基于趋近律的滑模控制matlab仿真实例
滑模理论及其控制实例
.
定义
滑模控制在本质上是一种非线性控制方法,它的非线性表现在 控制的不连续性上,基于滑模控制理论设计的控制器,其“结构” 是不固定的,且在控制过程中将根据系统当前状态不断变化,以达 到驱使系统按照预定的“滑动模态”状态轨迹运动的目的。
考虑一个一般的非线性系统:
x & fx ,u ,t x R n u R m ,t R
5)什么条件下可以确保滑动模态运动的存在以及系统在进入滑动模态运动 以后能具有良好的动态特性如渐近稳定等,是变结构控制理论所要研究 的主要问题。
.
性质 滑模变结构控制三要素:存在性、可达性、稳定性 (1) 满足可达性条件,即在切换面以外的运动点都将在有限时间内到达切换面; (2) 滑动模态存在性; (3) 保证滑动模态运动的渐近稳定性并具有良好的动态品质
滑模变结构控制本质上是一种特殊的非线性控制其最大特点在于结构不固定可以根据系统当前的状态不断切换控制量使得系统状态到达滑动模态后沿着预先设定的滑模面运动到平衡点且系统性能完全由滑模面决定而与被控对象参数和扰动无关该控制方法的大优点是能够克服系统的不确定性对系统参数变化外部干扰和未建模动态具有很强的鲁棒性在机器人航空航天电力系统伺服系统等领域得到了广泛应用
.
滑模控制抖振问题
抖振问题产生的原因(只能减轻,无法消除):
1. 时间滞后开关(控制作用对状态准确变化有滞后) 2. 空间滞后开关(状态空间中的状态量变化死区) 3. 系统惯性的影响 4. 离散时间系统本身造成的抖振
抖振问题的削弱方法: 1. 准滑动模态方法(系统运动轨迹被限制在边界层) 2. 趋近律方法(保证动态品质、减弱控制信号抖振) 3. 观测器方法(补偿不确定项和外界干扰) 4. 动态滑模方法 5. 智能控制方法
基于AMESim和MATLAB联合仿真的EHA滑模变结构控制分析

基于AMESim和MATLAB联合仿真的EHA滑模变结构控制分析纪铁铃;齐海涛;滕雅婷【摘要】分析了电动静液作动器(EHA,Electro-Hydrostatic Actuator)系统的结构组成与工作原理,建立了其数学模型,将滑模变结构控制用于控制EHA的位置环,建立了包含滑模变结构位置控制环、PI转速控制环、PI电流控制环的EHA控制器结构,并设计了滑模变结构控制器.最后使用AMESim和MATLAB软件建立了EHA 机械、液压部分的模型和电机、控制器的模型,进行联合仿真,并对仿真结果进行分析.仿真结果表明,滑模变结构用于控制EHA是可行的,并且可以提高系统的频响,使系统获得较大的刚度和较好的稳态精度.【期刊名称】《液压与气动》【年(卷),期】2016(000)003【总页数】6页(P19-24)【关键词】滑模变结构;EHA;AMESim;MATLAB;联合仿真【作者】纪铁铃;齐海涛;滕雅婷【作者单位】北京航空航天大学工程训练中心,北京100191;北京航空航天大学工程训练中心,北京100191;北京航空航天大学机械工程及自动化学院,北京100191【正文语种】中文【中图分类】TH137;V227引言功率电传(PBW,Power-By-Wire)作动器是未来多/全电飞机的关键技术,电动静液作动器(EHA)是功率电传作动器的主要形式,但由于EHA系统存在非线性和参数摄动,用简单的 PID 控制不能满足鲁棒性要求[1,2]。
滑模变结构控制中滑模动态的不变性使被控对象对非线性因素引起的系统不确定性具有理想的鲁棒性。
常规的控制系统通常采用连续性控制,而滑模变结构控制系统的“结构”是一种呈现开关特性的非连续性控制,这种开关特性与时间变化相关。
一般所说的“滑动模态”运动是指在系统的上述开关特性作用下按照预定状态轨迹进行高频小幅的上下运动[3~5]。
将滑模变结构控制应用于EHA控制中,将极大地弥补非线性因素对EHA 系统性能的影响,提升系统的鲁棒性,达到较好的稳态精度。
基于自适应趋近律的三维最优滑模制导律设计
律 的基础 提 出一种新 的 自适 应趋 近 律 , 能够 克 服 幂
21 0 0年 1 2月 2 日收 到
) x |
平面
第一作 者简介 : 玉彬 (9 4 ) 男 , 吴 18 一 , 汉族 , 山西稷 山人 , 硕士 研究 生, 研究方 向: 导航、 制导与控制 。
