滑模变结构控制matlab仿真
基于AMESim和MATLAB联合仿真的EHA滑模变结构控制分析

基于AMESim和MATLAB联合仿真的EHA滑模变结构控制分析纪铁铃;齐海涛;滕雅婷【摘要】分析了电动静液作动器(EHA,Electro-Hydrostatic Actuator)系统的结构组成与工作原理,建立了其数学模型,将滑模变结构控制用于控制EHA的位置环,建立了包含滑模变结构位置控制环、PI转速控制环、PI电流控制环的EHA控制器结构,并设计了滑模变结构控制器.最后使用AMESim和MATLAB软件建立了EHA 机械、液压部分的模型和电机、控制器的模型,进行联合仿真,并对仿真结果进行分析.仿真结果表明,滑模变结构用于控制EHA是可行的,并且可以提高系统的频响,使系统获得较大的刚度和较好的稳态精度.【期刊名称】《液压与气动》【年(卷),期】2016(000)003【总页数】6页(P19-24)【关键词】滑模变结构;EHA;AMESim;MATLAB;联合仿真【作者】纪铁铃;齐海涛;滕雅婷【作者单位】北京航空航天大学工程训练中心,北京100191;北京航空航天大学工程训练中心,北京100191;北京航空航天大学机械工程及自动化学院,北京100191【正文语种】中文【中图分类】TH137;V227引言功率电传(PBW,Power-By-Wire)作动器是未来多/全电飞机的关键技术,电动静液作动器(EHA)是功率电传作动器的主要形式,但由于EHA系统存在非线性和参数摄动,用简单的 PID 控制不能满足鲁棒性要求[1,2]。
滑模变结构控制中滑模动态的不变性使被控对象对非线性因素引起的系统不确定性具有理想的鲁棒性。
常规的控制系统通常采用连续性控制,而滑模变结构控制系统的“结构”是一种呈现开关特性的非连续性控制,这种开关特性与时间变化相关。
一般所说的“滑动模态”运动是指在系统的上述开关特性作用下按照预定状态轨迹进行高频小幅的上下运动[3~5]。
将滑模变结构控制应用于EHA控制中,将极大地弥补非线性因素对EHA 系统性能的影响,提升系统的鲁棒性,达到较好的稳态精度。
永磁同步电机滑膜变结构MATLAB仿真
永磁同步电机滑膜变结构MATLAB仿真吴祥瑞;高键【摘要】针对多变量,非线性,强耦合的永磁同步电机(PMSM)系统设计了一种转速控制器,利用滑模控制的鲁棒性强,可以弥补传统PI控制鲁棒性弱的缺点,设计了滑模转速控制器.首先介绍了PMSM矢量控制下的坐标变换,然后建立了转速滑模控制器,并证明了稳定性,其次介绍了SVPWM的步骤,最后以MATLAB进行了仿真验证,结果表明所设计控制器较传统控制抑制抖振效果佳,控制性能好.%For multi-variable,nonlinear,strong coupling of Permanent Magnet Synchronous Motor (PMSM),a speed controller system design,the use of robust sliding mode control is strong,it can make up for the traditional PI control robustness weak shortcomings design sliding speed controller!introduces the coordinate transformation under PMSM vector control,and the establishment of a sliding mode speed controller,and prove the stability,followed by the introduction SVPWM steps were finally MATLAB simulation results show that the controller design than traditional control suppressing buffeting good effect,good control performance.【期刊名称】《电子设计工程》【年(卷),期】2017(025)011【总页数】4页(P111-113,118)【关键词】永磁同步电机;坐标变换;滑模控制;SVPWM【作者】吴祥瑞;高键【作者单位】江苏科技大学江苏镇江212000;江苏科技大学江苏镇江212000【正文语种】中文【中图分类】TN99永磁同步电机因为其使用方便、可靠性高、性能优越等优点,广泛运用于交流伺服系统中。
