基于滑模变结构控制的叉车线控转向系统研究
电动叉车线控转向系统的设计
科技资讯2015 NO.29SCIENCE & TECHNOLOGY INFORMATION工 业 技 术叉车是最为常见专用车辆,其工作场所、运输对象等因素决定了其要有较高的转向特性。
线控转向系统经过几代转向系统的改善与发展,省去了转向盘与转向执行机构之间的机械连接机构,由电机提供转向力矩和路感信息,实现了对车辆转向系统的主动控制,提高了车辆的操纵稳定性,使用于叉车转向系统。
该文以TE30型电动叉车为研究对象,阐述线控转向系统的原理,介绍其组成部件,分析其数学模型。
传动比可根据驾驶员驾驶的舒适度进行自由设计是线控转向系统最大的特点,因此设计线控转向系统重点在于设计传动比函数。
横摆角速度增益是车辆操作稳定性的指标之一,该文用其衡量传动比函数设计的合理性。
1 线控转向系统工作原理与模型线控转向系统由5个部分组成,分别为:转向盘总成、转向执行总成、控制器(ECU)、自动防故障系统和电源。
1.1 线控转向系统工作原理线控转向系统的工作原理:当驾驶员转动把手(即方向盘)时,传感器将转矩信号、转角信号及车速信号等转换为电信号并传递给主控制器ECU,ECU对这些传感器传来的信号进行分析与计算并发出控制转向电机的指令,最终实现车轮的转向[1]。
没有了转向盘与把手之间的机械连接,传动比也不再是固定值。
1.2 线控转向系统模型TE30型电动叉车相对于其他叉车结构较为简单,建模时可忽略非线性部分进行合理简化,简化为只包含把手、转向轴、转向电机、齿轮和转向轮等几个重要动力学元件的物理模型[4]。
转向手把模块数学模型:212sw swsw sw swd d d T J B T dt dtθθ--= (1)(1)路感电机模型。
21111112m m d m m m d d TT J B dt dt Gθθ--= (2)路感电机电枢回路的方程为:1111111a m a e a di d R i L k U dt dtθ++= (3)111m t a T k i =(4)由电机机械特性有:22222221m m am m m d d T T J B dt dt G θθ--= (5)①基金项目:中山市科技计划项目(No.2013A3FC0271)。
基于滑模和PI的多轴转向系统交叉耦合控制

制。以 纵行转 向 为例仿真验证 了 控制算法的 有效性。
关键 词 :工程车辆 转 向系统i滑模控制i交叉耦合控制 中图分类号 :T 2 1 P 7. 4 文献标志码 :A 文章编号 :17 —7 8(0 00 —0 1 —6 6 3 102 1) 1 0 5
B in 0 9 , hn ) e'g1 1 1C ia j i 0
A b t a t a n o s u t n v hcewh c d p n e td v nb -xsse r g s tm stesu yp ooy e te s r c :T kig ac n t ci e il ih i i e e d n r e y 8 a i tei ys r o sn i n e a td r ttp , h h co sc u l g c n o ta g sd su sd t mp o ete c n o ra c rc . ekn mai n lsso r s-o p i o t l r t y i ic se o i r v o tu c u a y Th ie t a ay i fmut a i te ig n r s e h c l—x sse r i n s se n o ss n o pige rri to u e . c r igt ewo kn r il f lcr- y r ui e v e h ns , y tm a dc n it t u l ro i r d c e c n sn d Ac o d t r igp i p eo ee toh d a l s rom c a im n o h nc c
基于线控转向的主动转向控制策略解析

基于线控转向的主动转向控制策略解析发布时间:2023-01-29T05:53:55.986Z 来源:《科技新时代》2022年9月16期作者:朱联邦[导读] 随着相关技术的发展,朱联邦安徽江淮汽车集团股份有限公司安徽合肥 230601摘要:随着相关技术的发展,促进了电子技术、汽车控制技术、人工智能等技术发展,智能汽车已经是未来汽车发展的重要趋势,线控转向技术的出现,非常符合当下汽车发展需求,运用线控转向改变了机械转向结构,而且灵活性更强,同时还有效地改善和提高了汽车转向的特性。
因此加强对线控技术研究,符合汽车行业的未来发展。