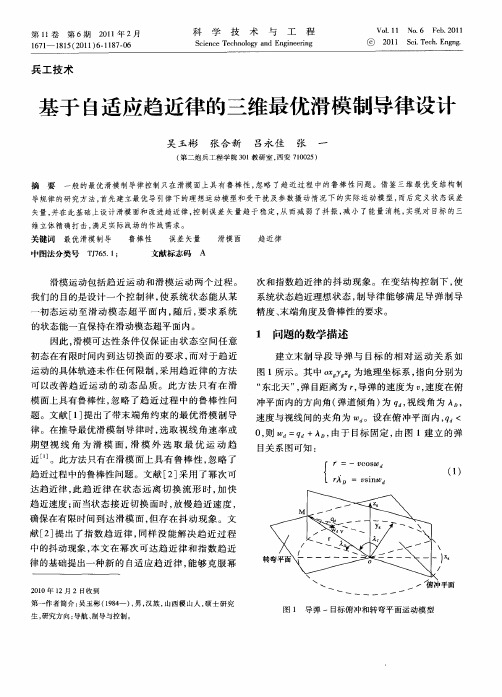
图 1 导弹 一目标俯冲和转弯平面运动模 型
一
系统状 态趋 近理想 状 态 , 导 律 能够 满 足 导 弹制 导 制 精度 、 端角 度及鲁 棒性 的要求 。 末
初态运 动 至 滑 动 模 态 超 平 面 内 , 后 , 求 系 统 随 要 因此 , 滑模 可 达性 条 件 仅保 证 由状 态 空 间任 意
的状态 能一 直保持在 滑动 模态 超平 面 内。
期望 视 线 角 为 滑 模 面 , 模 外 选 取 最 优 运 动 趋 滑
近 ¨ 。此 方法 只有 在滑 模 面上 具 有 鲁 棒性 , 略 了 忽
趋近过 程 中的鲁棒 性 问题 。文献 [ ] 用 了幂 次可 2采
达趋近 律 , 此趋 近 律 在 状 态 远 离 切 换 流形 时 , 快 加
关键词
最优滑模 制导 T7 5 1 J6 . ;
鲁棒 性
误差 矢量 A
滑模 面
趋近律
中图法分类号
文献标志码
滑 模运 动包 括趋 近 运 动 和滑 模 运 动 两个 过 程 。
次 和指 数趋 近律 的抖 动现 象 。在 变 结 构 控制 下 , 使
我们 的 目的是设 计 一 个控 制 律 , 系 统 状 态 能从 某 使
初 态在有 限 时间 内到 达切 换 面 的要 求 , 而对 于趋 近
1 问题 的数学描述
准滑动模态控制matlab仿真实例资料

准滑动模态控制2.8.1准滑动模态控制在滑动模态控制系统中,如果控制结构的切换具有理想的开关特性,则能在切换面上形成理想的滑动模态,这是一种光滑的运动,渐进趋近于原点。
但在实际工程中,由于存在时间上的延迟和空间上的滞后等原因,使得滑动模态呈抖振形式,在光滑的滑动上叠加了抖振。
理想的滑动模态是不存在的,现实中的滑动模态控制均伴随有抖振,抖振问题是影响滑动模态看控制广泛应用的主要障碍。
所谓准滑动模态,是指系统的运动轨迹被限制在理想滑动模态的某一∆领域内的模态。
从相轨迹方面来说,具有理想滑动模态的控制是使一定范围内的状态点均被吸引至切换面。
而准滑动模态控制则是使一定范围内的状态点均被吸引至切换面的某一∆领域内,通常称此∆领域为滑动模态切换面的边界层。
在边界层内,准滑动模态不要求满足滑动模态的存在条件,因此准滑动模态不要求在切换面上进行控制结构的切换。
它可以在边界层上进行结构变换的控制系统,也可以根本不进行结构变换的连续状态反馈控制系统。
准滑动模态控制在实现上的这种差别,使它从根本上避免或削弱了抖振,从而在实际中得到了广泛的应用。
在连续系统中,常用的准滑动模态控制有以下两种方法: (1) 用饱和函数()sat s 代替理想滑动模态中的符号函数sgn()s 。
1()1s sat s ks s s >∆⎧⎪=≤∆⎨⎪-<-∆⎩1k =∆ (2.46)其中∆称为“边界层”。
饱和函数()sat s 如图2-26所示,饱和函数的本质为:在边界层外,采用切换控制;在边界之内,采用线性化反馈控制。
(2) 将继电特性连续化,用连续函数()s θ取代sgn()s 。
()ss s θδ=+ (2.47)式中δ是很小的正常数。
2.8.2 仿真实例对象为二阶传递函数:2()p bG s s as=+其中25,133a b ==。
将传递函数描述为位置状态方程的形式:.x x u =A +B其中010a ⎡⎤A =⎢⎥-⎣⎦, 0b ⎡⎤B =⎢⎥⎣⎦。
基于新型趋近律的潜艇垂直面滑模控制仿真
但对参数摄动和扰动鲁棒性较差,尤其是难以处理复 杂非线性问题[1]。针对非线性系统的控制问题,多名 学者进行了深入研究[2 – 3],但控制器结构复杂,难以实 现。而通过模糊方法设计非线性鲁棒补偿器,一定程 度上可以简化控制器的复杂度[4]。近年来,滑模控制 (SMC,sliding mode control)对满足匹配条件的任意 摄动和外界干扰具有较强鲁棒性,且其算法简单、响 应快速、易于工程实现,受到广泛关注[5 – 10]。传统的 滑模控制方法采用极点配置法、最优控制等方法设计 线性切换函数,利用基于边界层方法的准滑模控制降 低抖振,设计潜艇垂直面准滑模控制器。潜艇垂直面
关键词:潜艇;滑模控制;鲁棒性;趋近律;状态观测器