滑模控制原理matlab程序
一、概述滑模控制是一种能够有效应对参数变化和外部干扰的控制方法,其原理是通过引入滑动模式,在滑动面上保持系统状态以抑制干扰和变化。
在实际工程中,滑模控制由于其优越的性能和鲁棒性,在许多领域得到了广泛的应用。
本文将探讨滑模控制的原理以及如何利用Matlab编程实现滑模控制。
二、滑模控制的原理滑模控制的核心思想是通过引入滑模面,将系统状态限制在该面上,从而使系统能够快速、稳定地达到期望状态,并能够抵抗外部干扰和参数变化。
滑模控制的设计基于Lyapunov稳定性理论,在这种控制策略下,系统状态会迅速收敛到滑模面上,并在该面上保持稳定。
滑模控制的设计和实现通常包括以下步骤:1. 确定系统模型和状态空间表示。
这一步需要对待控制的系统进行建模,并将其表示为状态空间形式,以便后续控制器设计和分析。
2. 设计滑模面和滑模控制规则。
根据系统模型和性能指标,确定滑模面的设计思路和控制规则。
3. 分析系统的稳定性和鲁棒性。
利用Lyapunov稳定性理论等分析方法,分析设计的滑模控制策略在系统稳定性和鲁棒性方面的性能。
4. 仿真验证和调试。
利用Matlab等仿真软件进行滑模控制器的设计和调试,验证设计的控制策略在仿真环境下的性能。
三、Matlab程序实现滑模控制在Matlab中实现滑模控制通常涉及到以下几个方面的内容:1. 状态空间模型表示首先需要将待控制的系统模型表示为状态空间形式,通常可以利用Matlab中的state-space函数来进行。
对于一个一阶线性系统,可以使用以下代码来表示其状态方程:```A = [0 1; -1 -1];B = [0; 1];C = [1 0];D = 0;sys = ss(A, B, C, D);```2. 滑模面设计和控制规则利用Matlab进行滑模面设计和控制规则的制定通常涉及到一些数学运算和符号计算。
针对一个二阶系统,可以利用Matlab的符号计算工具箱来求解滑模面的方程和控制规则的设计。
matlab模糊滑模控制算法
MATLAB是一种被广泛应用的技术计算软件,它提供了许多用于工程和科学计算的功能和工具。
模糊控制是一种基于模糊集合理论的控制方法,它可以处理非线性系统和模糊信息,因此在工程控制领域得到了广泛的应用。
滑模控制是一种鲁棒控制方法,它能够有效地应对系统参数的不确定性和外部干扰,因此在控制系统中具有重要的地位。
在很多实际的工程控制问题中,系统的动态模型可能非常复杂,无法用传统的线性方程描述,而且系统的动态特性可能会受到各种不确定因素的影响。
在这种情况下,传统的控制方法可能无法很好地处理这些复杂的系统。
而模糊滑模控制算法就是为了解决这些问题而提出的。
下面将介绍MATLAB中模糊滑模控制算法的基本原理和实现方法。
一、模糊控制1.1 模糊集合模糊控制是一种基于模糊集合理论的控制方法。
在传统的控制理论中,系统的输入和输出都是确定的实数值,而在模糊控制中,输入和输出都可以是模糊的概念,比如"很小"、"中等"、"很大"等。
这样就可以更好地描述一些非精确的系统和模糊的信息。
1.2 模糊控制原理模糊控制的基本原理是通过模糊化和解模糊化的过程,将模糊的输入转换成模糊的输出。
在模糊控制中,通常需要设计一个模糊推理系统,它包括模糊化接口、模糊规则库、模糊推理引擎和解模糊化接口。
通过模糊化接口将输入转换成模糊的概念,然后通过模糊规则库和模糊推理引擎得到模糊的输出,最后再通过解模糊化接口将模糊的输出转换成确定的实数值。
1.3 模糊控制在MATLAB中的实现在MATLAB中,可以使用模糊逻辑工具箱(Fuzzy Logic Toolbox)来实现模糊控制。
用户可以通过该工具箱快速地建立模糊推理系统,定义模糊变量、模糊集合和模糊规则,并进行模糊推理和解模糊化操作。
二、滑模控制2.1 滑模面滑模控制是一种基于滑模面原理的控制方法。
在滑模控制中,通常需要设计一个滑模面,它是系统状态变量的一个线性组合,通过控制系统状态变量在滑模面上运动,实现对系统的控制。
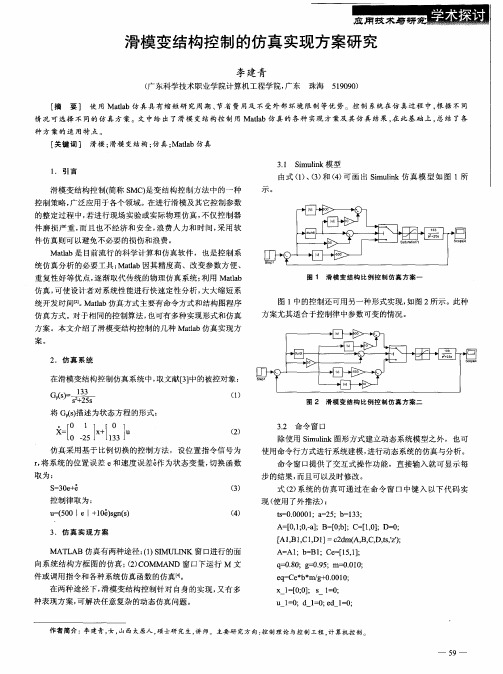
滑模变结构控制的仿真实现方案研究
31 Smuik模 型 . i l n
1 引言 .