关键词:线控转向;主动转向;控制策略转向系统是汽车底盘当中不可缺少的部分﹐主要的作用就是在静止和行驶状态下,根据驾驶员驾驶意图行驶。
从汽车诞生开始转向系统也在不断地更新,而线控转向技术的出现,有效地改善了汽车转向特征。
随着科技的不断发展,无人驾驶、自动驾驶、智能汽车等先进技术的出现,促进了汽车技术发展,尤其是线控技术不断成熟的情况下,使这些先进的汽车安全性更高,稳定性更强。
线控转向作为全新的转向系统,不仅拥有机械转向功能,还具备了一些其他特征。
所以探索线控转向技术探索,可以很大程度推动汽车行业发展。
1线控转向系统基本情况分析1.1系统构成完整的线控转向系统,主要有以下三个部分构成。
第一,是ECU控制器。
ECU是重要的控制单元,也是线控转向系统的核心,主要功能就是接收、处理、输出各种相关控制信号。
当ECU接收到输入转向意图信号时,车辆就会立刻响应和反馈这个信号,然后根据预先设置的策略输出控制指令,从而控制转向系统机,不仅保证了输出转角,同时也完成了驾驶意图,通过这些信息可以确保驾驶者能够感知汽车运行状态,还有路面的相关信息。
第二,是方向盘模块。
驾驶员输入转向意图时,通过传感器将意图转换为物理信号,然后转换成数字信号,并传递到ECU控制单元。
当电机接收到ECU信号指令以后,就会做出相应动作,保证驾驶者可以感知运行状态。
基于滑模变结构方法的永磁同步电机控制问题研究及应用
基于滑模变结构方法的永磁同步电机控制问题研究及应用一、本文概述本文旨在探讨和研究基于滑模变结构方法的永磁同步电机(PMSM)控制问题,以及该方法在实际应用中的可行性。
滑模变结构控制作为一种非线性控制策略,因其对系统参数摄动和外部干扰的强鲁棒性,被广泛应用于各种控制系统中。
永磁同步电机作为一种高性能电机,在工业、交通、能源等领域有着广泛的应用。
因此,研究基于滑模变结构方法的永磁同步电机控制问题,不仅具有理论价值,而且具有实际意义。
本文将首先介绍永磁同步电机的基本结构和工作原理,分析其在控制过程中面临的主要问题和挑战。
然后,详细阐述滑模变结构控制的基本原理和实现方法,包括滑模面的设计、控制律的构造以及滑模运动的稳定性分析等。
接着,将滑模变结构控制方法应用于永磁同步电机的控制系统中,构建相应的控制系统模型,并进行仿真分析和实验研究。
在仿真分析和实验研究中,我们将对比传统的控制方法和基于滑模变结构方法的控制效果,评估滑模变结构控制在永磁同步电机控制系统中的性能表现。
我们还将探讨如何优化滑模变结构控制方法,以进一步提高永磁同步电机的控制精度和动态响应性能。
本文将总结滑模变结构方法在永磁同步电机控制中的应用效果和经验教训,展望未来的研究方向和应用前景。
通过本文的研究,希望能够为永磁同步电机的控制问题提供一种新的解决方案,推动永磁同步电机控制技术的发展和应用。
二、永磁同步电机及滑模变结构控制基本原理永磁同步电机(PMSM)是一种将电能转化为机械能的装置,具有高效、高功率密度和良好调速性能等优点,因此在许多领域得到广泛应用。
PMSM的控制核心在于如何精确控制其电磁转矩,以实现快速、稳定的转速和位置控制。
滑模变结构控制(Sliding Mode Control, SMC)是一种非线性控制方法,具有对参数摄动和外部干扰的强鲁棒性,因此在PMSM控制中得到了广泛关注。
滑模变结构控制的基本原理是通过设计一个滑模面,使得系统状态在滑模面上做高频小幅度运动,即所谓的“滑动模态”。
基于线控技术的四轮转向全滑模控制
Ab s t r a c t:A t o t a l s l i d i n g mo d e c o n t r o l l e r i s p r o p os e d t o i mp r o v e t h e s t a b i l i t y f o r f o u r — wh e e l s t e e r i n g ve h i c l e wi h s t t e e r — b y— wi r e t e c h n o l o g y. By c o n ro t l l i n g t he s t e e in r g a n g l e o f f r on t wh e e l a nd r e a r wh e e l ,t he t o t a l s l i d i n g mod e c o n t r o l l e r c a n ma k e he t r e a l bo d y s i d e s l i p ng a l e nd a y a w r a t e t r a c k he t i de a l bo d y s i d e s l i p ng a l e nd