中图分类649(2019)03 – 0055 – 07
doi:10.3404/j.issn.1672 – 7649.2019.03.011
Research and simulation of vertical plane of submarine based on sliding control based on a new reaching law
第 41 卷 第 3 期 2019 年 3 月
舰船科学技术 SHIP SCIENCE AND TECHNOLOGY
Vol. 41, No. 3 Mar. , 2019
基于新型趋近律的潜艇垂直面滑模控制仿真
陆斌杰,李文魁,周 岗,陈永冰 (海军工程大学 电气工程学院,湖北 武汉 430033)
摘 要: 针对潜艇垂直面运动强非线性、耦合性和参数不确定的特点,为更好地实现对潜艇垂直面运动的控 制,在 Matlab 环境下,基于垂直面线性操纵运动模型,考虑舵的动态响应,用首舵控制深度,尾舵控制纵倾角,采 用新型趋近律设计滑模控制器并设计了基本的全维状态观测器;同时设计了常规的 PID 控制器并选取了最佳的 PID 控制参数,分别在 3 种情况下对 2 种控制器控制下的潜艇垂直面运动进行对比仿真。仿真结果表明,滑模控制 器比 PID 控制器具有更好的控制性能和较强的鲁棒性,对实际潜艇的垂直面运动控制有一定的指导意义。
滑模控制原理matlab程序
一、概述滑模控制是一种能够有效应对参数变化和外部干扰的控制方法,其原理是通过引入滑动模式,在滑动面上保持系统状态以抑制干扰和变化。
在实际工程中,滑模控制由于其优越的性能和鲁棒性,在许多领域得到了广泛的应用。
本文将探讨滑模控制的原理以及如何利用Matlab编程实现滑模控制。
二、滑模控制的原理滑模控制的核心思想是通过引入滑模面,将系统状态限制在该面上,从而使系统能够快速、稳定地达到期望状态,并能够抵抗外部干扰和参数变化。
滑模控制的设计基于Lyapunov稳定性理论,在这种控制策略下,系统状态会迅速收敛到滑模面上,并在该面上保持稳定。
滑模控制的设计和实现通常包括以下步骤:1. 确定系统模型和状态空间表示。
这一步需要对待控制的系统进行建模,并将其表示为状态空间形式,以便后续控制器设计和分析。
2. 设计滑模面和滑模控制规则。
根据系统模型和性能指标,确定滑模面的设计思路和控制规则。
3. 分析系统的稳定性和鲁棒性。
利用Lyapunov稳定性理论等分析方法,分析设计的滑模控制策略在系统稳定性和鲁棒性方面的性能。
4. 仿真验证和调试。
利用Matlab等仿真软件进行滑模控制器的设计和调试,验证设计的控制策略在仿真环境下的性能。
三、Matlab程序实现滑模控制在Matlab中实现滑模控制通常涉及到以下几个方面的内容:1. 状态空间模型表示首先需要将待控制的系统模型表示为状态空间形式,通常可以利用Matlab中的state-space函数来进行。
对于一个一阶线性系统,可以使用以下代码来表示其状态方程:```A = [0 1; -1 -1];B = [0; 1];C = [1 0];D = 0;sys = ss(A, B, C, D);```2. 滑模面设计和控制规则利用Matlab进行滑模面设计和控制规则的制定通常涉及到一些数学运算和符号计算。
针对一个二阶系统,可以利用Matlab的符号计算工具箱来求解滑模面的方程和控制规则的设计。
滑模变结构控制matlab仿真
滑模变结构控制matlab仿真滑模变结构控制(Sliding Mode Variable Structure Control,SMC)是一种应用广泛的控制方法,其在工程领域中有着重要的应用价值。
本文将以MATLAB仿真为基础,介绍滑模变结构控制的原理以及在控制系统中的应用。
滑模变结构控制是一种非线性控制方法,其核心思想是通过引入滑模面来实现系统的稳定和鲁棒性。
滑模面是一个高频振荡的超平面,通过控制系统的输出使得系统状态在滑模面上运动,从而实现对系统的控制。
滑模变结构控制具有很强的鲁棒性,对于参数扰动、外部干扰等都有很好的抑制能力。
在MATLAB中进行滑模变结构控制的仿真实验可以帮助我们更好地理解该控制方法的原理和特点。
首先,我们需要建立一个控制系统的数学模型,在MATLAB中进行仿真。