由 式 () () () 画 出 Smui 1、 3 和 4 可 i l k仿 真 模 型 如 图 1所 n
不 。
滑模变结构控制( 简称 S ) MC 是变结构控制 方法中 的一种
控制策略 , 广泛应用于各个领域 。在进行滑模及其它控 制参 数
r()2 k・ l dl )2d() r l l = )_ ; r( = r - _ ; k r k kd
x= 0 l s00 1 T I k [, ;t .0 ; = ; o =
暴骊砬甬 皎未茸 磷完
r l ;r2 O t l ; 0 = ;c 0 r
_
再建 一个 M 文件 sdn man l ig i. 对 上 述 系 统 求 值 及 绘 i m,
_
f r -1 15 o k : :0
图, 代码 如 下 。
S i i g man m l n d i.
式 () 统 的 仿 真 可 通 过 在 命 令 窗 口 中键 入 以下 代 码 实 2系 现 ( 用 了外 推 法 ) 使 :
控制律取 为: u (o el l ̄sns =5 ol + O) ( g )
3 .仿 真 实现 方 案
() 4
t= , 0 0 ;a 2 ;b 3 ; s 0 0 0 1 = 5 =1 3
将 G(描述为状态方程的形式: o) s
() 1
图 2 滑 模 变 结 构 比例 控 制 仿 真 方 案 二
文『 — 5 1 『 U : j +0J o 2 【133 X 【 0
( 2 )
32 命 令 窗 口 . 除使 用 Sm l k图 形 方 式 建 立 动 态 系 统 模 型 之 外 ,也 可 i ui n
Matlab技术在滑模控制中的应用
Matlab技术在滑模控制中的应用导论自动控制领域一直以来都是科学研究和实践工程中至关重要的部分。
在这个领域中,滑模控制一直被认为是一种高效而且实用的控制策略。
近年来,随着计算机技术的飞速发展,Matlab软件的应用在滑模控制领域中得到了广泛的认可和应用。
本文将探讨Matlab技术在滑模控制中的应用,以及其在该领域中的优势和局限性。
滑模控制基础滑模控制是一种经典的非线性控制方法,其主要目标是通过在系统状态空间中引入一个滑模面,使系统状态在滑模面上滑动,从而实现对系统的控制。
滑模控制具有快速响应、鲁棒性强和容错能力强的特点,因此广泛应用于众多领域,如机械控制、电力系统和自动驾驶等。
Matlab在滑模控制设计中的应用Matlab作为一种功能强大且广泛应用的科学计算软件,为滑模控制的设计和实现提供了丰富的工具和函数。
Matlab可以用于系统建模、控制器设计、仿真和分析结果等方面。
首先,在系统建模方面,Matlab提供了简单易用的建模工具。
用户可以使用Simulink模块来建立系统的数学模型,选择合适的模型类型和参数值,并将系统的输入输出关系进行建模。
此外,Matlab还提供了符号计算工具,可以通过数学公式进行系统建模,更加精确地描述系统的动态特性。
其次,在滑模控制器设计方面,Matlab提供了多种设计方法和函数。
用户可以使用Matlab中的控制系统工具箱中的函数来设计滑模控制器的参数。
根据系统的状态空间模型,用户可以选择合适的滑模面和控制参数,并通过Matlab对系统的频率响应和稳态性能进行分析和优化。
此外,Matlab还提供了强大的滑模控制仿真和分析工具。
用户可以使用Matlab 中的Simulink模块进行系统的仿真和模拟,通过设置不同的控制器参数和输入信号,观察系统的响应和性能。
同时,Matlab还可以进行系统的优化和鲁棒性分析,帮助用户评估滑模控制的鲁棒性和稳定性。
Matlab在滑模控制中的优势Matlab在滑模控制中具有许多优势。
离散系统变结构控制及matlab仿真
变换 , 系统化成 了简约型 ,并利 用趋近率 的 将
方法设计 了离散 系统 的变结构控制器 ,并给 出 了仿真结果 ,以此来证 明这种方法的有效性 。
2 相关 的基 本 定义和 定理 .