a y a w r a t e.Th e i nt e g r a t i o n o f ra t c k i n g e r r o r i s c o ns i d e r e d i n he t s l i d i ng s u r f a c e t o e ns u r e he t ra t c in k g e ro r t o b e z e r o.Th e n,a s t a b l e c o n d i t i o n i s g i v e n b a s e d o n Lya p u n ov he t o r y . Th e c o n v e n io t n a l ro f n t wh e e l s t e e in r g,f o u r — wh e e l s t e e r i n g wi h t c o mmo n s l i d i n g mo de c o n - ro t l nd a t o t a l s l i d i n g mo d e c o n ro t l a r e c o mpa re d by s i mu l a t i o n s u n de r d i f f e r e n t v e h i c l e mo d e l s nd a d i f f e r e n t c o n d i i t on s .The r e s u l t s s h ow t h a t t he t o t a l s l i d i n g c o n t r o l no t o n l y e n s u r e s he t ra t c i ng k e ro r t o be z e r o,b u t ls a o i mp r o v e s he t r o b u s t n e s s t o r e s i s t he t e x t e r na l di s t u r b nc a e nd a he t c h ng a e o f s y s —
基于滑模变结构控制的HEV电动力系统控制器研究的开题报告
基于滑模变结构控制的HEV电动力系统控制器研究的开题报告一、选题背景和意义随着能源危机的日益明显,HEV(混合动力电动汽车)已经成为未来汽车发展的重要方向。
在HEV电动力系统中,电动机嵌入式控制器是实现能量转换和动力调节的核心部件。
为了满足HEV的高效、可靠和安全的运行要求,需要开发一种新的电动力系统控制策略,以提高其控制精度和实时性。
基于滑模变结构控制的控制器研究已成为当前电动力系统控制策略的重要研究方向。
其通过引入滑模控制算法,使得系统具有快速响应、鲁棒性和抗扰性等特性。
因此,本研究旨在研究基于滑模变结构控制的HEV电动力系统控制器,以提高其在实际运行中的性能和适应性。
二、研究内容和方法1. 研究HEV电动力系统控制器的原理和结构,分析其现有控制策略的优缺点,提出改进方案;2. 研究滑模控制和变结构控制的基本原理和应用方法,结合HEV电动力系统的特点,设计滑模变结构控制器;3. 建立HEV电动力系统的数学模型,并基于MATLAB/Simulink平台进行仿真实验,评估滑模变结构控制器的性能和适应性;4. 在实际HEV电动力系统中进行控制器调试和验证,比较滑模变结构控制器与现有控制策略的性能差异。
三、研究预期成果本研究预期通过引入滑模变结构控制算法,提高HEV电动力系统的控制精度和实时性,在实际运行中具有更好的性能和适应性。
同时,本研究还将对滑模变结构控制算法的理论研究和应用方法做出一定的贡献,为未来HEV电动力系统控制策略的改进提供基础和参考。
四、进度安排第一年:学习HEV电动力系统的原理和常见控制策略,学习滑模控制和变结构控制的基础知识,研究HEV电动力系统的数学模型,并进行Matlab/Simulink仿真实验。
第二年:设计基于滑模变结构控制的HEV电动力系统控制器,进行实验验证,并对控制器进行改进和优化。
第三年:深入探究滑模变结构控制算法理论和应用方法,并撰写学位论文。
五、参考文献1. 余金贵,赖云胜. 汽车电动机控制与应用. 武汉:华中科技大学出版社,2014.2. 赵志超,李斌. 基于滑模变结构控制的变速器换挡控制策略研究. 汽车技术,2018,(4):54-57。
基于自适应终端滑模控制的汽车线控转向控制方法[发明专利]
![基于自适应终端滑模控制的汽车线控转向控制方法[发明专利]](https://img.taocdn.com/s3/m/ca6bd8ea0740be1e640e9a56.png)
专利名称:基于自适应终端滑模控制的汽车线控转向控制方法专利类型:发明专利