然后,根据系统模型设计滑模面和滑模控制律,并将其应用于控制系统中。
最后,通过MATLAB的仿真环境,观察控制系统的响应和性能指标。
在滑模变结构控制的仿真实验中,我们需要注意以下几个方面。
首先,选择合适的系统模型,可以是线性模型或非线性模型。
其次,需要确定滑模面的设计方法,例如采用单纯滑模面、多项式滑模面或者自适应滑模面。
滑模面的设计直接关系到控制系统的性能和稳定性。
然后,需要设计滑模控制律,即根据滑模面的设计方法确定控制系统的控制策略。
最后,通过MATLAB的仿真工具进行系统仿真,并观察系统的响应和性能指标。
滑模变结构控制在实际工程中有着广泛的应用。
例如在机器人控制、飞行器控制、电力系统控制等领域都有着重要的应用价值。
滑模变结构控制具有很强的鲁棒性和适应性,对于参数扰动和外部干扰有很好的抑制能力,因此在复杂环境下仍然能够保持系统的稳定性。
在滑模变结构控制的仿真实验中,我们可以通过改变系统模型、滑模面的设计方法和滑模控制律等参数,来观察不同参数对系统性能的影响。
通过仿真实验,可以得到系统的响应曲线、稳定性分析、收敛速度等性能指标,从而对滑模变结构控制进行评估和优化。
滑模控制matlab
滑模控制matlab
滑模控制在控制理论中是一种重要的控制策略,它具有很好的鲁棒性和快速响应的特点。
在matlab中,可以通过编写程序实现滑模控制算法。
具体实现步骤包括:首先编写系统模型,然后设计滑模控制器并实现,最后进行仿真实验验证算法的有效性。
在matlab中,可以通过命令行或编写脚本来实现滑模控制算法。
其中,命令行的实现方式相对较简单,只需要输入相关命令即可完成控制器的设计与仿真实验。
而编写脚本则可以更加灵活地设计算法,并且可以对控制器的参数进行优化。
在实现滑模控制算法时,需要注意控制器的鲁棒性与快速响应之间的平衡。
过高的鲁棒性会导致响应时间变慢,而过高的响应速度则可能会导致系统失稳。
因此,在实际应用中需要根据具体情况进行权衡和调整。
总之,滑模控制在matlab中的实现非常方便,可以通过编写程序实现控制器的设计与仿真实验。
同时,需要注意控制器的鲁棒性与响应速度的平衡,以保证系统的稳定性和性能。
- 1 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于趋近律的滑模控制
一、基于趋近律的滑模控制1、控制器的设计针对状态方程
Bu Ax x
+= (1)
采用趋近律的控制方式,控制律推导如下:
Cx s =(2)slaw x C s
== (3)
其中slaw 为趋近律。
将状态方程式(1)代人(2)得
)()(1s
CAx CB u +-=-(4)
可见,控制器的抖振程度取决于趋近律s
表达式中的切换项。
2、仿真实例
对象为二阶传递函数:
as
s b
s G p +=
2)(其中a=25,b=133。
)(s Gp 可表示为如下状态方程:
Bu Ax x
+= 其中⎢⎣⎡=00A ⎥⎦⎤-251,⎥⎦
⎤
⎢⎣⎡=1330B 。
在仿真程序中,M=1为等速趋近律,M=2为指数趋近律,M=3为幂次趋近律,M=4为一般趋近律。
取M=2,采用指数趋近律,其中C=[15,1],ε=5,k=10,作图取样时间为0.001,仿真程序如下。
二、程序主程序chap2_4.m clear all;close all;
global M A B C eq k
ts=0.001;
T=2;
TimeSet=[0:ts:T];
c=15;
C=[c,1];
para=[c];
[t,x]=ode45('chap2_4eq',TimeSet,[0.500.50],[],para);
x1=x(:,1);
x2=x(:,2);
s=c*x(:,1)+x(:,2);
if M==2
for kk=1:1:T/ts+1
xk=[x1(kk);x2(kk)];
sk(kk)=c*x1(kk)+x2(kk);
slaw(kk)=-eq*sign(sk(kk))-k*sk(kk);%Exponential trending law
u(kk)=inv(C*B)*(-C*A*xk+slaw(kk));
end
end
figure(1);
plot(x(:,1),x(:,2),'r',x(:,1),-c*x(:,1),'b');
