系统动力学方程为:转向柱: (1)输出轴:(2)齿条:(3)电动机:(4)式中s J 为转向柱、转向盘的转动惯量,s B 为转向柱的阻尼系数,s K 为扭杆的刚性系数,s q 为转向柱的旋转角,h T 为作用在转向盘上的转向扭矩,e J 为减速机构的转动惯量,e B 为减速机构的阻尼系数,e q 为输出轴的旋转角,G 为蜗轮蜗杆减速器的减速比,w T 为作用在输出轴上的反作用扭矩,r m 为小齿轮及齿条质量,r b 为齿条的阻尼系数,r K 为等效弹簧的弹性系数,r x 为齿条的位移, d F 是路面的随机信号,m I 是电枢电流,m B 是电动机粘性摩擦系数,m K 为电动机和减速机构的刚性系数,m J 是电动机惯性矩,m q 是电动机转角,p r 为小齿轮半径。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车电动助力转向系统控制策略及仿真研究
汽车电动助力转向系统控制策略及仿真研究
摘要:随着汽车电动助力转向系统的应用越来越广泛,对其控制策略的研究也变得越来越重要。
本文基于对汽车电动助力转向系统的分析,提出了一种基于滑模控制的控制策略,并进行了仿真研究。
通过与传统的PID控制策略进行对比,结果表明本文提出的滑模控制策略具有更好的控制性能和鲁棒性。
1. 引言
汽车电动助力转向系统可以通过电动助力提供额外的转向力,使得驾驶更加轻松灵活。
为了在不同驾驶条件下实现良好的转向性能,需要采用合适的控制策略来调节电动助力转向系统。
2. 汽车电动助力转向系统建模
2.1 汽车动力学模型
在建模之前,首先要了解汽车的动力学模型,包括车辆质量、惯性矩、悬挂刚度等。
本文假设汽车为四轮驱动、四轮转向的车辆,采用简化的二自由度车辆模型。
2.2 电动助力转向系统模型
电动助力转向系统包括电动助力转向机构、电机控制器和传感器等。
本文建立了电动助力转向系统的数学模型,并考虑了其非线性特性。
3. 控制策略设计
基于以上的汽车电动助力转向系统模型,本文提出了一种基于滑模控制的控制策略。
滑模控制是一种常用的非线性控制方法,具有较好的鲁棒性和快速响应特性。
本文设计了滑模控制器,并通过仿真验证了其控制性能。
4. 仿真实验与结果分析
通过Matlab/Simulink软件进行仿真实验,并与传统的PID控制策略进行对比。
结果表明,基于滑模控制的电动助力转向系统具有更好的响应速度和稳定性。
在不同的驾驶工况下,滑模控制策略能够有效改善转向性能。
5. 结论
本文通过对汽车电动助力转向系统的控制策略进行研究和仿真,提出了一种基于滑模控制的策略,并与PID控制策略进行对比。
结果表明,滑模控制策略能够有效改善转向性能,具有较好的控制性能和鲁棒性。
未来,还可以进一步研究优化该控制策略,提高汽车电动助力转向系统的性能
通过对汽车电动助力转向系统的研究和仿真实验,本文提出了一种基于滑模控制的控制策略。
与传统的PID控制策略相比,滑模控制策略在不同驾驶工况下都能够有效改善转向性能,具有更好的响应速度和稳定性。
同时,滑模控制具有较好的鲁棒性和快速响应特性,能够应对系统非线性特性。
未来,可以进一步优化该控制策略,提高汽车电动助力转向系统的性能。
总而言之,本文的研究为汽车电动助力转向系统的控制提供了有益的参考,为提升驾驶安全性和操控性能具有一定的实用价值。