发明人:王海,李正浩,陈睿智,郁明,姜苍华
申请号:CN201710406612.4
申请日:20170602
公开号:CN107284519A
公开日:
20171024
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于自适应终端滑模控制的汽车线控转向系统控制方法,步骤包括实时采集前轮转角δ和方向盘转动参考角θ,定义跟踪误差e为前轮转角δ和方向盘转动参考角θ的差值,并通过一阶微分计算得到和接着将e和输入终端滑模平面进行计算得到终端滑模变量s,然后对δ、和s进行自适应律计算得到汽车线控转向系统不确定参数和扰动值的上界估计值和汽车线控转向系统参数标称值相关变量并将其与δ、s、一同作为输入量输入到自适应终端滑模控制器中进行计算,得到自适应终端滑模控制器输出u,最后将u传送到转向电机伺服驱动器中给线控转向设备发送电压指令,控制车轮转动,得到理想前轮转角δ′。
申请人:合肥工业大学
地址:230009 安徽省合肥市屯溪路193号
国籍:CN
代理机构:合肥和瑞知识产权代理事务所(普通合伙)
代理人:王挺
更多信息请下载全文后查看。
基于滑模控制的线控转向系统仿真
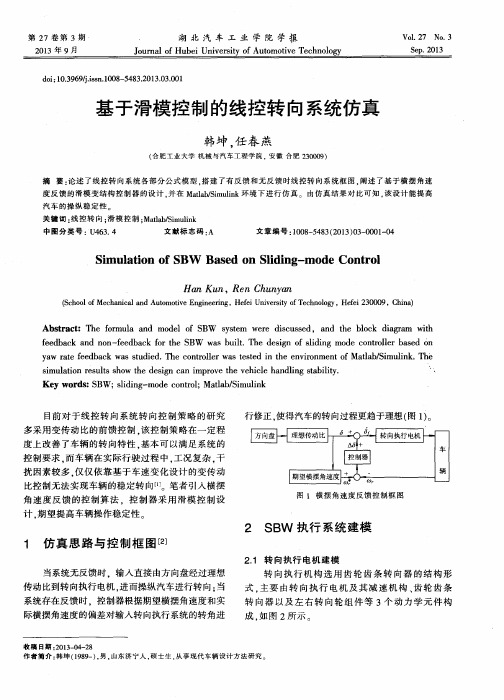
成. 如 图 2所 பைடு நூலகம்
收 稿 日期 : 2 0 1 3 — 0 4 — 2 8 作者简介 : 韩坤 ( 1 9 8 9 一 ) , 男, 山东济宁人, 硕士生 , 从 事现 代 车辆 设 计 方 法 研 究 。
摘 要: 论 述 了线 控 转 向 系统 各 部 分 公 式 模 型 , 搭 建 了有 反 馈 和 无 反 馈 时 线 控 转 向系 统 框 图 , 阐述 了基 于横 摆 角速
度 反 馈 的 滑模 变 结 构 控 制 器 的设 计 , 并 在 Ma t l a b / S i m u l i n k环 境 下 进 行 仿 真 。 由仿 真 结 果 对 比可 知 , 该 设 计 能 提 高
y a w r a t e f e e d b a c k wa s s t u d i e d . T h e c o n t r o l l e r w a s t e s t e d i n t h e e n v i r o n me n t o f Ma t l a b / S i mu l i n k . he T
s i mu l a t i o n r e s u l t s s h o w t h e d e s i g n c a n i mp r o v e t h e v e h i c l e h a n d l i n g s t a b i l i t y . Ke y wo r d s : S BW ;s l i d i n g - mo d e c o n t r o l ; Ma t l a b / S i mu l i n k
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于滑模变结构控制的叉车线控转向系统研究随着现代物流行业的迅速发展,巨大的竞争压力已经使得传统的人工搬运方式无法在运输效率上取得优势,因此以叉车为主的机械化搬运得到了企业的重视,叉车迎来了扩大发展的机遇。
同时线控转向系统的引入为车辆转向系统带来了新的发展理念和技术革新,适用于频繁转向的叉车,可以解决传统转向中存在的弊端,因此对叉车的线控转向技术研究具有重要的理论和实际意义。
本文以三轮转向叉车为研究对象,针对三轮线控叉车转向稳定性和车轮转角跟踪问题,以三轮叉车后轮转向动力学模型和叉车线控转向系统数学模型为基础;然后基于横摆角速度增益恒定的理想变传动比控制策略得到目标后轮转角,并考虑到叉车转向执行机构中不确定参数的约束信息、不确定回正力矩以及路面的干扰信息,设计了滑模变结构转角跟踪控制策略。
仿真结果表明,通过以上两种控制策略的结合,提高了叉车转向的灵敏性和稳定性;同时有效抑制了线控转向系统内部的参数摄动和外部干扰,改善了车轮转角跟踪性能。
为了改善传统后轮叉车转向性能的不足,对全转向线控三轮叉车二自由度转向动力学模型进行了研究。
从人-车闭环角度出发,结合叉车操纵稳定性综合评价指标与遗传算法,优化得出叉车行驶过程中的理想横摆角速度增益。
以零化质心侧偏角和跟踪理想横摆角速度为目的,设计了滑模控制器主动控制叉车前后轮转角,并采用切换增益模糊调节法降低系统抖振。
仿真结果表明,基于滑模控制的全转向线控三轮叉车同时实现了减小质心侧偏角与跟踪理想横摆角速度的控制目标,提高了叉车的操纵稳定性,并有效减轻了驾驶员的驾驶负担。