xlabel('x1');ylabel('x2');
figure(2);
plot(t,x(:,1),'r');
xlabel('time(s)');ylabel('x1');
figure(3);
plot(t,x(:,2),'r');
xlabel('time(s)');ylabel('x2');
figure(4);
plot(t,s,'r');
xlabel('time(s)');ylabel('s');
if M==2
figure(5);
plot(t,u,'r');
xlabel('time(s)');ylabel('u');
end
子程序chap2_4eq.m
function dx=DynamicModel(t,x,flag,para)
global M A B C eq k
a=25;b=133;
c=para(1);
s=c*x(1)+x(2);
A=[01;0-a];
B=[0;b];
M=2;
eq=5.0;
if M==2%M=1为等速趋近律,M=2为指数趋近律,
M=3为幂次趋近律,M=4为一般趋近律slaw=-eq*sign(s);%Equal velocity trending law
elseif M==2
k=10;
slaw=-eq*sign(s)-k*s;%Exponential velocity trending law
elseif M==3
k=10;
alfa=0.50;
slaw=-k*abs(s)^alfa*sign(s);%Power trending law
elseif M==4
k=1;
slaw=-eq*sign(s)-k*s^3;%General trending law
end
u=inv(C*B)*(-C*A*x+slaw);dx=zeros(2,1);dx(1)=x(2);dx(2)=-a*x(2)+b*u;
三、仿真结果
(1)M=2时,指数趋近律
-0.1
00.10.2
0.30.40.50.6
x1
x 2
图1滑模运动的相轨迹
0.20.40.60.8
1 1.
2 1.4 1.6 1.82
time(s)
x 1
图2
x 1的收敛过程
00.20.40.60.8
1 1.
2 1.4 1.6 1.82
-2.5
-2
-1.5
-1
-0.5
0.5
time(s)
x 2
图3
x 2的收敛过程
0.20.40.60.8
1 1.
2 1.4 1.6 1.82
-101234567
8time(s)
s
图4切换函数s
00.20.40.60.8
1 1.
2 1.4 1.6 1.82
time(s)
u
图5控制器输出
(2)M=1时,等速趋近律
00.10.20.3
0.40.50.60.7
x1
x 2
图1滑模运动的相轨迹
0.20.40.60.8
1 1.
2 1.4 1.6
1.82
time(s)
x 1
图2
x 1的收敛过程
0.20.40.60.8
1 1.
2 1.4 1.6 1.82
time(s)
x 2
图3
x 2的收敛过程
0.20.40.60.8
1 1.
2 1.4 1.6 1.82
time(s)
s
图4切换函数s
(3)M=3时,幂次趋近律
0.10.20.3
0.40.50.60.7
x1
x 2
图1滑模运动的相轨迹
0.20.40.60.8
1 1.
2 1.4 1.6
1.82
time(s)
x 1
图2
x 1的收敛过程
0.2
0.4
0.6
0.8
1 1.2
1.4
1.6
1.8
2
time(s)
x 2
图3
x 2的收敛过程
0.20.40.60.8
1 1.
2 1.4 1.6 1.8
2
time(s)
s
图4切换函数s
(4)M=4时,一般趋近律
-0.100.10.2
0.30.40.50.6
x1x 2
图1滑模运动的相轨迹
00.20.40.60.81
1.2 1.4 1.6
1.82
time(s)x 1
图2x 1的收敛过程
00.20.40.60.81
1.2 1.4 1.6 1.82
time(s)x 2
图3
x 2的收敛过程00.20.40.60.81
1.2 1.4 1.6 1.82
-10
1
2
3
4
5
6
7
8
time(s)s
图4切换函数s。