理想 准滑 模是 发 生在 切 换 面 S x k ) = (( ) cx 上的运动 , r: 故应满足
变结构控制经过数十年 的发展 ,已经 自成 体系,成为 自动控制系统的一种重要的设计方 法。变结构控制系统的核心是滑动模态 ,滑动
模态 具有 理 想 的 不 变Βιβλιοθήκη ,正 是 这 种 不 变 性 ,引
【 xk ) Cxk , k = 00 T s0 s () = T()x() x, 一 k t ( t
】
将系统 ( ) 2 变换成
f( 1 Y k+ )=Al 。 ) ’ + 。 。 lY( + s ) :Y ’ ( ’
l ( k—T ’ k一 )+ s ) (
一 一
经 式
lk 1 = Y() + Y + ) l + 芝s ) 。 s ( (
把 s )= .x + = ( 2 7 。 O 带如(0 式 , o 1 ) 得到 理想滑动模态方程为
】
计算差分, 结合( ) 4 式得
5k+1 ( )一s k ( )=C ( ~ k+1 )一C k ( )= CA ‘ k + CA ( — T + Cb ( ) = r ’ ) ( k ) u k
= 。 一
( ) ' ( 一 C 6 一CA‘ ( — ) C 6 一CA‘ ) ( ) ' k ’ () 3
则从任意状 态 出发的滞后离 散 系统 ( ) 的运 1 动,若在有 限步 到达切换面 s,然后在其上运
滑模控制matlab
滑模控制matlab
滑模控制在控制理论中是一种重要的控制策略,它具有很好的鲁棒性和快速响应的特点。
在matlab中,可以通过编写程序实现滑模控制算法。
具体实现步骤包括:首先编写系统模型,然后设计滑模控制器并实现,最后进行仿真实验验证算法的有效性。
在matlab中,可以通过命令行或编写脚本来实现滑模控制算法。
其中,命令行的实现方式相对较简单,只需要输入相关命令即可完成控制器的设计与仿真实验。
而编写脚本则可以更加灵活地设计算法,并且可以对控制器的参数进行优化。
在实现滑模控制算法时,需要注意控制器的鲁棒性与快速响应之间的平衡。
过高的鲁棒性会导致响应时间变慢,而过高的响应速度则可能会导致系统失稳。
因此,在实际应用中需要根据具体情况进行权衡和调整。
总之,滑模控制在matlab中的实现非常方便,可以通过编写程序实现控制器的设计与仿真实验。
同时,需要注意控制器的鲁棒性与响应速度的平衡,以保证系统的稳定性和性能。
- 1 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
滑模变结构控制matlab仿真
滑模变结构控制(Sliding Mode Variable Structure Control,SMC)是一种应用广泛的控制方法,其在工程领域中有着重要的应用价值。
本文将以MATLAB仿真为基础,介绍滑模变结构控制的原理以及在控制系统中的应用。
滑模变结构控制是一种非线性控制方法,其核心思想是通过引入滑模面来实现系统的稳定和鲁棒性。
滑模面是一个高频振荡的超平面,通过控制系统的输出使得系统状态在滑模面上运动,从而实现对系统的控制。
滑模变结构控制具有很强的鲁棒性,对于参数扰动、外部干扰等都有很好的抑制能力。
在MATLAB中进行滑模变结构控制的仿真实验可以帮助我们更好地理解该控制方法的原理和特点。
首先,我们需要建立一个控制系统的数学模型,在MATLAB中进行仿真。
然后,根据系统模型设计滑模面和滑模控制律,并将其应用于控制系统中。
最后,通过MATLAB的仿真环境,观察控制系统的响应和性能指标。
在滑模变结构控制的仿真实验中,我们需要注意以下几个方面。
首先,选择合适的系统模型,可以是线性模型或非线性模型。
其次,需要确定滑模面的设计方法,例如采用单纯滑模面、多项式滑模面或者自适应滑模面。
滑模面的设计直接关系到控制系统的性能和稳定性。
然后,需要设计滑模控制律,即根据滑模面的设计方法确定
控制系统的控制策略。
最后,通过MATLAB的仿真工具进行系统仿真,并观察系统的响应和性能指标。
滑模变结构控制在实际工程中有着广泛的应用。
例如在机器人控制、飞行器控制、电力系统控制等领域都有着重要的应用价值。
滑模变结构控制具有很强的鲁棒性和适应性,对于参数扰动和外部干扰有很好的抑制能力,因此在复杂环境下仍然能够保持系统的稳定性。
在滑模变结构控制的仿真实验中,我们可以通过改变系统模型、滑模面的设计方法和滑模控制律等参数,来观察不同参数对系统性能的影响。
通过仿真实验,可以得到系统的响应曲线、稳定性分析、收敛速度等性能指标,从而对滑模变结构控制进行评估和优化。
滑模变结构控制是一种应用广泛的控制方法,具有鲁棒性强、适应性好的特点。
通过MATLAB的仿真实验,可以更好地理解滑模变结构控制的原理和特点,并对控制系统进行性能评估和优化。
滑模变结构控制在工程领域中有着重要的应用价值,对于提高系统的稳定性和鲁棒性具有重要意义。